people
- Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST and his team receive an award for the most outstanding paper in the implementation of robot systems.
- Professor Lim works on AI-based perception, reasoning, and sequential decision-making to develop systems capable of intelligent decision-making, including robot learning

< Photo 1. RSS2023 Best System Paper Award Presentation >
The team of Professor Joseph J. Lim from the Kim Jaechul Graduate School of AI at KAIST has been honored with the 'Best System Paper Award' at "Robotics: Science and Systems (RSS) 2023".
The RSS conference is globally recognized as a leading event for showcasing the latest discoveries and advancements in the field of robotics. It is a venue where the greatest minds in robotics engineering and robot learning come together to share their research breakthroughs. The RSS Best System Paper Award is a prestigious honor granted to a paper that excels in presenting real-world robot system implementation and experimental results.

< Photo 2. Professor Joseph J. Lim of Kim Jaechul Graduate School of AI at KAIST >
The team led by Professor Lim, including two Master's students and an alumnus (soon to be appointed at Yonsei University), received the prestigious RSS Best System Paper Award, making it the first-ever achievement for a Korean and for a domestic institution.
< Photo 3. Certificate of the Best System Paper Award presented at RSS 2023 >
This award is especially meaningful considering the broader challenges in the field. Although recent progress in artificial intelligence and deep learning algorithms has resulted in numerous breakthroughs in robotics, most of these achievements have been confined to relatively simple and short tasks, like walking or pick-and-place. Moreover, tasks are typically performed in simulated environments rather than dealing with more complex, long-horizon real-world tasks such as factory operations or household chores. These limitations primarily stem from the considerable challenge of acquiring data required to develop and validate learning-based AI techniques, particularly in real-world complex tasks.
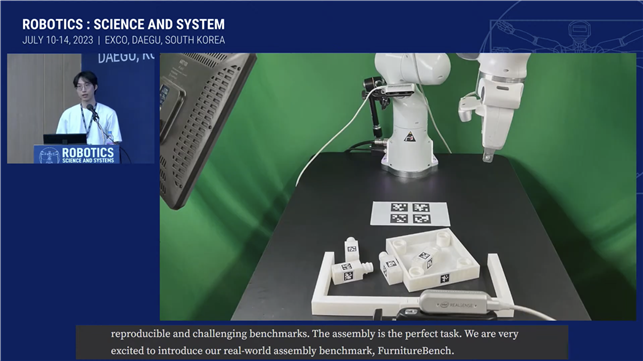
In light of these challenges, this paper introduced a benchmark that employs 3D printing to simplify the reproduction of furniture assembly tasks in real-world environments. Furthermore, it proposed a standard benchmark for the development and comparison of algorithms for complex and long-horizon tasks, supported by teleoperation data. Ultimately, the paper suggests a new research direction of addressing complex and long-horizon tasks and encourages diverse advancements in research by facilitating reproducible experiments in real-world environments.
Professor Lim underscored the growing potential for integrating robots into daily life, driven by an aging population and an increase in single-person households. As robots become part of everyday life, testing their performance in real-world scenarios becomes increasingly crucial. He hoped this research would serve as a cornerstone for future studies in this field.
The Master's students, Minho Heo and Doohyun Lee, from the Kim Jaechul Graduate School of AI at KAIST, also shared their aspirations to become global researchers in the domain of robot learning. Meanwhile, the alumnus of Professor Lim's research lab, Dr. Youngwoon Lee, is set to be appointed to the Graduate School of AI at Yonsei University and will continue pursuing research in robot learning.
Paper title: Furniture Bench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation. Robotics: Science and Systems.

< Image. Conceptual Summary of the 3D Printing Technology >
-
event KAIST’s RAIBO2 becomes the World’s First Robo-dog to Successfully Complete a Full-course Marathon
KAIST's quadrupedal walking robot "RAIBO", which can run seamlessly on sandy beaches, has now evolved into "RAIBO2"and achieved the groundbreaking milestone by becomeing the world's first quadrupedal robot to successfully complete a full-course marathon in an official event. < Photo 1. A group photo of RAIBO2 and the team after completing the full-course marathon > KAIST (President Kwang Hyung Lee) announced on the 17th of November that Professor Je Min Hwangbo's research team of t
2024-11-17 -
event KAIST’s Beach-Roaming Quadrupedal Robot “RAIBO” to Run a Marathon!
“RAIBO”, KAIST’s four-legged robot featuring remarkable agility even on challenging terrains like sandy beaches, is now set to be the first in the world to complete a full marathon. < Photo 1. A group photo of the research team of Professor Je Min Hwangbo (second from the right in the front row) of the Department of Mechanical Engineering who participated in the marathon event at 2024 Geumsan Insam Festival last September > On the 17th of November, KAIST (represen
2024-11-15 -
event Team KAIST Crowned Champion for their World’s Best Ironman, Winning their 2nd Consecutive Win at the Cyborg Olympics
< Group photo of our research team participating in the 3rd Cybathlon > The Cybathlon is an international competition, which aims to help overcome disabilities through the use of robotics technology. KAIST researchers came in third, winning the bronze medal, at their 1st participation in 2016, won their first gold medal at the 2nd competition in 2020, and took back the gold medal at this year’s 3rd competition, successfully defending their champion title. KAIST (President Kwa
2024-10-28 -
event KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration > KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020. K
2024-10-24 -
event The 3rd Global Entrepreneurship Summer School (GESS 2024) Successfully Completed in Silicon Valley
The 2024 Global Entrepreneurship Summer School (2024 KAIST GESS), hosted by the Office of Global Initiatives under the KAIST International Office (Director Man-Sung Yim), was held for the third time. This program allows students to visit Silicon Valley, a global startup hub, to directly experience its famous startup ecosystem and develop their capabilities for global expansion. A total of 20 students were selected through applications, interviews, final presentations, mentoring, and peer evaluat
2024-07-03