system
-
 E. coli Engineered to Grow on CO₂ and Formic Acid as Sole Carbon Sources
- An E. coli strain that can grow to a relatively high cell density solely on CO₂ and formic acid was developed by employing metabolic engineering. -
Most biorefinery processes have relied on the use of biomass as a raw material for the production of chemicals and materials. Even though the use of CO₂ as a carbon source in biorefineries is desirable, it has not been possible to make common microbial strains such as E. coli grow on CO₂.
Now, a metabolic engineering research group at KAIST has developed a strategy to grow an E. coli strain to higher cell density solely on CO₂ and formic acid. Formic acid is a one carbon carboxylic acid, and can be easily produced from CO₂ using a variety of methods. Since it is easier to store and transport than CO₂, formic acid can be considered a good liquid-form alternative of CO₂.
With support from the C1 Gas Refinery R&D Center and the Ministry of Science and ICT, a research team led by Distinguished Professor Sang Yup Lee stepped up their work to develop an engineered E. coli strain capable of growing up to 11-fold higher cell density than those previously reported, using CO₂ and formic acid as sole carbon sources. This work was published in Nature Microbiology on September 28.
Despite the recent reports by several research groups on the development of E. coli strains capable of growing on CO₂ and formic acid, the maximum cell growth remained too low (optical density of around 1) and thus the production of chemicals from CO₂ and formic acid has been far from realized.
The team previously reported the reconstruction of the tetrahydrofolate cycle and reverse glycine cleavage pathway to construct an engineered E. coli strain that can sustain growth on CO₂ and formic acid. To further enhance the growth, the research team introduced the previously designed synthetic CO₂ and formic acid assimilation pathway, and two formate dehydrogenases.
Metabolic fluxes were also fine-tuned, the gluconeogenic flux enhanced, and the levels of cytochrome bo3 and bd-I ubiquinol oxidase for ATP generation were optimized. This engineered E. coli strain was able to grow to a relatively high OD600 of 7~11, showing promise as a platform strain growing solely on CO₂ and formic acid.
Professor Lee said, “We engineered E. coli that can grow to a higher cell density only using CO₂ and formic acid. We think that this is an important step forward, but this is not the end. The engineered strain we developed still needs further engineering so that it can grow faster to a much higher density.”
Professor Lee’s team is continuing to develop such a strain. “In the future, we would be delighted to see the production of chemicals from an engineered E. coli strain using CO₂ and formic acid as sole carbon sources,” he added.
-Profile:Distinguished Professor Sang Yup Leehttp://mbel.kaist.ac.krDepartment of Chemical and Biomolecular EngineeringKAIST
2020.09.29 View 12711
E. coli Engineered to Grow on CO₂ and Formic Acid as Sole Carbon Sources
- An E. coli strain that can grow to a relatively high cell density solely on CO₂ and formic acid was developed by employing metabolic engineering. -
Most biorefinery processes have relied on the use of biomass as a raw material for the production of chemicals and materials. Even though the use of CO₂ as a carbon source in biorefineries is desirable, it has not been possible to make common microbial strains such as E. coli grow on CO₂.
Now, a metabolic engineering research group at KAIST has developed a strategy to grow an E. coli strain to higher cell density solely on CO₂ and formic acid. Formic acid is a one carbon carboxylic acid, and can be easily produced from CO₂ using a variety of methods. Since it is easier to store and transport than CO₂, formic acid can be considered a good liquid-form alternative of CO₂.
With support from the C1 Gas Refinery R&D Center and the Ministry of Science and ICT, a research team led by Distinguished Professor Sang Yup Lee stepped up their work to develop an engineered E. coli strain capable of growing up to 11-fold higher cell density than those previously reported, using CO₂ and formic acid as sole carbon sources. This work was published in Nature Microbiology on September 28.
Despite the recent reports by several research groups on the development of E. coli strains capable of growing on CO₂ and formic acid, the maximum cell growth remained too low (optical density of around 1) and thus the production of chemicals from CO₂ and formic acid has been far from realized.
The team previously reported the reconstruction of the tetrahydrofolate cycle and reverse glycine cleavage pathway to construct an engineered E. coli strain that can sustain growth on CO₂ and formic acid. To further enhance the growth, the research team introduced the previously designed synthetic CO₂ and formic acid assimilation pathway, and two formate dehydrogenases.
Metabolic fluxes were also fine-tuned, the gluconeogenic flux enhanced, and the levels of cytochrome bo3 and bd-I ubiquinol oxidase for ATP generation were optimized. This engineered E. coli strain was able to grow to a relatively high OD600 of 7~11, showing promise as a platform strain growing solely on CO₂ and formic acid.
Professor Lee said, “We engineered E. coli that can grow to a higher cell density only using CO₂ and formic acid. We think that this is an important step forward, but this is not the end. The engineered strain we developed still needs further engineering so that it can grow faster to a much higher density.”
Professor Lee’s team is continuing to develop such a strain. “In the future, we would be delighted to see the production of chemicals from an engineered E. coli strain using CO₂ and formic acid as sole carbon sources,” he added.
-Profile:Distinguished Professor Sang Yup Leehttp://mbel.kaist.ac.krDepartment of Chemical and Biomolecular EngineeringKAIST
2020.09.29 View 12711 -
 Biomarker Predicts Who Will Have Severe COVID-19
- Airway cell analyses showing an activated immune axis could pinpoint the COVID-19 patients who will most benefit from targeted therapies.-
KAIST researchers have identified key markers that could help pinpoint patients who are bound to get a severe reaction to COVID-19 infection. This would help doctors provide the right treatments at the right time, potentially saving lives. The findings were published in the journal Frontiers in Immunology on August 28.
People’s immune systems react differently to infection with SARS-CoV-2, the virus that causes COVID-19, ranging from mild to severe, life-threatening responses.
To understand the differences in responses, Professor Heung Kyu Lee and PhD candidate Jang Hyun Park from the Graduate School of Medical Science and Engineering at KAIST analysed ribonucleic acid (RNA) sequencing data extracted from individual airway cells of healthy controls and of mildly and severely ill patients with COVID-19. The data was available in a public database previously published by a group of Chinese researchers.
“Our analyses identified an association between immune cells called neutrophils and special cell receptors that bind to the steroid hormone glucocorticoid,” Professor Lee explained. “This finding could be used as a biomarker for predicting disease severity in patients and thus selecting a targeted therapy that can help treat them at an appropriate time,” he added.
Severe illness in COVID-19 is associated with an exaggerated immune response that leads to excessive airway-damaging inflammation. This condition, known as acute respiratory distress syndrome (ARDS), accounts for 70% of deaths in fatal COVID-19 infections.
Scientists already know that this excessive inflammation involves heightened neutrophil recruitment to the airways, but the detailed mechanisms of this reaction are still unclear.
Lee and Park’s analyses found that a group of immune cells called myeloid cells produced excess amounts of neutrophil-recruiting chemicals in severely ill patients, including a cytokine called tumour necrosis factor (TNF) and a chemokine called CXCL8.
Further RNA analyses of neutrophils in severely ill patients showed they were less able to recruit very important T cells needed for attacking the virus. At the same time, the neutrophils produced too many extracellular molecules that normally trap pathogens, but damage airway cells when produced in excess.
The researchers additionally found that the airway cells in severely ill patients were not expressing enough glucocorticoid receptors. This was correlated with increased CXCL8 expression and neutrophil recruitment.
Glucocorticoids, like the well-known drug dexamethasone, are anti-inflammatory agents that could play a role in treating COVID-19. However, using them in early or mild forms of the infection could suppress the necessary immune reactions to combat the virus. But if airway damage has already happened in more severe cases, glucocorticoid treatment would be ineffective.
Knowing who to give this treatment to and when is really important. COVID-19 patients showing reduced glucocorticoid receptor expression, increased CXCL8 expression, and excess neutrophil recruitment to the airways could benefit from treatment with glucocorticoids to prevent airway damage. Further research is needed, however, to confirm the relationship between glucocorticoids and neutrophil inflammation at the protein level.
“Our study could serve as a springboard towards more accurate and reliable COVID-19 treatments,” Professor Lee said.
This work was supported by the National Research Foundation of Korea, and Mobile Clinic Module Project funded by KAIST.
Figure. Low glucocorticoid receptor (GR) expression led to excessive inflammation and lung damage by neutrophils through enhancing the expression of CXCL8 and other cytokines.
Image credit: Professor Heung Kyu Lee, KAIST. Created with Biorender.com.
Image usage restrictions: News organizations may use or redistribute these figures and image, with proper attribution, as part of news coverage of this paper only.
