aerial
-
 KAIST develops ‘Hoverbike’ to roam the future skies
< Photo 1. A group photo of the research team >
Hoverbike is a kind of next-generation mobility that can complement the existing transportation system and can be used as an air transportation means without traffic congestion through high-weight payloads and long-distance flights. It is expected that domestic researchers will contribute to the development of the domestic PAV* and UAM markets by developing a domestically developed manned/unmanned hybrid aircraft that escapes dependence on foreign technology through the development of a high-performance hoverbike.
*PAV: Personal Aerial Vehicle. It is a key element of future urban air mobility (UAM, Urban Air Mobility) and constitutes an important part of the next-generation transportation system.
KAIST (President Kwang-Hyung Lee) announced on the 27th of December that the research team of Professor Hyochoong Bang of the Department of Aerospace Engineering successfully developed the core technology of a highly reliable multipurpose vertical takeoff and landing hoverbike that can be operated by both manned and unmanned vehicles.
This research was participated by the research teams of Professor Jae-Hung Han, Professor Ji-yun Lee, Professor Jae-myung Ahn, Professor Han-Lim Choi, and Professor Chang-Hun Lee of the Department of Aerospace Engineering at KAIST, Professor Dongjin Lee of the Department of Unmanned Aerial Vehicles at Hanseo University, and Professor Jong-Oh Park of the Department of Electronics Engineering at Dong-A University.
The research team secured key technologies related to the optimal design of a multipurpose aircraft, hybrid propulsion system, highly reliable precision navigation and flight control system, autonomous flight, and fault detection for the development of a high-performance hoverbike.
< Figure 1. Key features of high-reliability multi-purpose hoverbike >
The hoverbike platform introduced a gasoline engine-based hybrid system to overcome the shortcomings of battery-based drones, achieving approximately 60% better performance and maximum payload weight compared to overseas technology levels. Through this, it is expected to be utilized in various fields such as emergency supply delivery, logistics, and rescue activities for civilian use, and military transport and mission support for military use.
The navigation system was applied by implementing multi-sensor fusion technology based on DGPS/INS* to enable stable flight even in environments without GPS or with weak signals using high-reliability precision navigation technology.
*DGPS/INS: Navigation solution combining high accuracy of Differential GPS (DGPS) and Inertial Navigation System (INS)
In addition, high-reliability flight control technology was developed to enable reliable maneuvering even under external factors such as payload and wind, and model uncertainty, and fault detection technology was also developed.
A guidance technique to automatically land on a helipad after selecting a safe automatic landing area by configuring a high-reliability autonomous flight system was implemented with high accuracy. Stable operation is possible even in complex environments through obstacle avoidance and automatic landing autonomous flight technology.
< Figure 2. Hoverbike prototype model >
Professor Hyochoong Bang, the research director, emphasized, “We have proven the high practicality of the hoverbike in various environments through high-reliability flight control and precision navigation technology.” He added, “The hoverbike is a promising research result that can not only provide a major path leading to PAVs and future aircraft, but also surpass existing drone technology by several levels. This achievement is even more meaningful because it is the result of five years of effort by eight joint research teams, including the project’s practitioners, PhD students Kwangwoo Jang and Hyungjoo Ahn.”
This study aims to secure core technologies for manned/unmanned multipurpose hoverbikes that can be utilized as new concept aircraft in the defense and civilian sectors. It started as the Defense Acquisition Program Administration’s Defense Technology for Future Challenge Research and Development Project in 2019 and was completed in 2024 under the management of the Agency for Defense Development. It is scheduled to be exhibited for the first time at the 2025 Drone Show Korea (DSK2025), which will be held at BEXCO in Busan from February 26 to 28, 2025.
2024.12.27 View 3622
KAIST develops ‘Hoverbike’ to roam the future skies
< Photo 1. A group photo of the research team >
Hoverbike is a kind of next-generation mobility that can complement the existing transportation system and can be used as an air transportation means without traffic congestion through high-weight payloads and long-distance flights. It is expected that domestic researchers will contribute to the development of the domestic PAV* and UAM markets by developing a domestically developed manned/unmanned hybrid aircraft that escapes dependence on foreign technology through the development of a high-performance hoverbike.
