Springer
-
 Parasitic Robot System for Turtle's Waypoint Navigation
A KAIST research team presented a hybrid animal-robot interaction called “the parasitic robot system,” that imitates the nature relationship between parasites and host.
The research team led by Professor Phil-Seung Lee of the Department of Mechanical Engineering took an animal’s locomotive abilities to apply the theory of using a robot as a parasite. The robot is attached to its host animal in a way similar to an actual parasite, and it interacts with the host through particular devices and algorithms.
Even with remarkable technology advancements, robots that operate in complex and harsh environments still have some serious limitations in moving and recharging. However, millions of years of evolution have led to there being many real animals capable of excellent locomotion and survive in actual natural environment.
Certain kinds of real parasites can manipulate the behavior of the host to increase the probability of its own reproduction. Similarly, in the proposed concept of a “parasitic robot,” a specific behavior is induced by the parasitic robot in its host to benefit the robot.
The team chose a turtle as their first host animal and designed a parasitic robot that can perform “stimulus-response training.” The parasitic robot, which is attached to the turtle, can induce the turtle’s object-tracking behavior through repeated training sessions.
The robot then simply guides it using LEDs and feeds it snacks as a reward for going in the right direction through a programmed algorithm. After training sessions lasting five weeks, the parasitic robot can successfully control the direction of movement of the host turtles in the waypoint navigation task in a water tank.
This hybrid animal–robot interaction system could provide an alternative solution of the limitations of conventional mobile robot systems in various fields. Ph.D. candidate Dae-Gun Kim, the first author of this research said that there are a wide variety of animals including mice, birds, and fish that could perform equally as well at such tasks. He said that in the future, this system will be applied to various exploration and reconnaissance missions that humans and robots find it difficult to do on their own.
Kim said, “This hybrid animal-robot interaction system could provide an alternative solution to the limitations of conventional mobile robot systems in various fields, and could also act as a useful interaction system for the behavioral sciences.”
The research was published in the Journal of Bionic Engineering April issue.
2017.05.19 View 10581
Parasitic Robot System for Turtle's Waypoint Navigation
A KAIST research team presented a hybrid animal-robot interaction called “the parasitic robot system,” that imitates the nature relationship between parasites and host.
The research team led by Professor Phil-Seung Lee of the Department of Mechanical Engineering took an animal’s locomotive abilities to apply the theory of using a robot as a parasite. The robot is attached to its host animal in a way similar to an actual parasite, and it interacts with the host through particular devices and algorithms.
Even with remarkable technology advancements, robots that operate in complex and harsh environments still have some serious limitations in moving and recharging. However, millions of years of evolution have led to there being many real animals capable of excellent locomotion and survive in actual natural environment.
Certain kinds of real parasites can manipulate the behavior of the host to increase the probability of its own reproduction. Similarly, in the proposed concept of a “parasitic robot,” a specific behavior is induced by the parasitic robot in its host to benefit the robot.
The team chose a turtle as their first host animal and designed a parasitic robot that can perform “stimulus-response training.” The parasitic robot, which is attached to the turtle, can induce the turtle’s object-tracking behavior through repeated training sessions.
The robot then simply guides it using LEDs and feeds it snacks as a reward for going in the right direction through a programmed algorithm. After training sessions lasting five weeks, the parasitic robot can successfully control the direction of movement of the host turtles in the waypoint navigation task in a water tank.
This hybrid animal–robot interaction system could provide an alternative solution of the limitations of conventional mobile robot systems in various fields. Ph.D. candidate Dae-Gun Kim, the first author of this research said that there are a wide variety of animals including mice, birds, and fish that could perform equally as well at such tasks. He said that in the future, this system will be applied to various exploration and reconnaissance missions that humans and robots find it difficult to do on their own.
Kim said, “This hybrid animal-robot interaction system could provide an alternative solution to the limitations of conventional mobile robot systems in various fields, and could also act as a useful interaction system for the behavioral sciences.”
The research was published in the Journal of Bionic Engineering April issue.
2017.05.19 View 10581 -
 Controlling Turtle Motion with Human Thought
KAIST researchers have developed a technology that can remotely control an animal’s movement with human thought.
In the 2009 blockbuster “Avatar,” a human remotely controls the body of an alien. It does so by injecting human intelligence into a remotely located, biological body. Although still in the realm of science fiction, researchers are nevertheless developing so-called ‘brain-computer interfaces’ (BCIs) following recent advances in electronics and computing. These technologies can ‘read’ and use human thought to control machines, for example, humanoid robots.