-Publication:
Jang Hyun Park, and Heung Kyu Lee. (2020). Re-analysis of Single Cell Transcriptome Reveals That the NR3C1-CXCL8-Neutrophil Axis Determines the Severity of COVID-19. Frontiers in Immunology, Available online at https://doi.org/10.3389/fimmu.2020.02145
-Profile: Heung Kyu Lee
Associate Professor
heungkyu.lee@kaist.ac.kr
https://www.heungkyulee.kaist.ac.kr/
Laboratory of Host Defenses
Graduate School of Medical Science and Engineering (GSMSE)
The Center for Epidemic Preparedness at KAIST Institute
http://kaist.ac.kr
Korea Advanced Institute of Science and Technology (KAIST)
Daejeon, Republic of Korea
Profile: Jang Hyun Park
PhD Candidate
janghyun.park@kaist.ac.kr
GSMSE, KAIST
2020.09.17 View 18411
Biomarker Predicts Who Will Have Severe COVID-19
- Airway cell analyses showing an activated immune axis could pinpoint the COVID-19 patients who will most benefit from targeted therapies.-
KAIST researchers have identified key markers that could help pinpoint patients who are bound to get a severe reaction to COVID-19 infection. This would help doctors provide the right treatments at the right time, potentially saving lives. The findings were published in the journal Frontiers in Immunology on August 28.
People’s immune systems react differently to infection with SARS-CoV-2, the virus that causes COVID-19, ranging from mild to severe, life-threatening responses.
To understand the differences in responses, Professor Heung Kyu Lee and PhD candidate Jang Hyun Park from the Graduate School of Medical Science and Engineering at KAIST analysed ribonucleic acid (RNA) sequencing data extracted from individual airway cells of healthy controls and of mildly and severely ill patients with COVID-19. The data was available in a public database previously published by a group of Chinese researchers.
“Our analyses identified an association between immune cells called neutrophils and special cell receptors that bind to the steroid hormone glucocorticoid,” Professor Lee explained. “This finding could be used as a biomarker for predicting disease severity in patients and thus selecting a targeted therapy that can help treat them at an appropriate time,” he added.
Severe illness in COVID-19 is associated with an exaggerated immune response that leads to excessive airway-damaging inflammation. This condition, known as acute respiratory distress syndrome (ARDS), accounts for 70% of deaths in fatal COVID-19 infections.
Scientists already know that this excessive inflammation involves heightened neutrophil recruitment to the airways, but the detailed mechanisms of this reaction are still unclear.
Lee and Park’s analyses found that a group of immune cells called myeloid cells produced excess amounts of neutrophil-recruiting chemicals in severely ill patients, including a cytokine called tumour necrosis factor (TNF) and a chemokine called CXCL8.
Further RNA analyses of neutrophils in severely ill patients showed they were less able to recruit very important T cells needed for attacking the virus. At the same time, the neutrophils produced too many extracellular molecules that normally trap pathogens, but damage airway cells when produced in excess.
The researchers additionally found that the airway cells in severely ill patients were not expressing enough glucocorticoid receptors. This was correlated with increased CXCL8 expression and neutrophil recruitment.
Glucocorticoids, like the well-known drug dexamethasone, are anti-inflammatory agents that could play a role in treating COVID-19. However, using them in early or mild forms of the infection could suppress the necessary immune reactions to combat the virus. But if airway damage has already happened in more severe cases, glucocorticoid treatment would be ineffective.
Knowing who to give this treatment to and when is really important. COVID-19 patients showing reduced glucocorticoid receptor expression, increased CXCL8 expression, and excess neutrophil recruitment to the airways could benefit from treatment with glucocorticoids to prevent airway damage. Further research is needed, however, to confirm the relationship between glucocorticoids and neutrophil inflammation at the protein level.
“Our study could serve as a springboard towards more accurate and reliable COVID-19 treatments,” Professor Lee said.
This work was supported by the National Research Foundation of Korea, and Mobile Clinic Module Project funded by KAIST.
Figure. Low glucocorticoid receptor (GR) expression led to excessive inflammation and lung damage by neutrophils through enhancing the expression of CXCL8 and other cytokines.
Image credit: Professor Heung Kyu Lee, KAIST. Created with Biorender.com.
Image usage restrictions: News organizations may use or redistribute these figures and image, with proper attribution, as part of news coverage of this paper only.
-Publication:
Jang Hyun Park, and Heung Kyu Lee. (2020). Re-analysis of Single Cell Transcriptome Reveals That the NR3C1-CXCL8-Neutrophil Axis Determines the Severity of COVID-19. Frontiers in Immunology, Available online at https://doi.org/10.3389/fimmu.2020.02145
-Profile: Heung Kyu Lee
Associate Professor
heungkyu.lee@kaist.ac.kr
https://www.heungkyulee.kaist.ac.kr/
Laboratory of Host Defenses
Graduate School of Medical Science and Engineering (GSMSE)
The Center for Epidemic Preparedness at KAIST Institute
http://kaist.ac.kr
Korea Advanced Institute of Science and Technology (KAIST)
Daejeon, Republic of Korea
Profile: Jang Hyun Park
PhD Candidate
janghyun.park@kaist.ac.kr
GSMSE, KAIST
2020.09.17 View 18411 -
 Before Eyes Open, They Get Ready to See
- Spontaneous retinal waves can generate long-range horizontal connectivity in visual cortex. -
A KAIST research team’s computational simulations demonstrated that the waves of spontaneous neural activity in the retinas of still-closed eyes in mammals develop long-range horizontal connections in the visual cortex during early developmental stages.
This new finding featured in the August 19 edition of Journal of Neuroscience as a cover article has resolved a long-standing puzzle for understanding visual neuroscience regarding the early organization of functional architectures in the mammalian visual cortex before eye-opening, especially the long-range horizontal connectivity known as “feature-specific” circuitry.
To prepare the animal to see when its eyes open, neural circuits in the brain’s visual system must begin developing earlier. However, the proper development of many brain regions involved in vision generally requires sensory input through the eyes.
In the primary visual cortex of the higher mammalian taxa, cortical neurons of similar functional tuning to a visual feature are linked together by long-range horizontal circuits that play a crucial role in visual information processing.
Surprisingly, these long-range horizontal connections in the primary visual cortex of higher mammals emerge before the onset of sensory experience, and the mechanism underlying this phenomenon has remained elusive.
To investigate this mechanism, a group of researchers led by Professor Se-Bum Paik from the Department of Bio and Brain Engineering at KAIST implemented computational simulations of early visual pathways using data obtained from the retinal circuits in young animals before eye-opening, including cats, monkeys, and mice.
From these simulations, the researchers found that spontaneous waves propagating in ON and OFF retinal mosaics can initialize the wiring of long-range horizontal connections by selectively co-activating cortical neurons of similar functional tuning, whereas equivalent random activities cannot induce such organizations.
The simulations also showed that emerged long-range horizontal connections can induce the patterned cortical activities, matching the topography of underlying functional maps even in salt-and-pepper type organizations observed in rodents. This result implies that the model developed by Professor Paik and his group can provide a universal principle for the developmental mechanism of long-range horizontal connections in both higher mammals as well as rodents.
Professor Paik said, “Our model provides a deeper understanding of how the functional architectures in the visual cortex can originate from the spatial organization of the periphery, without sensory experience during early developmental periods.”
He continued, “We believe that our findings will be of great interest to scientists working in a wide range of fields such as neuroscience, vision science, and developmental biology.”
This work was supported by the National Research Foundation of Korea (NRF). Undergraduate student Jinwoo Kim participated in this research project and presented the findings as the lead author as part of the Undergraduate Research Participation (URP) Program at KAIST.
Figures and image credit: Professor Se-Bum Paik, KAIST
Image usage restrictions: News organizations may use or redistribute these figures and image, with proper attribution, as part of news coverage of this paper only.
Publication:
Jinwoo Kim, Min Song, and Se-Bum Paik. (2020). Spontaneous retinal waves generate long-range horizontal connectivity in visual cortex. Journal of Neuroscience, Available online athttps://www.jneurosci.org/content/early/2020/07/17/JNEUROSCI.0649-20.2020
Profile: Se-Bum Paik
Assistant Professor
sbpaik@kaist.ac.kr
http://vs.kaist.ac.kr/
VSNN Laboratory
Department of Bio and Brain Engineering
Program of Brain and Cognitive Engineering
http://kaist.ac.kr
Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea
Profile: Jinwoo Kim
Undergraduate Student
bugkjw@kaist.ac.kr
Department of Bio and Brain Engineering, KAIST
Profile: Min Song
Ph.D. Candidate
night@kaist.ac.kr
Program of Brain and Cognitive Engineering, KAIST
(END)
2020.08.25 View 14828
Before Eyes Open, They Get Ready to See
- Spontaneous retinal waves can generate long-range horizontal connectivity in visual cortex. -
A KAIST research team’s computational simulations demonstrated that the waves of spontaneous neural activity in the retinas of still-closed eyes in mammals develop long-range horizontal connections in the visual cortex during early developmental stages.
