-
 The 3rd Global Entrepreneurship Summer School (GESS 2024) Successfully Completed in Silicon Valley
The 2024 Global Entrepreneurship Summer School (2024 KAIST GESS), hosted by the Office of Global Initiatives under the KAIST International Office (Director Man-Sung Yim), was held for the third time. This program allows students to visit Silicon Valley, a global startup hub, to directly experience its famous startup ecosystem and develop their capabilities for global expansion. A total of 20 students were selected through applications, interviews, final presentations, mentoring, and peer evaluations. Additionally, 17 students from the KAIST Impact MBA course at the KAIST Business School also participated.
Before starting the Silicon Valley program, participants received mentoring on business model development and pitching advice from a senior entrepreneur at KAIST for about two months, beginning last May. Afterward, they developed business items for each team at KAIST’s main campus in Daejeon. For seven days, starting from June 23rd, workshops were held under the themes of global entrepreneurship, learning through failure, capital and network, and startup culture at KOTRA Silicon Valley Trade Center, JP Morgan, and Plug and Play Tech Center. This program's lecture series provided prospective entrepreneurs with the opportunity to systematically learn the mindset and gain the experience needed to start a global business.
The participants also visited local companies and gained experience in the field of global technology startups. Visits included Bear Robotics (CEO John Ha), Soundable Health (CEO Cathering Song), ImpriMed (CEO Sungwon Lim), Phantom AI (CEO Hyunggi Cho), B Garage (CEO Aiden Kim), and Simple Steps (CEO Doyeon Kim). Lectures contained vivid experiences from Silicon Valley CEOs and company tours boosted the students' passion for entrepreneurship. In particular, Doyeon Kim, CEO of Simple Steps, which helps prevent career breaks for Korean female immigrants in Silicon Valley and allows talented female immigrants to demonstrate their abilities in society, said, “As a KAIST alumna entrepreneur, it was meaningful to share my experience with this generation of students who dream of starting a global business and creating social enterprises in the United States.”
This program also included a tour of Silicon Valley's big tech companies that have made a significant impact on the digital ecosystem through technological advancement and innovation. This included Broadcom, which maintains a strong global presence in the semiconductor and infrastructure software technology fields. At the invitation of Chairman Hock Tan, GESS participants had the opportunity to attend his lecture and ask questions. Chairman Tan, who received an honorary doctorate in engineering from KAIST last February, emphasized that experiencing failure and giving consistent effort over a long period of time are more important than anything else in order to grow as a global entrepreneur, and that technologies influencing the global market evolve over generations.
< Photo. Group photo of GESS 2024 participants at Broadcom with Chairman Hock Tan (center) ⓒBroadcom>
As part of this program, participants conducted a volunteer program called 'Let's play with AI+ Tech' with the Sunnyvale community in Silicon Valley and Foothill College to help grow together with the community. Through this program, GESS participants cultivated the virtues of a global leader. In this volunteer activity, low-income elementary school students and parents from the Sunnyvale community participated in chatbot training led by KAIST students, providing an opportunity to work with underprivileged groups in the local community.
In the final pitching event, the highlight of the program, local venture investors from Silicon Valley were invited as judges and evaluated the pitches for each team's business items. The participating students, who developed their own business models while receiving advice through face-to-face mentoring from a professional accelerator in Silicon Valley, showcased their creative and innovative ideas, presenting themselves as future global entrepreneurs. Merey Makhmutova (BS in Civil and Environmental Engineering) from the K-Bridge team, who won the final pitch, expressed her ambition: “Even before GESS pitch day, our team kept refining the pitch deck as we attended the lectures and benefitted from the mentoring. Our intense teamwork was a significant reason why we ultimately won first prize.” She added that K-Bridge aims to win an award at the upcoming UKC Pitching Competition and expressed her gratitude for being able to participate in this program. Arseniy Kan (BS in Electrical Engineering) from the KAIST Enablers team, who took second place, said, “The 2024 KAIST GESS Program became the most unforgettable and precious opportunity of my lifetime, and I dream of using this opportunity as a stepping stone to becoming a global entrepreneur.“ Additionally, Kangster (CEO Kang Kim), who won the Impact MBA final pitching session, had the opportunity to secure a meeting with a local investment company after their GESS final pitch.
The 2024 KAIST GESS was held in cooperation with the KAIST International Office, the KAIST College of Business, and Startup KAIST. Director Man-Sung Yim from the Office of Global Initiatives, who hosted the event, said, “KAIST students will grow into leaders with global influence and contribute to the international community by creating global value. At the same time, we hope to raise the international status of our university.” Professor Sangchan Park, who led the 17 Impact MBA students in this educational program, added, “Meeting with companies leading the global market and visiting Silicon Valley has been a valuable learning experience for students aiming to start a global startup.”
KAIST plans to continue promoting its global entrepreneurship education program by enriching its curriculum each year and helping students grow into entrepreneurs with the virtues of global leaders.
2024.07.03 View 9627
The 3rd Global Entrepreneurship Summer School (GESS 2024) Successfully Completed in Silicon Valley
The 2024 Global Entrepreneurship Summer School (2024 KAIST GESS), hosted by the Office of Global Initiatives under the KAIST International Office (Director Man-Sung Yim), was held for the third time. This program allows students to visit Silicon Valley, a global startup hub, to directly experience its famous startup ecosystem and develop their capabilities for global expansion. A total of 20 students were selected through applications, interviews, final presentations, mentoring, and peer evaluations. Additionally, 17 students from the KAIST Impact MBA course at the KAIST Business School also participated.
Before starting the Silicon Valley program, participants received mentoring on business model development and pitching advice from a senior entrepreneur at KAIST for about two months, beginning last May. Afterward, they developed business items for each team at KAIST’s main campus in Daejeon. For seven days, starting from June 23rd, workshops were held under the themes of global entrepreneurship, learning through failure, capital and network, and startup culture at KOTRA Silicon Valley Trade Center, JP Morgan, and Plug and Play Tech Center. This program's lecture series provided prospective entrepreneurs with the opportunity to systematically learn the mindset and gain the experience needed to start a global business.
The participants also visited local companies and gained experience in the field of global technology startups. Visits included Bear Robotics (CEO John Ha), Soundable Health (CEO Cathering Song), ImpriMed (CEO Sungwon Lim), Phantom AI (CEO Hyunggi Cho), B Garage (CEO Aiden Kim), and Simple Steps (CEO Doyeon Kim). Lectures contained vivid experiences from Silicon Valley CEOs and company tours boosted the students' passion for entrepreneurship. In particular, Doyeon Kim, CEO of Simple Steps, which helps prevent career breaks for Korean female immigrants in Silicon Valley and allows talented female immigrants to demonstrate their abilities in society, said, “As a KAIST alumna entrepreneur, it was meaningful to share my experience with this generation of students who dream of starting a global business and creating social enterprises in the United States.”
This program also included a tour of Silicon Valley's big tech companies that have made a significant impact on the digital ecosystem through technological advancement and innovation. This included Broadcom, which maintains a strong global presence in the semiconductor and infrastructure software technology fields. At the invitation of Chairman Hock Tan, GESS participants had the opportunity to attend his lecture and ask questions. Chairman Tan, who received an honorary doctorate in engineering from KAIST last February, emphasized that experiencing failure and giving consistent effort over a long period of time are more important than anything else in order to grow as a global entrepreneur, and that technologies influencing the global market evolve over generations.
< Photo. Group photo of GESS 2024 participants at Broadcom with Chairman Hock Tan (center) ⓒBroadcom>
As part of this program, participants conducted a volunteer program called 'Let's play with AI+ Tech' with the Sunnyvale community in Silicon Valley and Foothill College to help grow together with the community. Through this program, GESS participants cultivated the virtues of a global leader. In this volunteer activity, low-income elementary school students and parents from the Sunnyvale community participated in chatbot training led by KAIST students, providing an opportunity to work with underprivileged groups in the local community.
In the final pitching event, the highlight of the program, local venture investors from Silicon Valley were invited as judges and evaluated the pitches for each team's business items. The participating students, who developed their own business models while receiving advice through face-to-face mentoring from a professional accelerator in Silicon Valley, showcased their creative and innovative ideas, presenting themselves as future global entrepreneurs. Merey Makhmutova (BS in Civil and Environmental Engineering) from the K-Bridge team, who won the final pitch, expressed her ambition: “Even before GESS pitch day, our team kept refining the pitch deck as we attended the lectures and benefitted from the mentoring. Our intense teamwork was a significant reason why we ultimately won first prize.” She added that K-Bridge aims to win an award at the upcoming UKC Pitching Competition and expressed her gratitude for being able to participate in this program. Arseniy Kan (BS in Electrical Engineering) from the KAIST Enablers team, who took second place, said, “The 2024 KAIST GESS Program became the most unforgettable and precious opportunity of my lifetime, and I dream of using this opportunity as a stepping stone to becoming a global entrepreneur.“ Additionally, Kangster (CEO Kang Kim), who won the Impact MBA final pitching session, had the opportunity to secure a meeting with a local investment company after their GESS final pitch.
The 2024 KAIST GESS was held in cooperation with the KAIST International Office, the KAIST College of Business, and Startup KAIST. Director Man-Sung Yim from the Office of Global Initiatives, who hosted the event, said, “KAIST students will grow into leaders with global influence and contribute to the international community by creating global value. At the same time, we hope to raise the international status of our university.” Professor Sangchan Park, who led the 17 Impact MBA students in this educational program, added, “Meeting with companies leading the global market and visiting Silicon Valley has been a valuable learning experience for students aiming to start a global startup.”
KAIST plans to continue promoting its global entrepreneurship education program by enriching its curriculum each year and helping students grow into entrepreneurs with the virtues of global leaders.
2024.07.03 View 9627 -
 KAIST Employs Image-recognition AI to Determine Battery Composition and Conditions
An international collaborative research team has developed an image recognition technology that can accurately determine the elemental composition and the number of charge and discharge cycles of a battery by examining only its surface morphology using AI learning.
KAIST (President Kwang-Hyung Lee) announced on July 2nd that Professor Seungbum Hong from the Department of Materials Science and Engineering, in collaboration with the Electronics and Telecommunications Research Institute (ETRI) and Drexel University in the United States, has developed a method to predict the major elemental composition and charge-discharge state of NCM cathode materials with 99.6% accuracy using convolutional neural networks (CNN)*.
*Convolutional Neural Network (CNN): A type of multi-layer, feed-forward, artificial neural network used for analyzing visual images.
The research team noted that while scanning electron microscopy (SEM) is used in semiconductor manufacturing to inspect wafer defects, it is rarely used in battery inspections. SEM is used for batteries to analyze the size of particles only at research sites, and reliability is predicted from the broken particles and the shape of the breakage in the case of deteriorated battery materials.
The research team decided that it would be groundbreaking if an automated SEM can be used in the process of battery production, just like in the semiconductor manufacturing, to inspect the surface of the cathode material to determine whether it was synthesized according to the desired composition and that the lifespan would be reliable, thereby reducing the defect rate.
< Figure 1. Example images of true cases and their grad-CAM overlays from the best trained network. >
The researchers trained a CNN-based AI applicable to autonomous vehicles to learn the surface images of battery materials, enabling it to predict the major elemental composition and charge-discharge cycle states of the cathode materials. They found that while the method could accurately predict the composition of materials with additives, it had lower accuracy for predicting charge-discharge states. The team plans to further train the AI with various battery material morphologies produced through different processes and ultimately use it for inspecting the compositional uniformity and predicting the lifespan of next-generation batteries.
Professor Joshua C. Agar, one of the collaborating researchers of the project from the Department of Mechanical Engineering and Mechanics of Drexel University, said, "In the future, artificial intelligence is expected to be applied not only to battery materials but also to various dynamic processes in functional materials synthesis, clean energy generation in fusion, and understanding foundations of particles and the universe."
Professor Seungbum Hong from KAIST, who led the research, stated, "This research is significant as it is the first in the world to develop an AI-based methodology that can quickly and accurately predict the major elemental composition and the state of the battery from the structural data of micron-scale SEM images. The methodology developed in this study for identifying the composition and state of battery materials based on microscopic images is expected to play a crucial role in improving the performance and quality of battery materials in the future."
