ANG
-
 KAIST Invites World-Renowned Scholars, Elevating Global Competitiveness
< Photo 1. (From left) Professor John Rogers, Professor Gregg Rothermel, Dr. Sang H. Choi >
KAIST announced on June 27th that it has appointed three world-renowned scholars, including Professor John A. Rogers of Northwestern University, USA, as Invited Distinguished Professors in key departments such as Materials Science and Engineering.
Professor John A. Rogers (Northwestern University, USA) will be working with the Department of Materials Science and Engineering from July 2025 to June 2028 with Professor Gregg Rothermel (North Carolina State University, USA) working with the School of Computing from August 2025 to July 2026, and Dr. Sang H. Choi (NASA Langley Research Center, USA) with the Department of Aerospace Engineering from May 2025 to April 2028.
Professor John A. Rogers, a person of global authority in the field of bio-integrated electronics, has been leading advanced convergence technologies such as flexible electronics, smart skin, and implantable sensors. His significant impact on academia and industry is evident through over 900 papers published in top-tier academic journals like Science, Nature, and Cell, and he comes in an H-index of 240*. His research group, the Rogers Research Group at Northwestern University, focuses on "Science that brings Solutions to Society," encompassing areas such as bio-integrated microsystems and unconventional nanofabrication techniques. He is the founding Director of the Querrey-Simpson Institute of Bioelectronics at Northwestern University.
* H-index 240: An H-index is a measurement used to assess the research productivity and impact of an individual authors. H-index 240 means that 240 or more papers have been cited at least 240 times each, indicating a significant impact and the presumable status as a world-class scholar.
The Department of Materials Science and Engineering plans to further enhance its research capabilities in next-generation bio-implantable materials and wearable devices and boost its global competitiveness through the invitation of Professor Rogers. In particular, it aims to create strong research synergies by linking with the development of bio-convergence interface materials, a core task of the Leading Research Center (ERC, total research budget of 13.5 billion KRW over 7 years) led by Professor Kun-Jae Lee.
Professor Gregg Rothermel, a world-renowned scholar in software engineering, was ranked second among the top 50 global researchers by Communications of the ACM. For over 30 years, he has conducted practical research to improve software reliability and quality. He has achieved influential research outcomes through collaborations with global companies such as Boeing, Microsoft, and Lockheed Martin. Dr. Rothermel's research at North Carolina State University focuses on software engineering and program analysis, with significant contributions through initiatives like the ESQuaReD Laboratory and the Software-Artifact Infrastructure Repository (SIR).
The School of Computing plans to strengthen its research capabilities in software engineering and conduct collaborative research on software design and testing to enhance the reliability and safety of AI-based software systems through the invitation of Professor Gregg Rothermel. In particular, he is expected to participate in the Big Data Edge-Cloud Service Research Center (ITRC, total research budget of 6.7 billion KRW over 8 years) led by Professor In-Young Ko of the School of Computing, and the Research on Improving Complex Mobility Safety (SafetyOps, Digital Columbus Project, total research budget of 3.5 billion KRW over 8 years), contributing to resolving uncertainties in machine learning-based AI software and advancing technology.
Dr. Sang H. Choi, a global expert in space exploration and energy harvesting, has worked at NASA Langley Research Center for over 40 years, authoring over 200 papers and reports, holding 45 patents, and receiving 71 awards from NASA. In 2022, he was inducted into the 'Inventors Hall of Fame' as part of NASA's Technology Transfer Program. This is a rare honor, recognizing researchers who have contributed to the private sector dissemination of space exploration technology, with only 35 individuals worldwide selected to date. Dr. Choi's extensive work at NASA includes research on advanced electronic and energetic materials, satellite sensors, and various nano-technologies.
Dr. Choi plans to collaborate with Associate Professor Hyun-Jung Kim (former NASA Research Scientist, 2009-2024), who joined the Department of Aerospace Engineering in September of 2024, to lead the development of core technologies for lunar exploration (energy sources, sensing, in-situ resource utilization ISRU).
KAIST President Kwang Hyung Lee stated, "It is very meaningful to be able to invite these world-class scholars. Through these appointments, KAIST will further strengthen its global competitiveness in research in the fields of advanced convergence technology such as bio-convergence electronics, AI software engineering, and space exploration, securing our position as the leader of global innovations."
2025.06.27 View 434
KAIST Invites World-Renowned Scholars, Elevating Global Competitiveness
< Photo 1. (From left) Professor John Rogers, Professor Gregg Rothermel, Dr. Sang H. Choi >
KAIST announced on June 27th that it has appointed three world-renowned scholars, including Professor John A. Rogers of Northwestern University, USA, as Invited Distinguished Professors in key departments such as Materials Science and Engineering.
Professor John A. Rogers (Northwestern University, USA) will be working with the Department of Materials Science and Engineering from July 2025 to June 2028 with Professor Gregg Rothermel (North Carolina State University, USA) working with the School of Computing from August 2025 to July 2026, and Dr. Sang H. Choi (NASA Langley Research Center, USA) with the Department of Aerospace Engineering from May 2025 to April 2028.
Professor John A. Rogers, a person of global authority in the field of bio-integrated electronics, has been leading advanced convergence technologies such as flexible electronics, smart skin, and implantable sensors. His significant impact on academia and industry is evident through over 900 papers published in top-tier academic journals like Science, Nature, and Cell, and he comes in an H-index of 240*. His research group, the Rogers Research Group at Northwestern University, focuses on "Science that brings Solutions to Society," encompassing areas such as bio-integrated microsystems and unconventional nanofabrication techniques. He is the founding Director of the Querrey-Simpson Institute of Bioelectronics at Northwestern University.
* H-index 240: An H-index is a measurement used to assess the research productivity and impact of an individual authors. H-index 240 means that 240 or more papers have been cited at least 240 times each, indicating a significant impact and the presumable status as a world-class scholar.
The Department of Materials Science and Engineering plans to further enhance its research capabilities in next-generation bio-implantable materials and wearable devices and boost its global competitiveness through the invitation of Professor Rogers. In particular, it aims to create strong research synergies by linking with the development of bio-convergence interface materials, a core task of the Leading Research Center (ERC, total research budget of 13.5 billion KRW over 7 years) led by Professor Kun-Jae Lee.
Professor Gregg Rothermel, a world-renowned scholar in software engineering, was ranked second among the top 50 global researchers by Communications of the ACM. For over 30 years, he has conducted practical research to improve software reliability and quality. He has achieved influential research outcomes through collaborations with global companies such as Boeing, Microsoft, and Lockheed Martin. Dr. Rothermel's research at North Carolina State University focuses on software engineering and program analysis, with significant contributions through initiatives like the ESQuaReD Laboratory and the Software-Artifact Infrastructure Repository (SIR).
The School of Computing plans to strengthen its research capabilities in software engineering and conduct collaborative research on software design and testing to enhance the reliability and safety of AI-based software systems through the invitation of Professor Gregg Rothermel. In particular, he is expected to participate in the Big Data Edge-Cloud Service Research Center (ITRC, total research budget of 6.7 billion KRW over 8 years) led by Professor In-Young Ko of the School of Computing, and the Research on Improving Complex Mobility Safety (SafetyOps, Digital Columbus Project, total research budget of 3.5 billion KRW over 8 years), contributing to resolving uncertainties in machine learning-based AI software and advancing technology.
Dr. Sang H. Choi, a global expert in space exploration and energy harvesting, has worked at NASA Langley Research Center for over 40 years, authoring over 200 papers and reports, holding 45 patents, and receiving 71 awards from NASA. In 2022, he was inducted into the 'Inventors Hall of Fame' as part of NASA's Technology Transfer Program. This is a rare honor, recognizing researchers who have contributed to the private sector dissemination of space exploration technology, with only 35 individuals worldwide selected to date. Dr. Choi's extensive work at NASA includes research on advanced electronic and energetic materials, satellite sensors, and various nano-technologies.
Dr. Choi plans to collaborate with Associate Professor Hyun-Jung Kim (former NASA Research Scientist, 2009-2024), who joined the Department of Aerospace Engineering in September of 2024, to lead the development of core technologies for lunar exploration (energy sources, sensing, in-situ resource utilization ISRU).
KAIST President Kwang Hyung Lee stated, "It is very meaningful to be able to invite these world-class scholars. Through these appointments, KAIST will further strengthen its global competitiveness in research in the fields of advanced convergence technology such as bio-convergence electronics, AI software engineering, and space exploration, securing our position as the leader of global innovations."
2025.06.27 View 434 -
 “One Experiment Is All It Takes”: KAIST Team Revolutionizes Drug Interaction Testing, Replacing 60,000 Studies
A groundbreaking new method developed by researchers at KAIST and Chungnam National University could drastically streamline drug interaction testing — replacing dozens of traditional experiments with just one.
The research, led by Professor Jae Kyoung Kim of KAIST Department of Mathematical Sciences & IBS Biomedical Mathematics Group and Professor Sang Kyum Kim of Chungnam National University's College of Pharmacy, introduces a novel analysis technique called 50-BOA, published in Nature Communications on June 5, 2025.
< Photo 1. (From left) Professor Sang Kyum Kim (Chungnam National University College of Pharmacy, co-corresponding author), Dr. Yun Min Song (IBS Biomedical Mathematics Group, formerly KAIST Department of Mathematical Sciences, co-first author), undergraduate student Hyeong Jun Jang (KAIST, co-first author), Professor Jae Kyoung Kim (KAIST and IBS Biomedical Mathematics Group, co-corresponding author) (Top left in the bubble) Professor Hwi-yeol Yun (Chungnam National University College of Pharmacy, co-author) >
For decades, scientists have had to repeat drug inhibition experiments across a wide range of concentrations to estimate inhibition constants — a process seen in over 60,000 scientific publications. But the KAIST-led team discovered that a single, well-chosen inhibitor concentration can yield even more accurate results.
< Figure 1. Graphical summary of 50-BOA. 50-BOA improves the accuracy and efficiency of inhibition constant estimation by using only a single inhibitor concentration instead of the traditionally used method of employing multiple inhibitor concentrations. >
“This approach challenges long-standing assumptions in experimental pharmacology,” says Prof. Kim. “It shows how mathematics can fundamentally redesign life science experiments.”
By mathematically analyzing the sources of error in conventional methods, the team found that over half the data typically collected adds no value or even skews results. Their new method not only cuts experimental effort by over 75%, but also enhances reproducibility and accuracy.
To help researchers adopt the method quickly, the team developed a user-friendly tool that takes simple Excel files as input, now freely available on GitHub:
☞ https://github.com/Mathbiomed/50-BOA
< Figure 2. The MATLAB and R package of 50-BOA at GitHub >
The work holds promise for faster and more reliable drug development, especially in assessing potential interactions in combination therapies. The U.S. FDA already emphasizes the importance of accurate enzyme inhibition assessment during early-stage drug evaluation — and this method could soon become a new gold standard.
2025.06.16 View 1406
“One Experiment Is All It Takes”: KAIST Team Revolutionizes Drug Interaction Testing, Replacing 60,000 Studies
A groundbreaking new method developed by researchers at KAIST and Chungnam National University could drastically streamline drug interaction testing — replacing dozens of traditional experiments with just one.
