-
 KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 14022
KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 14022 -
 KAIST Develops a Fire-risk Free Self-Powered Hydrogen Production System
KAIST researchers have developed a new hydrogen production system that overcomes the current limitations of green hydrogen production. By using a water-splitting system with an aqueous electrolyte, this system is expected to block fire risks and enable stable hydrogen production.
KAIST (represented by President Kwang Hyung Lee) announced on the 22nd of October that a research team led by Professor Jeung Ku Kang from the Department of Materials Science and Engineering developed a self-powered hydrogen production system based on a high-performance zinc-air battery*.
*Zinc-air battery: A primary battery that absorbs oxygen from the air and uses it as an oxidant. Its advantage is long life, but its low electromotive force is a disadvantage.
Hydrogen (H₂) is a key raw material for synthesizing high-value-added substances, and it is gaining attention as a clean fuel with an energy density (142 MJ/kg) more than three times higher than traditional fossil fuels (gasoline, diesel, etc.). However, most current hydrogen production methods impose environmental burden as they emit carbon dioxide (CO₂).
While green hydrogen can be produced by splitting water using renewable energy sources such as solar cells and wind power, these sources are subject to irregular power generation due to weather and temperature fluctuations, leading to low water-splitting efficiency.
To overcome this, air batteries that can emit sufficient voltage (greater than 1.23V) for water splitting have been gaining attention. However, achieving sufficient capacity requires expensive precious metal catalysts and the performance of the catalyst materials becomes significantly degraded during prolonged charge and discharge cycles. Thus, it is essential to develop catalysts that are effective for the water-splitting reactions (oxygen and hydrogen evolution) and materials that can stabilize the repeated charge and discharge reactions (oxygen reduction and evolution) in zinc-air battery electrodes.
In response, Professor Kang's research team proposed a method to synthesize a non-precious metal catalyst material (G-SHELL) that is effective for three different catalytic reactions (oxygen evolution, hydrogen evolution, and oxygen reduction) by growing nano-sized, metal-organic frameworks on graphene oxide.
The team incorporated the developed catalyst material into the air cathode of a zinc-air battery, confirming that it achieved approximately five times higher energy density (797Wh/kg), high power characteristics (275.8mW/cm²), and long-term stability even under repeated charge and discharge conditions compared to conventional batteries.
Additionally, the zinc-air battery, which operates using an aqueous electrolyte, is safe from fire risks. It is expected that this system can be applied as a next-generation energy storage device when linked with water electrolysis systems, offering an environmentally friendly method for hydrogen production.
< Figure 1. Illustrations of a trifunctional graphene-sandwiched heterojunction-embedded layered lattice (G-SHELL) structure. Schematic representation of a) synthesis procedures of G-SHELL from a zeolitic imidazole framework, b) hollow core-layered shell structure with trifunctional sites for oxygen reduction evolution (ORR), oxygen evolution reaction (OER), and hydrogen evolution reaction (HER), and c) heterojunctions, eterojunction-induced internal electric fields, and the corresponding band structure. >
Professor Kang explained, "By developing a catalyst material with high activity and durability for three different electrochemical catalytic reactions at low temperatures using simple methods, the self-powered hydrogen production system we implemented based on zinc-air batteries presents a new breakthrough to overcome the current limitations of green hydrogen production."
<Figure 2. Electrochemical performance of a ZAB-driven water-splitting cell with G-SHELL. Diagram of a self-driven water-splitting cell integrated by combining a ZAB with an alkaline water electrolyzer.>
PhD candidate Dong Won Kim and Jihoon Kim, a master's student in the Department of Materials Science and Engineering at KAIST, were co-first authors of this research, which was published in the international journal Advanced Science on September 17th in the multidisciplinary field of materials science. (Paper Title: “Trifunctional Graphene-Sandwiched Heterojunction-Embedded Layered Lattice Electrocatalyst for High Performance in Zn-Air Battery-Driven Water Splitting”)
This research was supported by the Nano and Material Technology Development Program of the Ministry of Science and ICT and the National Research Foundation of Korea’s Future Technology Research Laboratory.
2024.10.22 View 6862
KAIST Develops a Fire-risk Free Self-Powered Hydrogen Production System
KAIST researchers have developed a new hydrogen production system that overcomes the current limitations of green hydrogen production. By using a water-splitting system with an aqueous electrolyte, this system is expected to block fire risks and enable stable hydrogen production.
KAIST (represented by President Kwang Hyung Lee) announced on the 22nd of October that a research team led by Professor Jeung Ku Kang from the Department of Materials Science and Engineering developed a self-powered hydrogen production system based on a high-performance zinc-air battery*.
*Zinc-air battery: A primary battery that absorbs oxygen from the air and uses it as an oxidant. Its advantage is long life, but its low electromotive force is a disadvantage.
Hydrogen (H₂) is a key raw material for synthesizing high-value-added substances, and it is gaining attention as a clean fuel with an energy density (142 MJ/kg) more than three times higher than traditional fossil fuels (gasoline, diesel, etc.). However, most current hydrogen production methods impose environmental burden as they emit carbon dioxide (CO₂).
While green hydrogen can be produced by splitting water using renewable energy sources such as solar cells and wind power, these sources are subject to irregular power generation due to weather and temperature fluctuations, leading to low water-splitting efficiency.
To overcome this, air batteries that can emit sufficient voltage (greater than 1.23V) for water splitting have been gaining attention. However, achieving sufficient capacity requires expensive precious metal catalysts and the performance of the catalyst materials becomes significantly degraded during prolonged charge and discharge cycles. Thus, it is essential to develop catalysts that are effective for the water-splitting reactions (oxygen and hydrogen evolution) and materials that can stabilize the repeated charge and discharge reactions (oxygen reduction and evolution) in zinc-air battery electrodes.
In response, Professor Kang's research team proposed a method to synthesize a non-precious metal catalyst material (G-SHELL) that is effective for three different catalytic reactions (oxygen evolution, hydrogen evolution, and oxygen reduction) by growing nano-sized, metal-organic frameworks on graphene oxide.
The team incorporated the developed catalyst material into the air cathode of a zinc-air battery, confirming that it achieved approximately five times higher energy density (797Wh/kg), high power characteristics (275.8mW/cm²), and long-term stability even under repeated charge and discharge conditions compared to conventional batteries.
Additionally, the zinc-air battery, which operates using an aqueous electrolyte, is safe from fire risks. It is expected that this system can be applied as a next-generation energy storage device when linked with water electrolysis systems, offering an environmentally friendly method for hydrogen production.