This new finding featured in the August 19 edition of Journal of Neuroscience as a cover article has resolved a long-standing puzzle for understanding visual neuroscience regarding the early organization of functional architectures in the mammalian visual cortex before eye-opening, especially the long-range horizontal connectivity known as “feature-specific” circuitry.
To prepare the animal to see when its eyes open, neural circuits in the brain’s visual system must begin developing earlier. However, the proper development of many brain regions involved in vision generally requires sensory input through the eyes.
In the primary visual cortex of the higher mammalian taxa, cortical neurons of similar functional tuning to a visual feature are linked together by long-range horizontal circuits that play a crucial role in visual information processing.
Surprisingly, these long-range horizontal connections in the primary visual cortex of higher mammals emerge before the onset of sensory experience, and the mechanism underlying this phenomenon has remained elusive.
To investigate this mechanism, a group of researchers led by Professor Se-Bum Paik from the Department of Bio and Brain Engineering at KAIST implemented computational simulations of early visual pathways using data obtained from the retinal circuits in young animals before eye-opening, including cats, monkeys, and mice.
From these simulations, the researchers found that spontaneous waves propagating in ON and OFF retinal mosaics can initialize the wiring of long-range horizontal connections by selectively co-activating cortical neurons of similar functional tuning, whereas equivalent random activities cannot induce such organizations.
The simulations also showed that emerged long-range horizontal connections can induce the patterned cortical activities, matching the topography of underlying functional maps even in salt-and-pepper type organizations observed in rodents. This result implies that the model developed by Professor Paik and his group can provide a universal principle for the developmental mechanism of long-range horizontal connections in both higher mammals as well as rodents.
Professor Paik said, “Our model provides a deeper understanding of how the functional architectures in the visual cortex can originate from the spatial organization of the periphery, without sensory experience during early developmental periods.”
He continued, “We believe that our findings will be of great interest to scientists working in a wide range of fields such as neuroscience, vision science, and developmental biology.”
This work was supported by the National Research Foundation of Korea (NRF). Undergraduate student Jinwoo Kim participated in this research project and presented the findings as the lead author as part of the Undergraduate Research Participation (URP) Program at KAIST.
Figures and image credit: Professor Se-Bum Paik, KAIST
Image usage restrictions: News organizations may use or redistribute these figures and image, with proper attribution, as part of news coverage of this paper only.
Publication:
Jinwoo Kim, Min Song, and Se-Bum Paik. (2020). Spontaneous retinal waves generate long-range horizontal connectivity in visual cortex. Journal of Neuroscience, Available online athttps://www.jneurosci.org/content/early/2020/07/17/JNEUROSCI.0649-20.2020
Profile: Se-Bum Paik
Assistant Professor
sbpaik@kaist.ac.kr
http://vs.kaist.ac.kr/
VSNN Laboratory
Department of Bio and Brain Engineering
Program of Brain and Cognitive Engineering
http://kaist.ac.kr
Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea
Profile: Jinwoo Kim
Undergraduate Student
bugkjw@kaist.ac.kr
Department of Bio and Brain Engineering, KAIST
Profile: Min Song
Ph.D. Candidate
night@kaist.ac.kr
Program of Brain and Cognitive Engineering, KAIST
(END)
2020.08.25 View 14828 -
 COVID-19 Update: Fall Semester to Continue Offering Classes Online
KAIST announced that the university would continue online classes through the fall semester. However, the university will conduct additional in-person classes for upper-level undergraduate lab classes and some graduate courses where on-site interaction was deemed to be highly necessary. Some 600-level graduate courses at the Daejeon campus and graduate courses at the Seoul campus will carry out both in-person and online classes. The fall semester will start from August 31.
Provost and Executive Vice President Kwang Hyung Lee announced the fall semester plan in his letter to the entire student body on July 9. He said that the university decided to continue with online classes in consideration of the safety of KAIST community members and the current status of the COVID-19 spread. However, he said the new plan will help students choose class options between in-person and online classes.
“Although the number of classes with two versions is limited, we believe this will help many students continue learning without the sustained face-to-face contact that is inherent in residential education,” Provost Lee said.
In-person classes conducted in the fall semester will also be provided online for students who are not available for in-person classes. Students may choose the type of the classes they prefer according to their situation, among only the courses that will offer two versions. Professors will decide if they will conduct two versions of their classes. The Office of Academic Affairs is collecting the professors’ applications for conducting both versions until July 24.
KAIST offered real-time online classes and pre-recorded KLMS (KAIST Learning Management System) classes during the spring semester with a very limited number of in-person lab classes for graduate courses and these two versions of online class will continue for fall semester.
Provost Lee asked the students who will take the in-person classes to strictly observe all precaution measures as the university will do its best to abide by the government guidelines against the Covid-19 in preparation for the fall semester.
“We will continue to make appropriate and safe accommodations for them,” said Provost Lee.
Those who need to reside in on-campus dormitories are required to be approved for moving. The applications will open after all the in-person class schedules are fixed next month. However, students who were approved for staying in the dormitories last semester can move in without additional approval procedures for the fall semester.
(END)
2020.07.10 View 9817
COVID-19 Update: Fall Semester to Continue Offering Classes Online
KAIST announced that the university would continue online classes through the fall semester. However, the university will conduct additional in-person classes for upper-level undergraduate lab classes and some graduate courses where on-site interaction was deemed to be highly necessary. Some 600-level graduate courses at the Daejeon campus and graduate courses at the Seoul campus will carry out both in-person and online classes. The fall semester will start from August 31.
Provost and Executive Vice President Kwang Hyung Lee announced the fall semester plan in his letter to the entire student body on July 9. He said that the university decided to continue with online classes in consideration of the safety of KAIST community members and the current status of the COVID-19 spread. However, he said the new plan will help students choose class options between in-person and online classes.
“Although the number of classes with two versions is limited, we believe this will help many students continue learning without the sustained face-to-face contact that is inherent in residential education,” Provost Lee said.
In-person classes conducted in the fall semester will also be provided online for students who are not available for in-person classes. Students may choose the type of the classes they prefer according to their situation, among only the courses that will offer two versions. Professors will decide if they will conduct two versions of their classes. The Office of Academic Affairs is collecting the professors’ applications for conducting both versions until July 24.
KAIST offered real-time online classes and pre-recorded KLMS (KAIST Learning Management System) classes during the spring semester with a very limited number of in-person lab classes for graduate courses and these two versions of online class will continue for fall semester.
Provost Lee asked the students who will take the in-person classes to strictly observe all precaution measures as the university will do its best to abide by the government guidelines against the Covid-19 in preparation for the fall semester.
“We will continue to make appropriate and safe accommodations for them,” said Provost Lee.
Those who need to reside in on-campus dormitories are required to be approved for moving. The applications will open after all the in-person class schedules are fixed next month. However, students who were approved for staying in the dormitories last semester can move in without additional approval procedures for the fall semester.
(END)
2020.07.10 View 9817 -
 Professor J.H. Lee Wins the Innovators in Science Award
Professor Jeong Ho Lee from the Graduate School of Medical Science and Engineering won the Early-Career Scientist Award of the 2020 Innovators in Science Award. The New York Academy of Sciences administers the award in partnership with Takeda Pharmaceutical Company.
The Innovators in Science Award grants two prizes of US $200,000 each year: one to an Early-Career Scientist and the other to a well-established Senior Scientist who have distinguished themselves for the creative thinking and impact of their rare disease research. The Senior Scientist Awardee is Dr. Adrian R. Krainer, at Cold Spring Harbor Laboratory whose research focused on the mechanisms and control of RNA splicing.
Prof. Lee is recognized for his research investigating genetic mutations in stem cells in the brain that result in rare developmental brain disorders. He was the first to identify the causes of intractable epilepsies and has identified the genes responsible for several developmental brain disorders, including focal cortical dysplasia, Joubert syndrome—a disorder characterized by an underdevelopment of the brainstem—and hemimegaloencephaly, which is the abnormal enlargement of one side of the brain.
“It is a great honor to be recognized by a jury of such globally respected scientists whom I greatly admire,” said Prof. Lee. “More importantly, this award validates research into brain somatic mutations as an important area of exploration to help patients suffering from devastating and untreatable neurological disorders.”