The research, led by Professor Jae Kyoung Kim of KAIST Department of Mathematical Sciences & IBS Biomedical Mathematics Group and Professor Sang Kyum Kim of Chungnam National University's College of Pharmacy, introduces a novel analysis technique called 50-BOA, published in Nature Communications on June 5, 2025.
< Photo 1. (From left) Professor Sang Kyum Kim (Chungnam National University College of Pharmacy, co-corresponding author), Dr. Yun Min Song (IBS Biomedical Mathematics Group, formerly KAIST Department of Mathematical Sciences, co-first author), undergraduate student Hyeong Jun Jang (KAIST, co-first author), Professor Jae Kyoung Kim (KAIST and IBS Biomedical Mathematics Group, co-corresponding author) (Top left in the bubble) Professor Hwi-yeol Yun (Chungnam National University College of Pharmacy, co-author) >
For decades, scientists have had to repeat drug inhibition experiments across a wide range of concentrations to estimate inhibition constants — a process seen in over 60,000 scientific publications. But the KAIST-led team discovered that a single, well-chosen inhibitor concentration can yield even more accurate results.
< Figure 1. Graphical summary of 50-BOA. 50-BOA improves the accuracy and efficiency of inhibition constant estimation by using only a single inhibitor concentration instead of the traditionally used method of employing multiple inhibitor concentrations. >
“This approach challenges long-standing assumptions in experimental pharmacology,” says Prof. Kim. “It shows how mathematics can fundamentally redesign life science experiments.”
By mathematically analyzing the sources of error in conventional methods, the team found that over half the data typically collected adds no value or even skews results. Their new method not only cuts experimental effort by over 75%, but also enhances reproducibility and accuracy.
To help researchers adopt the method quickly, the team developed a user-friendly tool that takes simple Excel files as input, now freely available on GitHub:
☞ https://github.com/Mathbiomed/50-BOA
< Figure 2. The MATLAB and R package of 50-BOA at GitHub >
The work holds promise for faster and more reliable drug development, especially in assessing potential interactions in combination therapies. The U.S. FDA already emphasizes the importance of accurate enzyme inhibition assessment during early-stage drug evaluation — and this method could soon become a new gold standard.
2025.06.16 View 1406 -
 KAIST Successfully Develops High-Performance Water Electrolysis Without Platinum, Bringing Hydrogen Economy Closer
< Photo 1. (Front row, from left) Jeesoo Park (Ph.D. Candidate), Professor Hee-Tak Kim (Back row, from left) Kyunghwa Seok (Ph.D. Candidate), Dr. Gisu Doo, Euntaek Oh (Ph.D. Candidate) >
Hydrogen is gaining attention as a clean energy source that emits no carbon. Among various methods, water electrolysis, which splits water into hydrogen and oxygen using electricity, is recognized as an eco-friendly hydrogen production method. Specifically, proton exchange membrane water electrolysis (PEMWE) is considered a next-generation hydrogen production technology due to its ability to produce high-purity hydrogen at high pressure. However, existing PEMWE technology has faced limitations in commercialization due to its heavy reliance on expensive precious metal catalysts and coating materials. Korean researchers have now proposed a new solution to address these technical and economic bottlenecks.
KAIST (President Kwang Hyung Lee) announced on June 11th that a research team led by Professor Hee-Tak Kim of the Department of Chemical and Biomolecular Engineering, in a joint study with Dr. Gisu Doo of the Korea Institute of Energy Research (KIER, President Chang-keun Lee), has developed a next-generation water electrolysis technology that achieves high performance without the need for expensive platinum (Pt) coating.
The research team focused on the primary reason why 'iridium oxide (IrOx),' a highly active catalyst for water electrolysis electrodes, fails to perform optimally. They found that this is due to inefficient electron transfer and, for the first time in the world, demonstrated that performance can be maximized simply by controlling the catalyst particle size.
In this study, it was revealed that the reason iridium oxide catalysts do not exhibit excellent performance without platinum coating is due to 'electron transport resistance' that occurs at the interface between the catalyst, the ion conductor (hereinafter referred to as ionomer), and the Ti (titanium) substrate—core components inherently used together in water electrolysis electrodes.
Specifically, they identified that the 'pinch-off' phenomenon, where the electron pathway is blocked between the catalyst, ionomer, and titanium substrate, is the critical cause of reduced conductivity. The ionomer has properties close to an electron insulator, thereby hindering electron flow when it surrounds catalyst particles. Furthermore, when the ionomer comes into contact with the titanium substrate, an electron barrier forms on the surface oxide layer of the titanium substrate, significantly increasing resistance.
< Figure 1. Infographic related to electron transport resistance at the catalyst layer/diffusion layer interface >
To address this, the research team fabricated and compared catalysts of various particle sizes. Through single-cell evaluation and multiphysics simulations, they demonstrated, for the first time globally, that when iridium oxide catalyst particles with a size of 20 nanometers (nm) or larger are used, the ionomer mixed region decreases, ensuring an electron pathway and restoring conductivity.
Moreover, they successfully optimized the interfacial structure through precise design, simultaneously ensuring both reactivity and electron transport. This achievement demonstrated that the previously unavoidable trade-off between catalyst activity and conductivity can be overcome through meticulous interfacial design.
This breakthrough is expected to be a significant milestone not only for the development of high-performance catalyst materials but also for the future commercialization of proton exchange membrane water electrolysis systems that can achieve high efficiency while drastically reducing the amount of precious metals used.
Professor Hee-Tak Kim stated, "This research presents a new interface design strategy that can resolve the interfacial conductivity problem, which was a bottleneck in high-performance water electrolysis technology." He added, "By securing high performance even without expensive materials like platinum, it will be a stepping stone closer to realizing a hydrogen economy."
This research, with Jeesoo Park, a Ph.D. student from the Department of Chemical and Biomolecular Engineering at KAIST, as the first author, was published on June 7th in 'Energy & Environmental Science' (IF: 32.4, 2025), a leading international journal in the energy and environmental fields, and was recognized for its innovativeness and impact. (Paper title: On the interface electron transport problem of highly active IrOx catalysts, DOI: 10.1039/D4EE05816J).
This research was supported by the New and Renewable Energy Core Technology Development Project of the Ministry of Trade, Industry and Energy.
2025.06.11 View 1690
KAIST Successfully Develops High-Performance Water Electrolysis Without Platinum, Bringing Hydrogen Economy Closer
< Photo 1. (Front row, from left) Jeesoo Park (Ph.D. Candidate), Professor Hee-Tak Kim (Back row, from left) Kyunghwa Seok (Ph.D. Candidate), Dr. Gisu Doo, Euntaek Oh (Ph.D. Candidate) >
Hydrogen is gaining attention as a clean energy source that emits no carbon. Among various methods, water electrolysis, which splits water into hydrogen and oxygen using electricity, is recognized as an eco-friendly hydrogen production method. Specifically, proton exchange membrane water electrolysis (PEMWE) is considered a next-generation hydrogen production technology due to its ability to produce high-purity hydrogen at high pressure. However, existing PEMWE technology has faced limitations in commercialization due to its heavy reliance on expensive precious metal catalysts and coating materials. Korean researchers have now proposed a new solution to address these technical and economic bottlenecks.
KAIST (President Kwang Hyung Lee) announced on June 11th that a research team led by Professor Hee-Tak Kim of the Department of Chemical and Biomolecular Engineering, in a joint study with Dr. Gisu Doo of the Korea Institute of Energy Research (KIER, President Chang-keun Lee), has developed a next-generation water electrolysis technology that achieves high performance without the need for expensive platinum (Pt) coating.
The research team focused on the primary reason why 'iridium oxide (IrOx),' a highly active catalyst for water electrolysis electrodes, fails to perform optimally. They found that this is due to inefficient electron transfer and, for the first time in the world, demonstrated that performance can be maximized simply by controlling the catalyst particle size.
In this study, it was revealed that the reason iridium oxide catalysts do not exhibit excellent performance without platinum coating is due to 'electron transport resistance' that occurs at the interface between the catalyst, the ion conductor (hereinafter referred to as ionomer), and the Ti (titanium) substrate—core components inherently used together in water electrolysis electrodes.
Specifically, they identified that the 'pinch-off' phenomenon, where the electron pathway is blocked between the catalyst, ionomer, and titanium substrate, is the critical cause of reduced conductivity. The ionomer has properties close to an electron insulator, thereby hindering electron flow when it surrounds catalyst particles. Furthermore, when the ionomer comes into contact with the titanium substrate, an electron barrier forms on the surface oxide layer of the titanium substrate, significantly increasing resistance.
< Figure 1. Infographic related to electron transport resistance at the catalyst layer/diffusion layer interface >
To address this, the research team fabricated and compared catalysts of various particle sizes. Through single-cell evaluation and multiphysics simulations, they demonstrated, for the first time globally, that when iridium oxide catalyst particles with a size of 20 nanometers (nm) or larger are used, the ionomer mixed region decreases, ensuring an electron pathway and restoring conductivity.
Moreover, they successfully optimized the interfacial structure through precise design, simultaneously ensuring both reactivity and electron transport. This achievement demonstrated that the previously unavoidable trade-off between catalyst activity and conductivity can be overcome through meticulous interfacial design.
This breakthrough is expected to be a significant milestone not only for the development of high-performance catalyst materials but also for the future commercialization of proton exchange membrane water electrolysis systems that can achieve high efficiency while drastically reducing the amount of precious metals used.
Professor Hee-Tak Kim stated, "This research presents a new interface design strategy that can resolve the interfacial conductivity problem, which was a bottleneck in high-performance water electrolysis technology." He added, "By securing high performance even without expensive materials like platinum, it will be a stepping stone closer to realizing a hydrogen economy."
This research, with Jeesoo Park, a Ph.D. student from the Department of Chemical and Biomolecular Engineering at KAIST, as the first author, was published on June 7th in 'Energy & Environmental Science' (IF: 32.4, 2025), a leading international journal in the energy and environmental fields, and was recognized for its innovativeness and impact. (Paper title: On the interface electron transport problem of highly active IrOx catalysts, DOI: 10.1039/D4EE05816J).
This research was supported by the New and Renewable Energy Core Technology Development Project of the Ministry of Trade, Industry and Energy.
2025.06.11 View 1690 -
 A 10-Month Journey of Tiny Flaps Completed: A Special Family Returns to KAIST Duck Pond
On the morning of June 9, 2025, gentle activity stirred early around the KAIST campus duck pond. It was the day a special family of ducks—and two goslings—were to be released back into the pond after spending a month in a temporary shelter. One by one, the ducklings cautiously emerged from their box, waddling toward the water's edge and scanning their surroundings, followed closely by their mother.
< The landscape manager from the KAIST Facilities Team releases the ducks and goslings. >
The mother duck, once a rescued loner who couldn’t integrate with the flock, returned triumphantly as the head of a new family—caring for both ducklings and goslings. Students and faculty looked on quietly, welcoming them back and reflecting on their remarkable 10-month journey.
The story began in July 2024, as a student filed a report of spotting two ducklings wandering near the pond without a mother. Based on their soft down, flat beaks, and lack of fear around humans, it was presumed they had been abandoned. Professor Won Do Heo of the Department of Biological Sciences—affectionately known as the “Goose Dad”—and the KAIST Facilities Team quickly stepped in to rescue them. After about a month of care, the ducklings were released back into the pond.