*PAV: Personal Aerial Vehicle. It is a key element of future urban air mobility (UAM, Urban Air Mobility) and constitutes an important part of the next-generation transportation system.
KAIST (President Kwang-Hyung Lee) announced on the 27th of December that the research team of Professor Hyochoong Bang of the Department of Aerospace Engineering successfully developed the core technology of a highly reliable multipurpose vertical takeoff and landing hoverbike that can be operated by both manned and unmanned vehicles.
This research was participated by the research teams of Professor Jae-Hung Han, Professor Ji-yun Lee, Professor Jae-myung Ahn, Professor Han-Lim Choi, and Professor Chang-Hun Lee of the Department of Aerospace Engineering at KAIST, Professor Dongjin Lee of the Department of Unmanned Aerial Vehicles at Hanseo University, and Professor Jong-Oh Park of the Department of Electronics Engineering at Dong-A University.
The research team secured key technologies related to the optimal design of a multipurpose aircraft, hybrid propulsion system, highly reliable precision navigation and flight control system, autonomous flight, and fault detection for the development of a high-performance hoverbike.
< Figure 1. Key features of high-reliability multi-purpose hoverbike >
The hoverbike platform introduced a gasoline engine-based hybrid system to overcome the shortcomings of battery-based drones, achieving approximately 60% better performance and maximum payload weight compared to overseas technology levels. Through this, it is expected to be utilized in various fields such as emergency supply delivery, logistics, and rescue activities for civilian use, and military transport and mission support for military use.
The navigation system was applied by implementing multi-sensor fusion technology based on DGPS/INS* to enable stable flight even in environments without GPS or with weak signals using high-reliability precision navigation technology.
*DGPS/INS: Navigation solution combining high accuracy of Differential GPS (DGPS) and Inertial Navigation System (INS)
In addition, high-reliability flight control technology was developed to enable reliable maneuvering even under external factors such as payload and wind, and model uncertainty, and fault detection technology was also developed.
A guidance technique to automatically land on a helipad after selecting a safe automatic landing area by configuring a high-reliability autonomous flight system was implemented with high accuracy. Stable operation is possible even in complex environments through obstacle avoidance and automatic landing autonomous flight technology.
< Figure 2. Hoverbike prototype model >
Professor Hyochoong Bang, the research director, emphasized, “We have proven the high practicality of the hoverbike in various environments through high-reliability flight control and precision navigation technology.” He added, “The hoverbike is a promising research result that can not only provide a major path leading to PAVs and future aircraft, but also surpass existing drone technology by several levels. This achievement is even more meaningful because it is the result of five years of effort by eight joint research teams, including the project’s practitioners, PhD students Kwangwoo Jang and Hyungjoo Ahn.”
This study aims to secure core technologies for manned/unmanned multipurpose hoverbikes that can be utilized as new concept aircraft in the defense and civilian sectors. It started as the Defense Acquisition Program Administration’s Defense Technology for Future Challenge Research and Development Project in 2019 and was completed in 2024 under the management of the Agency for Defense Development. It is scheduled to be exhibited for the first time at the 2025 Drone Show Korea (DSK2025), which will be held at BEXCO in Busan from February 26 to 28, 2025.
2024.12.27 View 3622 -
 Team KAIST placed among top two at MBZIRC Maritime Grand Challenge
Representing Korean Robotics at Sea: KAIST’s 26-month strife rewarded
Team KAIST placed among top two at MBZIRC Maritime Grand Challenge
- Team KAIST, composed of students from the labs of Professor Jinwhan Kim of the Department of Mechanical Engineering and Professor Hyunchul Shim of the School of Electrical and Engineering, came through the challenge as the first runner-up winning the prize money totaling up to $650,000 (KRW 860 million).
- Successfully led the autonomous collaboration of unmanned aerial and maritime vehicles using cutting-edge robotics and AI technology through to the final round of the competition held in Abu Dhabi from January 10 to February 6, 2024.