< Figure 2. Accuracies of CNN Model predictions on SEM images of NCM cathode materials with additives under various conditions. >
This research was conducted by KAIST’s Materials Science and Engineering Department graduates Dr. Jimin Oh and Dr. Jiwon Yeom, the co-first authors, in collaboration with Professor Josh Agar and Dr. Kwang Man Kim from ETRI. It was supported by the National Research Foundation of Korea, the KAIST Global Singularity project, and international collaboration with the US research team. The results were published in the international journal npj Computational Materials on May 4. (Paper Title: “Composition and state prediction of lithium-ion cathode via convolutional neural network trained on scanning electron microscopy images”)
2024.07.02 View 6822
KAIST Employs Image-recognition AI to Determine Battery Composition and Conditions
An international collaborative research team has developed an image recognition technology that can accurately determine the elemental composition and the number of charge and discharge cycles of a battery by examining only its surface morphology using AI learning.
KAIST (President Kwang-Hyung Lee) announced on July 2nd that Professor Seungbum Hong from the Department of Materials Science and Engineering, in collaboration with the Electronics and Telecommunications Research Institute (ETRI) and Drexel University in the United States, has developed a method to predict the major elemental composition and charge-discharge state of NCM cathode materials with 99.6% accuracy using convolutional neural networks (CNN)*.
*Convolutional Neural Network (CNN): A type of multi-layer, feed-forward, artificial neural network used for analyzing visual images.
The research team noted that while scanning electron microscopy (SEM) is used in semiconductor manufacturing to inspect wafer defects, it is rarely used in battery inspections. SEM is used for batteries to analyze the size of particles only at research sites, and reliability is predicted from the broken particles and the shape of the breakage in the case of deteriorated battery materials.
The research team decided that it would be groundbreaking if an automated SEM can be used in the process of battery production, just like in the semiconductor manufacturing, to inspect the surface of the cathode material to determine whether it was synthesized according to the desired composition and that the lifespan would be reliable, thereby reducing the defect rate.
< Figure 1. Example images of true cases and their grad-CAM overlays from the best trained network. >
The researchers trained a CNN-based AI applicable to autonomous vehicles to learn the surface images of battery materials, enabling it to predict the major elemental composition and charge-discharge cycle states of the cathode materials. They found that while the method could accurately predict the composition of materials with additives, it had lower accuracy for predicting charge-discharge states. The team plans to further train the AI with various battery material morphologies produced through different processes and ultimately use it for inspecting the compositional uniformity and predicting the lifespan of next-generation batteries.
Professor Joshua C. Agar, one of the collaborating researchers of the project from the Department of Mechanical Engineering and Mechanics of Drexel University, said, "In the future, artificial intelligence is expected to be applied not only to battery materials but also to various dynamic processes in functional materials synthesis, clean energy generation in fusion, and understanding foundations of particles and the universe."
Professor Seungbum Hong from KAIST, who led the research, stated, "This research is significant as it is the first in the world to develop an AI-based methodology that can quickly and accurately predict the major elemental composition and the state of the battery from the structural data of micron-scale SEM images. The methodology developed in this study for identifying the composition and state of battery materials based on microscopic images is expected to play a crucial role in improving the performance and quality of battery materials in the future."
< Figure 2. Accuracies of CNN Model predictions on SEM images of NCM cathode materials with additives under various conditions. >
This research was conducted by KAIST’s Materials Science and Engineering Department graduates Dr. Jimin Oh and Dr. Jiwon Yeom, the co-first authors, in collaboration with Professor Josh Agar and Dr. Kwang Man Kim from ETRI. It was supported by the National Research Foundation of Korea, the KAIST Global Singularity project, and international collaboration with the US research team. The results were published in the international journal npj Computational Materials on May 4. (Paper Title: “Composition and state prediction of lithium-ion cathode via convolutional neural network trained on scanning electron microscopy images”)
2024.07.02 View 6822 -
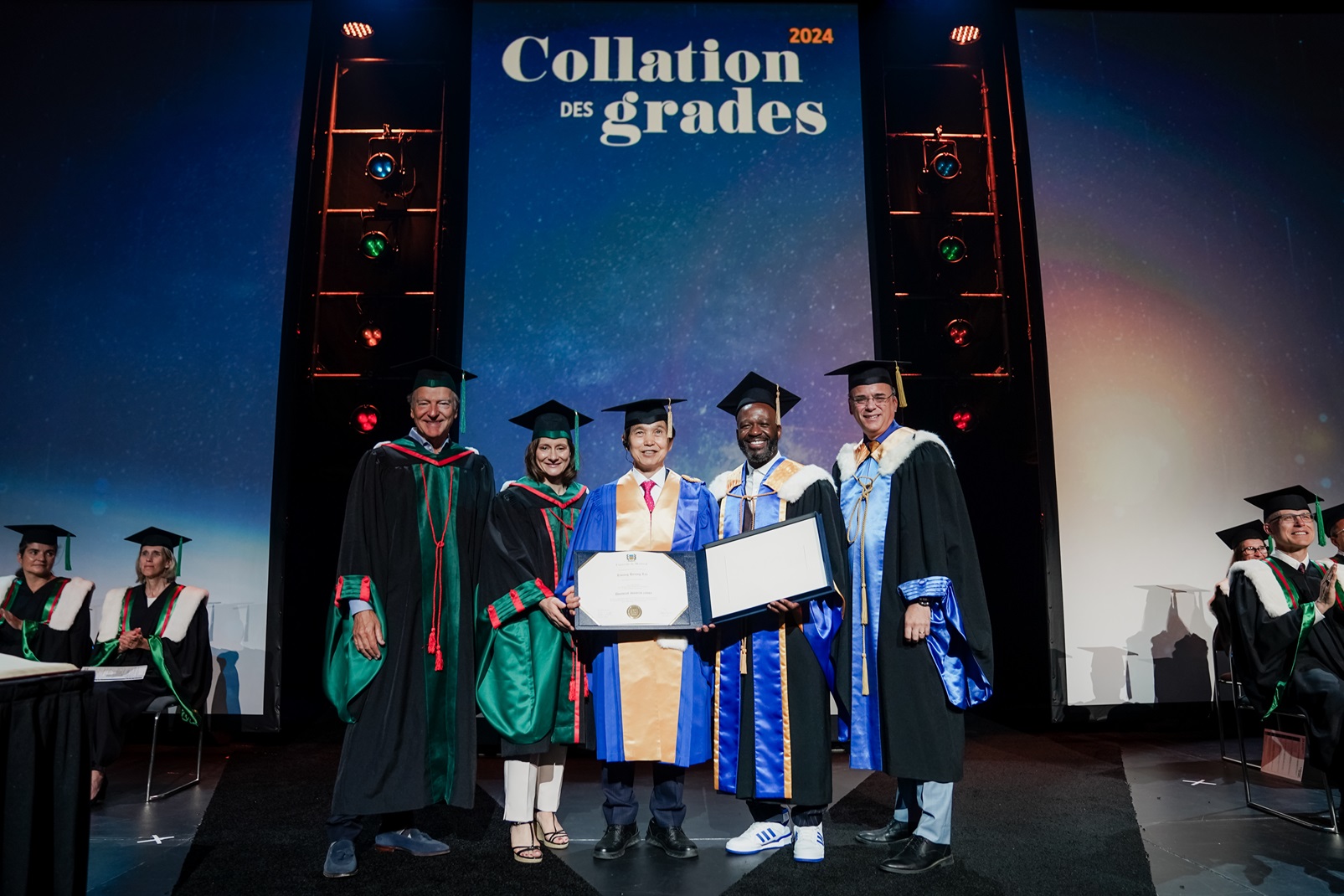 KAIST President Kwang-Hyung Lee receives honorary doctorate from Université de Montréal
KAIST (President Kwang-Hyung Lee) announced on June 16th that President Kwang-Hyung Lee received an honorary doctorate on the 15th, local time, from the Université de Montréal in Canada, one of the largest French-speaking universities in North America.
< Image. (from left) Mr. Pierre Lassonde, Chairman of the Board of Polytechnique Montréal, President Maud Cohen of Polytechnique Montréal, President Kwang-Hyung Lee of KAIST, Chancellor Frantz Saintellemy of Université de Montréal and Mr. Alexandre Chabot, Secretary General of Université de Montéal. >
President Lee was selected as the recipient of the honorary doctorate from the Université de Montréal upon the recommendation of Polytechnique Montréal in recognition of his contributions in pioneering the multidisciplinary approach to integrate a number of fields studies including computer science, biology, and nanotechnology.
Polytechnique Montréal is a university in affiliation with the University of Montréal and is one of the largest engineering education and research institutions of Canada. President Lee's honorary doctorate was awarded at the Convocation Ceremony of Polytechnique Montréal held for the Class of 2024. On this day, Mr. Serge Gendron, a businessman, a philanthropist and an alum of Polytechnique Montréal, also had the honor of receiving an honorary doctorate along with President Lee.
President Kwang-Hyung Lee is internationally recognized for his contributions in various fields, including engineering education, multidisciplinary research, strategy establishment, and future prospects. President Lee is also well known to have had significant influence on the first-generation venture entrepreneurs, a large portion of which are from KAIST, who have now grown into full-fledged entrepreneurs. For these activities, President Lee received numerous decorations and commendations within Korea, including the National Order of Civil Merit - Camellia Medal, and in 2003, he received the ‘Légion d’Honneur Chevalier’ from the French government as well.
Through his speech at the ceremony, KAIST President Kwang-Hyung Lee expressed his gratitude to the Université de Montréal and Polytechnique Montréal, while congratulating and encouraging the graduates who are poised to start anew as they part from the school. “Hold on to your dreams, try looking at the world from a different perspective, and enjoy the challenges without being afraid of failures.” With these three pieces of advice, President Lee cheered on the graduates saying, “The future belongs to those of you who challenge them.”
Maud Cohen, the President of Polytechnique Montréal, commented on President Kwang-Hyung Lee's honorary doctorate, that Polytechnique Montréal is proud to award an honorary doctorate to Mr. Lee for his exceptional career path, his holistic, multidisciplinary and undeniably forward-looking vision, which strongly echoes the values of Polytechnique Montréal, and for his involvement in and commitment to education, research and the future of the next generation.
* Established in 1873, Polytechnique Montréal is one of Canada’s largest engineering education and research universities, and is located on the Université de Montréal campus – North America’s largest Francophone university campus. Joshua Bengio, who won the Turing Award for establishing the foundations of deep learning, is gaining international recognition in artificial intelligence and other related fields at Polytechnique Montréal. Polytechnique Montréal chose KAIST as the first Korean university establish partnership with and has continued to build up close cooperative relationship since 1998.
* The Université de Montréal (UdeM) is a public university founded in 1878. It is located in Montréal, in the French-speaking province of Québec, Canada. It is one of Canada's five major universities, and the second largest in terms of student enrollment. The Université de Montréal is the largest in the French-speaking world in terms of both student enrollment and research. The Université de Montréal enjoys an excellent reputation as one of the best French-language post-secondary institutions. Its rector is Mr. Daniel Jutras.
2024.06.16 View 6829
KAIST President Kwang-Hyung Lee receives honorary doctorate from Université de Montréal
KAIST (President Kwang-Hyung Lee) announced on June 16th that President Kwang-Hyung Lee received an honorary doctorate on the 15th, local time, from the Université de Montréal in Canada, one of the largest French-speaking universities in North America.
< Image. (from left) Mr. Pierre Lassonde, Chairman of the Board of Polytechnique Montréal, President Maud Cohen of Polytechnique Montréal, President Kwang-Hyung Lee of KAIST, Chancellor Frantz Saintellemy of Université de Montréal and Mr. Alexandre Chabot, Secretary General of Université de Montéal. >
President Lee was selected as the recipient of the honorary doctorate from the Université de Montréal upon the recommendation of Polytechnique Montréal in recognition of his contributions in pioneering the multidisciplinary approach to integrate a number of fields studies including computer science, biology, and nanotechnology.