Prof. Lee also is the Director of the National Creative Research Initiative Center for Brain Somatic Mutations, and Co-founder and Chief Technology Officer of SoVarGen, a biopharmaceutical company aiming to discover novel therapeutics and diagnosis for intractable central nervous system (CNS) diseases caused by low-level somatic mutation.
The Innovators in Science Award is a limited submission competition in which research universities, academic institutions, government or non-profit institutions, or equivalent from around the globe with a well-established record of scientific excellence are invited to nominate their most promising Early-Career Scientists and their most outstanding Senior Scientists working in one of four selected therapeutic fields of neuroscience, gastroenterology, oncology, and regenerative medicine. The 2020 Winners will be honored at the virtual Innovators in Science Award Ceremony and Symposium in October 2020.
2020.07.09 View 11243
Professor J.H. Lee Wins the Innovators in Science Award
Professor Jeong Ho Lee from the Graduate School of Medical Science and Engineering won the Early-Career Scientist Award of the 2020 Innovators in Science Award. The New York Academy of Sciences administers the award in partnership with Takeda Pharmaceutical Company.
The Innovators in Science Award grants two prizes of US $200,000 each year: one to an Early-Career Scientist and the other to a well-established Senior Scientist who have distinguished themselves for the creative thinking and impact of their rare disease research. The Senior Scientist Awardee is Dr. Adrian R. Krainer, at Cold Spring Harbor Laboratory whose research focused on the mechanisms and control of RNA splicing.
Prof. Lee is recognized for his research investigating genetic mutations in stem cells in the brain that result in rare developmental brain disorders. He was the first to identify the causes of intractable epilepsies and has identified the genes responsible for several developmental brain disorders, including focal cortical dysplasia, Joubert syndrome—a disorder characterized by an underdevelopment of the brainstem—and hemimegaloencephaly, which is the abnormal enlargement of one side of the brain.
“It is a great honor to be recognized by a jury of such globally respected scientists whom I greatly admire,” said Prof. Lee. “More importantly, this award validates research into brain somatic mutations as an important area of exploration to help patients suffering from devastating and untreatable neurological disorders.”
Prof. Lee also is the Director of the National Creative Research Initiative Center for Brain Somatic Mutations, and Co-founder and Chief Technology Officer of SoVarGen, a biopharmaceutical company aiming to discover novel therapeutics and diagnosis for intractable central nervous system (CNS) diseases caused by low-level somatic mutation.
The Innovators in Science Award is a limited submission competition in which research universities, academic institutions, government or non-profit institutions, or equivalent from around the globe with a well-established record of scientific excellence are invited to nominate their most promising Early-Career Scientists and their most outstanding Senior Scientists working in one of four selected therapeutic fields of neuroscience, gastroenterology, oncology, and regenerative medicine. The 2020 Winners will be honored at the virtual Innovators in Science Award Ceremony and Symposium in October 2020.
2020.07.09 View 11243 -
 Antivirus Industry the Centerpiece of New Deal R&D Initiatives
- KAIST launches post-COVID-19 R&D initiatives for smart mobile medical systems. -
KAIST will make the antivirus industry the centerpiece of what it is touting as the KAIST New Deal R&D initiative, which will drive new growth engines for preparing for the post-coronavirus era.
According to the new initiative, KAIST will concentrate on creating antivirus technologies, infectious disease-related big data management, and non-contact services platforms as key future R&D projects.
President Sung-Chul Shin launched the COVID-19 R&D Initiative task force last month, composed of more than 50 professors from the Graduate School of Medical Science and Engineering, the Department of Biological Sciences, the College of Engineering, and the Department of Industrial Design. The task force came up with key research agendas that will promote smart mobile medical systems in the years ahead.
“We will devote all of our R&D capacities to pursue a smart healthcare society,” said President Shin. “Our competitiveness in the fields of AI, ICT, materials, and bio-technology holds significant potential for building a healthy society powered by smart medical systems in Korea,” he added.
The smart medical systems focus mainly on building an Epidemic Mitigating Mobile Module (EMMM). The EMMM will manage epidemics via the three phases of prevention, emergency response, and treatment, with the development of each phase’s technological modules. The EMMM will also build an AI big data platform to assist with clinical applications and epidemic management.
Technologies applicable for the prevention phase include developing recyclable antivirus masks, plasma virus sterilizers, and smart breathable protective gowns. KAIST researchers will also focus on developing diagnosis modules that will identify epidemics more quickly and accurately.
Most significantly, KAIST aims to develop technologies for anti-infection medical services such as the transformable negative pressure ambulance module and negative pressure room, which are specially developed for respiratory infections.
The new R&D initiatives will center on virus therapies and treatments, specifically pushing forward vaccine and robotics studies. As caring robots and delivery robots will become common as main caregivers via noncontact services, research focusing on robotics will be significantly enhanced.
Even before launching the new R&D initiatives, researchers have started to present new technologies to help address the pandemic. Professor Il-Doo Kim’s team in the Department of Materials Science and Engineering developed a washable nano-fiber filtered face mask that is preparing for commercialization.
GPS tracking of infections has expanded comprehensively to detect both indoor and outdoor activities of infected patients. Professor Dong-Soo Han from the School of Computing developed Wi-Fi positioning software built into mobile phones that can trace both activities and is now preparing to roll it out.
Virologist Ui-Cheol Shin from the Graduate School of Medical Science and Engineering is carrying out research on a universal T-cell vaccine that can block the Betacoronaviruses. It is reported that that new epidemics such as SARS, MERS, and COVID-19 carry Betacoronaviruses.
Research teams in the Graduate School of AI are conducting various research projects on building prediction models for outbreaks and spreads using big data.
(END)
2020.05.20 View 14245
Antivirus Industry the Centerpiece of New Deal R&D Initiatives
- KAIST launches post-COVID-19 R&D initiatives for smart mobile medical systems. -
KAIST will make the antivirus industry the centerpiece of what it is touting as the KAIST New Deal R&D initiative, which will drive new growth engines for preparing for the post-coronavirus era.
According to the new initiative, KAIST will concentrate on creating antivirus technologies, infectious disease-related big data management, and non-contact services platforms as key future R&D projects.
President Sung-Chul Shin launched the COVID-19 R&D Initiative task force last month, composed of more than 50 professors from the Graduate School of Medical Science and Engineering, the Department of Biological Sciences, the College of Engineering, and the Department of Industrial Design. The task force came up with key research agendas that will promote smart mobile medical systems in the years ahead.
“We will devote all of our R&D capacities to pursue a smart healthcare society,” said President Shin. “Our competitiveness in the fields of AI, ICT, materials, and bio-technology holds significant potential for building a healthy society powered by smart medical systems in Korea,” he added.
The smart medical systems focus mainly on building an Epidemic Mitigating Mobile Module (EMMM). The EMMM will manage epidemics via the three phases of prevention, emergency response, and treatment, with the development of each phase’s technological modules. The EMMM will also build an AI big data platform to assist with clinical applications and epidemic management.
Technologies applicable for the prevention phase include developing recyclable antivirus masks, plasma virus sterilizers, and smart breathable protective gowns. KAIST researchers will also focus on developing diagnosis modules that will identify epidemics more quickly and accurately.
Most significantly, KAIST aims to develop technologies for anti-infection medical services such as the transformable negative pressure ambulance module and negative pressure room, which are specially developed for respiratory infections.
The new R&D initiatives will center on virus therapies and treatments, specifically pushing forward vaccine and robotics studies. As caring robots and delivery robots will become common as main caregivers via noncontact services, research focusing on robotics will be significantly enhanced.
Even before launching the new R&D initiatives, researchers have started to present new technologies to help address the pandemic. Professor Il-Doo Kim’s team in the Department of Materials Science and Engineering developed a washable nano-fiber filtered face mask that is preparing for commercialization.
GPS tracking of infections has expanded comprehensively to detect both indoor and outdoor activities of infected patients. Professor Dong-Soo Han from the School of Computing developed Wi-Fi positioning software built into mobile phones that can trace both activities and is now preparing to roll it out.
Virologist Ui-Cheol Shin from the Graduate School of Medical Science and Engineering is carrying out research on a universal T-cell vaccine that can block the Betacoronaviruses. It is reported that that new epidemics such as SARS, MERS, and COVID-19 carry Betacoronaviruses.
Research teams in the Graduate School of AI are conducting various research projects on building prediction models for outbreaks and spreads using big data.