KAIST (President Kwang-Hyung Lee), reported on the 8th that Team KAIST, led by students from the labs of Professor Jinwhan Kim of the Department of Mechanical Engineering and Professor Hyunchul Shim of the School of Electrical Engineering, with Pablo Aviation as a partner, won a total prize money of $650,000 (KRW 860 million) at the Maritime Grand Challenge by the Mohamed Bin Zayed International Robotics Challenge (MBZIRC), finishing first runner-up.
This competition, which is the largest ever robotics competition held over water, is sponsored by the government of the United Arab Emirates and organized by ASPIRE, an organization under the Abu Dhabi Ministry of Science, with a total prize money of $3 million.
In the competition, which started at the end of 2021, 52 teams from around the world participated and five teams were selected to go on to the finals in February 2023 after going through the first and second stages of screening. The final round was held from January 10 to February 6, 2024, using actual unmanned ships and drones in a secluded sea area of 10 km2 off the coast of Abu Dhabi, the capital of the United Arab Emirates. A total of 18 KAIST students and Professor Jinwhan Kim and Professor Hyunchul Shim took part in this competition at the location at Abu Dhabi.
Team KAIST will receive $500,000 in prize money for taking second place in the final, and the team’s prize money totals up to $650,000 including $150,000 that was as special midterm award for finalists.
The final mission scenario is to find the target vessel on the run carrying illegal cargoes among many ships moving within the GPS-disabled marine surface, and inspect the deck for two different types of stolen cargo to recover them using the aerial vehicle to bring the small cargo and the robot manipulator topped on an unmanned ship to retrieve the larger one. The true aim of the mission is to complete it through autonomous collaboration of the unmanned ship and the aerial vehicle without human intervention throughout the entire mission process. In particular, since GPS cannot be used in this competition due to regulations, Professor Jinwhan Kim's research team developed autonomous operation techniques for unmanned ships, including searching and navigating methods using maritime radar, and Professor Hyunchul Shim's research team developed video-based navigation and a technology to combine a small autonomous robot with a drone.
The final mission is to retrieve cargo on board a ship fleeing at sea through autonomous collaboration between unmanned ships and unmanned aerial vehicles without human intervention. The overall mission consists the first stage of conducting the inspection to find the target ship among several ships moving at sea and the second stage of conducting the intervention mission to retrieve the cargoes on the deck of the ship. Each team was given a total of three opportunities, and the team that completed the highest-level mission in the shortest time during the three attempts received the highest score.
In the first attempt, KAIST was the only team to succeed in the first stage search mission, but the competition began in earnest as the Croatian team also completed the first stage mission in the second attempt. As the competition schedule was delayed due to strong winds and high waves that continued for several days, the organizers decided to hold the finals with the three teams, including the Team KAIST and the team from Croatia’s the University of Zagreb, which completed the first stage of the mission, and Team Fly-Eagle, a team of researcher from China and UAE that partially completed the first stage. The three teams were given the chance to proceed to the finals and try for the third attempt, and in the final competition, the Croatian team won, KAIST took the second place, and the combined team of UAE-China combined team took the third place. The final prize to be given for the winning team is set at $2 million with $500,000 for the runner-up team, and $250,000 for the third-place.
Professor Jinwhan Kim of the Department of Mechanical Engineering, who served as the advisor for Team KAIST, said, “I would like to express my gratitude and congratulations to the students who put in a huge academic and physical efforts in preparing for the competition over the past two years. I feel rewarded because, regardless of the results, every bit of efforts put into this up to this point will become the base of their confidence and a valuable asset in their growth into a great researcher.” Sol Han, a doctoral student in mechanical engineering who served as the team leader, said, “I am disappointed of how narrowly we missed out on winning at the end, but I am satisfied with the significance of the output we’ve got and I am grateful to the team members who worked hard together for that.”
HD Hyundai, Rainbow Robotics, Avikus, and FIMS also participated as sponsors for Team KAIST's campaign.