< Figure 1. Illustrations of a trifunctional graphene-sandwiched heterojunction-embedded layered lattice (G-SHELL) structure. Schematic representation of a) synthesis procedures of G-SHELL from a zeolitic imidazole framework, b) hollow core-layered shell structure with trifunctional sites for oxygen reduction evolution (ORR), oxygen evolution reaction (OER), and hydrogen evolution reaction (HER), and c) heterojunctions, eterojunction-induced internal electric fields, and the corresponding band structure. >
Professor Kang explained, "By developing a catalyst material with high activity and durability for three different electrochemical catalytic reactions at low temperatures using simple methods, the self-powered hydrogen production system we implemented based on zinc-air batteries presents a new breakthrough to overcome the current limitations of green hydrogen production."
<Figure 2. Electrochemical performance of a ZAB-driven water-splitting cell with G-SHELL. Diagram of a self-driven water-splitting cell integrated by combining a ZAB with an alkaline water electrolyzer.>
PhD candidate Dong Won Kim and Jihoon Kim, a master's student in the Department of Materials Science and Engineering at KAIST, were co-first authors of this research, which was published in the international journal Advanced Science on September 17th in the multidisciplinary field of materials science. (Paper Title: “Trifunctional Graphene-Sandwiched Heterojunction-Embedded Layered Lattice Electrocatalyst for High Performance in Zn-Air Battery-Driven Water Splitting”)
This research was supported by the Nano and Material Technology Development Program of the Ministry of Science and ICT and the National Research Foundation of Korea’s Future Technology Research Laboratory.
2024.10.22 View 6862 -
 KAIST Develops Thread-like, Flexible Thermoelectric Materials Applicable in Extreme Environments
A team of Korean researchers developed a thermoelectric material that can be used in wearable devices, such as smart clothing, and while maintaining stable thermal energy performance even in extreme environments. It has dramatically resolved the dilemma of striking the balance between achieving good performance and the mechanical flexibility of thermoelectric materials, which has been a long-standing challenge in the field of thermoelectric materials, and has also proven the possibility of commercialization.
KAIST (President Kwang-Hyung Lee) announced on the 21st that a joint research team of Professor Yeon Sik Jung of the Department of Materials Science and Engineering and Professor Inkyu Park of the Department of Mechanical Engineering, in collaboration with the research teams of Professor Min-Wook Oh of Hanbat National University (President Yong Jun Oh) and Dr. Jun-Ho Jeong of the Korea Institute of Machinery and Materials (President Seoghyun Ryu), have successfully developed ‘bismuth telluride (Bi2Te3) thermoelectric fibers,’ an innovative energy harvesting solution for next-generation flexible electronic devices.
Thermoelectric materials are materials that generate voltage when there is a temperature difference and convert thermal energy into electrical energy. Currently, about 70% of energy being lost as wasted heat, so due attention is being given to research on these as sustainable energy materials that can recover and harvesting energy from this waste heat.
Most of the heat sources around us are curved, such as the human body, vehicle exhaust pipes, and cooling fins. Inorganic thermoelectric materials based on ceramic materials boast high thermoelectric performance, but they are fragile and difficult to produce in curved shapes. On the other hand, flexible thermoelectric materials using existing polymer binders can be applied to surfaces of various shapes, but their performance was limited due to the low electrical conductivity and high thermal resistance of the polymer.
Existing flexible thermoelectric materials contain polymer additives, but the inorganic thermoelectric material developed by the research team is not flexible, so they overcame these limitations by twisting nano ribbons instead of additives to produce a thread-shaped thermoelectric material. Inspired by the flexibility of inorganic nano ribbons, the research team used a nanomold-based electron beam deposition technique to continuously deposit nano ribbons and then twisted them into a thread shape to create bismuth telluride (Bi2Te3) inorganic thermoelectric fibers.
These inorganic thermoelectric fibers have higher bending strength than existing thermoelectric materials, and showed almost no change in electrical properties even after repeated bending and tensile tests of more than 1,000 times. The thermoelectric device created by the research team generates electricity using temperature differences, and if clothes are made with fiber-type thermoelectric devices, electricity can be generated from body temperature to operate other electronic devices.
< Figure 1. Schematic diagram and actual image of the all-inorganic flexible thermoelectric yarn made without polymer additives >
In fact, the possibility of commercialization was proven through a demonstration of collecting energy by embedding thermoelectric fibers in life jackets or clothing. In addition, it opened up the possibility of building a high-efficiency energy harvesting system that recycles waste heat by utilizing the temperature difference between the hot fluid inside a pipe and the cold air outside in industrial settings.
Professor Yeon Sik Jung said, "The inorganic flexible thermoelectric material developed in this study can be used in wearable devices such as smart clothing, and it can maintain stable performance even in extreme environments, so it has a high possibility of being commercialized through additional research in the future." Professor Inkyu Park also emphasized, "This technology will become the core of next-generation energy harvesting technology, and it is expected to play an important role in various fields from waste heat utilization in industrial sites to personal wearable self-power generation devices."
This study, in which Hanhwi Jang, a Ph.D. student at KAIST's Department of Materials Science and Engineering, Professor Junseong Ahn of Korea University, Sejong Campus, and Dr. Yongrok Jeong of Korea Atomic Energy Research Institute contributed equally as joint first authors, was published in the online edition of the international academic journal Advanced Materials on September 17, and was selected as the back-cover paper in recognition of its excellence. (Paper title: Flexible All-Inorganic Thermoelectric Yarns)
Meanwhile, this study was conducted through the Mid-career Researcher Support Program and the Future Materials Discovery Program of the National Research Foundation of Korea, and the support from the Global Bio-Integrated Materials Center, the Ministry of Trade, Industry and Energy, and the Korea Institute of Industrial Technology Evaluation and Planning (KEIT) upon the support by the Ministry of Science and ICT.
2024.10.21 View 5552
KAIST Develops Thread-like, Flexible Thermoelectric Materials Applicable in Extreme Environments
A team of Korean researchers developed a thermoelectric material that can be used in wearable devices, such as smart clothing, and while maintaining stable thermal energy performance even in extreme environments. It has dramatically resolved the dilemma of striking the balance between achieving good performance and the mechanical flexibility of thermoelectric materials, which has been a long-standing challenge in the field of thermoelectric materials, and has also proven the possibility of commercialization.
KAIST (President Kwang-Hyung Lee) announced on the 21st that a joint research team of Professor Yeon Sik Jung of the Department of Materials Science and Engineering and Professor Inkyu Park of the Department of Mechanical Engineering, in collaboration with the research teams of Professor Min-Wook Oh of Hanbat National University (President Yong Jun Oh) and Dr. Jun-Ho Jeong of the Korea Institute of Machinery and Materials (President Seoghyun Ryu), have successfully developed ‘bismuth telluride (Bi2Te3) thermoelectric fibers,’ an innovative energy harvesting solution for next-generation flexible electronic devices.