< On June 9, the day of the release, KAIST President Kwang-Hyung Lee (left), the former “Goose Dad,” and Professor Won Do Heo (right), the current “Goose Dad,” watched the flock as they freely wobbled about. >
At first, the ducklings seemed to adapt, but they started distancing themselves from the established goose flock. One eventually disappeared, and the remaining duckling was found injured by the pond during winter. Although KAIST typically avoids making human interference in the natural ecosystem, an exception was made to save the young duck’s life. It was put under the care of Professor Heo and the Facilities Team to regain its health within a month.
In the spring, the healed duck began laying eggs. Professor Heo supported the process by adjusting its diet, avoiding further intervention. On Children’s Day, May 5, the duck’s eggs hatched. The once-isolated duck had become a mother. Ten days later, on May 15, four goslings also hatched from the resident goose flock. With new life flourishing, the pond was more vibrant than ever.
< Rescued baby goslings near the pond, alongside the duck family that took them in. The mother duck—once a vulnerable duckling herself—had grown strong enough to care for others in need. >
But just days later, the mother goose disappeared, and two goslings—still unable to swim—were found shivering by the pond. Dahyeon Byeon, a student from Seoul National University who came for a visit on that day, reported this upon sighting, prompting another rescue. The vulnerable goslings were brought to the shelter to stay with the duck family.
Initially, the interspecies cohabitation was uneasy. But the mother duck did not reject the goslings. Slowly, they began to eat and sleep together, forming a new kind of family. After a month, they were released together into the pond—and to everyone’s surprise, the existing goose flock accepted both the goslings and the duck family.
< A peaceful moment for the duck family. The baby goslings naturally followed the mother duck. >
It took ten months for this family to return. From abandonment and injury to healing, birth, and unexpected bonds, this was more than a story of survival. It was a journey of transformation. The duck family’s ten-month saga is a quiet miracle—written in small moments of crisis, care, and connection—and a lasting memory on the KAIST campus.
< The resident goose flock at KAIST’s pond naturally accepted the returning duck and goslings as part of their group. >
2025.06.10 View 1246
A 10-Month Journey of Tiny Flaps Completed: A Special Family Returns to KAIST Duck Pond
On the morning of June 9, 2025, gentle activity stirred early around the KAIST campus duck pond. It was the day a special family of ducks—and two goslings—were to be released back into the pond after spending a month in a temporary shelter. One by one, the ducklings cautiously emerged from their box, waddling toward the water's edge and scanning their surroundings, followed closely by their mother.
< The landscape manager from the KAIST Facilities Team releases the ducks and goslings. >
The mother duck, once a rescued loner who couldn’t integrate with the flock, returned triumphantly as the head of a new family—caring for both ducklings and goslings. Students and faculty looked on quietly, welcoming them back and reflecting on their remarkable 10-month journey.
The story began in July 2024, as a student filed a report of spotting two ducklings wandering near the pond without a mother. Based on their soft down, flat beaks, and lack of fear around humans, it was presumed they had been abandoned. Professor Won Do Heo of the Department of Biological Sciences—affectionately known as the “Goose Dad”—and the KAIST Facilities Team quickly stepped in to rescue them. After about a month of care, the ducklings were released back into the pond.
< On June 9, the day of the release, KAIST President Kwang-Hyung Lee (left), the former “Goose Dad,” and Professor Won Do Heo (right), the current “Goose Dad,” watched the flock as they freely wobbled about. >
At first, the ducklings seemed to adapt, but they started distancing themselves from the established goose flock. One eventually disappeared, and the remaining duckling was found injured by the pond during winter. Although KAIST typically avoids making human interference in the natural ecosystem, an exception was made to save the young duck’s life. It was put under the care of Professor Heo and the Facilities Team to regain its health within a month.
In the spring, the healed duck began laying eggs. Professor Heo supported the process by adjusting its diet, avoiding further intervention. On Children’s Day, May 5, the duck’s eggs hatched. The once-isolated duck had become a mother. Ten days later, on May 15, four goslings also hatched from the resident goose flock. With new life flourishing, the pond was more vibrant than ever.
< Rescued baby goslings near the pond, alongside the duck family that took them in. The mother duck—once a vulnerable duckling herself—had grown strong enough to care for others in need. >
But just days later, the mother goose disappeared, and two goslings—still unable to swim—were found shivering by the pond. Dahyeon Byeon, a student from Seoul National University who came for a visit on that day, reported this upon sighting, prompting another rescue. The vulnerable goslings were brought to the shelter to stay with the duck family.
Initially, the interspecies cohabitation was uneasy. But the mother duck did not reject the goslings. Slowly, they began to eat and sleep together, forming a new kind of family. After a month, they were released together into the pond—and to everyone’s surprise, the existing goose flock accepted both the goslings and the duck family.
< A peaceful moment for the duck family. The baby goslings naturally followed the mother duck. >
It took ten months for this family to return. From abandonment and injury to healing, birth, and unexpected bonds, this was more than a story of survival. It was a journey of transformation. The duck family’s ten-month saga is a quiet miracle—written in small moments of crisis, care, and connection—and a lasting memory on the KAIST campus.
< The resident goose flock at KAIST’s pond naturally accepted the returning duck and goslings as part of their group. >
2025.06.10 View 1246 -
 KAIST Succeeds in Real-Time Carbon Dioxide Monitoring Without Batteries or External Power
< (From left) Master's Student Gyurim Jang, Professor Kyeongha Kwon >
KAIST (President Kwang Hyung Lee) announced on June 9th that a research team led by Professor Kyeongha Kwon from the School of Electrical Engineering, in a joint study with Professor Hanjun Ryu's team at Chung-Ang University, has developed a self-powered wireless carbon dioxide (CO2) monitoring system. This innovative system harvests fine vibrational energy from its surroundings to periodically measure CO2 concentrations.
This breakthrough addresses a critical need in environmental monitoring: accurately understanding "how much" CO2 is being emitted to combat climate change and global warming. While CO2 monitoring technology is key to this, existing systems largely rely on batteries or wired power system, imposing limitations on installation and maintenance. The KAIST team tackled this by creating a self-powered wireless system that operates without external power.
The core of this new system is an "Inertia-driven Triboelectric Nanogenerator (TENG)" that converts vibrations (with amplitudes ranging from 20-4000 ㎛ and frequencies from 0-300 Hz) generated by industrial equipment or pipelines into electricity. This enables periodic CO2 concentration measurements and wireless transmission without the need for batteries.
< Figure 1. Concept and configuration of self-powered wireless CO2 monitoring system using fine vibration harvesting (a) System block diagram (b) Photo of fabricated system prototype >
The research team successfully amplified fine vibrations and induced resonance by combining spring-attached 4-stack TENGs. They achieved stable power production of 0.5 mW under conditions of 13 Hz and 0.56 g acceleration. The generated power was then used to operate a CO2 sensor and a Bluetooth Low Energy (BLE) system-on-a-chip (SoC).
Professor Kyeongha Kwon emphasized, "For efficient environmental monitoring, a system that can operate continuously without power limitations is essential." She explained, "In this research, we implemented a self-powered system that can periodically measure and wirelessly transmit CO2 concentrations based on the energy generated from an inertia-driven TENG." She added, "This technology can serve as a foundational technology for future self-powered environmental monitoring platforms integrating various sensors."
< Figure 2. TENG energy harvesting-based wireless CO2 sensing system operation results (c) Experimental setup (d) Measured CO2 concentration results powered by TENG and conventional DC power source >
This research was published on June 1st in the internationally renowned academic journal `Nano Energy (IF 16.8)`. Gyurim Jang, a master's student at KAIST, and Daniel Manaye Tiruneh, a master's student at Chung-Ang University, are the co-first authors of the paper.*Paper Title: Highly compact inertia-driven triboelectric nanogenerator for self-powered wireless CO2 monitoring via fine-vibration harvesting*DOI: 10.1016/j.nanoen.2025.110872
This research was supported by the Saudi Aramco-KAIST CO2 Management Center.
2025.06.09 View 47174
KAIST Succeeds in Real-Time Carbon Dioxide Monitoring Without Batteries or External Power
< (From left) Master's Student Gyurim Jang, Professor Kyeongha Kwon >
KAIST (President Kwang Hyung Lee) announced on June 9th that a research team led by Professor Kyeongha Kwon from the School of Electrical Engineering, in a joint study with Professor Hanjun Ryu's team at Chung-Ang University, has developed a self-powered wireless carbon dioxide (CO2) monitoring system. This innovative system harvests fine vibrational energy from its surroundings to periodically measure CO2 concentrations.
This breakthrough addresses a critical need in environmental monitoring: accurately understanding "how much" CO2 is being emitted to combat climate change and global warming. While CO2 monitoring technology is key to this, existing systems largely rely on batteries or wired power system, imposing limitations on installation and maintenance. The KAIST team tackled this by creating a self-powered wireless system that operates without external power.
The core of this new system is an "Inertia-driven Triboelectric Nanogenerator (TENG)" that converts vibrations (with amplitudes ranging from 20-4000 ㎛ and frequencies from 0-300 Hz) generated by industrial equipment or pipelines into electricity. This enables periodic CO2 concentration measurements and wireless transmission without the need for batteries.
< Figure 1. Concept and configuration of self-powered wireless CO2 monitoring system using fine vibration harvesting (a) System block diagram (b) Photo of fabricated system prototype >
The research team successfully amplified fine vibrations and induced resonance by combining spring-attached 4-stack TENGs. They achieved stable power production of 0.5 mW under conditions of 13 Hz and 0.56 g acceleration. The generated power was then used to operate a CO2 sensor and a Bluetooth Low Energy (BLE) system-on-a-chip (SoC).
Professor Kyeongha Kwon emphasized, "For efficient environmental monitoring, a system that can operate continuously without power limitations is essential." She explained, "In this research, we implemented a self-powered system that can periodically measure and wirelessly transmit CO2 concentrations based on the energy generated from an inertia-driven TENG." She added, "This technology can serve as a foundational technology for future self-powered environmental monitoring platforms integrating various sensors."
< Figure 2. TENG energy harvesting-based wireless CO2 sensing system operation results (c) Experimental setup (d) Measured CO2 concentration results powered by TENG and conventional DC power source >
This research was published on June 1st in the internationally renowned academic journal `Nano Energy (IF 16.8)`. Gyurim Jang, a master's student at KAIST, and Daniel Manaye Tiruneh, a master's student at Chung-Ang University, are the co-first authors of the paper.*Paper Title: Highly compact inertia-driven triboelectric nanogenerator for self-powered wireless CO2 monitoring via fine-vibration harvesting*DOI: 10.1016/j.nanoen.2025.110872
This research was supported by the Saudi Aramco-KAIST CO2 Management Center.