2024.02.09 View 11225
Team KAIST placed among top two at MBZIRC Maritime Grand Challenge
Representing Korean Robotics at Sea: KAIST’s 26-month strife rewarded
Team KAIST placed among top two at MBZIRC Maritime Grand Challenge
- Team KAIST, composed of students from the labs of Professor Jinwhan Kim of the Department of Mechanical Engineering and Professor Hyunchul Shim of the School of Electrical and Engineering, came through the challenge as the first runner-up winning the prize money totaling up to $650,000 (KRW 860 million).
- Successfully led the autonomous collaboration of unmanned aerial and maritime vehicles using cutting-edge robotics and AI technology through to the final round of the competition held in Abu Dhabi from January 10 to February 6, 2024.
KAIST (President Kwang-Hyung Lee), reported on the 8th that Team KAIST, led by students from the labs of Professor Jinwhan Kim of the Department of Mechanical Engineering and Professor Hyunchul Shim of the School of Electrical Engineering, with Pablo Aviation as a partner, won a total prize money of $650,000 (KRW 860 million) at the Maritime Grand Challenge by the Mohamed Bin Zayed International Robotics Challenge (MBZIRC), finishing first runner-up.
This competition, which is the largest ever robotics competition held over water, is sponsored by the government of the United Arab Emirates and organized by ASPIRE, an organization under the Abu Dhabi Ministry of Science, with a total prize money of $3 million.
In the competition, which started at the end of 2021, 52 teams from around the world participated and five teams were selected to go on to the finals in February 2023 after going through the first and second stages of screening. The final round was held from January 10 to February 6, 2024, using actual unmanned ships and drones in a secluded sea area of 10 km2 off the coast of Abu Dhabi, the capital of the United Arab Emirates. A total of 18 KAIST students and Professor Jinwhan Kim and Professor Hyunchul Shim took part in this competition at the location at Abu Dhabi.
Team KAIST will receive $500,000 in prize money for taking second place in the final, and the team’s prize money totals up to $650,000 including $150,000 that was as special midterm award for finalists.
The final mission scenario is to find the target vessel on the run carrying illegal cargoes among many ships moving within the GPS-disabled marine surface, and inspect the deck for two different types of stolen cargo to recover them using the aerial vehicle to bring the small cargo and the robot manipulator topped on an unmanned ship to retrieve the larger one. The true aim of the mission is to complete it through autonomous collaboration of the unmanned ship and the aerial vehicle without human intervention throughout the entire mission process. In particular, since GPS cannot be used in this competition due to regulations, Professor Jinwhan Kim's research team developed autonomous operation techniques for unmanned ships, including searching and navigating methods using maritime radar, and Professor Hyunchul Shim's research team developed video-based navigation and a technology to combine a small autonomous robot with a drone.
The final mission is to retrieve cargo on board a ship fleeing at sea through autonomous collaboration between unmanned ships and unmanned aerial vehicles without human intervention. The overall mission consists the first stage of conducting the inspection to find the target ship among several ships moving at sea and the second stage of conducting the intervention mission to retrieve the cargoes on the deck of the ship. Each team was given a total of three opportunities, and the team that completed the highest-level mission in the shortest time during the three attempts received the highest score.
In the first attempt, KAIST was the only team to succeed in the first stage search mission, but the competition began in earnest as the Croatian team also completed the first stage mission in the second attempt. As the competition schedule was delayed due to strong winds and high waves that continued for several days, the organizers decided to hold the finals with the three teams, including the Team KAIST and the team from Croatia’s the University of Zagreb, which completed the first stage of the mission, and Team Fly-Eagle, a team of researcher from China and UAE that partially completed the first stage. The three teams were given the chance to proceed to the finals and try for the third attempt, and in the final competition, the Croatian team won, KAIST took the second place, and the combined team of UAE-China combined team took the third place. The final prize to be given for the winning team is set at $2 million with $500,000 for the runner-up team, and $250,000 for the third-place.