(END)
2020.05.20 View 14245 -
 Researchers Present a Microbial Strain Capable of Massive Succinic Acid Production
A research team led by Distinguished Professor Sang Yup Lee reported the production of a microbial strain capable of the massive production of succinic acid with the highest production efficiency to date. This strategy of integrating systems metabolic engineering with enzyme engineering will be useful for the production of industrially competitive bio-based chemicals. Their strategy was described in Nature Communications on April 23.
The bio-based production of industrial chemicals from renewable non-food biomass has become increasingly important as a sustainable substitute for conventional petroleum-based production processes relying on fossil resources. Here, systems metabolic engineering, which is the key component for biorefinery technology, is utilized to effectively engineer the complex metabolic pathways of microorganisms to enable the efficient production of industrial chemicals.
Succinic acid, a four-carbon dicarboxylic acid, is one of the most promising platform chemicals serving as a precursor for industrially important chemicals. Among microorganisms producing succinic acid, Mannheimia succiniciproducens has been proven to be one of the best strains for succinic acid production.
The research team has developed a bio-based succinic acid production technology using the M. succiniciproducens strain isolated from the rumen of Korean cow for over 20 years and succeeded in developing a strain capable of producing succinic acid with the highest production efficiency.
They carried out systems metabolic engineering to optimize the succinic acid production pathway of the M. succiniciproducens strain by determining the crystal structure of key enzymes important for succinic acid production and performing protein engineering to develop enzymes with better catalytic performance.
As a result, 134 g per liter of succinic acid was produced from the fermentation of an engineered strain using glucose, glycerol, and carbon dioxide. They were able to achieve 21 g per liter per hour of succinic acid production, which is one of the key factors determining the economic feasibility of the overall production process. This is the world’s best succinic acid production efficiency reported to date. Previous production methods averaged 1~3 g per liter per hour.
Distinguished professor Sang Yup Lee explained that his team’s work will significantly contribute to transforming the current petrochemical-based industry into an eco-friendly bio-based one.
“Our research on the highly efficient bio-based production of succinic acid from renewable non-food resources and carbon dioxide has provided a basis for reducing our strong dependence on fossil resources, which is the main cause of the environmental crisis,” Professor Lee said.
This work was supported by the Technology Development Program to Solve Climate Changes via Systems Metabolic Engineering for Biorefineries and the C1 Gas Refinery Program from the Ministry of Science and ICT through the National Research Foundation of Korea.
2020.05.06 View 10939
Researchers Present a Microbial Strain Capable of Massive Succinic Acid Production
A research team led by Distinguished Professor Sang Yup Lee reported the production of a microbial strain capable of the massive production of succinic acid with the highest production efficiency to date. This strategy of integrating systems metabolic engineering with enzyme engineering will be useful for the production of industrially competitive bio-based chemicals. Their strategy was described in Nature Communications on April 23.
The bio-based production of industrial chemicals from renewable non-food biomass has become increasingly important as a sustainable substitute for conventional petroleum-based production processes relying on fossil resources. Here, systems metabolic engineering, which is the key component for biorefinery technology, is utilized to effectively engineer the complex metabolic pathways of microorganisms to enable the efficient production of industrial chemicals.
Succinic acid, a four-carbon dicarboxylic acid, is one of the most promising platform chemicals serving as a precursor for industrially important chemicals. Among microorganisms producing succinic acid, Mannheimia succiniciproducens has been proven to be one of the best strains for succinic acid production.
The research team has developed a bio-based succinic acid production technology using the M. succiniciproducens strain isolated from the rumen of Korean cow for over 20 years and succeeded in developing a strain capable of producing succinic acid with the highest production efficiency.
They carried out systems metabolic engineering to optimize the succinic acid production pathway of the M. succiniciproducens strain by determining the crystal structure of key enzymes important for succinic acid production and performing protein engineering to develop enzymes with better catalytic performance.
As a result, 134 g per liter of succinic acid was produced from the fermentation of an engineered strain using glucose, glycerol, and carbon dioxide. They were able to achieve 21 g per liter per hour of succinic acid production, which is one of the key factors determining the economic feasibility of the overall production process. This is the world’s best succinic acid production efficiency reported to date. Previous production methods averaged 1~3 g per liter per hour.
Distinguished professor Sang Yup Lee explained that his team’s work will significantly contribute to transforming the current petrochemical-based industry into an eco-friendly bio-based one.
“Our research on the highly efficient bio-based production of succinic acid from renewable non-food resources and carbon dioxide has provided a basis for reducing our strong dependence on fossil resources, which is the main cause of the environmental crisis,” Professor Lee said.
This work was supported by the Technology Development Program to Solve Climate Changes via Systems Metabolic Engineering for Biorefineries and the C1 Gas Refinery Program from the Ministry of Science and ICT through the National Research Foundation of Korea.
2020.05.06 View 10939 -
 COVID-19 Update: Students and Professors Adjust to 1,200 Online Classes
- Approximately 1,200 online classes are being offered during the cyber semester. -
COVID-19 is transforming the way KAISTians live. Many restrictions imposed to contain the spread of the virus have us adjusting to a new environment swiftly. A cyber MOU signing ceremony with a foreign partner university took place on March 25, as did a cyber Board of Trustees Meeting on March 26. KAIST’s Main Campus is normally one of the most iconic picnic destinations for the citizens of Daejeon, but this is not the case this spring, as the campus has been temporarily closed to protect our own community as well as our neighboring communities.
KAIST has been offering approximately 1,200 courses remotely since this semester opened on March 16 and will do so until further notice. Students and faculty members are experiencing the newly emerging norms of remote education in this time of social distancing. This unexpected disruption might advance the new digital pedagogy at KAIST, which was already ahead of the curve with its online learning and teaching infrastructure.
Professor Youngsun Kwon, the Dean of KAIST Academy and the Director of the Center for Excellence in Learning and Teaching, said, “We had already initiated the KAIST Learning Management System (KLMS) in 2011 for introducing flipped learning, a student-centric creative-learning pedagogy. Since then, about nine percent of all our classes have been run using this methodology. Students pre-study the online streaming lecture materials that professors have uploaded in advance outside the classroom, and in-class activities are mainly group discussions and problem-solving activities.”
According to Dean Kwon, the university was planning to further introduce real-time online education from this spring semester and were in the process of setting up the system started from last year. “Our plan was to connect the real-time video conferencing service Zoom to our existing remote educational platform KLMS. However, things related to COVID-19 all happened so rapidly that we didn’t yet have a full-fledged connection,” said Dean Kwon.
Professors had to choose either to conduct their lectures remotely in the form of a pre-made one-way lesson or a real-time two-way lesson. They could also modify them using both platforms. Professor Youngchul Kim from the Department of Civil and Environmental Engineering said, “I had to also make some changes in my class activities and assignments. I removed a group design project and some tutorial workshops that were meant to provide students with hands-on experience using design tools such a 3D printer and a laser cutting system. Ironically, I found that students seem to focus on online lectures more intensely than I expected. I feel like students give me their thoughts and respond much quicker as well.”
Unfortunately, the online learning and teaching infrastructure and resources that had been put in place could not handle the overwhelming volume of classes being uploaded over very short period of time.
To handle the new demand, IT technicians are setting up the technical environment with stable servers to improve network traffic. For professors, teaching assistants, and students to teach and learn better in an online space, department offices have been lending spare equipment such as laptops, tablets, headsets, and webcams to those who do not have their own, based on availability. Academic support staff have also been pitching in by developing the best guidelines for online training.
“Even in these uncharted waters, all of the members of KAIST are doing their best to keep the ship steadily sailing in the right direction. I am very grateful for everyone’s efforts to make things work,” said Dean Kwon.
About 60% of the courses currently offered online are being uploaded using the non-real-time KLMS, and the remaining 40% are run in real time via Zoom. Each class runs for 50 minutes per academic credit, and comprises at least 25 minutes of lecture, a Q&A session, and a group discussion.
Students enrolled in the 481 courses that include experiments are asked to conduct their experiments individually after watching a 50-minute online lecture. Experimental, practical, and physical courses that are impossible to provide online have been cancelled or postponed until the next semester or summer/winter breaks.
“I find the online lessons quite convenient for the courses that I am taking this semester, especially the non-real-time ones, because I can watch the lecture videos over and over again even after the class has finished to understand the contents better,” said Jaymee Palma, an undergraduate student from the Department of Chemistry.
Ada Carpenter, an undergraduate student from the Department of Physics, added, “Students who normally feel uncomfortable speaking in class raise their questions on an online Q&A board more easily. Besides, I saw many other students asking questions and leading a discussion verbally as well. I think, when students join a synchronous Zoom classroom, they are more engaged than when just attending a regular lecture in a conventional classroom. It’s like everyone can sit in the front row of the class.”