Polytechnique Montréal is a university in affiliation with the University of Montréal and is one of the largest engineering education and research institutions of Canada. President Lee's honorary doctorate was awarded at the Convocation Ceremony of Polytechnique Montréal held for the Class of 2024. On this day, Mr. Serge Gendron, a businessman, a philanthropist and an alum of Polytechnique Montréal, also had the honor of receiving an honorary doctorate along with President Lee.
President Kwang-Hyung Lee is internationally recognized for his contributions in various fields, including engineering education, multidisciplinary research, strategy establishment, and future prospects. President Lee is also well known to have had significant influence on the first-generation venture entrepreneurs, a large portion of which are from KAIST, who have now grown into full-fledged entrepreneurs. For these activities, President Lee received numerous decorations and commendations within Korea, including the National Order of Civil Merit - Camellia Medal, and in 2003, he received the ‘Légion d’Honneur Chevalier’ from the French government as well.
Through his speech at the ceremony, KAIST President Kwang-Hyung Lee expressed his gratitude to the Université de Montréal and Polytechnique Montréal, while congratulating and encouraging the graduates who are poised to start anew as they part from the school. “Hold on to your dreams, try looking at the world from a different perspective, and enjoy the challenges without being afraid of failures.” With these three pieces of advice, President Lee cheered on the graduates saying, “The future belongs to those of you who challenge them.”
Maud Cohen, the President of Polytechnique Montréal, commented on President Kwang-Hyung Lee's honorary doctorate, that Polytechnique Montréal is proud to award an honorary doctorate to Mr. Lee for his exceptional career path, his holistic, multidisciplinary and undeniably forward-looking vision, which strongly echoes the values of Polytechnique Montréal, and for his involvement in and commitment to education, research and the future of the next generation.
* Established in 1873, Polytechnique Montréal is one of Canada’s largest engineering education and research universities, and is located on the Université de Montréal campus – North America’s largest Francophone university campus. Joshua Bengio, who won the Turing Award for establishing the foundations of deep learning, is gaining international recognition in artificial intelligence and other related fields at Polytechnique Montréal. Polytechnique Montréal chose KAIST as the first Korean university establish partnership with and has continued to build up close cooperative relationship since 1998.
* The Université de Montréal (UdeM) is a public university founded in 1878. It is located in Montréal, in the French-speaking province of Québec, Canada. It is one of Canada's five major universities, and the second largest in terms of student enrollment. The Université de Montréal is the largest in the French-speaking world in terms of both student enrollment and research. The Université de Montréal enjoys an excellent reputation as one of the best French-language post-secondary institutions. Its rector is Mr. Daniel Jutras.
2024.06.16 View 6829 -
 KAIST appoints K-Pop Star “G-Dragon” Kwon Ji-yong as a visiting professor
KAIST (President Kwang Hyung Lee) announced on June 5th that its Department of Mechanical Engineering has appointed Kwon Ji-yong, a K-Pop star better known as G-Dragon, as a visiting professor. The appointment was officiated at the “Innovate Korea 2024” event held at the KAIST Sports Complex in the morning of the 5th.
This appointment was promoted to expand the global competitiveness of Korean culture by applying the latest scientific technology developed from KAIST to K-content and the cultural industry.
An official from Galaxy Corporation, Mr. Kwon’s agency, said, “Through this appointment, we expect to contribute to market innovation and to the global spread and growth of K-culture through research and development of ‘entertech’*.”
* Entertech: A compound word of ‘entertainment’ and ‘technology’ refering to an industry that creates new added value by combining ICT with intellectual property rights (IP) and contents, which are the core values of entertainment.
The newly appointed Visiting Professor Kwon Ji-yong is scheduled to give a special lecture on leadership to undergraduate and graduate students. The purpose is to share his experience and life as a world-class artist to provide KAIST students with vision and insight into the world, as well as the courage and inspiration to pioneer within their own fields of expertise.
In addition, cultural events are planned to be held to help facilitate communication with KAIST members and provide artistic experiences necessary to grow into creative and convergent talents.
Joint research that applies KAIST's various technologies to art and cultural contents will also be pursued. ‘(temporarily named) KAIST-Galaxy Corporation Entertech Research Center’ will be established within the Department of Mechanical Engineering, conducting ▴research on Digital Twin technology for Korean Wave artists, starting with G-Dragon himself ▴convergent research on science and technology encompassing artificial intelligence, robots, and metaverse and K-Culture and ▴research on the development of differentiated avatars of artists using the latest technologies such as volumetrics, motion capture, and haptics.
Galaxy Corporation produces highly talked about televised shows including 'Physical: 100 Season 2', which achieved the feat of ranking first in the Netflix’s ‘Global Top 10 Non-English TV Shows’ category, as well as 'Street Woman Fighter', '2 Days & 1 Night', 'Let's Play Soccer: Mungchyeoya Chanda' and 'Mr. Trot 2', and expanded its IP (intellectual property rights) to all aspects of entertainment, from broadcasting to the music industry by recruiting G-Dragon in December last year.
It is an 'entertech' company that is pioneering a new content market by combining IP with the latest digital technologies such as metaverse, avatar, and artificial intelligence (AI). Based on these achievements, it recently signed a partnership with a global investment bank (IB). Through global investment, the company is soon to be the first entertech startup to become a unicorn (corporate value of 1 trillion won).
Kwon Ji-yong said, “It is an honor to be a visiting professor at KAIST, where countless scientific geniuses come out of. I am hoping the best of science and technology experts and my expertise in the entertainment business will come together and a great synergy, a ‘big bang’ will be ensue as a result.
“More and more musicians are working with artificial intelligence and these cutting-edge technologies enable more diverse forms of creative work,” he continued. He also expressed his specific wish. “Through the AI avatar developed jointly by Galaxy Corporation and KAIST, I wish to communicate more closely with my fans around the world that I cannot meet so often otherwise.”
President Kwang-Hyung Lee said, “Considering that KAIST is a university that has always explored new things and pioneered unknown territories since its establishment, I believe that Kwon Ji-yong also shares KAIST's DNA in that he is a leader and pioneer who has attained world-class achievements in the world of culture and arts.”
President Lee continued expressing his expectations saying, “Kwon Ji-yong will not only contribute to taking KAIST’s science and technology to spread and grow K-culture on the global stage, through his activities but also in sharing his experience and spirit as the trend leader of the world, he will be an asset to the members of KAIST which aims to become a top-tier university.”
The period of Kwon Ji-yong’s professorship is two years from the 4th of this month to June of 2026. In addition, Professor Kwon Ji-yong has been appointed as KAIST’s global ambassador to help strengthen KAIST's international presence.
Professor Kwon Ji-yong, who began his career as G-Dragon, has established himself as an icon symbolizing Korean pop culture over 18 years as a member and the leader of the K-Pop idol group 'Big Bang', which debuted in 2006 and gained global popularity. While being recognized for his outstanding ability in all aspects of his music, from writing lyrics, composing, and producing to performing, he has also been active in fashion, becoming the first Asian man to be selected as a global ambassador for Chanel in 2016, spreading Korean music and fashion to the world.
In June, 2017, he released his 3rd solo album 'Kwon Ji Yong' on USB instead of the existing CD format, for the first time in Korea. He also attended CES, the world's largest home appliance and IT exhibition held in Las Vegas, USA in January of this year, extending his strides as a 'tech-tainer'.
2024.06.05 View 19148
KAIST appoints K-Pop Star “G-Dragon” Kwon Ji-yong as a visiting professor
KAIST (President Kwang Hyung Lee) announced on June 5th that its Department of Mechanical Engineering has appointed Kwon Ji-yong, a K-Pop star better known as G-Dragon, as a visiting professor. The appointment was officiated at the “Innovate Korea 2024” event held at the KAIST Sports Complex in the morning of the 5th.
This appointment was promoted to expand the global competitiveness of Korean culture by applying the latest scientific technology developed from KAIST to K-content and the cultural industry.
An official from Galaxy Corporation, Mr. Kwon’s agency, said, “Through this appointment, we expect to contribute to market innovation and to the global spread and growth of K-culture through research and development of ‘entertech’*.”
* Entertech: A compound word of ‘entertainment’ and ‘technology’ refering to an industry that creates new added value by combining ICT with intellectual property rights (IP) and contents, which are the core values of entertainment.
The newly appointed Visiting Professor Kwon Ji-yong is scheduled to give a special lecture on leadership to undergraduate and graduate students. The purpose is to share his experience and life as a world-class artist to provide KAIST students with vision and insight into the world, as well as the courage and inspiration to pioneer within their own fields of expertise.
In addition, cultural events are planned to be held to help facilitate communication with KAIST members and provide artistic experiences necessary to grow into creative and convergent talents.
Joint research that applies KAIST's various technologies to art and cultural contents will also be pursued. ‘(temporarily named) KAIST-Galaxy Corporation Entertech Research Center’ will be established within the Department of Mechanical Engineering, conducting ▴research on Digital Twin technology for Korean Wave artists, starting with G-Dragon himself ▴convergent research on science and technology encompassing artificial intelligence, robots, and metaverse and K-Culture and ▴research on the development of differentiated avatars of artists using the latest technologies such as volumetrics, motion capture, and haptics.
Galaxy Corporation produces highly talked about televised shows including 'Physical: 100 Season 2', which achieved the feat of ranking first in the Netflix’s ‘Global Top 10 Non-English TV Shows’ category, as well as 'Street Woman Fighter', '2 Days & 1 Night', 'Let's Play Soccer: Mungchyeoya Chanda' and 'Mr. Trot 2', and expanded its IP (intellectual property rights) to all aspects of entertainment, from broadcasting to the music industry by recruiting G-Dragon in December last year.
It is an 'entertech' company that is pioneering a new content market by combining IP with the latest digital technologies such as metaverse, avatar, and artificial intelligence (AI). Based on these achievements, it recently signed a partnership with a global investment bank (IB). Through global investment, the company is soon to be the first entertech startup to become a unicorn (corporate value of 1 trillion won).
Kwon Ji-yong said, “It is an honor to be a visiting professor at KAIST, where countless scientific geniuses come out of. I am hoping the best of science and technology experts and my expertise in the entertainment business will come together and a great synergy, a ‘big bang’ will be ensue as a result.
“More and more musicians are working with artificial intelligence and these cutting-edge technologies enable more diverse forms of creative work,” he continued. He also expressed his specific wish. “Through the AI avatar developed jointly by Galaxy Corporation and KAIST, I wish to communicate more closely with my fans around the world that I cannot meet so often otherwise.”
President Kwang-Hyung Lee said, “Considering that KAIST is a university that has always explored new things and pioneered unknown territories since its establishment, I believe that Kwon Ji-yong also shares KAIST's DNA in that he is a leader and pioneer who has attained world-class achievements in the world of culture and arts.”
President Lee continued expressing his expectations saying, “Kwon Ji-yong will not only contribute to taking KAIST’s science and technology to spread and grow K-culture on the global stage, through his activities but also in sharing his experience and spirit as the trend leader of the world, he will be an asset to the members of KAIST which aims to become a top-tier university.”
The period of Kwon Ji-yong’s professorship is two years from the 4th of this month to June of 2026. In addition, Professor Kwon Ji-yong has been appointed as KAIST’s global ambassador to help strengthen KAIST's international presence.
Professor Kwon Ji-yong, who began his career as G-Dragon, has established himself as an icon symbolizing Korean pop culture over 18 years as a member and the leader of the K-Pop idol group 'Big Bang', which debuted in 2006 and gained global popularity. While being recognized for his outstanding ability in all aspects of his music, from writing lyrics, composing, and producing to performing, he has also been active in fashion, becoming the first Asian man to be selected as a global ambassador for Chanel in 2016, spreading Korean music and fashion to the world.
In June, 2017, he released his 3rd solo album 'Kwon Ji Yong' on USB instead of the existing CD format, for the first time in Korea. He also attended CES, the world's largest home appliance and IT exhibition held in Las Vegas, USA in January of this year, extending his strides as a 'tech-tainer'.