Professor Jinwhan Kim of the Department of Mechanical Engineering, who served as the advisor for Team KAIST, said, “I would like to express my gratitude and congratulations to the students who put in a huge academic and physical efforts in preparing for the competition over the past two years. I feel rewarded because, regardless of the results, every bit of efforts put into this up to this point will become the base of their confidence and a valuable asset in their growth into a great researcher.” Sol Han, a doctoral student in mechanical engineering who served as the team leader, said, “I am disappointed of how narrowly we missed out on winning at the end, but I am satisfied with the significance of the output we’ve got and I am grateful to the team members who worked hard together for that.”
HD Hyundai, Rainbow Robotics, Avikus, and FIMS also participated as sponsors for Team KAIST's campaign.
2024.02.09 View 11225 -
 Professor Kang’s Team Receives the IEEE Jack Newbauer Memorial Award
Professor Joonhyuk Kang of the School of Electrical Engineering received the IEEE Vehicular Technology Society’s 2021 Jack Neubauer Memorial Award for his team’s paper published in IEEE Transactions on Vehicular Technology. The Jack Neubauer Memorial Award recognizes the best paper published in the IEEE Transactions on Vehicular Technology journal in the last five years.
The team of authors, Professor Kang, Professor Sung-Ah Chung at Kyungpook National University, and Professor Osvaldo Simeone of King's College London reported their research titled Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning in IEEE Transactions on Vehicular Technology, Vol. 67, No. 3, pp. 2049-2063, in March 2018.
Their paper shows how the trajectory of aircraft is optimized and resources are allocated when unmanned aerial vehicles perform edge computing to help mobile device calculations. This paper has currently recorded nearly 400 citations (based on Google Scholar). "We are very happy to see the results of proposing edge computing using unmanned aerial vehicles by applying optimization theory, and conducting research on trajectory and resource utilization of unmanned aerial vehicles that minimize power consumption," said Professor Kang.
2021.07.12 View 8370
Professor Kang’s Team Receives the IEEE Jack Newbauer Memorial Award
Professor Joonhyuk Kang of the School of Electrical Engineering received the IEEE Vehicular Technology Society’s 2021 Jack Neubauer Memorial Award for his team’s paper published in IEEE Transactions on Vehicular Technology. The Jack Neubauer Memorial Award recognizes the best paper published in the IEEE Transactions on Vehicular Technology journal in the last five years.
The team of authors, Professor Kang, Professor Sung-Ah Chung at Kyungpook National University, and Professor Osvaldo Simeone of King's College London reported their research titled Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning in IEEE Transactions on Vehicular Technology, Vol. 67, No. 3, pp. 2049-2063, in March 2018.
Their paper shows how the trajectory of aircraft is optimized and resources are allocated when unmanned aerial vehicles perform edge computing to help mobile device calculations. This paper has currently recorded nearly 400 citations (based on Google Scholar). "We are very happy to see the results of proposing edge computing using unmanned aerial vehicles by applying optimization theory, and conducting research on trajectory and resource utilization of unmanned aerial vehicles that minimize power consumption," said Professor Kang.
2021.07.12 View 8370 -
 A Firefighter Drone That Flies and Crawls Up Walls
KAIST researchers developed a wall-climbing scout drone to fight fires in high-rises, finding the source of the fires and locating people trapped inside.
The 1974 American disaster film Towering Inferno depicted well the earnest struggles of firefighters engaged in ending a fire at a 138-story skyscraper. To this day, fires at high-rise buildings are considered one of the most dangerous disasters.
Skyscraper fires are particularly difficult to contain because of their ability to spread rapidly in high-occupant density spaces and the challenge of fighting fires in the buildings’ complex vertical structure. Accessibility to skyscrapers at the time of the fire is limited, and it is hard to assess the initial situation.
A research team at KAIST led by Professor Hyun Myung of the Civil and Environmental Engineering Department developed an unmanned aerial vehicle, named the Fireproof Aerial RObot System (FAROS), which detects fires in skyscrapers, searches the inside of the building, and transfers data in real time from fire scenes to the ground station.