Thermoelectric materials are materials that generate voltage when there is a temperature difference and convert thermal energy into electrical energy. Currently, about 70% of energy being lost as wasted heat, so due attention is being given to research on these as sustainable energy materials that can recover and harvesting energy from this waste heat.
Most of the heat sources around us are curved, such as the human body, vehicle exhaust pipes, and cooling fins. Inorganic thermoelectric materials based on ceramic materials boast high thermoelectric performance, but they are fragile and difficult to produce in curved shapes. On the other hand, flexible thermoelectric materials using existing polymer binders can be applied to surfaces of various shapes, but their performance was limited due to the low electrical conductivity and high thermal resistance of the polymer.
Existing flexible thermoelectric materials contain polymer additives, but the inorganic thermoelectric material developed by the research team is not flexible, so they overcame these limitations by twisting nano ribbons instead of additives to produce a thread-shaped thermoelectric material. Inspired by the flexibility of inorganic nano ribbons, the research team used a nanomold-based electron beam deposition technique to continuously deposit nano ribbons and then twisted them into a thread shape to create bismuth telluride (Bi2Te3) inorganic thermoelectric fibers.
These inorganic thermoelectric fibers have higher bending strength than existing thermoelectric materials, and showed almost no change in electrical properties even after repeated bending and tensile tests of more than 1,000 times. The thermoelectric device created by the research team generates electricity using temperature differences, and if clothes are made with fiber-type thermoelectric devices, electricity can be generated from body temperature to operate other electronic devices.
< Figure 1. Schematic diagram and actual image of the all-inorganic flexible thermoelectric yarn made without polymer additives >
In fact, the possibility of commercialization was proven through a demonstration of collecting energy by embedding thermoelectric fibers in life jackets or clothing. In addition, it opened up the possibility of building a high-efficiency energy harvesting system that recycles waste heat by utilizing the temperature difference between the hot fluid inside a pipe and the cold air outside in industrial settings.
Professor Yeon Sik Jung said, "The inorganic flexible thermoelectric material developed in this study can be used in wearable devices such as smart clothing, and it can maintain stable performance even in extreme environments, so it has a high possibility of being commercialized through additional research in the future." Professor Inkyu Park also emphasized, "This technology will become the core of next-generation energy harvesting technology, and it is expected to play an important role in various fields from waste heat utilization in industrial sites to personal wearable self-power generation devices."
This study, in which Hanhwi Jang, a Ph.D. student at KAIST's Department of Materials Science and Engineering, Professor Junseong Ahn of Korea University, Sejong Campus, and Dr. Yongrok Jeong of Korea Atomic Energy Research Institute contributed equally as joint first authors, was published in the online edition of the international academic journal Advanced Materials on September 17, and was selected as the back-cover paper in recognition of its excellence. (Paper title: Flexible All-Inorganic Thermoelectric Yarns)
Meanwhile, this study was conducted through the Mid-career Researcher Support Program and the Future Materials Discovery Program of the National Research Foundation of Korea, and the support from the Global Bio-Integrated Materials Center, the Ministry of Trade, Industry and Energy, and the Korea Institute of Industrial Technology Evaluation and Planning (KEIT) upon the support by the Ministry of Science and ICT.
2024.10.21 View 5552 -
 KAIST Develops Technology for the Precise Diagnosis of Electric Vehicle Batteries Using Small Currents
Accurately diagnosing the state of electric vehicle (EV) batteries is essential for their efficient management and safe use. KAIST researchers have developed a new technology that can diagnose and monitor the state of batteries with high precision using only small amounts of current, which is expected to maximize the batteries’ long-term stability and efficiency.
KAIST (represented by President Kwang Hyung Lee) announced on the 17th of October that a research team led by Professors Kyeongha Kwon and Sang-Gug Lee from the School of Electrical Engineering had developed electrochemical impedance spectroscopy (EIS) technology that can be used to improve the stability and performance of high-capacity batteries in electric vehicles.
EIS is a powerful tool that measures the impedance* magnitude and changes in a battery, allowing the evaluation of battery efficiency and loss. It is considered an important tool for assessing the state of charge (SOC) and state of health (SOH) of batteries. Additionally, it can be used to identify thermal characteristics, chemical/physical changes, predict battery life, and determine the causes of failures. *Battery Impedance: A measure of the resistance to current flow within the battery that is used to assess battery performance and condition.
However, traditional EIS equipment is expensive and complex, making it difficult to install, operate, and maintain. Moreover, due to sensitivity and precision limitations, applying current disturbances of several amperes (A) to a battery can cause significant electrical stress, increasing the risk of battery failure or fire and making it difficult to use in practice.
< Figure 1. Flow chart for diagnosis and prevention of unexpected combustion via the use of the electrochemical impedance spectroscopy (EIS) for the batteries for electric vehicles. >
To address this, the KAIST research team developed and validated a low-current EIS system for diagnosing the condition and health of high-capacity EV batteries. This EIS system can precisely measure battery impedance with low current disturbances (10mA), minimizing thermal effects and safety issues during the measurement process.
In addition, the system minimizes bulky and costly components, making it easy to integrate into vehicles. The system was proven effective in identifying the electrochemical properties of batteries under various operating conditions, including different temperatures and SOC levels.
Professor Kyeongha Kwon (the corresponding author) explained, “This system can be easily integrated into the battery management system (BMS) of electric vehicles and has demonstrated high measurement accuracy while significantly reducing the cost and complexity compared to traditional high-current EIS methods. It can contribute to battery diagnosis and performance improvements not only for electric vehicles but also for energy storage systems (ESS).”
This research, in which Young-Nam Lee, a doctoral student in the School of Electrical Engineering at KAIST participated as the first author, was published in the prestigious international journal IEEE Transactions on Industrial Electronics (top 2% in the field; IF 7.5) on September 5th. (Paper Title: Small-Perturbation Electrochemical Impedance Spectroscopy System With High Accuracy for High-Capacity Batteries in Electric Vehicles, Link: https://ieeexplore.ieee.org/document/10666864)
< Figure 2. Impedance measurement results of large-capacity batteries for electric vehicles. ZEW (commercial EW; MP10, Wonatech) versus ZMEAS (proposed system) >
This research was supported by the Basic Research Program of the National Research Foundation of Korea, the Next-Generation Intelligent Semiconductor Technology Development Program of the Korea Evaluation Institute of Industrial Technology, and the AI Semiconductor Graduate Program of the Institute of Information & Communications Technology Planning & Evaluation.