2025.06.09 View 47174 -
 Professor Hyun Myung's Team Wins First Place in a Challenge at ICRA by IEEE
< Photo 1. (From left) Daebeom Kim (Team Leader, Ph.D. student), Seungjae Lee (Ph.D. student), Seoyeon Jang (Ph.D. student), Jei Kong (Master's student), Professor Hyun Myung >
A team of the Urban Robotics Lab, led by Professor Hyun Myung from the KAIST School of Electrical Engineering, achieved a remarkable first-place overall victory in the Nothing Stands Still Challenge (NSS Challenge) 2025, held at the 2025 IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious robotics conference, from May 19 to 23 in Atlanta, USA.
The NSS Challenge was co-hosted by HILTI, a global construction company based in Liechtenstein, and Stanford University's Gradient Spaces Group. It is an expanded version of the HILTI SLAM (Simultaneous Localization and Mapping)* Challenge, which has been held since 2021, and is considered one of the most prominent challenges at 2025 IEEE ICRA.*SLAM: Refers to Simultaneous Localization and Mapping, a technology where robots, drones, autonomous vehicles, etc., determine their own position and simultaneously create a map of their surroundings.
< Photo 2. A scene from the oral presentation on the winning team's technology (Speakers: Seungjae Lee and Seoyeon Jang, Ph.D. candidates of KAIST School of Electrical Engineering) >
This challenge primarily evaluates how accurately and robustly LiDAR scan data, collected at various times, can be registered in situations with frequent structural changes, such as construction and industrial environments. In particular, it is regarded as a highly technical competition because it deals with multi-session localization and mapping (Multi-session SLAM) technology that responds to structural changes occurring over multiple timeframes, rather than just single-point registration accuracy.
The Urban Robotics Lab team secured first place overall, surpassing National Taiwan University (3rd place) and Northwestern Polytechnical University of China (2nd place) by a significant margin, with their unique localization and mapping technology that solves the problem of registering LiDAR data collected across multiple times and spaces. The winning team will be awarded a prize of $4,000.
< Figure 1. Example of Multiway-Registration for Registering Multiple Scans >
The Urban Robotics Lab team independently developed a multiway-registration framework that can robustly register multiple scans even without prior connection information. This framework consists of an algorithm for summarizing feature points within scans and finding correspondences (CubicFeat), an algorithm for performing global registration based on the found correspondences (Quatro), and an algorithm for refining results based on change detection (Chamelion). This combination of technologies ensures stable registration performance based on fixed structures, even in highly dynamic industrial environments.
< Figure 2. Example of Change Detection Using the Chamelion Algorithm>
LiDAR scan registration technology is a core component of SLAM (Simultaneous Localization And Mapping) in various autonomous systems such as autonomous vehicles, autonomous robots, autonomous walking systems, and autonomous flying vehicles.
Professor Hyun Myung of the School of Electrical Engineering stated, "This award-winning technology is evaluated as a case that simultaneously proves both academic value and industrial applicability by maximizing the performance of precisely estimating the relative positions between different scans even in complex environments. I am grateful to the students who challenged themselves and never gave up, even when many teams abandoned due to the high difficulty."
< Figure 3. Competition Result Board, Lower RMSE (Root Mean Squared Error) Indicates Higher Score (Unit: meters)>
The Urban Robotics Lab team first participated in the SLAM Challenge in 2022, winning second place among academic teams, and in 2023, they secured first place overall in the LiDAR category and first place among academic teams in the vision category.
2025.05.30 View 2525
Professor Hyun Myung's Team Wins First Place in a Challenge at ICRA by IEEE
< Photo 1. (From left) Daebeom Kim (Team Leader, Ph.D. student), Seungjae Lee (Ph.D. student), Seoyeon Jang (Ph.D. student), Jei Kong (Master's student), Professor Hyun Myung >
A team of the Urban Robotics Lab, led by Professor Hyun Myung from the KAIST School of Electrical Engineering, achieved a remarkable first-place overall victory in the Nothing Stands Still Challenge (NSS Challenge) 2025, held at the 2025 IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious robotics conference, from May 19 to 23 in Atlanta, USA.
The NSS Challenge was co-hosted by HILTI, a global construction company based in Liechtenstein, and Stanford University's Gradient Spaces Group. It is an expanded version of the HILTI SLAM (Simultaneous Localization and Mapping)* Challenge, which has been held since 2021, and is considered one of the most prominent challenges at 2025 IEEE ICRA.*SLAM: Refers to Simultaneous Localization and Mapping, a technology where robots, drones, autonomous vehicles, etc., determine their own position and simultaneously create a map of their surroundings.
< Photo 2. A scene from the oral presentation on the winning team's technology (Speakers: Seungjae Lee and Seoyeon Jang, Ph.D. candidates of KAIST School of Electrical Engineering) >
This challenge primarily evaluates how accurately and robustly LiDAR scan data, collected at various times, can be registered in situations with frequent structural changes, such as construction and industrial environments. In particular, it is regarded as a highly technical competition because it deals with multi-session localization and mapping (Multi-session SLAM) technology that responds to structural changes occurring over multiple timeframes, rather than just single-point registration accuracy.
The Urban Robotics Lab team secured first place overall, surpassing National Taiwan University (3rd place) and Northwestern Polytechnical University of China (2nd place) by a significant margin, with their unique localization and mapping technology that solves the problem of registering LiDAR data collected across multiple times and spaces. The winning team will be awarded a prize of $4,000.
< Figure 1. Example of Multiway-Registration for Registering Multiple Scans >
The Urban Robotics Lab team independently developed a multiway-registration framework that can robustly register multiple scans even without prior connection information. This framework consists of an algorithm for summarizing feature points within scans and finding correspondences (CubicFeat), an algorithm for performing global registration based on the found correspondences (Quatro), and an algorithm for refining results based on change detection (Chamelion). This combination of technologies ensures stable registration performance based on fixed structures, even in highly dynamic industrial environments.
< Figure 2. Example of Change Detection Using the Chamelion Algorithm>
LiDAR scan registration technology is a core component of SLAM (Simultaneous Localization And Mapping) in various autonomous systems such as autonomous vehicles, autonomous robots, autonomous walking systems, and autonomous flying vehicles.
Professor Hyun Myung of the School of Electrical Engineering stated, "This award-winning technology is evaluated as a case that simultaneously proves both academic value and industrial applicability by maximizing the performance of precisely estimating the relative positions between different scans even in complex environments. I am grateful to the students who challenged themselves and never gave up, even when many teams abandoned due to the high difficulty."
< Figure 3. Competition Result Board, Lower RMSE (Root Mean Squared Error) Indicates Higher Score (Unit: meters)>
The Urban Robotics Lab team first participated in the SLAM Challenge in 2022, winning second place among academic teams, and in 2023, they secured first place overall in the LiDAR category and first place among academic teams in the vision category.
2025.05.30 View 2525 -
 KAIST Develops Virtual Staining Technology for 3D Histopathology
Moving beyond traditional methods of observing thinly sliced and stained cancer tissues, a collaborative international research team led by KAIST has successfully developed a groundbreaking technology. This innovation uses advanced optical techniques combined with an artificial intelligence-based deep learning algorithm to create realistic, virtually stained 3D images of cancer tissue without the need for serial sectioning nor staining. This breakthrough is anticipated to pave the way for next-generation non-invasive pathological diagnosis.
< Photo 1. (From left) Juyeon Park (Ph.D. Candidate, Department of Physics), Professor YongKeun Park (Department of Physics) (Top left) Professor Su-Jin Shin (Gangnam Severance Hospital), Professor Tae Hyun Hwang (Vanderbilt University School of Medicine) >
KAIST (President Kwang Hyung Lee) announced on the 26th that a research team led by Professor YongKeun Park of the Department of Physics, in collaboration with Professor Su-Jin Shin's team at Yonsei University Gangnam Severance Hospital, Professor Tae Hyun Hwang's team at Mayo Clinic, and Tomocube's AI research team, has developed an innovative technology capable of vividly displaying the 3D structure of cancer tissues without separate staining.
For over 200 years, conventional pathology has relied on observing cancer tissues under a microscope, a method that only shows specific cross-sections of the 3D cancer tissue. This has limited the ability to understand the three-dimensional connections and spatial arrangements between cells.
To overcome this, the research team utilized holotomography (HT), an advanced optical technology, to measure the 3D refractive index information of tissues. They then integrated an AI-based deep learning algorithm to successfully generate virtual H&E* images.* H&E (Hematoxylin & Eosin): The most widely used staining method for observing pathological tissues. Hematoxylin stains cell nuclei blue, and eosin stains cytoplasm pink.
The research team quantitatively demonstrated that the images generated by this technology are highly similar to actual stained tissue images. Furthermore, the technology exhibited consistent performance across various organs and tissues, proving its versatility and reliability as a next-generation pathological analysis tool.
< Figure 1. Comparison of conventional 3D tissue pathology procedure and the 3D virtual H&E staining technology proposed in this study. The traditional method requires preparing and staining dozens of tissue slides, while the proposed technology can reduce the number of slides by up to 10 times and quickly generate H&E images without the staining process. >
Moreover, by validating the feasibility of this technology through joint research with hospitals and research institutions in Korea and the United States, utilizing Tomocube's holotomography equipment, the team demonstrated its potential for full-scale adoption in real-world pathological research settings.
Professor YongKeun Park stated, "This research marks a major advancement by transitioning pathological analysis from conventional 2D methods to comprehensive 3D imaging. It will greatly enhance biomedical research and clinical diagnostics, particularly in understanding cancer tumor boundaries and the intricate spatial arrangements of cells within tumor microenvironments."
< Figure 2. Results of AI-based 3D virtual H&E staining and quantitative analysis of pathological tissue. The virtually stained images enabled 3D reconstruction of key pathological features such as cell nuclei and glandular lumens. Based on this, various quantitative indicators, including cell nuclear distribution, volume, and surface area, could be extracted. >
This research, with Juyeon Park, a student of the Integrated Master’s and Ph.D. Program at KAIST, as the first author, was published online in the prestigious journal Nature Communications on May 22.
(Paper title: Revealing 3D microanatomical structures of unlabeled thick cancer tissues using holotomography and virtual H&E staining.
[https://doi.org/10.1038/s41467-025-59820-0]
This study was supported by the Leader Researcher Program of the National Research Foundation of Korea, the Global Industry Technology Cooperation Center Project of the Korea Institute for Advancement of Technology, and the Korea Health Industry Development Institute.
2025.05.26 View 2738
KAIST Develops Virtual Staining Technology for 3D Histopathology
Moving beyond traditional methods of observing thinly sliced and stained cancer tissues, a collaborative international research team led by KAIST has successfully developed a groundbreaking technology. This innovation uses advanced optical techniques combined with an artificial intelligence-based deep learning algorithm to create realistic, virtually stained 3D images of cancer tissue without the need for serial sectioning nor staining. This breakthrough is anticipated to pave the way for next-generation non-invasive pathological diagnosis.
< Photo 1. (From left) Juyeon Park (Ph.D. Candidate, Department of Physics), Professor YongKeun Park (Department of Physics) (Top left) Professor Su-Jin Shin (Gangnam Severance Hospital), Professor Tae Hyun Hwang (Vanderbilt University School of Medicine) >
KAIST (President Kwang Hyung Lee) announced on the 26th that a research team led by Professor YongKeun Park of the Department of Physics, in collaboration with Professor Su-Jin Shin's team at Yonsei University Gangnam Severance Hospital, Professor Tae Hyun Hwang's team at Mayo Clinic, and Tomocube's AI research team, has developed an innovative technology capable of vividly displaying the 3D structure of cancer tissues without separate staining.