Still, there are reportedly pedagogical, logistical, and technological challenges to these extraordinary educational measures. Some students express concerns about keeping up with professors and other students if they don’t have sufficient technological knowledge and skills. Some also cite the disadvantage of online classes having much less interaction and engagement among students and between professors and students than offline ones. “Fortunately, I think my professors are all excellent, so I can immerse myself well during all my cyber classes,” said Sang-Hyeon Lee, a graduate student from the School of Computing.
(END)
2020.03.26 View 10500
COVID-19 Update: Students and Professors Adjust to 1,200 Online Classes
- Approximately 1,200 online classes are being offered during the cyber semester. -
COVID-19 is transforming the way KAISTians live. Many restrictions imposed to contain the spread of the virus have us adjusting to a new environment swiftly. A cyber MOU signing ceremony with a foreign partner university took place on March 25, as did a cyber Board of Trustees Meeting on March 26. KAIST’s Main Campus is normally one of the most iconic picnic destinations for the citizens of Daejeon, but this is not the case this spring, as the campus has been temporarily closed to protect our own community as well as our neighboring communities.
KAIST has been offering approximately 1,200 courses remotely since this semester opened on March 16 and will do so until further notice. Students and faculty members are experiencing the newly emerging norms of remote education in this time of social distancing. This unexpected disruption might advance the new digital pedagogy at KAIST, which was already ahead of the curve with its online learning and teaching infrastructure.
Professor Youngsun Kwon, the Dean of KAIST Academy and the Director of the Center for Excellence in Learning and Teaching, said, “We had already initiated the KAIST Learning Management System (KLMS) in 2011 for introducing flipped learning, a student-centric creative-learning pedagogy. Since then, about nine percent of all our classes have been run using this methodology. Students pre-study the online streaming lecture materials that professors have uploaded in advance outside the classroom, and in-class activities are mainly group discussions and problem-solving activities.”
According to Dean Kwon, the university was planning to further introduce real-time online education from this spring semester and were in the process of setting up the system started from last year. “Our plan was to connect the real-time video conferencing service Zoom to our existing remote educational platform KLMS. However, things related to COVID-19 all happened so rapidly that we didn’t yet have a full-fledged connection,” said Dean Kwon.
Professors had to choose either to conduct their lectures remotely in the form of a pre-made one-way lesson or a real-time two-way lesson. They could also modify them using both platforms. Professor Youngchul Kim from the Department of Civil and Environmental Engineering said, “I had to also make some changes in my class activities and assignments. I removed a group design project and some tutorial workshops that were meant to provide students with hands-on experience using design tools such a 3D printer and a laser cutting system. Ironically, I found that students seem to focus on online lectures more intensely than I expected. I feel like students give me their thoughts and respond much quicker as well.”
Unfortunately, the online learning and teaching infrastructure and resources that had been put in place could not handle the overwhelming volume of classes being uploaded over very short period of time.
To handle the new demand, IT technicians are setting up the technical environment with stable servers to improve network traffic. For professors, teaching assistants, and students to teach and learn better in an online space, department offices have been lending spare equipment such as laptops, tablets, headsets, and webcams to those who do not have their own, based on availability. Academic support staff have also been pitching in by developing the best guidelines for online training.
“Even in these uncharted waters, all of the members of KAIST are doing their best to keep the ship steadily sailing in the right direction. I am very grateful for everyone’s efforts to make things work,” said Dean Kwon.
About 60% of the courses currently offered online are being uploaded using the non-real-time KLMS, and the remaining 40% are run in real time via Zoom. Each class runs for 50 minutes per academic credit, and comprises at least 25 minutes of lecture, a Q&A session, and a group discussion.
Students enrolled in the 481 courses that include experiments are asked to conduct their experiments individually after watching a 50-minute online lecture. Experimental, practical, and physical courses that are impossible to provide online have been cancelled or postponed until the next semester or summer/winter breaks.
“I find the online lessons quite convenient for the courses that I am taking this semester, especially the non-real-time ones, because I can watch the lecture videos over and over again even after the class has finished to understand the contents better,” said Jaymee Palma, an undergraduate student from the Department of Chemistry.
Ada Carpenter, an undergraduate student from the Department of Physics, added, “Students who normally feel uncomfortable speaking in class raise their questions on an online Q&A board more easily. Besides, I saw many other students asking questions and leading a discussion verbally as well. I think, when students join a synchronous Zoom classroom, they are more engaged than when just attending a regular lecture in a conventional classroom. It’s like everyone can sit in the front row of the class.”
Still, there are reportedly pedagogical, logistical, and technological challenges to these extraordinary educational measures. Some students express concerns about keeping up with professors and other students if they don’t have sufficient technological knowledge and skills. Some also cite the disadvantage of online classes having much less interaction and engagement among students and between professors and students than offline ones. “Fortunately, I think my professors are all excellent, so I can immerse myself well during all my cyber classes,” said Sang-Hyeon Lee, a graduate student from the School of Computing.
(END)
2020.03.26 View 10500 -
 Ultrathin but Fully Packaged High-Resolution Camera
- Biologically inspired ultrathin arrayed camera captures super-resolution images. -
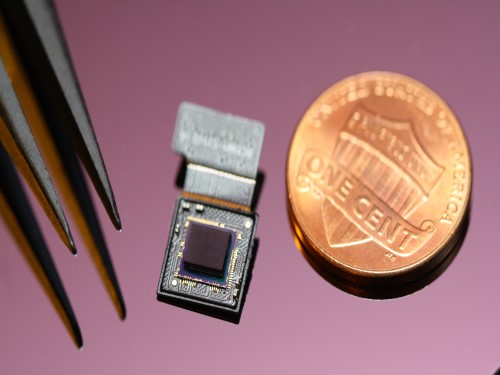
The unique structures of biological vision systems in nature inspired scientists to design ultracompact imaging systems. A research group led by Professor Ki-Hun Jeong have made an ultracompact camera that captures high-contrast and high-resolution images. Fully packaged with micro-optical elements such as inverted micro-lenses, multilayered pinhole arrays, and gap spacers on the image sensor, the camera boasts a total track length of 740 μm and a field of view of 73°.
Inspired by the eye structures of the paper wasp species Xenos peckii, the research team completely suppressed optical noise between micro-lenses while reducing camera thickness. The camera has successfully demonstrated high-contrast clear array images acquired from tiny micro lenses. To further enhance the image quality of the captured image, the team combined the arrayed images into one image through super-resolution imaging.
An insect’s compound eye has superior visual characteristics, such as a wide viewing angle, high motion sensitivity, and a large depth of field while maintaining a small volume of visual structure with a small focal length. Among them, the eyes of Xenos peckii and an endoparasite found on paper wasps have hundreds of photoreceptors in a single lens unlike conventional compound eyes. In particular, the eye structures of an adult Xenos peckii exhibit hundreds of photoreceptors on an individual eyelet and offer engineering inspiration for ultrathin cameras or imaging applications because they have higher visual acuity than other compound eyes.
For instance, Xenos peckii’s eye-inspired cameras provide a 50 times higher spatial resolution than those based on arthropod eyes. In addition, the effective image resolution of the Xenos peckii’s eye can be further improved using the image overlaps between neighboring eyelets. This unique structure offers higher visual resolution than other insect eyes.
The team achieved high-contrast and super-resolution imaging through a novel arrayed design of micro-optical elements comprising multilayered aperture arrays and inverted micro-lens arrays directly stacked over an image sensor. This optical component was integrated with a complementary metal oxide semiconductor image sensor.
This is first demonstration of super-resolution imaging which acquires a single integrated image with high contrast and high resolving power reconstructed from high-contrast array images. It is expected that this ultrathin arrayed camera can be applied for further developing mobile devices, advanced surveillance vehicles, and endoscopes.
Professor Jeong said, “This research has led to technological advances in imaging technology. We will continue to strive to make significant impacts on multidisciplinary research projects in the fields of microtechnology and nanotechnology, seeking inspiration from natural photonic structures.”
This work was featured in Light Science & Applications last month and was supported by the National Research Foundation (NRF) of and the Ministry of Health and Welfare (MOHW) of Korea.
Image credit: Professor Ki-Hun Jeong, KAIST
Image usage restrictions: News organizations may use or redistribute this image, with proper attribution, as part of news coverage of this paper only.