2024.06.05 View 19148 -
 A 20-year-old puzzle solved: KAIST research team reveals the 'three-dimensional vortex' of zero-dimensional ferroelectrics
Materials that can maintain a magnetized state by themselves without an external magnetic field (i.e., permanent magnets) are called ferromagnets. Ferroelectrics can be thought of as the electric counterpart to ferromagnets, as they maintain a polarized state without an external electric field. It is well-known that ferromagnets lose their magnetic properties when reduced to nano sizes below a certain threshold. What happens when ferroelectrics are similarly made extremely small in all directions (i.e., into a zero-dimensional structure such as nanoparticles) has been a topic of controversy for a long time.
< (From left) Professor Yongsoo Yang, the corresponding author, and Chaehwa Jeong, the first author studying in the integrated master’s and doctoral program, of the KAIST Department of Physics >
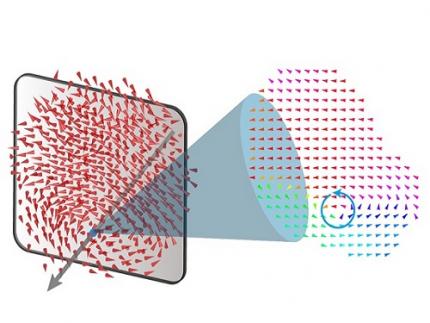
The research team led by Dr. Yongsoo Yang from the Department of Physics at KAIST has, for the first time, experimentally clarified the three-dimensional, vortex-shaped polarization distribution inside ferroelectric nanoparticles through international collaborative research with POSTECH, SNU, KBSI, LBNL and University of Arkansas.
About 20 years ago, Prof. Laurent Bellaiche (currently at University of Arkansas) and his colleagues theoretically predicted that a unique form of polarization distribution, arranged in a toroidal vortex shape, could occur inside ferroelectric nanodots. They also suggested that if this vortex distribution could be properly controlled, it could be applied to ultra-high-density memory devices with capacities over 10,000 times greater than existing ones. However, experimental clarification had not been achieved due to the difficulty of measuring the three-dimensional polarization distribution within ferroelectric nanostructures.
The research team at KAIST successfully solved this 20-year-old challenge by implementing a technique called atomic electron tomography. This technique works by acquiring atomic-resolution transmission electron microscope images of the nanomaterials from multiple tilt angles, and then reconstructing them back into three-dimensional structures using advanced reconstruction algorithms. Electron tomography can be understood as essentially the same method with the CT scans used in hospitals to view internal organs in three dimensions; the KAIST team adapted it uniquely for nanomaterials, utilizing an electron microscope at the single-atom level.
< Figure 1. Three-dimensional polarization distribution of BaTiO3 nanoparticles revealed by atomic electron tomography. >(Left) Schematic of the electron tomography technique, which involves acquiring transmission electron microscope images at multiple tilt angles and reconstructing them into 3D atomic structures.(Center) Experimentally determined three-dimensional polarization distribution inside a BaTiO3 nanoparticle via atomic electron tomography. A vortex-like structure is clearly visible near the bottom (blue dot).(Right) A two-dimensional cross-section of the polarization distribution, thinly sliced at the center of the vortex, with the color and arrows together indicating the direction of the polarization. A distinct vortex structure can be observed.
Using atomic electron tomography, the team completely measured the positions of cation atoms inside barium titanate (BaTiO3) nanoparticles, a well-known ferroelectric material, in three dimensions. From the precisely determined 3D atomic arrangements, they were able to further calculate the internal three-dimensional polarization distribution at the single-atom level. The analysis of the polarization distribution revealed, for the first time experimentally, that topological polarization orderings including vortices, anti-vortices, skyrmions, and a Bloch point occur inside the 0-dimensional ferroelectrics, as theoretically predicted 20 years ago. Furthermore, it was also found that the number of internal vortices can be controlled depending on their sizes.
Prof. Sergey Prosandeev and Prof. Bellaiche (who proposed with other co-workers the polar vortex ordering theoretically 20 years ago), joined this collaboration and further proved that the vortex distribution results obtained from experiments are consistent with theoretical calculations.
By controlling the number and orientation of these polarization distributions, it is expected that this can be utilized into next-generation high-density memory device that can store more than 10,000 times the amount of information in the same-sized device compared to existing ones.
Dr. Yang, who led the research, explained the significance of the results: “This result suggests that controlling the size and shape of ferroelectrics alone, without needing to tune the substrate or surrounding environmental effects such as epitaxial strain, can manipulate ferroelectric vortices or other topological orderings at the nano-scale. Further research could then be applied to the development of next-generation ultra-high-density memory.”
This research, with Chaehwa Jeong from the Department of Physics at KAIST as the first author, was published online in Nature Communications on May 8th (Title: Revealing the Three-Dimensional Arrangement of Polar Topology in Nanoparticles).
The study was mainly supported by the National Research Foundation of Korea (NRF) Grants funded by the Korean Government (MSIT).
2024.05.31 View 7705
A 20-year-old puzzle solved: KAIST research team reveals the 'three-dimensional vortex' of zero-dimensional ferroelectrics
Materials that can maintain a magnetized state by themselves without an external magnetic field (i.e., permanent magnets) are called ferromagnets. Ferroelectrics can be thought of as the electric counterpart to ferromagnets, as they maintain a polarized state without an external electric field. It is well-known that ferromagnets lose their magnetic properties when reduced to nano sizes below a certain threshold. What happens when ferroelectrics are similarly made extremely small in all directions (i.e., into a zero-dimensional structure such as nanoparticles) has been a topic of controversy for a long time.
< (From left) Professor Yongsoo Yang, the corresponding author, and Chaehwa Jeong, the first author studying in the integrated master’s and doctoral program, of the KAIST Department of Physics >
The research team led by Dr. Yongsoo Yang from the Department of Physics at KAIST has, for the first time, experimentally clarified the three-dimensional, vortex-shaped polarization distribution inside ferroelectric nanoparticles through international collaborative research with POSTECH, SNU, KBSI, LBNL and University of Arkansas.
About 20 years ago, Prof. Laurent Bellaiche (currently at University of Arkansas) and his colleagues theoretically predicted that a unique form of polarization distribution, arranged in a toroidal vortex shape, could occur inside ferroelectric nanodots. They also suggested that if this vortex distribution could be properly controlled, it could be applied to ultra-high-density memory devices with capacities over 10,000 times greater than existing ones. However, experimental clarification had not been achieved due to the difficulty of measuring the three-dimensional polarization distribution within ferroelectric nanostructures.
The research team at KAIST successfully solved this 20-year-old challenge by implementing a technique called atomic electron tomography. This technique works by acquiring atomic-resolution transmission electron microscope images of the nanomaterials from multiple tilt angles, and then reconstructing them back into three-dimensional structures using advanced reconstruction algorithms. Electron tomography can be understood as essentially the same method with the CT scans used in hospitals to view internal organs in three dimensions; the KAIST team adapted it uniquely for nanomaterials, utilizing an electron microscope at the single-atom level.
< Figure 1. Three-dimensional polarization distribution of BaTiO3 nanoparticles revealed by atomic electron tomography. >(Left) Schematic of the electron tomography technique, which involves acquiring transmission electron microscope images at multiple tilt angles and reconstructing them into 3D atomic structures.(Center) Experimentally determined three-dimensional polarization distribution inside a BaTiO3 nanoparticle via atomic electron tomography. A vortex-like structure is clearly visible near the bottom (blue dot).(Right) A two-dimensional cross-section of the polarization distribution, thinly sliced at the center of the vortex, with the color and arrows together indicating the direction of the polarization. A distinct vortex structure can be observed.
Using atomic electron tomography, the team completely measured the positions of cation atoms inside barium titanate (BaTiO3) nanoparticles, a well-known ferroelectric material, in three dimensions. From the precisely determined 3D atomic arrangements, they were able to further calculate the internal three-dimensional polarization distribution at the single-atom level. The analysis of the polarization distribution revealed, for the first time experimentally, that topological polarization orderings including vortices, anti-vortices, skyrmions, and a Bloch point occur inside the 0-dimensional ferroelectrics, as theoretically predicted 20 years ago. Furthermore, it was also found that the number of internal vortices can be controlled depending on their sizes.
Prof. Sergey Prosandeev and Prof. Bellaiche (who proposed with other co-workers the polar vortex ordering theoretically 20 years ago), joined this collaboration and further proved that the vortex distribution results obtained from experiments are consistent with theoretical calculations.
By controlling the number and orientation of these polarization distributions, it is expected that this can be utilized into next-generation high-density memory device that can store more than 10,000 times the amount of information in the same-sized device compared to existing ones.
Dr. Yang, who led the research, explained the significance of the results: “This result suggests that controlling the size and shape of ferroelectrics alone, without needing to tune the substrate or surrounding environmental effects such as epitaxial strain, can manipulate ferroelectric vortices or other topological orderings at the nano-scale. Further research could then be applied to the development of next-generation ultra-high-density memory.”
This research, with Chaehwa Jeong from the Department of Physics at KAIST as the first author, was published online in Nature Communications on May 8th (Title: Revealing the Three-Dimensional Arrangement of Polar Topology in Nanoparticles).
The study was mainly supported by the National Research Foundation of Korea (NRF) Grants funded by the Korean Government (MSIT).
2024.05.31 View 7705 -
 KAIST and Merck Sign MOU to Boost Biotech Innovation
< (From left) KAIST President Kwang-Hyung Lee and Merck CEO Matthias Heinzel >
KAIST (President Kwang-Hyung Lee) signed a Memorandum of Understanding (MOU) with Merck Life Science (CEO Matthias Heinzel) on May 29 to foster innovation and technology creation in advanced biotechnology.
Since May of last year, the two institutions have been discussing multidimensional innovation programs and will now focus on industry-academia cooperation to tackle bioindustry challenges with this MOU as a foundation.
KAIST will conduct joint research projects in various advanced biotechnology fields, such as synthetic biology, mRNA, cell line engineering, and organoids, using the chemical and biological portfolios provided by Merck.
Additionally, KAIST will establish an Experience Lab in collaboration with the Department of Materials Science and Engineering and the Graduate School of Medical Science and Engineering. This lab will support the discovery and analysis of candidate substances in materials science and biology.
Programs to enhance researchers' capabilities will also be offered. Scholarships for graduate students and awards for professors will be implemented. Researchers will have opportunities to participate in global academic events and educational programs hosted by Merck, such as the Curious 2024 Future Insight Conference and the Innovation Cup.
M Ventures, a venture capital subsidiary of Merck Group, will collaborate with KAIST's startup institute to support technology commercialization and continue to develop their startup ecosystem.
The signing ceremony at KAIST's main campus in Daejeon was attended by the CEO of Merck Life Science and the President of KAIST along with representatives from both institutions.
Matthias Heinzel, a member of the Executive Board of Merck and CEO Life Science, said, “This agreement with KAIST is a significant step toward accelerating the development of the life science industry both in Korea and globally. Advancing life science research and fostering the next generation of scientists is essential for discovering new medicines to meet global health needs.”
President Kwang-Hyung Lee responded, “We are pleased to share a vision for scientific advancement with Merck, a leading global technology company. We anticipate that this partnership will strengthen the connection between Merck’s life science business and the global scientific community.”
In March, Merck, a global science and technology company with over 350 years of history, announced a plan to invest 430 billion KRW (€300 million) to build a bioprocessing center in Daejeon, where KAIST is located. This is Merck's largest investment in the Asia-Pacific region.
2024.05.30 View 7867
KAIST and Merck Sign MOU to Boost Biotech Innovation
< (From left) KAIST President Kwang-Hyung Lee and Merck CEO Matthias Heinzel >
KAIST (President Kwang-Hyung Lee) signed a Memorandum of Understanding (MOU) with Merck Life Science (CEO Matthias Heinzel) on May 29 to foster innovation and technology creation in advanced biotechnology.
Since May of last year, the two institutions have been discussing multidimensional innovation programs and will now focus on industry-academia cooperation to tackle bioindustry challenges with this MOU as a foundation.