2024.10.17 View 7612
KAIST Develops Technology for the Precise Diagnosis of Electric Vehicle Batteries Using Small Currents
Accurately diagnosing the state of electric vehicle (EV) batteries is essential for their efficient management and safe use. KAIST researchers have developed a new technology that can diagnose and monitor the state of batteries with high precision using only small amounts of current, which is expected to maximize the batteries’ long-term stability and efficiency.
KAIST (represented by President Kwang Hyung Lee) announced on the 17th of October that a research team led by Professors Kyeongha Kwon and Sang-Gug Lee from the School of Electrical Engineering had developed electrochemical impedance spectroscopy (EIS) technology that can be used to improve the stability and performance of high-capacity batteries in electric vehicles.
EIS is a powerful tool that measures the impedance* magnitude and changes in a battery, allowing the evaluation of battery efficiency and loss. It is considered an important tool for assessing the state of charge (SOC) and state of health (SOH) of batteries. Additionally, it can be used to identify thermal characteristics, chemical/physical changes, predict battery life, and determine the causes of failures. *Battery Impedance: A measure of the resistance to current flow within the battery that is used to assess battery performance and condition.
However, traditional EIS equipment is expensive and complex, making it difficult to install, operate, and maintain. Moreover, due to sensitivity and precision limitations, applying current disturbances of several amperes (A) to a battery can cause significant electrical stress, increasing the risk of battery failure or fire and making it difficult to use in practice.
< Figure 1. Flow chart for diagnosis and prevention of unexpected combustion via the use of the electrochemical impedance spectroscopy (EIS) for the batteries for electric vehicles. >
To address this, the KAIST research team developed and validated a low-current EIS system for diagnosing the condition and health of high-capacity EV batteries. This EIS system can precisely measure battery impedance with low current disturbances (10mA), minimizing thermal effects and safety issues during the measurement process.
In addition, the system minimizes bulky and costly components, making it easy to integrate into vehicles. The system was proven effective in identifying the electrochemical properties of batteries under various operating conditions, including different temperatures and SOC levels.
Professor Kyeongha Kwon (the corresponding author) explained, “This system can be easily integrated into the battery management system (BMS) of electric vehicles and has demonstrated high measurement accuracy while significantly reducing the cost and complexity compared to traditional high-current EIS methods. It can contribute to battery diagnosis and performance improvements not only for electric vehicles but also for energy storage systems (ESS).”
This research, in which Young-Nam Lee, a doctoral student in the School of Electrical Engineering at KAIST participated as the first author, was published in the prestigious international journal IEEE Transactions on Industrial Electronics (top 2% in the field; IF 7.5) on September 5th. (Paper Title: Small-Perturbation Electrochemical Impedance Spectroscopy System With High Accuracy for High-Capacity Batteries in Electric Vehicles, Link: https://ieeexplore.ieee.org/document/10666864)
< Figure 2. Impedance measurement results of large-capacity batteries for electric vehicles. ZEW (commercial EW; MP10, Wonatech) versus ZMEAS (proposed system) >
This research was supported by the Basic Research Program of the National Research Foundation of Korea, the Next-Generation Intelligent Semiconductor Technology Development Program of the Korea Evaluation Institute of Industrial Technology, and the AI Semiconductor Graduate Program of the Institute of Information & Communications Technology Planning & Evaluation.
2024.10.17 View 7612 -
 KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 7111
KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 7111 -
 KAIST Develops Janus-like Metasurface Technology that Acts According to the Direction of Light
Metasurface technology is an advanced optical technology that is thinner, lighter, and capable of precisely controlling light through nanometer-sized artificial structures compared to conventional technologies. KAIST researchers have overcome the limitations of existing metasurface technologies and successfully designed a Janus metasurface capable of perfectly controlling asymmetric light transmission. By applying this technology, they also proposed an innovative method to significantly enhance security by only decoding information under specific conditions.
KAIST (represented by President Kwang Hyung Lee) announced on the 15th of October that a research team led by Professor Jonghwa Shin from the Department of Materials Science and Engineering had developed a Janus metasurface capable of perfectly controlling asymmetric light transmission.
Asymmetric properties, which react differently depending on the direction, play a crucial role in various fields of science and engineering. The Janus metasurface developed by the research team implements an optical system capable of performing different functions in both directions.
Like the Roman god Janus with two faces, this metasurface shows entirely different optical responses depending on the direction of incoming light, effectively operating two independent optical systems with a single device (for example, a metasurface that acts as a magnifying lens in one direction and as a polarized camera in the other). In other words, by using this technology, it's possible to operate two different optical systems (e.g., a lens and a hologram) depending on the direction of the light.
This achievement addresses a challenge that existing metasurface technologies had not resolved. Conventional metasurface technology had limitations in selectively controlling the three properties of light—intensity, phase, and polarization—based on the direction of incidence.
The research team proposed a solution based on mathematical and physical principles, and succeeded in experimentally implementing different vector holograms in both directions. Through this achievement, they showcased a complete asymmetric light transmission control technology.
< Figure 1. Schematics of a device featuring asymmetric transmission. a) Device operating as a magnifying lens for back-side illumination. b) Device operating as a polarization camera for front-side illumination. >
Additionally, the research team developed a new optical encryption technology based on this metasurface technology. By using the Janus metasurface, they implemented a vector hologram that generates different images depending on the direction and polarization state of incoming light, showcasing an optical encryption system that significantly enhances security by allowing information to be decoded only under specific conditions.
This technology is expected to serve as a next-generation security solution, applicable in various fields such as quantum communication and secure data transmission.
Furthermore, the ultra-thin structure of the metasurface is expected to significantly reduce the volume and weight of traditional optical devices, contributing greatly to the miniaturization and lightweight design of next-generation devices.
< Figure 2. Experimental demonstration of Janus vectorial holograms. With front illuminations, vector images of the butterfly and the grasshopper are created, and with the back-side illuminations, vector images of the ladybug and the beetle are created. >
Professor Jonghwa Shin from the Department of Materials Science and Engineering at KAIST stated, "This research has enabled the complete asymmetric transmission control of light’s intensity, phase, and polarization, which has been a long-standing challenge in optics. It has opened up the possibility of developing various applied optical devices." He added, "We plan to continue developing optical devices that can be applied to various fields such as augmented reality (AR), holographic displays, and LiDAR systems for autonomous vehicles, utilizing the full potential of metasurface technology."