Publication:
Kisoo Kim, Kyung-Won Jang, Jae-Kwan Ryu, and Ki-Hun Jeong. (2020) “Biologically inspired ultrathin arrayed camera for high-contrast and high-resolution imaging”. Light Science & Applications. Volume 9. Article 28. Available online at https://doi.org/10.1038/s41377-020-0261-8
Profile:
Ki-Hun Jeong
Professor
kjeong@kaist.ac.kr
http://biophotonics.kaist.ac.kr/
Department of Bio and Brain Engineering
KAIST
Profile:
Kisoo Kim
Ph.D. Candidate
kisoo.kim1@kaist.ac.kr
http://biophotonics.kaist.ac.kr/
Department of Bio and Brain Engineering
KAIST
(END)
2020.03.23 View 20893
Ultrathin but Fully Packaged High-Resolution Camera
- Biologically inspired ultrathin arrayed camera captures super-resolution images. -
The unique structures of biological vision systems in nature inspired scientists to design ultracompact imaging systems. A research group led by Professor Ki-Hun Jeong have made an ultracompact camera that captures high-contrast and high-resolution images. Fully packaged with micro-optical elements such as inverted micro-lenses, multilayered pinhole arrays, and gap spacers on the image sensor, the camera boasts a total track length of 740 μm and a field of view of 73°.
Inspired by the eye structures of the paper wasp species Xenos peckii, the research team completely suppressed optical noise between micro-lenses while reducing camera thickness. The camera has successfully demonstrated high-contrast clear array images acquired from tiny micro lenses. To further enhance the image quality of the captured image, the team combined the arrayed images into one image through super-resolution imaging.
An insect’s compound eye has superior visual characteristics, such as a wide viewing angle, high motion sensitivity, and a large depth of field while maintaining a small volume of visual structure with a small focal length. Among them, the eyes of Xenos peckii and an endoparasite found on paper wasps have hundreds of photoreceptors in a single lens unlike conventional compound eyes. In particular, the eye structures of an adult Xenos peckii exhibit hundreds of photoreceptors on an individual eyelet and offer engineering inspiration for ultrathin cameras or imaging applications because they have higher visual acuity than other compound eyes.
For instance, Xenos peckii’s eye-inspired cameras provide a 50 times higher spatial resolution than those based on arthropod eyes. In addition, the effective image resolution of the Xenos peckii’s eye can be further improved using the image overlaps between neighboring eyelets. This unique structure offers higher visual resolution than other insect eyes.
The team achieved high-contrast and super-resolution imaging through a novel arrayed design of micro-optical elements comprising multilayered aperture arrays and inverted micro-lens arrays directly stacked over an image sensor. This optical component was integrated with a complementary metal oxide semiconductor image sensor.
This is first demonstration of super-resolution imaging which acquires a single integrated image with high contrast and high resolving power reconstructed from high-contrast array images. It is expected that this ultrathin arrayed camera can be applied for further developing mobile devices, advanced surveillance vehicles, and endoscopes.
Professor Jeong said, “This research has led to technological advances in imaging technology. We will continue to strive to make significant impacts on multidisciplinary research projects in the fields of microtechnology and nanotechnology, seeking inspiration from natural photonic structures.”
This work was featured in Light Science & Applications last month and was supported by the National Research Foundation (NRF) of and the Ministry of Health and Welfare (MOHW) of Korea.
Image credit: Professor Ki-Hun Jeong, KAIST
Image usage restrictions: News organizations may use or redistribute this image, with proper attribution, as part of news coverage of this paper only.
Publication:
Kisoo Kim, Kyung-Won Jang, Jae-Kwan Ryu, and Ki-Hun Jeong. (2020) “Biologically inspired ultrathin arrayed camera for high-contrast and high-resolution imaging”. Light Science & Applications. Volume 9. Article 28. Available online at https://doi.org/10.1038/s41377-020-0261-8
Profile:
Ki-Hun Jeong
Professor
kjeong@kaist.ac.kr
http://biophotonics.kaist.ac.kr/
Department of Bio and Brain Engineering
KAIST
Profile:
Kisoo Kim
Ph.D. Candidate
kisoo.kim1@kaist.ac.kr
http://biophotonics.kaist.ac.kr/
Department of Bio and Brain Engineering
KAIST
(END)
2020.03.23 View 20893 -
 COVID-19 Update: All Undergrad Housing Closed
KAIST stepped up preventive measures against the outbreak of COVID-19 by closing all housing complexes for undergraduate students.
Provost Kwang-Hyung Lee, in an email to KAIST community members on March 12, advised all undergraduate students who had already moved in to the dormitories to move out by March 23. The university opened the spring semester on March 16, two weeks later than originally scheduled, due to the outbreak. All in-person classes have been shifted to online classes and this will continue until further notice.
“The dormitory would likely become the source of a COVID-19 cluster on the campus. Given the gravity of the current situation, we can’t help but make this unprecedented measure. It is fully for the best interests for our students’ health and safety. It saddens me to say that students are required to go back to their homes,” said Provost Lee. Dormitory fees will be refunded, and transportation and storage services will be provided for students who return back home. It has not yet been decided when they can return to the campus.
There are four exceptional cases for this special measure: 1. when a student does not have legal residency in Korea, 2. if a student’s legal residence is located in a severely affected region such as Daegu, Chongdo, and Kyongsan, 3. if students in their final semester before the graduation need to take a research class that is not available online, 4. if students have a very special reason that does not allow them to stay at home. Such students are required to meet the Associate Vice President of Student Life for approval of the exceptional stay.
Meanwhile, the first day of the online semester on March 16 saw an overwhelming amount of traffic on the remote educational platform, the KAIST learning management system (KLMS), and the real-time platform, Zoom. The two systems were both overloaded. The Dean of the KAIST Academy sent an email to the community, explaining the technical glitch causing the overload. He said his office had fixed the problem, allowing resumed access to the system from inside and outside the campus. Considered the nature of classes that are difficult or impossible to provide online, the university decided to cancel the some of physical training classes such as golf, dance sports, badminton, swimming, and tennis this semester.
Social distancing is another issue the university is enhancing throughout the campus. The university announced new lunch break shifts to disperse the dining hall crowds; the first shift is from 11:30 to 12:30 and the second shift is from 12:30 to 13:30, effective from March 17. The COVID-19 response bulletin also instructed KAIST community members to sit in a row, not face to face, when eating together with colleagues, and asked them to refrain from talking while eating. In addition, a total of 29 virus and fine duster filtering machines have been installed across the campus dining facilities.
The bulletin posted on March 13 restressed the importance of wearing a face mask in compact areas such as elevators and refrain the non-essential business or personal travel. Parents who need to take care of their children due to the closure of schools and day care centers are advised to work from home.
(END)
2020.03.16 View 9483
COVID-19 Update: All Undergrad Housing Closed
KAIST stepped up preventive measures against the outbreak of COVID-19 by closing all housing complexes for undergraduate students.
Provost Kwang-Hyung Lee, in an email to KAIST community members on March 12, advised all undergraduate students who had already moved in to the dormitories to move out by March 23. The university opened the spring semester on March 16, two weeks later than originally scheduled, due to the outbreak. All in-person classes have been shifted to online classes and this will continue until further notice.
“The dormitory would likely become the source of a COVID-19 cluster on the campus. Given the gravity of the current situation, we can’t help but make this unprecedented measure. It is fully for the best interests for our students’ health and safety. It saddens me to say that students are required to go back to their homes,” said Provost Lee. Dormitory fees will be refunded, and transportation and storage services will be provided for students who return back home. It has not yet been decided when they can return to the campus.
There are four exceptional cases for this special measure: 1. when a student does not have legal residency in Korea, 2. if a student’s legal residence is located in a severely affected region such as Daegu, Chongdo, and Kyongsan, 3. if students in their final semester before the graduation need to take a research class that is not available online, 4. if students have a very special reason that does not allow them to stay at home. Such students are required to meet the Associate Vice President of Student Life for approval of the exceptional stay.
Meanwhile, the first day of the online semester on March 16 saw an overwhelming amount of traffic on the remote educational platform, the KAIST learning management system (KLMS), and the real-time platform, Zoom. The two systems were both overloaded. The Dean of the KAIST Academy sent an email to the community, explaining the technical glitch causing the overload. He said his office had fixed the problem, allowing resumed access to the system from inside and outside the campus. Considered the nature of classes that are difficult or impossible to provide online, the university decided to cancel the some of physical training classes such as golf, dance sports, badminton, swimming, and tennis this semester.
Social distancing is another issue the university is enhancing throughout the campus. The university announced new lunch break shifts to disperse the dining hall crowds; the first shift is from 11:30 to 12:30 and the second shift is from 12:30 to 13:30, effective from March 17. The COVID-19 response bulletin also instructed KAIST community members to sit in a row, not face to face, when eating together with colleagues, and asked them to refrain from talking while eating. In addition, a total of 29 virus and fine duster filtering machines have been installed across the campus dining facilities.