KAIST will conduct joint research projects in various advanced biotechnology fields, such as synthetic biology, mRNA, cell line engineering, and organoids, using the chemical and biological portfolios provided by Merck.
Additionally, KAIST will establish an Experience Lab in collaboration with the Department of Materials Science and Engineering and the Graduate School of Medical Science and Engineering. This lab will support the discovery and analysis of candidate substances in materials science and biology.
Programs to enhance researchers' capabilities will also be offered. Scholarships for graduate students and awards for professors will be implemented. Researchers will have opportunities to participate in global academic events and educational programs hosted by Merck, such as the Curious 2024 Future Insight Conference and the Innovation Cup.
M Ventures, a venture capital subsidiary of Merck Group, will collaborate with KAIST's startup institute to support technology commercialization and continue to develop their startup ecosystem.
The signing ceremony at KAIST's main campus in Daejeon was attended by the CEO of Merck Life Science and the President of KAIST along with representatives from both institutions.
Matthias Heinzel, a member of the Executive Board of Merck and CEO Life Science, said, “This agreement with KAIST is a significant step toward accelerating the development of the life science industry both in Korea and globally. Advancing life science research and fostering the next generation of scientists is essential for discovering new medicines to meet global health needs.”
President Kwang-Hyung Lee responded, “We are pleased to share a vision for scientific advancement with Merck, a leading global technology company. We anticipate that this partnership will strengthen the connection between Merck’s life science business and the global scientific community.”
In March, Merck, a global science and technology company with over 350 years of history, announced a plan to invest 430 billion KRW (€300 million) to build a bioprocessing center in Daejeon, where KAIST is located. This is Merck's largest investment in the Asia-Pacific region.
2024.05.30 View 7867 -
 Novel High-performance and Sustainable Paper Coating Material created by KAIST-Yonsei University Research Team to reduce microplastic pollution
What if there is a biodegradable packaging material with high performance without leaving microplastics?
Plastic pollution presents a global challenge that must be solved. In particular, packaging accounts for 30-50% of the total plastic consumption. While paper packaging is eco-friendly, it lacks crucial functionalities like moisture resistance and strength. Traditional coating materials exacerbate plastic pollution, prompting the need for sustainable alternatives.
Polyethylene (PE) and ethylene vinyl alcohol (EVOH) are typically used as coating materials to improve the low barrier properties of paper packaging, but these substances do not decompose and worsen microplastic pollution when disposed of in the natural environment. In response to this problem, packaging materials made from bio-based substances and biodegradable plastics have been developed, but in most cases, as the packaging performance improves, the biodegradability diminishes rapidly.
KAIST announced that a joint research team led by Professor Jaewook Myung of the Department of Civil and Environmental Engineering, Professor Hanseul Yang of the Department of Life Sciences, and Professor Jongcheol Seo of the Department of Packaging and Logistics <Figure 4. Back cover art of Green Chemistry journal of the latest volume, describing the boric acid cross-linked poly(vinyl alcohol) coated paper featuring marine biodegradability, biocompatibility, high barrier properties, and robustness developed through this study.>
at Yonsei University tackled the challenge of balancing packaging performance and sustainability. They successfully developed a sustainable, marine biodegradable, high-performance paper coating material.
* Biodegradable plastic: A plastic that can be decomposed by microorganisms in natural environments such as soil and ocean or artificial conditions such as industrial composting and anaerobic digestion by microorganisms.
*Microplastics: Tiny pieces of plastic less than 5 mm, produced during the decomposition of bulk plastic materials. Microplastics can persist in the sea for more than decades, causing severe marine pollution.
The team utilized boric acid-crosslinked poly(vinyl alcohol) (PVA), a biodegradable plastic, to coat the paper, thereby enhancing its biodegradability, barrier properties, and strength. The resulting coated paper exhibited superior performance compared to conventional plastics, with excellent barrier properties and physical strength, even in humid conditions.
<Figure 1. (a) Chemical structure of boric acid-crosslinked poly(vinyl alcohol) coating on paper, (b-c) Oxygen and water vapor barrier properties, (d-f) Tensile strength in dry and moist conditions. OTR: Oxygen transmission rate, WVTR: Water vapor transmission rate.>
The team also conducted an in-depth examination of biodegradation and biocompatibility to systematically evaluate the sustainability of the newly developed coated paper. Biodegradation was assessed by simulating the marine environment, known for its challenging biodegradability conditions. The team employed a respiratory system-based bioreactor to measure the degree of carbon mineralization into carbon dioxide. After 111 days of biodegradation, it was found that the coated papers achieved 59-82% biodegradation depending on the coating component. The phenomenon in which marine bacteria are decomposing the coating material was captured through a scanning electron microscope. In addition, in vitro biocompatibility was confirmed through human embryonic kidney and mouse embryonic fibroblast cells, as well as high in-vivo biocompatibility of the coated paper was verified through mouse experiments.
Through this study, the joint research team proposed a coating strategy that can improve packaging performance while upholding sustainability to address the drawbacks of paper packaging. The boric acid-crosslinked PVA-coated paper eliminates the need for artificial composting conditions or sewage treatment facilities. Being biodegradable in natural environments and characterized by low toxicity, this newly coated paper does not exacerbate environmental pollution when accidentally discarded. Thus, it presents a sustainable substitute for plastic packaging materials.
<Figure 2. (a) Normal paper and boric acid-crosslinked poly(vinyl alcohol) coated paper, (b) Biodegradation of the coated paper by marine bacteria, (c) Result of cytotoxicity test using human embryonic kidney and mouse embryonic fibroblast cells. (d) Vital organs after one-month exposure of the coated papers to mice.>
Professor Jaewook Myung at KAIST, who led the sustainability study of coated paper, said, "The development of a marine biodegradable high-performance paper coating is the result of combining the innovative technologies of three leading research teams in each field." He said, “We will continue to develop sustainable materials with excellent performance.” Meanwhile, Professor Jongchul Seo of Yonsei University, who led the research on the development of high-performance paper coating, mentioned, “Through this research, we have developed a sustainable paper packaging technology that can replace non-degradable plastic packaging, and we expect the research outcome will be applied in industry,”.
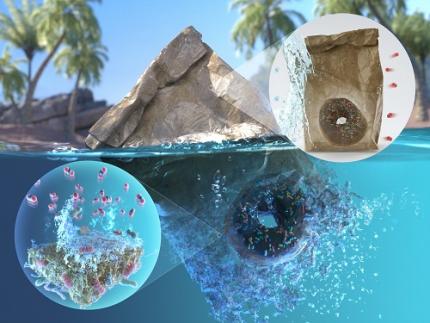
<Figure 3. End-of-life scenario of papers coated by BA-crosslinked PVA in the marine environment. The coated papers potentially be disintegrated by marine microorganisms and ocean waves and tides. The depolymerization of PVA coating and paper is then mediated by extracellular depolymerases such as oxidases and cellulases, after which the small subunits (oligomers and monomers) are assimilated by microbial cells. The carbon components in the coated papers are ultimately mineralized into CO2, posing no harm in the ocean.>
The work was published in Green Chemistry and Food Chemistry journals. This study was conducted with the support of the Korea Research Foundation and the Korea Institute for Agriculture, Food and Rural Affairs Technology Planning and Evaluation, etc.
*Title of paper published in Green Chemistry: Boric acid-crosslinked poly(vinyl alcohol): biodegradable, biocompatible, robust, and high-barrier paper coating
※ Selected as the article for the back cover of the journal .
- Authors: Shinhyeong Choe, Seulki You, Kitae Park, Youngju Kim, Jehee Park, Yongjun Cho, Jongchul Seo, Hanseul Yang, and Jaewook Myung)
- Date: April 17, 2024
- DOI: 10.1039/D4GC00618F
*Title of paper published in Food Chemistry: Effect of epichlorohydrin treatment on the coating process and performance of high-barrier paper packaging
- Authors: Kitae Park, Shinhyeong Choe, Kambiz Sadeghi, Pradeep Kumar Panda, Jaewook Myung, Dowan Kim, and Jongchul Seo
- Date: February 19, 2024
- DOI: 10.1016/j.foodchem.2024.138772
<Figure 4. Back cover art of Green Chemistry journal of the latest volume, describing the boric acid cross-linked poly(vinyl alcohol) coated paper featuring marine biodegradability, biocompatibility, high barrier properties, and robustness developed through this study.>
2024.05.22 View 8241
Novel High-performance and Sustainable Paper Coating Material created by KAIST-Yonsei University Research Team to reduce microplastic pollution
What if there is a biodegradable packaging material with high performance without leaving microplastics?
Plastic pollution presents a global challenge that must be solved. In particular, packaging accounts for 30-50% of the total plastic consumption. While paper packaging is eco-friendly, it lacks crucial functionalities like moisture resistance and strength. Traditional coating materials exacerbate plastic pollution, prompting the need for sustainable alternatives.
Polyethylene (PE) and ethylene vinyl alcohol (EVOH) are typically used as coating materials to improve the low barrier properties of paper packaging, but these substances do not decompose and worsen microplastic pollution when disposed of in the natural environment. In response to this problem, packaging materials made from bio-based substances and biodegradable plastics have been developed, but in most cases, as the packaging performance improves, the biodegradability diminishes rapidly.
KAIST announced that a joint research team led by Professor Jaewook Myung of the Department of Civil and Environmental Engineering, Professor Hanseul Yang of the Department of Life Sciences, and Professor Jongcheol Seo of the Department of Packaging and Logistics <Figure 4. Back cover art of Green Chemistry journal of the latest volume, describing the boric acid cross-linked poly(vinyl alcohol) coated paper featuring marine biodegradability, biocompatibility, high barrier properties, and robustness developed through this study.>
at Yonsei University tackled the challenge of balancing packaging performance and sustainability. They successfully developed a sustainable, marine biodegradable, high-performance paper coating material.
* Biodegradable plastic: A plastic that can be decomposed by microorganisms in natural environments such as soil and ocean or artificial conditions such as industrial composting and anaerobic digestion by microorganisms.
*Microplastics: Tiny pieces of plastic less than 5 mm, produced during the decomposition of bulk plastic materials. Microplastics can persist in the sea for more than decades, causing severe marine pollution.
The team utilized boric acid-crosslinked poly(vinyl alcohol) (PVA), a biodegradable plastic, to coat the paper, thereby enhancing its biodegradability, barrier properties, and strength. The resulting coated paper exhibited superior performance compared to conventional plastics, with excellent barrier properties and physical strength, even in humid conditions.
<Figure 1. (a) Chemical structure of boric acid-crosslinked poly(vinyl alcohol) coating on paper, (b-c) Oxygen and water vapor barrier properties, (d-f) Tensile strength in dry and moist conditions. OTR: Oxygen transmission rate, WVTR: Water vapor transmission rate.>
The team also conducted an in-depth examination of biodegradation and biocompatibility to systematically evaluate the sustainability of the newly developed coated paper. Biodegradation was assessed by simulating the marine environment, known for its challenging biodegradability conditions. The team employed a respiratory system-based bioreactor to measure the degree of carbon mineralization into carbon dioxide. After 111 days of biodegradation, it was found that the coated papers achieved 59-82% biodegradation depending on the coating component. The phenomenon in which marine bacteria are decomposing the coating material was captured through a scanning electron microscope. In addition, in vitro biocompatibility was confirmed through human embryonic kidney and mouse embryonic fibroblast cells, as well as high in-vivo biocompatibility of the coated paper was verified through mouse experiments.
Through this study, the joint research team proposed a coating strategy that can improve packaging performance while upholding sustainability to address the drawbacks of paper packaging. The boric acid-crosslinked PVA-coated paper eliminates the need for artificial composting conditions or sewage treatment facilities. Being biodegradable in natural environments and characterized by low toxicity, this newly coated paper does not exacerbate environmental pollution when accidentally discarded. Thus, it presents a sustainable substitute for plastic packaging materials.