New research has demonstrated the possibility of combining a BCI with a device that transmits information from a computer to a brain, or known as a ‘computer-to-brain interface’ (CBI). The combination of these devices could be used to establish a functional link between the brains of different species. Now, researchers from the Korea Advanced Institute of Science and Technology (KAIST) have developed a human-turtle interaction system in which a signal originating from a human brain can affect where a turtle moves.
Unlike previous research that has tried to control animal movement by applying invasive methods, most notably in insects, Professors Phill-Seung Lee of the Mechanical Engineering Department and Sungho Jo of the Computing School propose a conceptual system that can guide an animal’s moving path by controlling its instinctive escape behavior. They chose a turtle because of its cognitive abilities as well as its ability to distinguish different wavelengths of light. Specifically, turtles can recognize a white light source as an open space and so move toward it. They also show specific avoidance behavior to things that might obstruct their view. Turtles also move toward and away from obstacles in their environment in a predictable manner. It was this instinctive, predictable behavior that the researchers induced using the BCI.
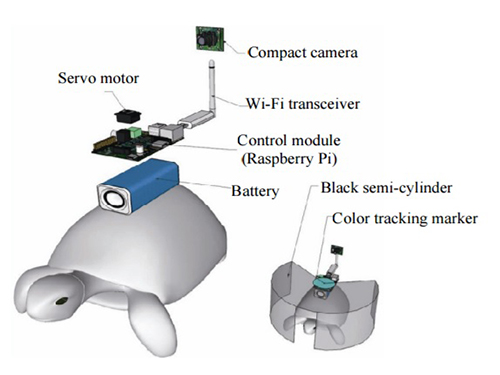
The entire human-turtle setup is as follows: A head-mounted display (HMD) is combined with a BCI to immerse the human user in the turtle’s environment. The human operator wears the BCI-HMD system, while the turtle has a 'cyborg system'—consisting of a camera, Wi-Fi transceiver, computer control module, and battery—all mounted on the turtle’s upper shell. Also included on the turtle’s shell is a black semi-cylinder with a slit, which forms the ‘stimulation device.’ This can be turned ±36 degrees via the BCI.
The entire process works like this: the human operator receives images from the camera mounted on the turtle. These real-time video images allow the human operator to decide where the turtle should move. The human provides thought commands that are recognized by the wearable BCI system as electroencephalography (EEG) signals. The BCI can distinguish between three mental states: left, right, and idle. The left and right commands activate the turtle’s stimulation device via Wi-Fi, turning it so that it obstructs the turtle’s view. This invokes its natural instinct to move toward light and change its direction. Finally, the human acquires updated visual feedback from the camera mounted on the shell and in this way continues to remotely navigate the turtle’s trajectory.
The research demonstrates that the animal guiding scheme via BCI can be used in a variety of environments with turtles moving indoors and outdoors on many different surfaces, like gravel and grass, and tackling a range of obstacles, such as shallow water and trees. This technology could be developed to integrate positioning systems and improved augmented and virtual reality techniques, enabling various applications, including devices for military reconnaissance and surveillance.
***
Reference: “Remote Navigation of Turtle by Controlling Instinct Behavior via Human Brain-computer Interface,” Journal of Bionic Engineering, July 2016 (DOI: 10.1016/S1672-6529(16)60322-0)
Depiction of Cyborg System
A human controller influences the turtle’s escape behavior by sending left and right signals via Wi-Fi to a control system on the back of the turtle.
2017.02.21 View 16225
Controlling Turtle Motion with Human Thought
KAIST researchers have developed a technology that can remotely control an animal’s movement with human thought.
In the 2009 blockbuster “Avatar,” a human remotely controls the body of an alien. It does so by injecting human intelligence into a remotely located, biological body. Although still in the realm of science fiction, researchers are nevertheless developing so-called ‘brain-computer interfaces’ (BCIs) following recent advances in electronics and computing. These technologies can ‘read’ and use human thought to control machines, for example, humanoid robots.
New research has demonstrated the possibility of combining a BCI with a device that transmits information from a computer to a brain, or known as a ‘computer-to-brain interface’ (CBI). The combination of these devices could be used to establish a functional link between the brains of different species. Now, researchers from the Korea Advanced Institute of Science and Technology (KAIST) have developed a human-turtle interaction system in which a signal originating from a human brain can affect where a turtle moves.
Unlike previous research that has tried to control animal movement by applying invasive methods, most notably in insects, Professors Phill-Seung Lee of the Mechanical Engineering Department and Sungho Jo of the Computing School propose a conceptual system that can guide an animal’s moving path by controlling its instinctive escape behavior. They chose a turtle because of its cognitive abilities as well as its ability to distinguish different wavelengths of light. Specifically, turtles can recognize a white light source as an open space and so move toward it. They also show specific avoidance behavior to things that might obstruct their view. Turtles also move toward and away from obstacles in their environment in a predictable manner. It was this instinctive, predictable behavior that the researchers induced using the BCI.