For over 200 years, conventional pathology has relied on observing cancer tissues under a microscope, a method that only shows specific cross-sections of the 3D cancer tissue. This has limited the ability to understand the three-dimensional connections and spatial arrangements between cells.
To overcome this, the research team utilized holotomography (HT), an advanced optical technology, to measure the 3D refractive index information of tissues. They then integrated an AI-based deep learning algorithm to successfully generate virtual H&E* images.* H&E (Hematoxylin & Eosin): The most widely used staining method for observing pathological tissues. Hematoxylin stains cell nuclei blue, and eosin stains cytoplasm pink.
The research team quantitatively demonstrated that the images generated by this technology are highly similar to actual stained tissue images. Furthermore, the technology exhibited consistent performance across various organs and tissues, proving its versatility and reliability as a next-generation pathological analysis tool.
< Figure 1. Comparison of conventional 3D tissue pathology procedure and the 3D virtual H&E staining technology proposed in this study. The traditional method requires preparing and staining dozens of tissue slides, while the proposed technology can reduce the number of slides by up to 10 times and quickly generate H&E images without the staining process. >
Moreover, by validating the feasibility of this technology through joint research with hospitals and research institutions in Korea and the United States, utilizing Tomocube's holotomography equipment, the team demonstrated its potential for full-scale adoption in real-world pathological research settings.
Professor YongKeun Park stated, "This research marks a major advancement by transitioning pathological analysis from conventional 2D methods to comprehensive 3D imaging. It will greatly enhance biomedical research and clinical diagnostics, particularly in understanding cancer tumor boundaries and the intricate spatial arrangements of cells within tumor microenvironments."
< Figure 2. Results of AI-based 3D virtual H&E staining and quantitative analysis of pathological tissue. The virtually stained images enabled 3D reconstruction of key pathological features such as cell nuclei and glandular lumens. Based on this, various quantitative indicators, including cell nuclear distribution, volume, and surface area, could be extracted. >
This research, with Juyeon Park, a student of the Integrated Master’s and Ph.D. Program at KAIST, as the first author, was published online in the prestigious journal Nature Communications on May 22.
(Paper title: Revealing 3D microanatomical structures of unlabeled thick cancer tissues using holotomography and virtual H&E staining.
[https://doi.org/10.1038/s41467-025-59820-0]
This study was supported by the Leader Researcher Program of the National Research Foundation of Korea, the Global Industry Technology Cooperation Center Project of the Korea Institute for Advancement of Technology, and the Korea Health Industry Development Institute.
2025.05.26 View 2738 -
 KAIST School of Computing Unveils 'KRAFTON Building,' A Symbol of Collective Generosity
< (From the fifth from the left) Provost and Executive Vice President Gyun Min Lee, Auditor Eun Woo Lee, President Kwang-Hyung Lee, Dean of the School of Computing Seok-Young Ryu, former Krafton member and donor Woong-Hee Cho, Krafton Chairman Byung-Gyu Chang >
KAIST announced on May 20th the completion of the expansion building for its School of Computing, the "KRAFTON Building." The project began in June 2021 with an ₩11 billion donation from KRAFTON and its employees, eventually growing to ₩11.7 billion with contributions from 204 donors.
Designed as a "Pay It Forward" space, the building aims to enable alumni to pass on the gratitude they received from the school to their juniors and foster connection. Byung-Gyu Chang, Chairman of KRAFTON and a KAIST alumnus, expressed his joy, stating, "I am very pleased that the first building created by alumni donations within KAIST is now complete, and I hope it will continue to be a space for communication, challenges, and growth that connects to the next generation."
The completion ceremony, held today at 3 PM in front of the KRAFTON SoC (School of Computing) Building at KAIST's main campus, was attended by over 100 people, including Chairman Byung-Gyu Chang, KAIST President Kwang-Hyung Lee, and Dean Seok-Young Ryu of the KAIST School of Computing.
The building's inception dates back to June 2021, with an ₩11 billion donation from the gaming company KRAFTON and its current and former members, dedicated to nurturing future software talent at KAIST. Four alumni, including KRAFTON Chairman Byung-Gyu Chang, who graduated from the KAIST School of Computing, were the first to pledge donations. This initial act inspired more participants, leading to ₩5.5 billion in individual donations from a total of 11 people. KRAFTON Inc. then matched this amount, bringing the total donation to ₩11 billion.
Since 2021, KRAFTON Inc. has operated a "Matching Grant" program, a donation culture initiative driven by its members. This system allows the company to match funds voluntarily raised by its employees, aiming to encourage active social participation and the creation of social value among its members.
Following this, another 11 KAIST alumni from Devsisters Inc., famous for the Cookie Run series, joined the donation effort. This wave of generosity expanded to include a total of 204 participants, comprising graduates, alumni professors, and current students, acting as a catalyst for the spread of a donation culture within the campus. To date, approximately ₩11.7 billion has been raised for the expansion of the School of Computing building. Furthermore, small donations, including those from alumni and the general public, have continuously grown, reaching over 50,000 instances from 2021 to May 2025.
The funds raised through donations were used to construct a 2,000-pyeong (approximately 6,600 square meters) building for individuals who, like Chairman Byung-Gyu Chang, will unleash their potential and become global leaders. The building was named "KRAFTON SoC (KRAFTON SoC)," and KRAFTON Inc. has further pledged additional donations for the building's maintenance over the next 10 years.
The newly completed KRAFTON Building is a six-story structure. From the second floor up, it features research labs for 20 professors and graduate students to freely pursue their research, along with large lecture halls. The first floor is designed as a meeting place for current students, alumni, and seniors, serving as a space to remember those who came before them.
The four lecture halls on the first floor are designated as "Immersion Camp Classrooms." During the summer and winter sessions, these rooms will be used for intensive month-long courses focused on improving coding and collaboration skills. During regular semesters, they will be utilized for other lectures.
Additionally, to support the physical and mental well-being of those weary from study and research, the building includes a small café on the first floor, a fitness center on the second floor, a Pilates studio on the fifth floor, and a soundproof band practice room in the basement.
Dean Seok-Young Ryu of the School of Computing explained, "The motivation for this wave of donations began with gratitude for the excellent professors and wonderful students, the free and open communication, the comfortable acceptance of diversity among various members, and the time when we could fearlessly dream. We cannot fully repay those who provided us with such precious time and space, but instead, this will be a 'Pay It Forward' space, a space of connection, where we share this gratitude with our juniors."
Alumnus Byung-Gyu Chang shared, "KAIST is more than just an academic foundation for me; it's a meaningful place that helped me set the direction for my life. I am very happy that this space, born from the desire of KRAFTON's members and myself to give back the opportunities and learning we received to the next generation, is completed today. I hope this space becomes a small but warm echo for KAIST members who freely communicate, challenge themselves, and grow."
< Congratulatory speech by alumnus Byung-Gyu Chang >
President Kwang-Hyung Lee stated, "The KRAFTON SoC, the expanded building for the School of Computing, is not just a space; it is the culmination of the KAIST community spirit created by alumni, current students, and faculty. I sincerely thank everyone who participated in this meaningful donation, which demonstrates the power of sharing and connection."
< Commemorative speech by President Kwang-Hyung Lee >
On a related note, the KAIST Development Foundation is actively promoting the "TeamKAIST" campaign for the general public and KAIST alumni to meet more "Daddy Long-Legs" (benefactors) for KAIST.
Website: https://giving.kaist.ac.kr/ko/sub01/sub0103_1.php
2025.05.21 View 2005
KAIST School of Computing Unveils 'KRAFTON Building,' A Symbol of Collective Generosity
< (From the fifth from the left) Provost and Executive Vice President Gyun Min Lee, Auditor Eun Woo Lee, President Kwang-Hyung Lee, Dean of the School of Computing Seok-Young Ryu, former Krafton member and donor Woong-Hee Cho, Krafton Chairman Byung-Gyu Chang >
KAIST announced on May 20th the completion of the expansion building for its School of Computing, the "KRAFTON Building." The project began in June 2021 with an ₩11 billion donation from KRAFTON and its employees, eventually growing to ₩11.7 billion with contributions from 204 donors.
Designed as a "Pay It Forward" space, the building aims to enable alumni to pass on the gratitude they received from the school to their juniors and foster connection. Byung-Gyu Chang, Chairman of KRAFTON and a KAIST alumnus, expressed his joy, stating, "I am very pleased that the first building created by alumni donations within KAIST is now complete, and I hope it will continue to be a space for communication, challenges, and growth that connects to the next generation."
The completion ceremony, held today at 3 PM in front of the KRAFTON SoC (School of Computing) Building at KAIST's main campus, was attended by over 100 people, including Chairman Byung-Gyu Chang, KAIST President Kwang-Hyung Lee, and Dean Seok-Young Ryu of the KAIST School of Computing.
The building's inception dates back to June 2021, with an ₩11 billion donation from the gaming company KRAFTON and its current and former members, dedicated to nurturing future software talent at KAIST. Four alumni, including KRAFTON Chairman Byung-Gyu Chang, who graduated from the KAIST School of Computing, were the first to pledge donations. This initial act inspired more participants, leading to ₩5.5 billion in individual donations from a total of 11 people. KRAFTON Inc. then matched this amount, bringing the total donation to ₩11 billion.
Since 2021, KRAFTON Inc. has operated a "Matching Grant" program, a donation culture initiative driven by its members. This system allows the company to match funds voluntarily raised by its employees, aiming to encourage active social participation and the creation of social value among its members.
Following this, another 11 KAIST alumni from Devsisters Inc., famous for the Cookie Run series, joined the donation effort. This wave of generosity expanded to include a total of 204 participants, comprising graduates, alumni professors, and current students, acting as a catalyst for the spread of a donation culture within the campus. To date, approximately ₩11.7 billion has been raised for the expansion of the School of Computing building. Furthermore, small donations, including those from alumni and the general public, have continuously grown, reaching over 50,000 instances from 2021 to May 2025.
The funds raised through donations were used to construct a 2,000-pyeong (approximately 6,600 square meters) building for individuals who, like Chairman Byung-Gyu Chang, will unleash their potential and become global leaders. The building was named "KRAFTON SoC (KRAFTON SoC)," and KRAFTON Inc. has further pledged additional donations for the building's maintenance over the next 10 years.
The newly completed KRAFTON Building is a six-story structure. From the second floor up, it features research labs for 20 professors and graduate students to freely pursue their research, along with large lecture halls. The first floor is designed as a meeting place for current students, alumni, and seniors, serving as a space to remember those who came before them.
The four lecture halls on the first floor are designated as "Immersion Camp Classrooms." During the summer and winter sessions, these rooms will be used for intensive month-long courses focused on improving coding and collaboration skills. During regular semesters, they will be utilized for other lectures.
Additionally, to support the physical and mental well-being of those weary from study and research, the building includes a small café on the first floor, a fitness center on the second floor, a Pilates studio on the fifth floor, and a soundproof band practice room in the basement.