<Figure 2. (a) Normal paper and boric acid-crosslinked poly(vinyl alcohol) coated paper, (b) Biodegradation of the coated paper by marine bacteria, (c) Result of cytotoxicity test using human embryonic kidney and mouse embryonic fibroblast cells. (d) Vital organs after one-month exposure of the coated papers to mice.>
Professor Jaewook Myung at KAIST, who led the sustainability study of coated paper, said, "The development of a marine biodegradable high-performance paper coating is the result of combining the innovative technologies of three leading research teams in each field." He said, “We will continue to develop sustainable materials with excellent performance.” Meanwhile, Professor Jongchul Seo of Yonsei University, who led the research on the development of high-performance paper coating, mentioned, “Through this research, we have developed a sustainable paper packaging technology that can replace non-degradable plastic packaging, and we expect the research outcome will be applied in industry,”.
<Figure 3. End-of-life scenario of papers coated by BA-crosslinked PVA in the marine environment. The coated papers potentially be disintegrated by marine microorganisms and ocean waves and tides. The depolymerization of PVA coating and paper is then mediated by extracellular depolymerases such as oxidases and cellulases, after which the small subunits (oligomers and monomers) are assimilated by microbial cells. The carbon components in the coated papers are ultimately mineralized into CO2, posing no harm in the ocean.>
The work was published in Green Chemistry and Food Chemistry journals. This study was conducted with the support of the Korea Research Foundation and the Korea Institute for Agriculture, Food and Rural Affairs Technology Planning and Evaluation, etc.
*Title of paper published in Green Chemistry: Boric acid-crosslinked poly(vinyl alcohol): biodegradable, biocompatible, robust, and high-barrier paper coating
※ Selected as the article for the back cover of the journal .
- Authors: Shinhyeong Choe, Seulki You, Kitae Park, Youngju Kim, Jehee Park, Yongjun Cho, Jongchul Seo, Hanseul Yang, and Jaewook Myung)
- Date: April 17, 2024
- DOI: 10.1039/D4GC00618F
*Title of paper published in Food Chemistry: Effect of epichlorohydrin treatment on the coating process and performance of high-barrier paper packaging
- Authors: Kitae Park, Shinhyeong Choe, Kambiz Sadeghi, Pradeep Kumar Panda, Jaewook Myung, Dowan Kim, and Jongchul Seo
- Date: February 19, 2024
- DOI: 10.1016/j.foodchem.2024.138772
<Figure 4. Back cover art of Green Chemistry journal of the latest volume, describing the boric acid cross-linked poly(vinyl alcohol) coated paper featuring marine biodegradability, biocompatibility, high barrier properties, and robustness developed through this study.>
2024.05.22 View 8241 -
 KAIST begins full-scale cooperation with Taiwan’s Formosa Group
< (From left) Senior Vice President for Planning and Budget Kyung-Soo Kim, and Professor Minee Choi of the Department of Brain and Cognitive Sciences of KAIST along with Chairman of Formosa Group Sandy Wang and KAIST President Kwang-Hyung Lee, and Dean Daesoo Kim of KAIST College of Life Science and Bioengineering >
KAIST is pursuing cooperation in the fields of advanced biotechnology and eco-friendly energy with Formosa Plastics Group, one of Taiwan's three largest companies.
To this end, Chairman Sandy Wang, a member of Formosa Group's standing committee and leader of the group's bio and eco-friendly energy sector, will visit KAIST on the 13th of this month. This is the first time that the owner of Formosa Group has made an official visit to KAIST.
Cooperation between the two institutions began last March when our university signed a memorandum of understanding on comprehensive exchange and cooperation with Ming Chi University of Science and Technology (明志科技大學), Chang Gung University(長庚大學), and Chang Gung Memorial Hospital(長庚記念醫院), three of many institutions established and supported by Formosa Group.
Based on this, Chairman Sandy Wang, who visits our university to promote more exchanges and cooperation, talked about ‘the education of children and corporate social return and practice of his father, Chairman Yung-Ching Wang,’ through a special lecture for the school leadership as a part of the Monthly Lecture on KAIST’s Leadership Innovation Day.
She then visited KAIST's research and engineering facilities related to Taiwan's future industries, such as advanced biotechnology and eco-friendly energy, and discussed global industry-academic cooperation plans. In the future, the two organizations plan to appoint adjunct professors and promote practical global cooperation, including joint student guidance and research cooperation. We plan to pursue effective mid- to long-term cooperation, such as conducting battery application research with the KAIST Next-Generation ESS Research Center and opening a graduate program specialized in stem cell and gene editing technology in connection with Chang Gung University and Chang Gung Memorial Hospital. The newly established cooperative relationship will also promote Formosa Group's investment and cooperation with KAIST's outstanding venture companies related to bio and eco-friendly energy to lay the foundation for innovative industrial cooperation between Taiwan and Korea.
President Kwang-Hyung Lee said, “The Formosa Group has a global network, so we regard it to be a key partner that will position KAIST’s bio and engineering technology in the global stages.” He also said, “With Chairman Sandy Wang’s visit, Taiwan is emerging as a global economic powerhouse,” and added, “We expect to continue our close cooperative relationship with the company.”
Formosa Group is a company founded by the late Chairman Yung-Ching Wang, the father of Chairman Sandy Wang. As the world's No. 1 plastic PVC producer, it is leading the core industries of Taiwan's economy, including semiconductors, steel, heavy industry, bio, and batteries. Chairman Yung-Ching Wang was respected by the Taiwanese people by setting an example of returning his wealth to society under the belief that the companies and assets he built ‘belonged to the people.’ Chang Gung University, Chang Gung Memorial Hospital, and Ming Chi University of Technology, which are pursuing cooperation with our university, were also established as part of the social contribution promoted by Chairman Yung-Ching Wang and are receiving financial support from Formosa Group.
2024.05.09 View 6768
KAIST begins full-scale cooperation with Taiwan’s Formosa Group
< (From left) Senior Vice President for Planning and Budget Kyung-Soo Kim, and Professor Minee Choi of the Department of Brain and Cognitive Sciences of KAIST along with Chairman of Formosa Group Sandy Wang and KAIST President Kwang-Hyung Lee, and Dean Daesoo Kim of KAIST College of Life Science and Bioengineering >
KAIST is pursuing cooperation in the fields of advanced biotechnology and eco-friendly energy with Formosa Plastics Group, one of Taiwan's three largest companies.
To this end, Chairman Sandy Wang, a member of Formosa Group's standing committee and leader of the group's bio and eco-friendly energy sector, will visit KAIST on the 13th of this month. This is the first time that the owner of Formosa Group has made an official visit to KAIST.
Cooperation between the two institutions began last March when our university signed a memorandum of understanding on comprehensive exchange and cooperation with Ming Chi University of Science and Technology (明志科技大學), Chang Gung University(長庚大學), and Chang Gung Memorial Hospital(長庚記念醫院), three of many institutions established and supported by Formosa Group.
Based on this, Chairman Sandy Wang, who visits our university to promote more exchanges and cooperation, talked about ‘the education of children and corporate social return and practice of his father, Chairman Yung-Ching Wang,’ through a special lecture for the school leadership as a part of the Monthly Lecture on KAIST’s Leadership Innovation Day.
She then visited KAIST's research and engineering facilities related to Taiwan's future industries, such as advanced biotechnology and eco-friendly energy, and discussed global industry-academic cooperation plans. In the future, the two organizations plan to appoint adjunct professors and promote practical global cooperation, including joint student guidance and research cooperation. We plan to pursue effective mid- to long-term cooperation, such as conducting battery application research with the KAIST Next-Generation ESS Research Center and opening a graduate program specialized in stem cell and gene editing technology in connection with Chang Gung University and Chang Gung Memorial Hospital. The newly established cooperative relationship will also promote Formosa Group's investment and cooperation with KAIST's outstanding venture companies related to bio and eco-friendly energy to lay the foundation for innovative industrial cooperation between Taiwan and Korea.
President Kwang-Hyung Lee said, “The Formosa Group has a global network, so we regard it to be a key partner that will position KAIST’s bio and engineering technology in the global stages.” He also said, “With Chairman Sandy Wang’s visit, Taiwan is emerging as a global economic powerhouse,” and added, “We expect to continue our close cooperative relationship with the company.”
Formosa Group is a company founded by the late Chairman Yung-Ching Wang, the father of Chairman Sandy Wang. As the world's No. 1 plastic PVC producer, it is leading the core industries of Taiwan's economy, including semiconductors, steel, heavy industry, bio, and batteries. Chairman Yung-Ching Wang was respected by the Taiwanese people by setting an example of returning his wealth to society under the belief that the companies and assets he built ‘belonged to the people.’ Chang Gung University, Chang Gung Memorial Hospital, and Ming Chi University of Technology, which are pursuing cooperation with our university, were also established as part of the social contribution promoted by Chairman Yung-Ching Wang and are receiving financial support from Formosa Group.
2024.05.09 View 6768 -
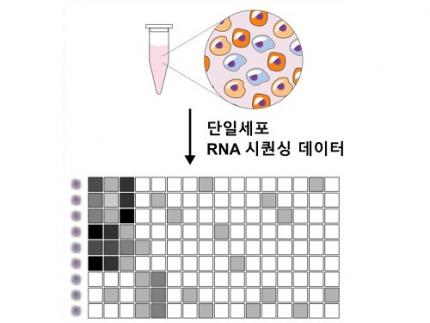 Revolutionary 'scLENS' Unveiled to Decode Complex Single-Cell Genomic Data
Unlocking biological information from complex single-cell genomic data has just become easier and more precise, thanks to the innovative 'scLENS' tool developed by the Biomedical Mathematics Group within the IBS Center for Mathematical and Computational Sciences led by Chief Investigator Jae Kyoung Kim, who is also a professor at KAIST. This new finding represents a significant leap forward in the field of single-cell transcriptomics.
Single-cell genomic analysis is an advanced technique that measures gene expression at the individual cell level, revealing cellular changes and interactions that are not observable with traditional genomic analysis methods. When applied to cancer tissues, this analysis can delineate the composition of diverse cell types within a tumor, providing insights into how cancer progresses and identifying key genes involved during each stage of progression.
Despite the immense potential of single-cell genomic analysis, handling the vast amount of data that it generates has always been challenging. The amount of data covers the expression of tens of thousands of genes across hundreds to thousands of individual cells. This not only results in large datasets but also introduces noise-related distortions, which arise in part due to current measurement limitations.
< Figure 1. Overview of scLENS (single-cell Low-dimensional embedding using the effective Noise Subtract) >
(Left) Current dimensionality reduction methods for scRNA-seq data involve conventional data preprocessing steps, such as log normalization, followed by manual selection of signals from the scaled data. However, this study reveals that the high levels of sparsity and variability in scRNA-seq data can lead to signal distortion during the data preprocessing, compromising the accuracy of downstream analyses.
(Right) To address this issue, the researchers integrated L2 normalization into the conventional preprocessing pipeline, effectively mitigating signal distortion. Moreover, they developed a novel signal detection algorithm that eliminates the need for user intervention by leveraging random matrix theory-based noise filtering and signal robustness testing. By incorporating these techniques, scLENS enables accurate and automated analysis of scRNA-seq data, overcoming the limitations of existing dimensionality reduction methods.
Corresponding author Jae Kyoung Kim highlighted, “There has been a remarkable advancement in experimental technologies for analyzing single-cell transcriptomes over the past decade. However, due to limitations in data analysis methods, there has been a struggle to fully utilize valuable data obtained through extensive cost and time."
Researchers have developed numerous analysis methods over the years to discern biological signals from this noise. However, the accuracy of these methods has been less than satisfactory. A critical issue is that determining signal and noise thresholds often depends on subjective decisions from the users.
The newly developed scLENS tool harnesses Random Matrix Theory and Signal robustness test to automatically differentiate signals from noise without relying on subjective user input.
First author Hyun Kim stated, "Previously, users had to arbitrarily decide the threshold for signal and noise, which compromised the reproducibility of analysis results and introduced subjectivity. scLENS eliminates this problem by automatically detecting signals using only the inherent structure of the data."