The bulletin posted on March 13 restressed the importance of wearing a face mask in compact areas such as elevators and refrain the non-essential business or personal travel. Parents who need to take care of their children due to the closure of schools and day care centers are advised to work from home.
(END)
2020.03.16 View 9483 -
 COVID-19 Update: All Classes to Go Online after Semester Opens
All classes of undergraduate and graduate courses will go online from March 16 in a protective measure for the KAIST community to slow the spread of COVID-19. No decision has yet been made for how long the online classes will last. The spring semester will start two weeks later than scheduled due to the outbreak of the COVID-19.
For online classes, professors are uploading their taped class video clips onto the KAIST Learning Management System (KLMS). These classes will be conducted in both real time and on demand. The video conferencing solution Zoom will be employed for real-time online classes, and professors and students will interact using the bulletin board function for on-demand classes.
The university is scaling up its institutional response to protect the KAIST community against the outbreak of the disease following the cancellation and postponing of major academic events including the commencement and matriculation ceremonies scheduled in February and March.
The new protective measures include all sports complexes and facilities temporarily closing from February 24. All building entrance gates are only accessible with those carrying a KAIST ID card. A total of nine fever monitors have been installed in the university headquarter building, main library, dining halls, the day care center at Daejeon campus, and at the Seoul campus.
The Emergency Response Team is posting a daily bulletin and response manual on the KAIST portal system with updates on the number of confirmed cases in Daejeon and other regions including Seoul as well as reminder notices to help contain the spread.
Provost Kwang-Hyung Lee advised KAIST community members to refrain from traveling to the gravely affected region and foreign countries in an email sent on March 11. Anyone who has a travel history in those regions should report it to the Emergency Response Team and self-quarantine for two weeks at home or in a designated dorm complex.
KAIST surveyed all community members’ travel histories last month and instructed those who had traveled to Daegu and foreign countries or had contact with a confirmed patient to go into self-isolation or work from home while conducting intensive self-monitoring. They have been asked to report their temperature to the Emergency Response Team twice a day. The response manual recommends canceling or postponing meetings and events at the campus. “If necessary, we ask that you make a conference call instead,” said the Emergency Response Team.
Meanwhile, the Academic Affairs Office decided to employ a flexible academic schedule in consideration of students’ circumstances during this extraordinary outbreak situation. “We still need to run 16 weeks of classes for the semester but we are being flexible in how the classes can be run. It will wholly depend on the professor and students’ discussions based on their situation. We won’t apply a unilateral mid-term and final exam week during this special time,” said the bulletin from the Academic Affairs Office.
(END)
2020.03.11 View 9186
COVID-19 Update: All Classes to Go Online after Semester Opens
All classes of undergraduate and graduate courses will go online from March 16 in a protective measure for the KAIST community to slow the spread of COVID-19. No decision has yet been made for how long the online classes will last. The spring semester will start two weeks later than scheduled due to the outbreak of the COVID-19.
For online classes, professors are uploading their taped class video clips onto the KAIST Learning Management System (KLMS). These classes will be conducted in both real time and on demand. The video conferencing solution Zoom will be employed for real-time online classes, and professors and students will interact using the bulletin board function for on-demand classes.
The university is scaling up its institutional response to protect the KAIST community against the outbreak of the disease following the cancellation and postponing of major academic events including the commencement and matriculation ceremonies scheduled in February and March.
The new protective measures include all sports complexes and facilities temporarily closing from February 24. All building entrance gates are only accessible with those carrying a KAIST ID card. A total of nine fever monitors have been installed in the university headquarter building, main library, dining halls, the day care center at Daejeon campus, and at the Seoul campus.
The Emergency Response Team is posting a daily bulletin and response manual on the KAIST portal system with updates on the number of confirmed cases in Daejeon and other regions including Seoul as well as reminder notices to help contain the spread.
Provost Kwang-Hyung Lee advised KAIST community members to refrain from traveling to the gravely affected region and foreign countries in an email sent on March 11. Anyone who has a travel history in those regions should report it to the Emergency Response Team and self-quarantine for two weeks at home or in a designated dorm complex.
KAIST surveyed all community members’ travel histories last month and instructed those who had traveled to Daegu and foreign countries or had contact with a confirmed patient to go into self-isolation or work from home while conducting intensive self-monitoring. They have been asked to report their temperature to the Emergency Response Team twice a day. The response manual recommends canceling or postponing meetings and events at the campus. “If necessary, we ask that you make a conference call instead,” said the Emergency Response Team.
Meanwhile, the Academic Affairs Office decided to employ a flexible academic schedule in consideration of students’ circumstances during this extraordinary outbreak situation. “We still need to run 16 weeks of classes for the semester but we are being flexible in how the classes can be run. It will wholly depend on the professor and students’ discussions based on their situation. We won’t apply a unilateral mid-term and final exam week during this special time,” said the bulletin from the Academic Affairs Office.
(END)
2020.03.11 View 9186 -
 Professor Hojong Chang’s Research Team Wins ISIITA 2020 Best Paper Award
The paper written by Professor Hojong Chang’s research team from KAIST Institute for IT Convergence won the best paper award from the International Symposium on Innovation in Information Technology Application (ISIITA) 2020, held this month at Ton Duc Thang University in Vietnam.
ISIITA is a networking symposium where leading researchers from various fields including information and communications, biotechnology, and computer systems come together and share on the convergence of technology.
Professor Chang’s team won the best paper award at this year’s symposium with its paper, “A Study of Single Photon Counting System for Quantitative Analysis of Luminescence”. The awarded paper discusses the realization of a signal processing system for silicon photomultipliers.
The silicon photomultiplier is the core of a urinalysis technique that tests for sodium and potassium in the body using simple chemical reactions. If our bodily sodium and potassium levels exceed a certain amount, it can lead to high blood pressure, cardiovascular problems, and kidney damage.
Through this research, the team has developed a core technique that quantifies the sodium and potassium discharged in the urine. When the reagent is injected into the urine, a very small amount of light is emitted as a result of the chemical reaction. However, if there is a large amount of sodium and potassium, they interrupt the reaction and reduce the emission. The key to this measurement technique is digitizing the strength of this very fine emission of light. Professor Chang’s team developed a system that uses a photomultiplier to measure the chemiluminescence.
Professor Chang said, “I look forward for this signal processing system greatly helping to prevent diseases caused by the excessive consumption of sodium and potassium through quick and easy detection.”
Researcher Byunghun Han who carried out the central research for the system design added, “We are planning to focus on miniaturizing the developed technique, so that anyone can carry our device around like a cellphone.”
The research was supported by the Ministry of Science and ICT.
(END)
2020.02.27 View 12038
Professor Hojong Chang’s Research Team Wins ISIITA 2020 Best Paper Award
The paper written by Professor Hojong Chang’s research team from KAIST Institute for IT Convergence won the best paper award from the International Symposium on Innovation in Information Technology Application (ISIITA) 2020, held this month at Ton Duc Thang University in Vietnam.
ISIITA is a networking symposium where leading researchers from various fields including information and communications, biotechnology, and computer systems come together and share on the convergence of technology.
Professor Chang’s team won the best paper award at this year’s symposium with its paper, “A Study of Single Photon Counting System for Quantitative Analysis of Luminescence”. The awarded paper discusses the realization of a signal processing system for silicon photomultipliers.
The silicon photomultiplier is the core of a urinalysis technique that tests for sodium and potassium in the body using simple chemical reactions. If our bodily sodium and potassium levels exceed a certain amount, it can lead to high blood pressure, cardiovascular problems, and kidney damage.
Through this research, the team has developed a core technique that quantifies the sodium and potassium discharged in the urine. When the reagent is injected into the urine, a very small amount of light is emitted as a result of the chemical reaction. However, if there is a large amount of sodium and potassium, they interrupt the reaction and reduce the emission. The key to this measurement technique is digitizing the strength of this very fine emission of light. Professor Chang’s team developed a system that uses a photomultiplier to measure the chemiluminescence.
Professor Chang said, “I look forward for this signal processing system greatly helping to prevent diseases caused by the excessive consumption of sodium and potassium through quick and easy detection.”
Researcher Byunghun Han who carried out the central research for the system design added, “We are planning to focus on miniaturizing the developed technique, so that anyone can carry our device around like a cellphone.”
The research was supported by the Ministry of Science and ICT.
(END)
2020.02.27 View 12038