This research, in which Hyeonhee Kim (a doctoral student in the Department of Materials Science and Engineering at KAIST) and Joonkyo Jung participated as co-first authors, was published online in the international journal Advanced Materials and is scheduled to be published in the October 31 issue. (Title of the paper: "Bidirectional Vectorial Holography Using Bi-Layer Metasurfaces and Its Application to Optical Encryption")
The research was supported by the Nano Materials Technology Development Program and the Mid-Career Researcher Program of the National Research Foundation of Korea.
2024.10.15 View 4810
KAIST Develops Janus-like Metasurface Technology that Acts According to the Direction of Light
Metasurface technology is an advanced optical technology that is thinner, lighter, and capable of precisely controlling light through nanometer-sized artificial structures compared to conventional technologies. KAIST researchers have overcome the limitations of existing metasurface technologies and successfully designed a Janus metasurface capable of perfectly controlling asymmetric light transmission. By applying this technology, they also proposed an innovative method to significantly enhance security by only decoding information under specific conditions.
KAIST (represented by President Kwang Hyung Lee) announced on the 15th of October that a research team led by Professor Jonghwa Shin from the Department of Materials Science and Engineering had developed a Janus metasurface capable of perfectly controlling asymmetric light transmission.
Asymmetric properties, which react differently depending on the direction, play a crucial role in various fields of science and engineering. The Janus metasurface developed by the research team implements an optical system capable of performing different functions in both directions.
Like the Roman god Janus with two faces, this metasurface shows entirely different optical responses depending on the direction of incoming light, effectively operating two independent optical systems with a single device (for example, a metasurface that acts as a magnifying lens in one direction and as a polarized camera in the other). In other words, by using this technology, it's possible to operate two different optical systems (e.g., a lens and a hologram) depending on the direction of the light.
This achievement addresses a challenge that existing metasurface technologies had not resolved. Conventional metasurface technology had limitations in selectively controlling the three properties of light—intensity, phase, and polarization—based on the direction of incidence.
The research team proposed a solution based on mathematical and physical principles, and succeeded in experimentally implementing different vector holograms in both directions. Through this achievement, they showcased a complete asymmetric light transmission control technology.
< Figure 1. Schematics of a device featuring asymmetric transmission. a) Device operating as a magnifying lens for back-side illumination. b) Device operating as a polarization camera for front-side illumination. >
Additionally, the research team developed a new optical encryption technology based on this metasurface technology. By using the Janus metasurface, they implemented a vector hologram that generates different images depending on the direction and polarization state of incoming light, showcasing an optical encryption system that significantly enhances security by allowing information to be decoded only under specific conditions.
This technology is expected to serve as a next-generation security solution, applicable in various fields such as quantum communication and secure data transmission.
Furthermore, the ultra-thin structure of the metasurface is expected to significantly reduce the volume and weight of traditional optical devices, contributing greatly to the miniaturization and lightweight design of next-generation devices.
< Figure 2. Experimental demonstration of Janus vectorial holograms. With front illuminations, vector images of the butterfly and the grasshopper are created, and with the back-side illuminations, vector images of the ladybug and the beetle are created. >
Professor Jonghwa Shin from the Department of Materials Science and Engineering at KAIST stated, "This research has enabled the complete asymmetric transmission control of light’s intensity, phase, and polarization, which has been a long-standing challenge in optics. It has opened up the possibility of developing various applied optical devices." He added, "We plan to continue developing optical devices that can be applied to various fields such as augmented reality (AR), holographic displays, and LiDAR systems for autonomous vehicles, utilizing the full potential of metasurface technology."
This research, in which Hyeonhee Kim (a doctoral student in the Department of Materials Science and Engineering at KAIST) and Joonkyo Jung participated as co-first authors, was published online in the international journal Advanced Materials and is scheduled to be published in the October 31 issue. (Title of the paper: "Bidirectional Vectorial Holography Using Bi-Layer Metasurfaces and Its Application to Optical Encryption")
The research was supported by the Nano Materials Technology Development Program and the Mid-Career Researcher Program of the National Research Foundation of Korea.
2024.10.15 View 4810 -
 KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 6093
KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 6093 -
 KAIST Changes the Paradigm of Drug Discovery with World's First Atomic Editing
In pioneering drug development, the new technology that enables the easy and rapid editing of key atoms responsible for drug efficacy has been regarded as a fundamental and "dream" technology, revolutionizing the process of discovering potential drug candidates. KAIST researchers have become the first in the world to successfully develop single-atom editing technology that maximizes drug efficacy.
On October 8th, KAIST (represented by President Kwang-Hyung Lee) announced that Professor Yoonsu Park’s research team from the Department of Chemistry successfully developed technology that enables the easy editing and correction of oxygen atoms in furan compounds into nitrogen atoms, directly converting them into pyrrole frameworks, which are widely used in pharmaceuticals.
< Image. Conceptual image illustrating the main idea of the research >
This research was published in the prestigious scientific journal Science on October 3rd under the title "Photocatalytic Furan-to-Pyrrole Conversion."
Many drugs have complex chemical structures, but their efficacy is often determined by a single critical atom. Atoms like oxygen and nitrogen play a central role in enhancing the pharmacological effects of these drugs, particularly against viruses.
This phenomenon, where the introduction of specific atoms into a drug molecule dramatically affects its efficacy, is known as the "Single Atom Effect." In leading-edge drug development, discovering atoms that maximize drug efficacy is key.
However, evaluating the Single Atom Effect has traditionally required multi-step, costly synthesis processes, as it has been difficult to selectively edit single atoms within stable ring structures containing oxygen or nitrogen.
Professor Park’s team overcame this challenge by introducing a photocatalyst that uses light energy. They developed a photocatalyst that acts as a “molecular scissor,” freely cutting and attaching five-membered rings, enabling single-atom editing at room temperature and atmospheric pressure—a world first.
The team discovered a new reaction mechanism in which the excited molecular scissor removes oxygen from furan via single-electron oxidation and then sequentially adds a nitrogen atom.
Donghyeon Kim and Jaehyun You, the study's first authors and candidates in KAIST’s integrated master's and doctoral program in the Department of Chemistry, explained that this technique offers high versatility by utilizing light energy to replace harsh conditions. They further noted that the technology enables selective editing, even when applied to complex natural products or pharmaceuticals. Professor Yoonsu Park, who led the research, remarked, "This breakthrough, which allows for the selective editing of five-membered organic ring structures, will open new doors for building libraries of drug candidates, a key challenge in pharmaceuticals. I hope this foundational technology will be used to revolutionize the drug development process."
The significance of this research was highlighted in the Perspective section of Science, a feature where a peer scientist of prominence outside of the project group provides commentary on an impactful research.
This research was supported by the National Research Foundation of Korea’s Creative Research Program, the Cross-Generation Collaborative Lab Project at KAIST, and the POSCO Science Fellowship of the POSCO TJ Park Foundation.