During the development of scLENS, researchers identified the fundamental reasons for inaccuracies in existing analysis methods. They found that commonly used data preprocessing methods distort both biological signals and noise. The new preprocessing approach that scLENS offers is free from such distortions.
By resolving issues related to noise threshold determined by subjective user choice and signal distortion in conventional data preprocessing, scLENS significantly outperforms existing methods in accuracy. Additionally, scLENS automates the laborious process of signal dimension selection, allowing researchers to extract biological signals conveniently and automatically.
CI Kim added, "scLENS solves major issues in single-cell transcriptome data analysis, substantially improving the accuracy and efficiency throughout the analysis process. This is a prime example of how fundamental mathematical theories can drive innovation in life sciences research, allowing researchers to more quickly and accurately answer biological questions and uncover secrets of life that were previously hidden."
This research was published in the international journal 'Nature Communications' on April 27.
Terminology
* Single-cell RNA sequencing (scRNA-seq): A technique used to measure gene expression levels in individual cells, providing insights into cell heterogeneity and rare cell types.
* Dimensionality reduction: A method to reduce the number of features or variables in a dataset while preserving the most important information, making data analysis more manageable and interpretable.
* Random matrix theory: A mathematical framework used to model and analyze the properties of large, random matrices, which can be applied to filter out noise in high-dimensional data.
* Signal robustness test: Among the signals, this test selects signals that are robust to the slight perturbation in data because real biological signals should be invariant for such slight modification in the data.
2024.05.09 View 6126
Revolutionary 'scLENS' Unveiled to Decode Complex Single-Cell Genomic Data
Unlocking biological information from complex single-cell genomic data has just become easier and more precise, thanks to the innovative 'scLENS' tool developed by the Biomedical Mathematics Group within the IBS Center for Mathematical and Computational Sciences led by Chief Investigator Jae Kyoung Kim, who is also a professor at KAIST. This new finding represents a significant leap forward in the field of single-cell transcriptomics.
Single-cell genomic analysis is an advanced technique that measures gene expression at the individual cell level, revealing cellular changes and interactions that are not observable with traditional genomic analysis methods. When applied to cancer tissues, this analysis can delineate the composition of diverse cell types within a tumor, providing insights into how cancer progresses and identifying key genes involved during each stage of progression.
Despite the immense potential of single-cell genomic analysis, handling the vast amount of data that it generates has always been challenging. The amount of data covers the expression of tens of thousands of genes across hundreds to thousands of individual cells. This not only results in large datasets but also introduces noise-related distortions, which arise in part due to current measurement limitations.
< Figure 1. Overview of scLENS (single-cell Low-dimensional embedding using the effective Noise Subtract) >
(Left) Current dimensionality reduction methods for scRNA-seq data involve conventional data preprocessing steps, such as log normalization, followed by manual selection of signals from the scaled data. However, this study reveals that the high levels of sparsity and variability in scRNA-seq data can lead to signal distortion during the data preprocessing, compromising the accuracy of downstream analyses.
(Right) To address this issue, the researchers integrated L2 normalization into the conventional preprocessing pipeline, effectively mitigating signal distortion. Moreover, they developed a novel signal detection algorithm that eliminates the need for user intervention by leveraging random matrix theory-based noise filtering and signal robustness testing. By incorporating these techniques, scLENS enables accurate and automated analysis of scRNA-seq data, overcoming the limitations of existing dimensionality reduction methods.
Corresponding author Jae Kyoung Kim highlighted, “There has been a remarkable advancement in experimental technologies for analyzing single-cell transcriptomes over the past decade. However, due to limitations in data analysis methods, there has been a struggle to fully utilize valuable data obtained through extensive cost and time."
Researchers have developed numerous analysis methods over the years to discern biological signals from this noise. However, the accuracy of these methods has been less than satisfactory. A critical issue is that determining signal and noise thresholds often depends on subjective decisions from the users.
The newly developed scLENS tool harnesses Random Matrix Theory and Signal robustness test to automatically differentiate signals from noise without relying on subjective user input.
First author Hyun Kim stated, "Previously, users had to arbitrarily decide the threshold for signal and noise, which compromised the reproducibility of analysis results and introduced subjectivity. scLENS eliminates this problem by automatically detecting signals using only the inherent structure of the data."
During the development of scLENS, researchers identified the fundamental reasons for inaccuracies in existing analysis methods. They found that commonly used data preprocessing methods distort both biological signals and noise. The new preprocessing approach that scLENS offers is free from such distortions.
By resolving issues related to noise threshold determined by subjective user choice and signal distortion in conventional data preprocessing, scLENS significantly outperforms existing methods in accuracy. Additionally, scLENS automates the laborious process of signal dimension selection, allowing researchers to extract biological signals conveniently and automatically.
CI Kim added, "scLENS solves major issues in single-cell transcriptome data analysis, substantially improving the accuracy and efficiency throughout the analysis process. This is a prime example of how fundamental mathematical theories can drive innovation in life sciences research, allowing researchers to more quickly and accurately answer biological questions and uncover secrets of life that were previously hidden."
This research was published in the international journal 'Nature Communications' on April 27.
Terminology
* Single-cell RNA sequencing (scRNA-seq): A technique used to measure gene expression levels in individual cells, providing insights into cell heterogeneity and rare cell types.
* Dimensionality reduction: A method to reduce the number of features or variables in a dataset while preserving the most important information, making data analysis more manageable and interpretable.
* Random matrix theory: A mathematical framework used to model and analyze the properties of large, random matrices, which can be applied to filter out noise in high-dimensional data.
* Signal robustness test: Among the signals, this test selects signals that are robust to the slight perturbation in data because real biological signals should be invariant for such slight modification in the data.
2024.05.09 View 6126 -
 Dr. Bong-Joon Jung Elected as Interim President of KAIST U.S. Alumni Association
On April 29th, 2024, the Office of Global Initiative at KAIST, led by Vice President Man-Sung Yim, successfully conducted the election for the interim president of the KAIST U.S. Alumni Association. The authority to organize and operate the election was delegated by the KAIST U.S. Alumni Interim President Selection Committee Foundation, consisting of Je Woo Kim, Director of KAIST U.S. Foundation; Terri Kim, Director of KAIST U.S. Foundation; and Myungjin Yim, President of the KAIST Silicon Valley Alumni Association.
The election was announced during the KAIST Online U.S. Alumni Event held on December 8th, 2023, with the aim of establishing interim executive principles for six months and ultimately forming the official executive body of the KAIST U.S. Alumni Association.
The election was conducted according to the requirements set by the KAIST U.S. Alumni Interim President Selection Committee Foundation, which stated that "if there is a single candidate, they will be elected if they receive more than half of the votes from participating voters." The voting period lasted from April 13th (Monday) to April 24th (Friday) and was specifically directed towards KAIST alumni living in the Americas.
All 50 eligible voters participated in the election, unanimously supporting Dr. Bong-Joon Jung (Ph.D., admitted in 1993, Department of Electrical Engineering) with a 100% approval rate as the interim president of the KAIST U.S. Alumni Association. Dr. Bong-Joon Jung currently serves as the Senior Technology Analyst and Partner at Ambex Venture Group and previously served as the President of the KAIST Silicon Valley Alumni Association. Dr. Jung expressed his intention to strengthen connections with KAIST alumni in the United States and contribute to the establishment of the U.S. alumni association as the interim president.
< Photo. Newly elected president of interim KAIST U.S. Alumni Association, Dr. Bong-Joon Jung. >
Man-Sung Yim, Vice President of the International Office, congratulated Dr. Bong-Joon Jung on his election and pledged continuous support for the activities of the interim KAIST U.S. Alumni Association, led by alumni. He stated, "The election of the interim president of the KAIST U.S. Alumni Association marks the beginning of active engagement not only from alumni associations in various regions but also from alumni across the Americas, reflecting sustained interest in their alma mater."
2024.04.29 View 5548
Dr. Bong-Joon Jung Elected as Interim President of KAIST U.S. Alumni Association
On April 29th, 2024, the Office of Global Initiative at KAIST, led by Vice President Man-Sung Yim, successfully conducted the election for the interim president of the KAIST U.S. Alumni Association. The authority to organize and operate the election was delegated by the KAIST U.S. Alumni Interim President Selection Committee Foundation, consisting of Je Woo Kim, Director of KAIST U.S. Foundation; Terri Kim, Director of KAIST U.S. Foundation; and Myungjin Yim, President of the KAIST Silicon Valley Alumni Association.
The election was announced during the KAIST Online U.S. Alumni Event held on December 8th, 2023, with the aim of establishing interim executive principles for six months and ultimately forming the official executive body of the KAIST U.S. Alumni Association.
The election was conducted according to the requirements set by the KAIST U.S. Alumni Interim President Selection Committee Foundation, which stated that "if there is a single candidate, they will be elected if they receive more than half of the votes from participating voters." The voting period lasted from April 13th (Monday) to April 24th (Friday) and was specifically directed towards KAIST alumni living in the Americas.
All 50 eligible voters participated in the election, unanimously supporting Dr. Bong-Joon Jung (Ph.D., admitted in 1993, Department of Electrical Engineering) with a 100% approval rate as the interim president of the KAIST U.S. Alumni Association. Dr. Bong-Joon Jung currently serves as the Senior Technology Analyst and Partner at Ambex Venture Group and previously served as the President of the KAIST Silicon Valley Alumni Association. Dr. Jung expressed his intention to strengthen connections with KAIST alumni in the United States and contribute to the establishment of the U.S. alumni association as the interim president.
< Photo. Newly elected president of interim KAIST U.S. Alumni Association, Dr. Bong-Joon Jung. >
Man-Sung Yim, Vice President of the International Office, congratulated Dr. Bong-Joon Jung on his election and pledged continuous support for the activities of the interim KAIST U.S. Alumni Association, led by alumni. He stated, "The election of the interim president of the KAIST U.S. Alumni Association marks the beginning of active engagement not only from alumni associations in various regions but also from alumni across the Americas, reflecting sustained interest in their alma mater."
2024.04.29 View 5548 -
 KAIST Develops Sodium Battery Capable of Rapid Charging in Just a Few Seconds
Sodium (Na), which is over 500 times more abundant than lithium (Li), has recently garnered significant attention for its potential in sodium-ion battery technologies. However, existing sodium-ion batteries face fundamental limitations, including lower power output, constrained storage properties, and longer charging times, necessitating the development of next-generation energy storage materials.
On the 11th of April, KAIST (represented by President Kwang Hyung Lee) announced that a research team led by Professor Jeung Ku Kang from the Department of Materials Science and Engineering had developed a high-energy, high-power hybrid sodium-ion battery capable of rapid charging.
The innovative hybrid energy storage system integrates anode materials typically used in batteries with cathodes suitable for supercapacitors. This combination allows the device to achieve both high storage capacities and rapid charge-discharge rates, positioning it as a viable next-generation alternative to lithium-ion batteries.
However, the development of a hybrid battery with high energy and high power density requires an improvement to the slow energy storage rate of battery-type anodes as well as the enhancement of the relatively low capacity of supercapacitor-type cathode materials.
< Figure 1. Schematic synthetic procedures of high-capacity/high-rate anode and cathode materials for a sodium-ion hybrid energy storages (SIHES) and their proposed energy storage mechanisms. Synthetic procedures for (a) ultrafine iron sulfide-embedded S-doped carbon/graphene (FS/C/G) anode and (b) zeolitic imidazolate framework-derived porous carbon (ZDPC) cathode materials. (c) Proposed energy storage mechanisms of Na+ ions in FS/C/G anode and ClO-4 ions in ZDPC cathode for an SIHES. >
To account for this, Professor Kang's team utilized two distinct metal-organic frameworks for the optimized synthesis of hybrid batteries. This approach led to the development of an anode material with improved kinetics through the inclusion of fine active materials in porous carbon derived from metal-organic frameworks. Additionally, a high-capacity cathode material was synthesized, and the combination of the cathode and anode materials allowed for the development of a sodium-ion storage system optimizing the balance and minimizing the disparities in energy storage rates between the electrodes.