Dean Seok-Young Ryu of the School of Computing explained, "The motivation for this wave of donations began with gratitude for the excellent professors and wonderful students, the free and open communication, the comfortable acceptance of diversity among various members, and the time when we could fearlessly dream. We cannot fully repay those who provided us with such precious time and space, but instead, this will be a 'Pay It Forward' space, a space of connection, where we share this gratitude with our juniors."
Alumnus Byung-Gyu Chang shared, "KAIST is more than just an academic foundation for me; it's a meaningful place that helped me set the direction for my life. I am very happy that this space, born from the desire of KRAFTON's members and myself to give back the opportunities and learning we received to the next generation, is completed today. I hope this space becomes a small but warm echo for KAIST members who freely communicate, challenge themselves, and grow."
< Congratulatory speech by alumnus Byung-Gyu Chang >
President Kwang-Hyung Lee stated, "The KRAFTON SoC, the expanded building for the School of Computing, is not just a space; it is the culmination of the KAIST community spirit created by alumni, current students, and faculty. I sincerely thank everyone who participated in this meaningful donation, which demonstrates the power of sharing and connection."
< Commemorative speech by President Kwang-Hyung Lee >
On a related note, the KAIST Development Foundation is actively promoting the "TeamKAIST" campaign for the general public and KAIST alumni to meet more "Daddy Long-Legs" (benefactors) for KAIST.
Website: https://giving.kaist.ac.kr/ko/sub01/sub0103_1.php
2025.05.21 View 2005 -
 <Big Coins> Exhibition: Where Coins and Imagination Collide - Held at SUPEX Hall, KAIST Seoul Campus
KAIST (President Kwang-Hyung Lee) announced on May 19th the opening of the solo exhibition, “Big Coins,” by photographer and media artist Hojun Ji (Adjunct Professor, Department of Industrial Design) at the SUPEX Hall in the Business School of the Seoul Campus. The exhibition will run from May 19th to the end of February of the following year.
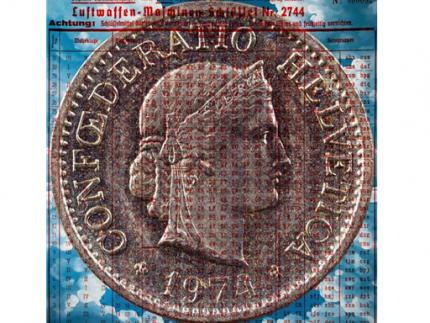
This exhibition at the KAIST Seoul Campus Business School presents artworks with an insightful perspective, inviting diverse interpretations from the audience. Notable pieces include ‘Priced,’ which juxtaposes Leonardo da Vinci's ‘Salvator Mundi,’ sold for approximately 450 million US dollars at a 2017 auction, with a Vatican coin bearing the image of Pope John XXIII. Another work, ‘Ciphered,’ superimposes a code used by the German army during World War II onto a Swiss coin featuring Helvetia.
< Priced, 150x150cm, 2025 >
Currently, Hojun Ji, an Adjunct Professor in KAIST’s Department of Industrial Design (and a student at the KAIST Graduate School of Culture Technology), creates his art using images captured by observing everyday objects through optical or electron microscopes.
He has garnered particular attention for his unique artistic world, which combines enlarged microscopic photographs of coins from across the globe with significant news articles from modern and contemporary history.
Yeo-sun Yoon, Dean of the College of Business Administration, commented, “While the KAIST Art Museum is located at the main campus in Daejeon, the College of Business Administration here on the Seoul Campus also regularly hosts exhibitions curated by the museum. I am delighted to encounter a new realm of art through this solo exhibition by Artist Hojun Ji.”
< Ciphered, 150x150cm, 2025 >
Hyeon-Jeong Suk, Director of the Art Museum and a Full Professor in KAIST’s Department of Industrial Design, remarked, “Professor Hojun Ji's experimental imagination is remarkably unique and eccentric. As a graduate student, he connected data from his observations of his lab dog’s droppings with Jeong Seon's <Geumgang Jeondo>. Such imaginative thinking exemplifies the direction KAIST is pursuing.”
Artist Hojun Ji stated, “The coins I examined through optical and electron microscopes were not merely a form of payment but rather portraits of humanity etched with time and power. The history and memories embedded in their fine cracks and textures resonated with me as a singular sculpture. I aim to unlock the vast world of imagination concealed within these small pieces of metal.”
< Geumgang Byeondo: a Variation of the View of Mt. Geumgang (a twist of Geumgang Jeondo - a Complete View of Geumgangsan Mountain, 1734), 80x120cm, 2009 >
Ji has presented experimental works that transcend the boundaries of science and art through numerous exhibitions both domestically and internationally. His work has also been featured on the cover of the international academic journal Digital Creativity and is increasingly recognized for its artistic merit, with pieces housed in the Embassy of the Republic of Korea in Turkey, the Seoul Museum of Art, and the 9/11 Memorial Center in the United States.
This solo exhibition, which will continue until the end of February of next year, is open to KAIST members and external visitors free of charge.
2025.05.20 View 1952
<Big Coins> Exhibition: Where Coins and Imagination Collide - Held at SUPEX Hall, KAIST Seoul Campus
KAIST (President Kwang-Hyung Lee) announced on May 19th the opening of the solo exhibition, “Big Coins,” by photographer and media artist Hojun Ji (Adjunct Professor, Department of Industrial Design) at the SUPEX Hall in the Business School of the Seoul Campus. The exhibition will run from May 19th to the end of February of the following year.
This exhibition at the KAIST Seoul Campus Business School presents artworks with an insightful perspective, inviting diverse interpretations from the audience. Notable pieces include ‘Priced,’ which juxtaposes Leonardo da Vinci's ‘Salvator Mundi,’ sold for approximately 450 million US dollars at a 2017 auction, with a Vatican coin bearing the image of Pope John XXIII. Another work, ‘Ciphered,’ superimposes a code used by the German army during World War II onto a Swiss coin featuring Helvetia.
< Priced, 150x150cm, 2025 >
Currently, Hojun Ji, an Adjunct Professor in KAIST’s Department of Industrial Design (and a student at the KAIST Graduate School of Culture Technology), creates his art using images captured by observing everyday objects through optical or electron microscopes.
He has garnered particular attention for his unique artistic world, which combines enlarged microscopic photographs of coins from across the globe with significant news articles from modern and contemporary history.
Yeo-sun Yoon, Dean of the College of Business Administration, commented, “While the KAIST Art Museum is located at the main campus in Daejeon, the College of Business Administration here on the Seoul Campus also regularly hosts exhibitions curated by the museum. I am delighted to encounter a new realm of art through this solo exhibition by Artist Hojun Ji.”
< Ciphered, 150x150cm, 2025 >
Hyeon-Jeong Suk, Director of the Art Museum and a Full Professor in KAIST’s Department of Industrial Design, remarked, “Professor Hojun Ji's experimental imagination is remarkably unique and eccentric. As a graduate student, he connected data from his observations of his lab dog’s droppings with Jeong Seon's <Geumgang Jeondo>. Such imaginative thinking exemplifies the direction KAIST is pursuing.”
Artist Hojun Ji stated, “The coins I examined through optical and electron microscopes were not merely a form of payment but rather portraits of humanity etched with time and power. The history and memories embedded in their fine cracks and textures resonated with me as a singular sculpture. I aim to unlock the vast world of imagination concealed within these small pieces of metal.”
< Geumgang Byeondo: a Variation of the View of Mt. Geumgang (a twist of Geumgang Jeondo - a Complete View of Geumgangsan Mountain, 1734), 80x120cm, 2009 >
Ji has presented experimental works that transcend the boundaries of science and art through numerous exhibitions both domestically and internationally. His work has also been featured on the cover of the international academic journal Digital Creativity and is increasingly recognized for its artistic merit, with pieces housed in the Embassy of the Republic of Korea in Turkey, the Seoul Museum of Art, and the 9/11 Memorial Center in the United States.
This solo exhibition, which will continue until the end of February of next year, is open to KAIST members and external visitors free of charge.
2025.05.20 View 1952 -
 “For the First Time, We Shared a Meaningful Exchange”: KAIST Develops an AI App for Parents and Minimally Verbal Autistic Children Connect
• KAIST team up with NAVER AI Lab and Dodakim Child Development Center Develop ‘AAcessTalk’, an AI-driven Communication Tool bridging the gap Between Children with Autism and their Parents
• The project earned the prestigious Best Paper Award at the ACM CHI 2025, the Premier International Conference in Human-Computer Interaction
• Families share heartwarming stories of breakthrough communication and newfound understanding.
< Photo 1. (From left) Professor Hwajung Hong and Doctoral candidate Dasom Choi of the Department of Industrial Design with SoHyun Park and Young-Ho Kim of Naver Cloud AI Lab >
For many families of minimally verbal autistic (MVA) children, communication often feels like an uphill battle. But now, thanks to a new AI-powered app developed by researchers at KAIST in collaboration with NAVER AI Lab and Dodakim Child Development Center, parents are finally experiencing moments of genuine connection with their children.
On the 16th, the KAIST (President Kwang Hyung Lee) research team, led by Professor Hwajung Hong of the Department of Industrial Design, announced the development of ‘AAcessTalk,’ an artificial intelligence (AI)-based communication tool that enables genuine communication between children with autism and their parents.
This research was recognized for its human-centered AI approach and received international attention, earning the Best Paper Award at the ACM CHI 2025*, an international conference held in Yokohama, Japan.*ACM CHI (ACM Conference on Human Factors in Computing Systems) 2025: One of the world's most prestigious academic conference in the field of Human-Computer Interaction (HCI).
This year, approximately 1,200 papers were selected out of about 5,000 submissions, with the Best Paper Award given to only the top 1%. The conference, which drew over 5,000 researchers, was the largest in its history, reflecting the growing interest in ‘Human-AI Interaction.’
Called AACessTalk, the app offers personalized vocabulary cards tailored to each child’s interests and context, while guiding parents through conversations with customized prompts. This creates a space where children’s voices can finally be heard—and where parents and children can connect on a deeper level.
Traditional augmentative and alternative communication (AAC) tools have relied heavily on fixed card systems that often fail to capture the subtle emotions and shifting interests of children with autism. AACessTalk breaks new ground by integrating AI technology that adapts in real time to the child’s mood and environment.
< Figure. Schematics of AACessTalk system. It provides personalized vocabulary cards for children with autism and context-based conversation guides for parents to focus on practical communication. Large ‘Turn Pass Button’ is placed at the child’s side to allow the child to lead the conversation. >
Among its standout features is a large ‘Turn Pass Button’ that gives children control over when to start or end conversations—allowing them to lead with agency. Another feature, the “What about Mom/Dad?” button, encourages children to ask about their parents’ thoughts, fostering mutual engagement in dialogue, something many children had never done before.
One parent shared, “For the first time, we shared a meaningful exchange.” Such stories were common among the 11 families who participated in a two-week pilot study, where children used the app to take more initiative in conversations and parents discovered new layers of their children’s language abilities.
Parents also reported moments of surprise and joy when their children used unexpected words or took the lead in conversations, breaking free from repetitive patterns. “I was amazed when my child used a word I hadn’t heard before. It helped me understand them in a whole new way,” recalled one caregiver.