As an extended version of Climbing Aerial RObot System (CAROS) that was created in 2014 by the research team, the FAROS can also fly and climb walls.
The FAROS, whose movements rely on a quadrotor system, can freely change its flight mode into a spider’s crawling on walls, and vice versa, facilitating unimpeded navigation in the labyrinth of narrow spaces filled with debris and rubble inside the blazing building.
The drone “estimates” its pose by utilizing a 2-D laser scanner, an altimeter, and an Inertia Measurement Unit sensor to navigate autonomously. With the localization result and using a thermal-imaging camera to recognize objects or people inside a building, the FAROS can also detect and find the fire-ignition point by employing dedicated image-processing technology.
The FAROS is fireproof and flame-retardant. The drone’s body is covered with aramid fibers to protect its electric and mechanical components from the direct effects of the flame. The aramid fiber skin also has a buffer of air underneath it, and a thermoelectric cooling system based on the Peltier effect to help maintain the air layer within a specific temperature range.
The research team demonstrated the feasibility of the localization system and wall-climbing mechanism in a smoky indoor environment. The fireproof test showed that the drone could endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
Professor Myung said, “As cities become more crowded with skyscrapers and super structures, fire incidents in these high-rise buildings are life-threatening massive disasters. The FAROS can be aptly deployed to the disaster site at an early stage of such incidents to minimize the damage and maximize the safety and efficiency of rescue mission.”
The research team has recently started to enhance the performance of the fireproof design for the exteroceptive sensors including a 2-D laser scanner and a thermal-imaging camera because those sensors could be more exposed to fire than other inside sensors and electric components.
This research was funded by the KAIST Initiative for Disaster Studies and the KAIST Institute.
YouTube link: https://youtu.be/gPNRZi0EPQw
Picture 1: Demonstration of Wall-climbing
The Fireproof Aerial RObot System (FAROS) is a wall-climbing scout drone developed to conduct explorations into the site of skyscraper fires. It has an ability to climb walls in smoky, narrow spaces inside buildings.
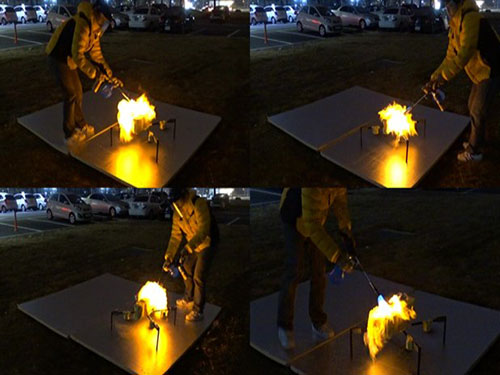
Figure 2: An Ability to Withstand Fires
The FAROS can endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
2016.01.20 View 15874
A Firefighter Drone That Flies and Crawls Up Walls
KAIST researchers developed a wall-climbing scout drone to fight fires in high-rises, finding the source of the fires and locating people trapped inside.
The 1974 American disaster film Towering Inferno depicted well the earnest struggles of firefighters engaged in ending a fire at a 138-story skyscraper. To this day, fires at high-rise buildings are considered one of the most dangerous disasters.
Skyscraper fires are particularly difficult to contain because of their ability to spread rapidly in high-occupant density spaces and the challenge of fighting fires in the buildings’ complex vertical structure. Accessibility to skyscrapers at the time of the fire is limited, and it is hard to assess the initial situation.
A research team at KAIST led by Professor Hyun Myung of the Civil and Environmental Engineering Department developed an unmanned aerial vehicle, named the Fireproof Aerial RObot System (FAROS), which detects fires in skyscrapers, searches the inside of the building, and transfers data in real time from fire scenes to the ground station.
As an extended version of Climbing Aerial RObot System (CAROS) that was created in 2014 by the research team, the FAROS can also fly and climb walls.
The FAROS, whose movements rely on a quadrotor system, can freely change its flight mode into a spider’s crawling on walls, and vice versa, facilitating unimpeded navigation in the labyrinth of narrow spaces filled with debris and rubble inside the blazing building.