The assembled full cell, comprising the newly developed anode and cathode, forms a high-performance hybrid sodium-ion energy storage device. This device surpasses the energy density of commercial lithium-ion batteries and exhibits the characteristics of supercapacitors' power density. It is expected to be suitable for rapid charging applications ranging from electric vehicles to smart electronic devices and aerospace technologies.
< Figure 2. Electrochemical characterizations of FS/C/G-20//ZDPC SIHES full cells (left). Ragone plots for FS/C/G-20//ZDPC (this work) and other previously reported sodium-ion electrochemical energy storage devices (right). >
Professor Kang noted that the hybrid sodium-ion energy storage device, capable of rapid charging and achieving an energy density of 247 Wh/kg and a power density of 34,748 W/kg, represents a breakthrough in overcoming the current limitations of energy storage systems. He anticipates broader applications across various electronic devices, including electric vehicles.
This research, co-authored by KAIST doctoral candidates Jong Hui Choi and Dong Won Kim, was published in the international journal Energy Storage Materials on March 29 with the title "Low-crystallinity conductive multivalence iron sulfide-embedded S-doped anode and high-surface-area O-doped cathode of 3D porous N-rich graphitic carbon frameworks for high-performance sodium-ion hybrid energy storages."
The study was conducted with support from the Ministry of Science and ICT and the National Research Foundation of Korea through the Nanomaterial Technology Development Project.
2024.04.18 View 18557
KAIST Develops Sodium Battery Capable of Rapid Charging in Just a Few Seconds
Sodium (Na), which is over 500 times more abundant than lithium (Li), has recently garnered significant attention for its potential in sodium-ion battery technologies. However, existing sodium-ion batteries face fundamental limitations, including lower power output, constrained storage properties, and longer charging times, necessitating the development of next-generation energy storage materials.
On the 11th of April, KAIST (represented by President Kwang Hyung Lee) announced that a research team led by Professor Jeung Ku Kang from the Department of Materials Science and Engineering had developed a high-energy, high-power hybrid sodium-ion battery capable of rapid charging.
The innovative hybrid energy storage system integrates anode materials typically used in batteries with cathodes suitable for supercapacitors. This combination allows the device to achieve both high storage capacities and rapid charge-discharge rates, positioning it as a viable next-generation alternative to lithium-ion batteries.
However, the development of a hybrid battery with high energy and high power density requires an improvement to the slow energy storage rate of battery-type anodes as well as the enhancement of the relatively low capacity of supercapacitor-type cathode materials.
< Figure 1. Schematic synthetic procedures of high-capacity/high-rate anode and cathode materials for a sodium-ion hybrid energy storages (SIHES) and their proposed energy storage mechanisms. Synthetic procedures for (a) ultrafine iron sulfide-embedded S-doped carbon/graphene (FS/C/G) anode and (b) zeolitic imidazolate framework-derived porous carbon (ZDPC) cathode materials. (c) Proposed energy storage mechanisms of Na+ ions in FS/C/G anode and ClO-4 ions in ZDPC cathode for an SIHES. >
To account for this, Professor Kang's team utilized two distinct metal-organic frameworks for the optimized synthesis of hybrid batteries. This approach led to the development of an anode material with improved kinetics through the inclusion of fine active materials in porous carbon derived from metal-organic frameworks. Additionally, a high-capacity cathode material was synthesized, and the combination of the cathode and anode materials allowed for the development of a sodium-ion storage system optimizing the balance and minimizing the disparities in energy storage rates between the electrodes.
The assembled full cell, comprising the newly developed anode and cathode, forms a high-performance hybrid sodium-ion energy storage device. This device surpasses the energy density of commercial lithium-ion batteries and exhibits the characteristics of supercapacitors' power density. It is expected to be suitable for rapid charging applications ranging from electric vehicles to smart electronic devices and aerospace technologies.
< Figure 2. Electrochemical characterizations of FS/C/G-20//ZDPC SIHES full cells (left). Ragone plots for FS/C/G-20//ZDPC (this work) and other previously reported sodium-ion electrochemical energy storage devices (right). >
Professor Kang noted that the hybrid sodium-ion energy storage device, capable of rapid charging and achieving an energy density of 247 Wh/kg and a power density of 34,748 W/kg, represents a breakthrough in overcoming the current limitations of energy storage systems. He anticipates broader applications across various electronic devices, including electric vehicles.
This research, co-authored by KAIST doctoral candidates Jong Hui Choi and Dong Won Kim, was published in the international journal Energy Storage Materials on March 29 with the title "Low-crystallinity conductive multivalence iron sulfide-embedded S-doped anode and high-surface-area O-doped cathode of 3D porous N-rich graphitic carbon frameworks for high-performance sodium-ion hybrid energy storages."
The study was conducted with support from the Ministry of Science and ICT and the National Research Foundation of Korea through the Nanomaterial Technology Development Project.
2024.04.18 View 18557 -
 KAIST introduces microbial food as a strategy food production of the future
The global food crisis is increasing due to rapid population growth and declining food productivity to climate change. Moreover, today's food production and supply system emit a huge amount of carbon dioxide, reaching 30% of the total amount emitted by humanity, aggravating climate change. Sustainable and nutritious microbial food is attracting attention as a key to overcoming this impasse.
KAIST (President Kwang Hyung Lee) announced on April 12th that Research Professor Kyeong Rok Choi of the BioProcess Engineering Research Center and Distinguished Professor Sang Yup Lee from the Department of Chemical and Biomolecular Engineering published a paper that proposes a direction of research on ‘microbial food production from sustainable raw materials.’
Microbial food refers to various foods and food ingredients produced using microorganisms. Microbial biomass contains a large amount of protein per unit in dry mass, comparable to that of meat, and emits the smallest amount of carbon dioxide and is required to produce a unit mass compared to various livestock, fish, shellfish, and crops. Since the amount of water and space requirement is small, it can be an eco-friendly, sustainable and highly nutritious food resource.
Fermented foods are the most readily available microbial foods around us. Although the proportion of microbial biomass in fermented foods is small, compounds with relatively low nutritional value, such as carbohydrates, are consumed during the fermentation process, and as microorganisms proliferate, the content of nutrients with higher nutritional value, such as proteins and vitamins, increases.
Various food compounds isolated and purified from biomass or culture media obtained through microbial culture are also a branch of microbial food. Examples that can be found around us include various amino acids, including monosodium glutamate, food proteins, enzymes, flavoring compounds, food colorings, and bioactive substances.
< Figure 1. Schematic diagram portraying various microbial biomass production strategies utlizing sustainable feedstocks >
Lastly, the most ultimate and fundamental form of microbial food can be said to be microbial biomass or extracts produced through microbial culture and foods cooked using them. A representative example is single-cell protein, which collectively refers to microbial biomass or microbial proteins extracted from it.
In this paper, the researchers comprehensively covered various non-edible raw materials and strategies for using them that can be used to produce microbial food in a more sustainable way. Furthermore, it covers various microbial foods that are actually produced in the industry using the relevant raw materials and their characteristics, as well as prospects for the production and generalization of sustainable microbial foods.
Research Professor Kyeong Rok Choi, the first author of this paper, said, “Microbial foods produced from various sustainable raw materials will soon be commonly encountered at our tables.” Second author Seok Yeong Jung, a doctoral student, also said, “Microbial foods of the future will not be limited foods consumed only out of a sense of obligation to the environment, but will be complete foods that are consumed by choice because of their nutritional value and taste.” In addition, Distinguished Professor Sang Yup Lee said, “It is time for the industry and academia, as well as the public and private sectors, to cooperate more closely so that more diverse microbial foods can be developed and supplied in order to create a sustainable society for ourselves and our descendants.”
< Figure 2. Compositions and environmental footprints of animal, plant and microbial biomass. >
This paper was published online on April 9 in ‘Nature Microbiology’ published by Nature.
※ Paper title: From sustainable feedstocks to microbial foods
※ Author information: Kyeong Rok Choi (first author), Seok Yeong Jung (second author) and Sang Yup Lee (corresponding author)
This research was conducted under the development of platform technologies of microbial cell factories for the next-generation biorefineries project (project leader KAIST Distinguished Professor Sang Yup Lee) supported by the Ministry of Science and ICT and the Cooperative Research Program for Agriculture Science and Technology Development (Project leader KAIST Research Professor Kyeong Rok Choi) of the Agricultural Microbiology Project Group (Director, Professor Pahn-Shick Chang) supported by the Rural Development Administration.
2024.04.12 View 7974
KAIST introduces microbial food as a strategy food production of the future
The global food crisis is increasing due to rapid population growth and declining food productivity to climate change. Moreover, today's food production and supply system emit a huge amount of carbon dioxide, reaching 30% of the total amount emitted by humanity, aggravating climate change. Sustainable and nutritious microbial food is attracting attention as a key to overcoming this impasse.
KAIST (President Kwang Hyung Lee) announced on April 12th that Research Professor Kyeong Rok Choi of the BioProcess Engineering Research Center and Distinguished Professor Sang Yup Lee from the Department of Chemical and Biomolecular Engineering published a paper that proposes a direction of research on ‘microbial food production from sustainable raw materials.’
Microbial food refers to various foods and food ingredients produced using microorganisms. Microbial biomass contains a large amount of protein per unit in dry mass, comparable to that of meat, and emits the smallest amount of carbon dioxide and is required to produce a unit mass compared to various livestock, fish, shellfish, and crops. Since the amount of water and space requirement is small, it can be an eco-friendly, sustainable and highly nutritious food resource.
Fermented foods are the most readily available microbial foods around us. Although the proportion of microbial biomass in fermented foods is small, compounds with relatively low nutritional value, such as carbohydrates, are consumed during the fermentation process, and as microorganisms proliferate, the content of nutrients with higher nutritional value, such as proteins and vitamins, increases.
Various food compounds isolated and purified from biomass or culture media obtained through microbial culture are also a branch of microbial food. Examples that can be found around us include various amino acids, including monosodium glutamate, food proteins, enzymes, flavoring compounds, food colorings, and bioactive substances.
< Figure 1. Schematic diagram portraying various microbial biomass production strategies utlizing sustainable feedstocks >
Lastly, the most ultimate and fundamental form of microbial food can be said to be microbial biomass or extracts produced through microbial culture and foods cooked using them. A representative example is single-cell protein, which collectively refers to microbial biomass or microbial proteins extracted from it.
In this paper, the researchers comprehensively covered various non-edible raw materials and strategies for using them that can be used to produce microbial food in a more sustainable way. Furthermore, it covers various microbial foods that are actually produced in the industry using the relevant raw materials and their characteristics, as well as prospects for the production and generalization of sustainable microbial foods.
Research Professor Kyeong Rok Choi, the first author of this paper, said, “Microbial foods produced from various sustainable raw materials will soon be commonly encountered at our tables.” Second author Seok Yeong Jung, a doctoral student, also said, “Microbial foods of the future will not be limited foods consumed only out of a sense of obligation to the environment, but will be complete foods that are consumed by choice because of their nutritional value and taste.” In addition, Distinguished Professor Sang Yup Lee said, “It is time for the industry and academia, as well as the public and private sectors, to cooperate more closely so that more diverse microbial foods can be developed and supplied in order to create a sustainable society for ourselves and our descendants.”
< Figure 2. Compositions and environmental footprints of animal, plant and microbial biomass. >
This paper was published online on April 9 in ‘Nature Microbiology’ published by Nature.
※ Paper title: From sustainable feedstocks to microbial foods
※ Author information: Kyeong Rok Choi (first author), Seok Yeong Jung (second author) and Sang Yup Lee (corresponding author)
This research was conducted under the development of platform technologies of microbial cell factories for the next-generation biorefineries project (project leader KAIST Distinguished Professor Sang Yup Lee) supported by the Ministry of Science and ICT and the Cooperative Research Program for Agriculture Science and Technology Development (Project leader KAIST Research Professor Kyeong Rok Choi) of the Agricultural Microbiology Project Group (Director, Professor Pahn-Shick Chang) supported by the Rural Development Administration.
2024.04.12 View 7974