2024.10.11 View 6540
KAIST Changes the Paradigm of Drug Discovery with World's First Atomic Editing
In pioneering drug development, the new technology that enables the easy and rapid editing of key atoms responsible for drug efficacy has been regarded as a fundamental and "dream" technology, revolutionizing the process of discovering potential drug candidates. KAIST researchers have become the first in the world to successfully develop single-atom editing technology that maximizes drug efficacy.
On October 8th, KAIST (represented by President Kwang-Hyung Lee) announced that Professor Yoonsu Park’s research team from the Department of Chemistry successfully developed technology that enables the easy editing and correction of oxygen atoms in furan compounds into nitrogen atoms, directly converting them into pyrrole frameworks, which are widely used in pharmaceuticals.
< Image. Conceptual image illustrating the main idea of the research >
This research was published in the prestigious scientific journal Science on October 3rd under the title "Photocatalytic Furan-to-Pyrrole Conversion."
Many drugs have complex chemical structures, but their efficacy is often determined by a single critical atom. Atoms like oxygen and nitrogen play a central role in enhancing the pharmacological effects of these drugs, particularly against viruses.
This phenomenon, where the introduction of specific atoms into a drug molecule dramatically affects its efficacy, is known as the "Single Atom Effect." In leading-edge drug development, discovering atoms that maximize drug efficacy is key.
However, evaluating the Single Atom Effect has traditionally required multi-step, costly synthesis processes, as it has been difficult to selectively edit single atoms within stable ring structures containing oxygen or nitrogen.
Professor Park’s team overcame this challenge by introducing a photocatalyst that uses light energy. They developed a photocatalyst that acts as a “molecular scissor,” freely cutting and attaching five-membered rings, enabling single-atom editing at room temperature and atmospheric pressure—a world first.
The team discovered a new reaction mechanism in which the excited molecular scissor removes oxygen from furan via single-electron oxidation and then sequentially adds a nitrogen atom.
Donghyeon Kim and Jaehyun You, the study's first authors and candidates in KAIST’s integrated master's and doctoral program in the Department of Chemistry, explained that this technique offers high versatility by utilizing light energy to replace harsh conditions. They further noted that the technology enables selective editing, even when applied to complex natural products or pharmaceuticals. Professor Yoonsu Park, who led the research, remarked, "This breakthrough, which allows for the selective editing of five-membered organic ring structures, will open new doors for building libraries of drug candidates, a key challenge in pharmaceuticals. I hope this foundational technology will be used to revolutionize the drug development process."
The significance of this research was highlighted in the Perspective section of Science, a feature where a peer scientist of prominence outside of the project group provides commentary on an impactful research.
This research was supported by the National Research Foundation of Korea’s Creative Research Program, the Cross-Generation Collaborative Lab Project at KAIST, and the POSCO Science Fellowship of the POSCO TJ Park Foundation.
2024.10.11 View 6540 -
 ‘Realizing the Dream Beyond Limits’… KAIST Space Institute opens
“KAIST Space Institute will present a new paradigm for space research and education, foster creative talents, and become a space research center to lead the advancement of national space initiatives” (KAIST President Kwang-Hyung Lee)
< Vision Declaration Ceremony Photo during Space Research Institute Opening Ceremony >
KAIST (President Kwang-Hyung Lee) opened the ‘Space Institute’, which brings together all of KAIST’s space technology capabilities to realize the dream of mankind leaping higher toward space, and held the opening ceremony on September 30th in the main auditorium of Daejeon. The opening ceremony included a vision declaration ceremony and a special lecture for KAIST Space Institute.
KAIST Space Institute is a newly established organization for space missions and convergence/core technology research that can lead the new space era. In September 2022, a promotion team was established to plan the specifics, and it was officially established as an organization within the school in April of this year to lead to this opening ceremony.
< Group Commemorative Photo during Space Research Institute Opening Ceremony >
Under the slogan of ‘Realizing the dreams beyond limits,’ the organization is to carry out projects to realize the vision of ▴ conducting space research that aims to be the first and expand the horizons of human life, ▴ presenting a new paradigm for space research and education as a global leading university space research cluster, ▴ contributing to domestic space technology innovation and space industry ecosystem establishment through verification and development of challenging space missions, and ▴ supporting sustainable national space development by fostering creative talents to lead space convergence.
To this end, the space research organizations that have been operated independently by various departments have been integrated and reorganized under the name of the Space Institute, and the following subordinate organizations will be established in the future: ▴ Artificial Satellite Research Institute, ▴ Space Technology Innovation Talent Training Center, ▴ Space Core Technology Research Institute, and ▴ Space Convergence Technology Research Institute.
At the same time, ▴ Hanwha Space Hub-KAIST Space Research Center, ▴ Perigee-KAIST Rocket Research Center, and ▴ Future Space Education Center will be reorganized under the Space Institute to pool their capabilities.
< President Kwang-Hyung Lee giving a welcoming speech at Space Research Institute Opening Ceremony >
The Satellite Research Institute, a subordinate organization, successfully developed and launched Korea’s first mass-produced ‘ultra-small cluster satellite 1’ in April of this year. It is currently conducting active research with the goal of launching a satellite in 2027 to verify active control technology for space objects.
The first special lecture was given by Professor Se-jin Kwon of the Department of Aerospace Engineering on the topic of ‘KAIST Space Exploration Journey and Vision.’ The institute looked back on its space development history and present future research and development directions and operational plans.
Next, Professor Daniel J. Scheeres, who was appointed as Co-director of the Space Institute and a Visiting Professor of KAIST Department of Aerospace Engineering, delivered a message on the topic of ‘The Future of Asteroid Exploration.’ He talked about preventing asteroid collisions, and lectured on the spirit of challenge for continuous exploration and future research issues.
Co-director Scheeres is a leading scholar in the fields of space engineering and celestial dynamics who was invited to lead the KAIST Space Institute’s leading international cooperation activities. He is well known as a key researcher who led asteroid research, including the ‘DART’ mission, in which the National Aeronautics and Space Administration (NASA) experimented with changing the trajectory an asteroid by colliding it with a spacecraft.
After its full-fledged opening, the Space Institute will be operated as an open organization where domestic and foreign experts as well as KAIST students can freely participate in research and education.
< Director Jae-heung Han introducing the organization at Space Research Institute Opening Ceremony >
KAIST Space Institute Director Jae-heung Han said, “On the 10th anniversary of the death of the late Dr. Soon-dal Choi, who helped establish space technology in Korea, we have established KAIST Space Institute to inherit the spirit of ‘Uri-Byul’, our first satellite, and develop subsequent achievements.”