The drone “estimates” its pose by utilizing a 2-D laser scanner, an altimeter, and an Inertia Measurement Unit sensor to navigate autonomously. With the localization result and using a thermal-imaging camera to recognize objects or people inside a building, the FAROS can also detect and find the fire-ignition point by employing dedicated image-processing technology.
The FAROS is fireproof and flame-retardant. The drone’s body is covered with aramid fibers to protect its electric and mechanical components from the direct effects of the flame. The aramid fiber skin also has a buffer of air underneath it, and a thermoelectric cooling system based on the Peltier effect to help maintain the air layer within a specific temperature range.
The research team demonstrated the feasibility of the localization system and wall-climbing mechanism in a smoky indoor environment. The fireproof test showed that the drone could endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
Professor Myung said, “As cities become more crowded with skyscrapers and super structures, fire incidents in these high-rise buildings are life-threatening massive disasters. The FAROS can be aptly deployed to the disaster site at an early stage of such incidents to minimize the damage and maximize the safety and efficiency of rescue mission.”
The research team has recently started to enhance the performance of the fireproof design for the exteroceptive sensors including a 2-D laser scanner and a thermal-imaging camera because those sensors could be more exposed to fire than other inside sensors and electric components.
This research was funded by the KAIST Initiative for Disaster Studies and the KAIST Institute.
YouTube link: https://youtu.be/gPNRZi0EPQw
Picture 1: Demonstration of Wall-climbing
The Fireproof Aerial RObot System (FAROS) is a wall-climbing scout drone developed to conduct explorations into the site of skyscraper fires. It has an ability to climb walls in smoky, narrow spaces inside buildings.
Figure 2: An Ability to Withstand Fires
The FAROS can endure the heat of over 1,000° Celsius from butane gas and ethanol aerosol flames for over one minute.
2016.01.20 View 15874 -
 Professor Shim Featured with His Drone System in IEEE Spectrum
The IEEE Spectrum, a technology and science magazine published by the Institute of Electrical and Electronics Engineers (IEEE), featured an article of KAIST’s autonomous unmanned aerial vehicles (UAVs) entitled “South Korea Prepares for Drone vs. Drone Combat,” posted on April 1, 2015.
The article introduces the anti-drone defense system being developed by Professor “David” Hyunchul Shim of the Department of Aerospace Engineering at KAIST. With the goal of developing guard drones that can detect and capture unknown UAVs, the anti-drone defense system consists of reconnaissance drones, agile multi-rotor UAVs equipped with nets which are dropped to snare enemy drones, and transport UAVs to carry smaller drones.
Professor Shim currently leads KAIST’s Unmanned System Research Group (USRG, http://unmanned.kaist.ac.kr/) and Center of Field Robotics for Innovation, Exploration, aNd Defense (C-FRIEND).
For the article, please go to http://spectrum.ieee.org/automaton/robotics/aerial-robots/south-korea-drone-vs-drone.
2015.04.02 View 13946
Professor Shim Featured with His Drone System in IEEE Spectrum
The IEEE Spectrum, a technology and science magazine published by the Institute of Electrical and Electronics Engineers (IEEE), featured an article of KAIST’s autonomous unmanned aerial vehicles (UAVs) entitled “South Korea Prepares for Drone vs. Drone Combat,” posted on April 1, 2015.
The article introduces the anti-drone defense system being developed by Professor “David” Hyunchul Shim of the Department of Aerospace Engineering at KAIST. With the goal of developing guard drones that can detect and capture unknown UAVs, the anti-drone defense system consists of reconnaissance drones, agile multi-rotor UAVs equipped with nets which are dropped to snare enemy drones, and transport UAVs to carry smaller drones.
Professor Shim currently leads KAIST’s Unmanned System Research Group (USRG, http://unmanned.kaist.ac.kr/) and Center of Field Robotics for Innovation, Exploration, aNd Defense (C-FRIEND).
For the article, please go to http://spectrum.ieee.org/automaton/robotics/aerial-robots/south-korea-drone-vs-drone.
2015.04.02 View 13946