Professor Hwajung Hong, who led the research at KAIST’s Department of Industrial Design, emphasized the importance of empowering children to express their own voices. “This study shows that AI can be more than a communication aid—it can be a bridge to genuine connection and understanding within families,” she said.
Looking ahead, the team plans to refine and expand human-centered AI technologies that honor neurodiversity, with a focus on bringing practical solutions to socially vulnerable groups and enriching user experiences.
This research is the result of KAIST Department of Industrial Design doctoral student Dasom Choi's internship at NAVER AI Lab.* Thesis Title: AACessTalk: Fostering Communication between Minimally Verbal Autistic Children and Parents with Contextual Guidance and Card Recommendation* DOI: 10.1145/3706598.3713792* Main Author Information: Dasom Choi (KAIST, NAVER AI Lab, First Author), SoHyun Park (NAVER AI Lab) , Kyungah Lee (Dodakim Child Development Center), Hwajung Hong (KAIST), and Young-Ho Kim (NAVER AI Lab, Corresponding Author)
This research was supported by the NAVER AI Lab internship program and grants from the National Research Foundation of Korea: the Doctoral Student Research Encouragement Grant (NRF-2024S1A5B5A19043580) and the Mid-Career Researcher Support Program for the Development of a Generative AI-Based Augmentative and Alternative Communication System for Autism Spectrum Disorder (RS-2024-00458557).
2025.05.19 View 3652
“For the First Time, We Shared a Meaningful Exchange”: KAIST Develops an AI App for Parents and Minimally Verbal Autistic Children Connect
• KAIST team up with NAVER AI Lab and Dodakim Child Development Center Develop ‘AAcessTalk’, an AI-driven Communication Tool bridging the gap Between Children with Autism and their Parents
• The project earned the prestigious Best Paper Award at the ACM CHI 2025, the Premier International Conference in Human-Computer Interaction
• Families share heartwarming stories of breakthrough communication and newfound understanding.
< Photo 1. (From left) Professor Hwajung Hong and Doctoral candidate Dasom Choi of the Department of Industrial Design with SoHyun Park and Young-Ho Kim of Naver Cloud AI Lab >
For many families of minimally verbal autistic (MVA) children, communication often feels like an uphill battle. But now, thanks to a new AI-powered app developed by researchers at KAIST in collaboration with NAVER AI Lab and Dodakim Child Development Center, parents are finally experiencing moments of genuine connection with their children.
On the 16th, the KAIST (President Kwang Hyung Lee) research team, led by Professor Hwajung Hong of the Department of Industrial Design, announced the development of ‘AAcessTalk,’ an artificial intelligence (AI)-based communication tool that enables genuine communication between children with autism and their parents.
This research was recognized for its human-centered AI approach and received international attention, earning the Best Paper Award at the ACM CHI 2025*, an international conference held in Yokohama, Japan.*ACM CHI (ACM Conference on Human Factors in Computing Systems) 2025: One of the world's most prestigious academic conference in the field of Human-Computer Interaction (HCI).
This year, approximately 1,200 papers were selected out of about 5,000 submissions, with the Best Paper Award given to only the top 1%. The conference, which drew over 5,000 researchers, was the largest in its history, reflecting the growing interest in ‘Human-AI Interaction.’
Called AACessTalk, the app offers personalized vocabulary cards tailored to each child’s interests and context, while guiding parents through conversations with customized prompts. This creates a space where children’s voices can finally be heard—and where parents and children can connect on a deeper level.
Traditional augmentative and alternative communication (AAC) tools have relied heavily on fixed card systems that often fail to capture the subtle emotions and shifting interests of children with autism. AACessTalk breaks new ground by integrating AI technology that adapts in real time to the child’s mood and environment.
< Figure. Schematics of AACessTalk system. It provides personalized vocabulary cards for children with autism and context-based conversation guides for parents to focus on practical communication. Large ‘Turn Pass Button’ is placed at the child’s side to allow the child to lead the conversation. >
Among its standout features is a large ‘Turn Pass Button’ that gives children control over when to start or end conversations—allowing them to lead with agency. Another feature, the “What about Mom/Dad?” button, encourages children to ask about their parents’ thoughts, fostering mutual engagement in dialogue, something many children had never done before.
One parent shared, “For the first time, we shared a meaningful exchange.” Such stories were common among the 11 families who participated in a two-week pilot study, where children used the app to take more initiative in conversations and parents discovered new layers of their children’s language abilities.
Parents also reported moments of surprise and joy when their children used unexpected words or took the lead in conversations, breaking free from repetitive patterns. “I was amazed when my child used a word I hadn’t heard before. It helped me understand them in a whole new way,” recalled one caregiver.
Professor Hwajung Hong, who led the research at KAIST’s Department of Industrial Design, emphasized the importance of empowering children to express their own voices. “This study shows that AI can be more than a communication aid—it can be a bridge to genuine connection and understanding within families,” she said.
Looking ahead, the team plans to refine and expand human-centered AI technologies that honor neurodiversity, with a focus on bringing practical solutions to socially vulnerable groups and enriching user experiences.
This research is the result of KAIST Department of Industrial Design doctoral student Dasom Choi's internship at NAVER AI Lab.* Thesis Title: AACessTalk: Fostering Communication between Minimally Verbal Autistic Children and Parents with Contextual Guidance and Card Recommendation* DOI: 10.1145/3706598.3713792* Main Author Information: Dasom Choi (KAIST, NAVER AI Lab, First Author), SoHyun Park (NAVER AI Lab) , Kyungah Lee (Dodakim Child Development Center), Hwajung Hong (KAIST), and Young-Ho Kim (NAVER AI Lab, Corresponding Author)
This research was supported by the NAVER AI Lab internship program and grants from the National Research Foundation of Korea: the Doctoral Student Research Encouragement Grant (NRF-2024S1A5B5A19043580) and the Mid-Career Researcher Support Program for the Development of a Generative AI-Based Augmentative and Alternative Communication System for Autism Spectrum Disorder (RS-2024-00458557).
2025.05.19 View 3652 -
 KAIST Discovers Protein Switch that Turns Anti-Viral Immune Response On and Off
Even after the COVID-19 pandemic, various new infectious diseases continue to emerge, posing ongoing viral threats that demand robust and sustained immune defenses. However, excessive immune reactions can also harm body tissues, causing significant health issues. KAIST and an international research team have discovered a critical protein that acts as a 'switch' regulating immune responses to viruses. This breakthrough is expected to lay the groundwork for future infectious disease responses and autoimmune disease treatment strategies.
KAIST (President Kwang-Hyung Lee) announced on May 14 that a joint research team led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering at KAIST and Professor Seunghee Cha from University of Florida has discovered the mechanism by which double-stranded RNA derived from mitochondria amplifies immune responses. They identified the protein SLIRP as an 'immune switch' that regulates this process, playing a crucial role in both viral infections and autoimmune diseases.
< (From left) Master's candidate Yewon Yang, Professor Yoosik Kim and Ph.D. candidate Doyeong Ku of the Department of Chemical and Biomolecular Engineering >
Autoimmune diseases arise when the immune system fails to differentiate between external pathogens and the body's own molecules, leading to self-directed attacks. Despite extensive research, the precise causes of excessive inflammatory conditions like Sjögren’s syndrome and systemic lupus erythematosus remain unclear, and effective treatments are still limited.
To uncover the molecular mechanisms driving immune hyperactivation and to identify potential regulatory factors, the research team led by Professor Yoosik Kim focused on mitochondrial double-stranded RNA (mt-dsRNA), a genetic immunogenic material produced within cellular organelles. Since mt-dsRNA structurally resembles viral RNA, it can mistakenly trigger immune responses even in the absence of an actual viral infection.
The team discovered that SLIRP, a key regulator of mt-dsRNA, amplifies immune responses by stabilizing the RNA. They confirmed that SLIRP expression increases in experimental models simulating the tissues of autoimmune disease patients and viral infections. Conversely, suppressing SLIRP significantly reduced the immune response, underscoring its role as a critical factor in immune amplification.
This study also demonstrated the dual function of SLIRP in different contexts. In cells infected with human beta coronavirus OC43 and encephalomyocarditis virus (EMCV), SLIRP suppression led to reduced antiviral responses and increased viral replication. Meanwhile, in the blood and salivary gland cells of Sjögren’s syndrome patients, where both SLIRP and mt-dsRNA levels were elevated, suppressing SLIRP alleviated the abnormal immune response.
These findings highlight SLIRP as a key molecular switch that regulates immune responses in both infections and autoimmune diseases.
< Figure 1. Schematic diagram of antiviral signal amplification by SLIRP: SLIRP-based mt-dsRNA induction, cytoplasmic accumulation, and strong interferon response induction by positive feedback of immune response activation. Confirmation of the immune regulatory function of SLIRP in defense against autoimmune diseases Sjögren's syndrome, coronavirus, and encephalomyocarditis virus infection. >
Professor Yoosik Kim remarked, "Through this study, we have identified SLIRP as a crucial protein that drives immune amplification via mt-dsRNAs. Given its dual role in autoimmune diseases and viral infections, SLIRP presents a promising target for immune regulation therapies across various inflammatory disease contexts."
The study, with Ph.D. student Do-Young Ku (first author) and M.S. student Ye-Won Yang (second author) from the Department of Chemical and Biomolecular Engineering at KAIST as primary contributors, was published online in the journal Cell Reports on April 19, 2025.
※ Paper title: SLIRP amplifies antiviral signaling via positive feedback regulation and contributes to autoimmune diseases※ Main authors: Do-Young Ku (KAIST, first author), Ye-Won Yang (KAIST, second author), Seunghee Cha (University of Florida, corresponding author), Yoosik Kim (KAIST, corresponding author)
This study was supported by the Ministry of Health and Welfare's Public Health Technology Research Program and the National Institutes of Health (NIH) through Research Project (R01) funding.
2025.05.14 View 2520
KAIST Discovers Protein Switch that Turns Anti-Viral Immune Response On and Off
Even after the COVID-19 pandemic, various new infectious diseases continue to emerge, posing ongoing viral threats that demand robust and sustained immune defenses. However, excessive immune reactions can also harm body tissues, causing significant health issues. KAIST and an international research team have discovered a critical protein that acts as a 'switch' regulating immune responses to viruses. This breakthrough is expected to lay the groundwork for future infectious disease responses and autoimmune disease treatment strategies.
KAIST (President Kwang-Hyung Lee) announced on May 14 that a joint research team led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering at KAIST and Professor Seunghee Cha from University of Florida has discovered the mechanism by which double-stranded RNA derived from mitochondria amplifies immune responses. They identified the protein SLIRP as an 'immune switch' that regulates this process, playing a crucial role in both viral infections and autoimmune diseases.
< (From left) Master's candidate Yewon Yang, Professor Yoosik Kim and Ph.D. candidate Doyeong Ku of the Department of Chemical and Biomolecular Engineering >
Autoimmune diseases arise when the immune system fails to differentiate between external pathogens and the body's own molecules, leading to self-directed attacks. Despite extensive research, the precise causes of excessive inflammatory conditions like Sjögren’s syndrome and systemic lupus erythematosus remain unclear, and effective treatments are still limited.