He also said, “With a sense of mission to challenge limitations and venture into the greater unknown, we will strive to strengthen our space research and development capabilities and our global status as a leading aerospace country.”
2024.09.30 View 3883
‘Realizing the Dream Beyond Limits’… KAIST Space Institute opens
“KAIST Space Institute will present a new paradigm for space research and education, foster creative talents, and become a space research center to lead the advancement of national space initiatives” (KAIST President Kwang-Hyung Lee)
< Vision Declaration Ceremony Photo during Space Research Institute Opening Ceremony >
KAIST (President Kwang-Hyung Lee) opened the ‘Space Institute’, which brings together all of KAIST’s space technology capabilities to realize the dream of mankind leaping higher toward space, and held the opening ceremony on September 30th in the main auditorium of Daejeon. The opening ceremony included a vision declaration ceremony and a special lecture for KAIST Space Institute.
KAIST Space Institute is a newly established organization for space missions and convergence/core technology research that can lead the new space era. In September 2022, a promotion team was established to plan the specifics, and it was officially established as an organization within the school in April of this year to lead to this opening ceremony.
< Group Commemorative Photo during Space Research Institute Opening Ceremony >
Under the slogan of ‘Realizing the dreams beyond limits,’ the organization is to carry out projects to realize the vision of ▴ conducting space research that aims to be the first and expand the horizons of human life, ▴ presenting a new paradigm for space research and education as a global leading university space research cluster, ▴ contributing to domestic space technology innovation and space industry ecosystem establishment through verification and development of challenging space missions, and ▴ supporting sustainable national space development by fostering creative talents to lead space convergence.
To this end, the space research organizations that have been operated independently by various departments have been integrated and reorganized under the name of the Space Institute, and the following subordinate organizations will be established in the future: ▴ Artificial Satellite Research Institute, ▴ Space Technology Innovation Talent Training Center, ▴ Space Core Technology Research Institute, and ▴ Space Convergence Technology Research Institute.
At the same time, ▴ Hanwha Space Hub-KAIST Space Research Center, ▴ Perigee-KAIST Rocket Research Center, and ▴ Future Space Education Center will be reorganized under the Space Institute to pool their capabilities.
< President Kwang-Hyung Lee giving a welcoming speech at Space Research Institute Opening Ceremony >
The Satellite Research Institute, a subordinate organization, successfully developed and launched Korea’s first mass-produced ‘ultra-small cluster satellite 1’ in April of this year. It is currently conducting active research with the goal of launching a satellite in 2027 to verify active control technology for space objects.
The first special lecture was given by Professor Se-jin Kwon of the Department of Aerospace Engineering on the topic of ‘KAIST Space Exploration Journey and Vision.’ The institute looked back on its space development history and present future research and development directions and operational plans.
Next, Professor Daniel J. Scheeres, who was appointed as Co-director of the Space Institute and a Visiting Professor of KAIST Department of Aerospace Engineering, delivered a message on the topic of ‘The Future of Asteroid Exploration.’ He talked about preventing asteroid collisions, and lectured on the spirit of challenge for continuous exploration and future research issues.
Co-director Scheeres is a leading scholar in the fields of space engineering and celestial dynamics who was invited to lead the KAIST Space Institute’s leading international cooperation activities. He is well known as a key researcher who led asteroid research, including the ‘DART’ mission, in which the National Aeronautics and Space Administration (NASA) experimented with changing the trajectory an asteroid by colliding it with a spacecraft.
After its full-fledged opening, the Space Institute will be operated as an open organization where domestic and foreign experts as well as KAIST students can freely participate in research and education.
< Director Jae-heung Han introducing the organization at Space Research Institute Opening Ceremony >
KAIST Space Institute Director Jae-heung Han said, “On the 10th anniversary of the death of the late Dr. Soon-dal Choi, who helped establish space technology in Korea, we have established KAIST Space Institute to inherit the spirit of ‘Uri-Byul’, our first satellite, and develop subsequent achievements.”
He also said, “With a sense of mission to challenge limitations and venture into the greater unknown, we will strive to strengthen our space research and development capabilities and our global status as a leading aerospace country.”
2024.09.30 View 3883 -
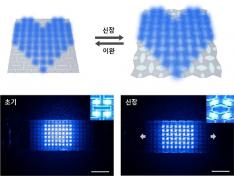 KAIST Develops Stretchable Displays Featuring 25% Expansion Without Image Distortion
Stretchable displays, praised for their spatial efficiency, design flexibility, and human-like flexibility, are seen as the next generation of display technology. A team of Korean researchers has developed a stretchable display that can expand by 25% while maintaining clear image quality without distortion. It can also stretch and contract up to 5,000 times at 15% expansion without any performance degradation, making it the first deformation-free stretchable display with a negative Poisson's ratio* developed in Korea.
*Poisson’s ratio of -1: A ratio where both width and length stretch equally, expressed as a negative value. A positive Poisson's ratio represents the ratio where horizontal stretching leads to vertical contraction, which is the case for most materials.
KAIST (represented by President Kwang-Hyung Lee) announced on the 20th of August that a research team led by Professor Byeong-Soo Bae of the Department of Materials Science and Engineering (Director of the Wearable Platform Materials Technology Center) , in collaboration with the Korea Institute of Machinery & Materials (President Seoghyeon Ryu), successfully developed a stretchable display substrate that suppresses image distortion through omnidirectional stretchability.
Currently, most stretchable displays are made with highly elastic elastomer* materials, but these materials possess a positive Poisson's ratio, causing unavoidable image distortion when the display is stretched.
*Elastomer: A polymer with elasticity similar to rubber.
To address this, the introduction of auxetic* meta-structures has been gaining attention. Unlike conventional materials, auxetic structures have a unique 'negative Poisson's ratio,' expanding in all directions when stretched in just one direction. However, traditional auxetic structures contain many empty spaces, limiting their stability and usability in display substrates.
*Auxetic structure: A special geometric structure that exhibits a negative Poisson's ratio.
To tackle the issue of image distortion, Professor Bae's research team developed a method to create a seamless surface for the auxetic meta-structure, achieving the ideal negative Poisson's ratio of -1 and overcoming the biggest challenge in auxetic meta-structures.
To overcome the second issue of elastic modulus*, the team inserted a textile made of glass fiber bundles with a diameter of just 25 micrometers (a quarter of the thickness of human hair) into the elastomer material. They then filled the empty spaces with the same elastomer, creating a flat and stable integrated film without gaps.
*Elastic Modulus: The ratio that indicates the extent of deformation when force is applied to a material. A higher elastic modulus means that the material is less likely to deform under force.