The entire human-turtle setup is as follows: A head-mounted display (HMD) is combined with a BCI to immerse the human user in the turtle’s environment. The human operator wears the BCI-HMD system, while the turtle has a 'cyborg system'—consisting of a camera, Wi-Fi transceiver, computer control module, and battery—all mounted on the turtle’s upper shell. Also included on the turtle’s shell is a black semi-cylinder with a slit, which forms the ‘stimulation device.’ This can be turned ±36 degrees via the BCI.
The entire process works like this: the human operator receives images from the camera mounted on the turtle. These real-time video images allow the human operator to decide where the turtle should move. The human provides thought commands that are recognized by the wearable BCI system as electroencephalography (EEG) signals. The BCI can distinguish between three mental states: left, right, and idle. The left and right commands activate the turtle’s stimulation device via Wi-Fi, turning it so that it obstructs the turtle’s view. This invokes its natural instinct to move toward light and change its direction. Finally, the human acquires updated visual feedback from the camera mounted on the shell and in this way continues to remotely navigate the turtle’s trajectory.
The research demonstrates that the animal guiding scheme via BCI can be used in a variety of environments with turtles moving indoors and outdoors on many different surfaces, like gravel and grass, and tackling a range of obstacles, such as shallow water and trees. This technology could be developed to integrate positioning systems and improved augmented and virtual reality techniques, enabling various applications, including devices for military reconnaissance and surveillance.
***
Reference: “Remote Navigation of Turtle by Controlling Instinct Behavior via Human Brain-computer Interface,” Journal of Bionic Engineering, July 2016 (DOI: 10.1016/S1672-6529(16)60322-0)
Depiction of Cyborg System
A human controller influences the turtle’s escape behavior by sending left and right signals via Wi-Fi to a control system on the back of the turtle.
2017.02.21 View 16225 -
 Big Data Reveals the Secret of Classical Music Creation
Professor Juyong Park of the Graduate School of Culture Technology at KAIST and his research team have recently published the result of their study (“Topology and Evolution of the Network of Western Classical Music Composers”) on the dynamics of how classical music is created, stylized, and disseminated in EPJ Data Science online on April 22, 2015. For the press release issued by the journal, please go to the link below:
EPJ Data Science, May 6, 2015
“EPJ Data Science Highlight—Big Data Reveals Classical Music Creation Secrets”
http://www.epj.org/113-epj-ds/941-epjds-highlight-big-data-reveals-classical-music-creation-secrets
Researchers used big-data analysis and modelling technique to examine the complex, undercurrent network of classical music composers, which was constructed from the large volume of compact disc (CD) recordings data collected from an online retailer, ArkivMusic, and a music reference website, AllMusicGuide.
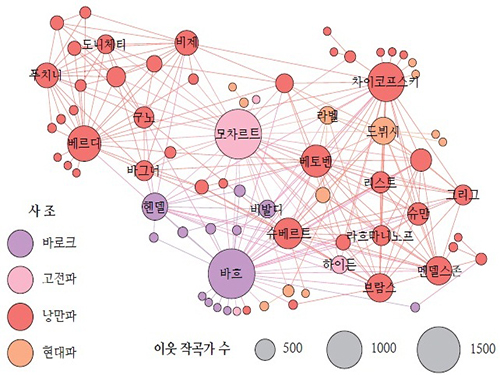
The study discovered that the basic characteristics of composers’ network are similar to many real-world networks, including the small-world property, the existence of a giant component, high clustering, and heavy-tailed degree distributions. The research team also found that composers collaborated and influenced each other and that composers’ networks grew over time.
The research showed that consumers of classical music CDs tend to listen together to the music of a certain group of different composers, offering a useful tool to understand how the music style and market develops. Based on this, the research team predicted the future of the classical music market would be centered on top composers, while maintaining diversity due to the growing number of new composers.
Professor Park said, “In recent years, technology greatly affects the way we consume culture and art. Accordingly, we see more and more artists and institutions try to incorporate technology into their creative process, and this will lead us to larger- and higher-quality data that can allow us to learn more about culture and art. The quantitative methodology we have demonstrated in our research will give us an opportunity to explore the nature of art and literature in novel ways.”
The European Physical Journal (EPJ) comprises a series of peer-reviewed journals, eleven in total, which cover physics and related subjects such as The Large Hadron Collider, condensed matter, particles, soft matter, and biological physics. The EPJ Data Science is the latest journal launched by EPJ.
Figure: Backbone of the Composer Network
The composer-composer network backbone, projected from the CD-composer network, reveals the major component of the network. The node sizes represent the composers’ degrees, and the colors represent their active periods.