To uncover the molecular mechanisms driving immune hyperactivation and to identify potential regulatory factors, the research team led by Professor Yoosik Kim focused on mitochondrial double-stranded RNA (mt-dsRNA), a genetic immunogenic material produced within cellular organelles. Since mt-dsRNA structurally resembles viral RNA, it can mistakenly trigger immune responses even in the absence of an actual viral infection.
The team discovered that SLIRP, a key regulator of mt-dsRNA, amplifies immune responses by stabilizing the RNA. They confirmed that SLIRP expression increases in experimental models simulating the tissues of autoimmune disease patients and viral infections. Conversely, suppressing SLIRP significantly reduced the immune response, underscoring its role as a critical factor in immune amplification.
This study also demonstrated the dual function of SLIRP in different contexts. In cells infected with human beta coronavirus OC43 and encephalomyocarditis virus (EMCV), SLIRP suppression led to reduced antiviral responses and increased viral replication. Meanwhile, in the blood and salivary gland cells of Sjögren’s syndrome patients, where both SLIRP and mt-dsRNA levels were elevated, suppressing SLIRP alleviated the abnormal immune response.
These findings highlight SLIRP as a key molecular switch that regulates immune responses in both infections and autoimmune diseases.
< Figure 1. Schematic diagram of antiviral signal amplification by SLIRP: SLIRP-based mt-dsRNA induction, cytoplasmic accumulation, and strong interferon response induction by positive feedback of immune response activation. Confirmation of the immune regulatory function of SLIRP in defense against autoimmune diseases Sjögren's syndrome, coronavirus, and encephalomyocarditis virus infection. >
Professor Yoosik Kim remarked, "Through this study, we have identified SLIRP as a crucial protein that drives immune amplification via mt-dsRNAs. Given its dual role in autoimmune diseases and viral infections, SLIRP presents a promising target for immune regulation therapies across various inflammatory disease contexts."
The study, with Ph.D. student Do-Young Ku (first author) and M.S. student Ye-Won Yang (second author) from the Department of Chemical and Biomolecular Engineering at KAIST as primary contributors, was published online in the journal Cell Reports on April 19, 2025.
※ Paper title: SLIRP amplifies antiviral signaling via positive feedback regulation and contributes to autoimmune diseases※ Main authors: Do-Young Ku (KAIST, first author), Ye-Won Yang (KAIST, second author), Seunghee Cha (University of Florida, corresponding author), Yoosik Kim (KAIST, corresponding author)
This study was supported by the Ministry of Health and Welfare's Public Health Technology Research Program and the National Institutes of Health (NIH) through Research Project (R01) funding.
2025.05.14 View 2520 -
 KAIST's Pioneering VR Precision Technology & Choreography Tool Receive Spotlights at CHI 2025
Accurate pointing in virtual spaces is essential for seamless interaction. If pointing is not precise, selecting the desired object becomes challenging, breaking user immersion and reducing overall experience quality. KAIST researchers have developed a technology that offers a vivid, lifelike experience in virtual space, alongside a new tool that assists choreographers throughout the creative process.
KAIST (President Kwang-Hyung Lee) announced on May 13th that a research team led by Professor Sang Ho Yoon of the Graduate School of Culture Technology, in collaboration with Professor Yang Zhang of the University of California, Los Angeles (UCLA), has developed the ‘T2IRay’ technology and the ‘ChoreoCraft’ platform, which enables choreographers to work more freely and creatively in virtual reality. These technologies received two Honorable Mention awards, recognizing the top 5% of papers, at CHI 2025*, the best international conference in the field of human-computer interaction, hosted by the Association for Computing Machinery (ACM) from April 25 to May 1.
< (From left) PhD candidates Jina Kim and Kyungeun Jung along with Master's candidate, Hyunyoung Han and Professor Sang Ho Yoon of KAIST Graduate School of Culture Technology and Professor Yang Zhang (top) of UCLA >
T2IRay: Enabling Virtual Input with Precision
T2IRay introduces a novel input method that allows for precise object pointing in virtual environments by expanding traditional thumb-to-index gestures. This approach overcomes previous limitations, such as interruptions or reduced accuracy due to changes in hand position or orientation.
The technology uses a local coordinate system based on finger relationships, ensuring continuous input even as hand positions shift. It accurately captures subtle thumb movements within this coordinate system, integrating natural head movements to allow fluid, intuitive control across a wide range.
< Figure 1. T2IRay framework utilizing the delicate movements of the thumb and index fingers for AR/VR pointing >
Professor Sang Ho Yoon explained, “T2IRay can significantly enhance the user experience in AR/VR by enabling smooth, stable control even when the user’s hands are in motion.”
This study, led by first author Jina Kim, was supported by the Excellent New Researcher Support Project of the National Research Foundation of Korea under the Ministry of Science and ICT, as well as the University ICT Research Center (ITRC) Support Project of the Institute of Information and Communications Technology Planning and Evaluation (IITP).
▴ Paper title: T2IRay: Design of Thumb-to-Index Based Indirect Pointing for Continuous and Robust AR/VR Input▴ Paper link: https://doi.org/10.1145/3706598.3713442
▴ T2IRay demo video: https://youtu.be/ElJlcJbkJPY
ChoreoCraft: Creativity Support through VR for Choreographers
In addition, Professor Yoon’s team developed ‘ChoreoCraft,’ a virtual reality tool designed to support choreographers by addressing the unique challenges they face, such as memorizing complex movements, overcoming creative blocks, and managing subjective feedback.
ChoreoCraft reduces reliance on memory by allowing choreographers to save and refine movements directly within a VR space, using a motion-capture avatar for real-time interaction. It also enhances creativity by suggesting movements that naturally fit with prior choreography and musical elements. Furthermore, the system provides quantitative feedback by analyzing kinematic factors like motion stability and engagement, helping choreographers make data-driven creative decisions.
< Figure 2. ChoreoCraft's approaches to encourage creative process >
Professor Yoon noted, “ChoreoCraft is a tool designed to address the core challenges faced by choreographers, enhancing both creativity and efficiency. In user tests with professional choreographers, it received high marks for its ability to spark creative ideas and provide valuable quantitative feedback.”
This research was conducted in collaboration with doctoral candidate Kyungeun Jung and master’s candidate Hyunyoung Han, alongside the Electronics and Telecommunications Research Institute (ETRI) and One Million Co., Ltd. (CEO Hye-rang Kim), with support from the Cultural and Arts Immersive Service Development Project by the Ministry of Culture, Sports and Tourism.
▴ Paper title: ChoreoCraft: In-situ Crafting of Choreography in Virtual Reality through Creativity Support Tools▴ Paper link: https://doi.org/10.1145/3706598.3714220
▴ ChoreoCraft demo video: https://youtu.be/Ms1fwiSBjjw
*CHI (Conference on Human Factors in Computing Systems): The premier international conference on human-computer interaction, organized by the ACM, was held this year from April 25 to May 1, 2025.
2025.05.13 View 3361
KAIST's Pioneering VR Precision Technology & Choreography Tool Receive Spotlights at CHI 2025
Accurate pointing in virtual spaces is essential for seamless interaction. If pointing is not precise, selecting the desired object becomes challenging, breaking user immersion and reducing overall experience quality. KAIST researchers have developed a technology that offers a vivid, lifelike experience in virtual space, alongside a new tool that assists choreographers throughout the creative process.
KAIST (President Kwang-Hyung Lee) announced on May 13th that a research team led by Professor Sang Ho Yoon of the Graduate School of Culture Technology, in collaboration with Professor Yang Zhang of the University of California, Los Angeles (UCLA), has developed the ‘T2IRay’ technology and the ‘ChoreoCraft’ platform, which enables choreographers to work more freely and creatively in virtual reality. These technologies received two Honorable Mention awards, recognizing the top 5% of papers, at CHI 2025*, the best international conference in the field of human-computer interaction, hosted by the Association for Computing Machinery (ACM) from April 25 to May 1.
< (From left) PhD candidates Jina Kim and Kyungeun Jung along with Master's candidate, Hyunyoung Han and Professor Sang Ho Yoon of KAIST Graduate School of Culture Technology and Professor Yang Zhang (top) of UCLA >
T2IRay: Enabling Virtual Input with Precision
T2IRay introduces a novel input method that allows for precise object pointing in virtual environments by expanding traditional thumb-to-index gestures. This approach overcomes previous limitations, such as interruptions or reduced accuracy due to changes in hand position or orientation.
The technology uses a local coordinate system based on finger relationships, ensuring continuous input even as hand positions shift. It accurately captures subtle thumb movements within this coordinate system, integrating natural head movements to allow fluid, intuitive control across a wide range.
< Figure 1. T2IRay framework utilizing the delicate movements of the thumb and index fingers for AR/VR pointing >
Professor Sang Ho Yoon explained, “T2IRay can significantly enhance the user experience in AR/VR by enabling smooth, stable control even when the user’s hands are in motion.”
This study, led by first author Jina Kim, was supported by the Excellent New Researcher Support Project of the National Research Foundation of Korea under the Ministry of Science and ICT, as well as the University ICT Research Center (ITRC) Support Project of the Institute of Information and Communications Technology Planning and Evaluation (IITP).
▴ Paper title: T2IRay: Design of Thumb-to-Index Based Indirect Pointing for Continuous and Robust AR/VR Input▴ Paper link: https://doi.org/10.1145/3706598.3713442
▴ T2IRay demo video: https://youtu.be/ElJlcJbkJPY
ChoreoCraft: Creativity Support through VR for Choreographers
In addition, Professor Yoon’s team developed ‘ChoreoCraft,’ a virtual reality tool designed to support choreographers by addressing the unique challenges they face, such as memorizing complex movements, overcoming creative blocks, and managing subjective feedback.
ChoreoCraft reduces reliance on memory by allowing choreographers to save and refine movements directly within a VR space, using a motion-capture avatar for real-time interaction. It also enhances creativity by suggesting movements that naturally fit with prior choreography and musical elements. Furthermore, the system provides quantitative feedback by analyzing kinematic factors like motion stability and engagement, helping choreographers make data-driven creative decisions.
< Figure 2. ChoreoCraft's approaches to encourage creative process >
Professor Yoon noted, “ChoreoCraft is a tool designed to address the core challenges faced by choreographers, enhancing both creativity and efficiency. In user tests with professional choreographers, it received high marks for its ability to spark creative ideas and provide valuable quantitative feedback.”
This research was conducted in collaboration with doctoral candidate Kyungeun Jung and master’s candidate Hyunyoung Han, alongside the Electronics and Telecommunications Research Institute (ETRI) and One Million Co., Ltd. (CEO Hye-rang Kim), with support from the Cultural and Arts Immersive Service Development Project by the Ministry of Culture, Sports and Tourism.
▴ Paper title: ChoreoCraft: In-situ Crafting of Choreography in Virtual Reality through Creativity Support Tools▴ Paper link: https://doi.org/10.1145/3706598.3714220
▴ ChoreoCraft demo video: https://youtu.be/Ms1fwiSBjjw
*CHI (Conference on Human Factors in Computing Systems): The premier international conference on human-computer interaction, organized by the ACM, was held this year from April 25 to May 1, 2025.
2025.05.13 View 3361