2015.05.07 View 11362
Big Data Reveals the Secret of Classical Music Creation
Professor Juyong Park of the Graduate School of Culture Technology at KAIST and his research team have recently published the result of their study (“Topology and Evolution of the Network of Western Classical Music Composers”) on the dynamics of how classical music is created, stylized, and disseminated in EPJ Data Science online on April 22, 2015. For the press release issued by the journal, please go to the link below:
EPJ Data Science, May 6, 2015
“EPJ Data Science Highlight—Big Data Reveals Classical Music Creation Secrets”
http://www.epj.org/113-epj-ds/941-epjds-highlight-big-data-reveals-classical-music-creation-secrets
Researchers used big-data analysis and modelling technique to examine the complex, undercurrent network of classical music composers, which was constructed from the large volume of compact disc (CD) recordings data collected from an online retailer, ArkivMusic, and a music reference website, AllMusicGuide.
The study discovered that the basic characteristics of composers’ network are similar to many real-world networks, including the small-world property, the existence of a giant component, high clustering, and heavy-tailed degree distributions. The research team also found that composers collaborated and influenced each other and that composers’ networks grew over time.
The research showed that consumers of classical music CDs tend to listen together to the music of a certain group of different composers, offering a useful tool to understand how the music style and market develops. Based on this, the research team predicted the future of the classical music market would be centered on top composers, while maintaining diversity due to the growing number of new composers.
Professor Park said, “In recent years, technology greatly affects the way we consume culture and art. Accordingly, we see more and more artists and institutions try to incorporate technology into their creative process, and this will lead us to larger- and higher-quality data that can allow us to learn more about culture and art. The quantitative methodology we have demonstrated in our research will give us an opportunity to explore the nature of art and literature in novel ways.”
The European Physical Journal (EPJ) comprises a series of peer-reviewed journals, eleven in total, which cover physics and related subjects such as The Large Hadron Collider, condensed matter, particles, soft matter, and biological physics. The EPJ Data Science is the latest journal launched by EPJ.
Figure: Backbone of the Composer Network
The composer-composer network backbone, projected from the CD-composer network, reveals the major component of the network. The node sizes represent the composers’ degrees, and the colors represent their active periods.
2015.05.07 View 11362 -
 Prof. Seong Publishes English Book on Reliability in Digital Control Systems
Prof. Poong-Hyun Seong of Department of Nuclear and Quantum Engineering has recently published an English-language book on reliability and risk issues in large scale safety-critical digital control systems used in complex facilities such as nuclear power plants.
The book entitled “Reliability and Risk Issues in Large Scale Safety-critical Digital Control Systems” is a result of Prof. Seong’s collaboration with some KAIST graduates who used to be under his guidance. The 303-page publication has been published by Springer, one of the world’s leading publishers of academic journals, as part of the Springer Series in Reliability Engineering.
The book consists of four parts; part I deals with issues related to hardware, part II software, part III human factors and finally the last part integrated systems. It can be purchased through some on-line book stores such as Amazon.com.
Prof. Seong served as an editor-in-chief for Nuclear Engineering and Technology (NET), an international journal of Korean Nuclear Society (KNS), from 2003 to 2008. He also worked as a chair of the Human Factors Division (HFD) of American Nuclear Society (ANS) from 2006 to 2007. Prof. Seong is now a commissioner of Korea Nuclear Safety Commission which is the nation’s highest committee on Nuclear Safety.
2008.12.26 View 19272
Prof. Seong Publishes English Book on Reliability in Digital Control Systems
Prof. Poong-Hyun Seong of Department of Nuclear and Quantum Engineering has recently published an English-language book on reliability and risk issues in large scale safety-critical digital control systems used in complex facilities such as nuclear power plants.
The book entitled “Reliability and Risk Issues in Large Scale Safety-critical Digital Control Systems” is a result of Prof. Seong’s collaboration with some KAIST graduates who used to be under his guidance. The 303-page publication has been published by Springer, one of the world’s leading publishers of academic journals, as part of the Springer Series in Reliability Engineering.
The book consists of four parts; part I deals with issues related to hardware, part II software, part III human factors and finally the last part integrated systems. It can be purchased through some on-line book stores such as Amazon.com.
Prof. Seong served as an editor-in-chief for Nuclear Engineering and Technology (NET), an international journal of Korean Nuclear Society (KNS), from 2003 to 2008. He also worked as a chair of the Human Factors Division (HFD) of American Nuclear Society (ANS) from 2006 to 2007. Prof. Seong is now a commissioner of Korea Nuclear Safety Commission which is the nation’s highest committee on Nuclear Safety.
2008.12.26 View 19272