The research team theoretically identified that the difference in elasticity between the auxetic structure and the elastomer material directly influences the negative Poisson's ratio and successfully achieved an elasticity difference of over 230,000 times, producing a film with a Poisson's ratio of -1, the theoretical limit.
< Figure 2. Deformation of S-AUX film. a) Configurations and visualized principal strain distribution of the optimized S-AUX film at various strain rates. b) Biaxial stretching image. While pristine elastomer shrinks in the directions that were not stretched, S-AUX film developed in this study expands in all directions simultaneously while maintaining its original shape. >
Professor Byeong-Soo Bae, who led the study, explained, "Preventing image distortion using auxetic structures in stretchable displays is a core technology, but it has faced challenges due to the many empty spaces in the surface, making it difficult to use as a substrate. This research outcome is expected to significantly accelerate commercialization through high-resolution, distortion-free stretchable display applications that utilize the entire surface."
This study, co-authored by Dr. Yung Lee from KAIST’s Department of Materials Science and Engineering and Dr. Bongkyun Jang from the Korea Institute of Machinery & Materials, was published on August 20th in the international journal Nature Communications under the title "A seamless auxetic substrate with a negative Poisson's ratio of –1".
The research was supported by the Wearable Platform Materials Technology Center at KAIST, the Korea Institute of Machinery & Materials, and LG Display.
< Figure 3. Structural configuration of the distortion-free display components on the S-AUX film and a contour image of a micro-LED chip transferred onto the S-AUX film. >
< Figure 4. Schematic illustrations and photographic images of the S-AUX film-based image: distortion-free display in its stretched state and released state. >
2024.09.20 View 6733
KAIST Develops Stretchable Displays Featuring 25% Expansion Without Image Distortion
Stretchable displays, praised for their spatial efficiency, design flexibility, and human-like flexibility, are seen as the next generation of display technology. A team of Korean researchers has developed a stretchable display that can expand by 25% while maintaining clear image quality without distortion. It can also stretch and contract up to 5,000 times at 15% expansion without any performance degradation, making it the first deformation-free stretchable display with a negative Poisson's ratio* developed in Korea.
*Poisson’s ratio of -1: A ratio where both width and length stretch equally, expressed as a negative value. A positive Poisson's ratio represents the ratio where horizontal stretching leads to vertical contraction, which is the case for most materials.
KAIST (represented by President Kwang-Hyung Lee) announced on the 20th of August that a research team led by Professor Byeong-Soo Bae of the Department of Materials Science and Engineering (Director of the Wearable Platform Materials Technology Center) , in collaboration with the Korea Institute of Machinery & Materials (President Seoghyeon Ryu), successfully developed a stretchable display substrate that suppresses image distortion through omnidirectional stretchability.
Currently, most stretchable displays are made with highly elastic elastomer* materials, but these materials possess a positive Poisson's ratio, causing unavoidable image distortion when the display is stretched.
*Elastomer: A polymer with elasticity similar to rubber.
To address this, the introduction of auxetic* meta-structures has been gaining attention. Unlike conventional materials, auxetic structures have a unique 'negative Poisson's ratio,' expanding in all directions when stretched in just one direction. However, traditional auxetic structures contain many empty spaces, limiting their stability and usability in display substrates.
*Auxetic structure: A special geometric structure that exhibits a negative Poisson's ratio.
To tackle the issue of image distortion, Professor Bae's research team developed a method to create a seamless surface for the auxetic meta-structure, achieving the ideal negative Poisson's ratio of -1 and overcoming the biggest challenge in auxetic meta-structures.
To overcome the second issue of elastic modulus*, the team inserted a textile made of glass fiber bundles with a diameter of just 25 micrometers (a quarter of the thickness of human hair) into the elastomer material. They then filled the empty spaces with the same elastomer, creating a flat and stable integrated film without gaps.
*Elastic Modulus: The ratio that indicates the extent of deformation when force is applied to a material. A higher elastic modulus means that the material is less likely to deform under force.
The research team theoretically identified that the difference in elasticity between the auxetic structure and the elastomer material directly influences the negative Poisson's ratio and successfully achieved an elasticity difference of over 230,000 times, producing a film with a Poisson's ratio of -1, the theoretical limit.
< Figure 2. Deformation of S-AUX film. a) Configurations and visualized principal strain distribution of the optimized S-AUX film at various strain rates. b) Biaxial stretching image. While pristine elastomer shrinks in the directions that were not stretched, S-AUX film developed in this study expands in all directions simultaneously while maintaining its original shape. >
Professor Byeong-Soo Bae, who led the study, explained, "Preventing image distortion using auxetic structures in stretchable displays is a core technology, but it has faced challenges due to the many empty spaces in the surface, making it difficult to use as a substrate. This research outcome is expected to significantly accelerate commercialization through high-resolution, distortion-free stretchable display applications that utilize the entire surface."
This study, co-authored by Dr. Yung Lee from KAIST’s Department of Materials Science and Engineering and Dr. Bongkyun Jang from the Korea Institute of Machinery & Materials, was published on August 20th in the international journal Nature Communications under the title "A seamless auxetic substrate with a negative Poisson's ratio of –1".
The research was supported by the Wearable Platform Materials Technology Center at KAIST, the Korea Institute of Machinery & Materials, and LG Display.
< Figure 3. Structural configuration of the distortion-free display components on the S-AUX film and a contour image of a micro-LED chip transferred onto the S-AUX film. >
< Figure 4. Schematic illustrations and photographic images of the S-AUX film-based image: distortion-free display in its stretched state and released state. >
2024.09.20 View 6733 -
 A heated battle of science and sports, who is the winner of this year's KA-PO War?
< Photos from KAIST-POSTECH Science War (photographed by Student Junhyeok Park of KAIST Freshman Course) >
The future leaders of science at KAIST and POSTECH (President Seong Keun Kim) held their annual science and sporting event at POSTECH for two days from September 20th to 21st. The 'KAIST-POSTECH Science War (hereafter KA-PO War)' is a festival consisting of science and sports games and various side events to promote exchange and cooperation between the two universities. It is also known by the nickname 'Science War'.
KA-PO War consists of △Science Games △e-Sports △Athletics, and the two universities compete in a total of 7 events including hacking competitions, artificial intelligence programming (AI), science quizzes, League of Legends (LOL), baseball, basketball, and soccer. In particular, the 9-hour ‘hacking competition’ and the ‘AI programming’ competition, which pits the AI design strategies of the two universities against each other, are famous for its competitions that are not easily seen at other universities.
The future science leaders of KAIST and POSTECH competed with their brains and physical strength even in the rain, and in the competition where the university that wins more than 4 out of 7 events wins, KAIST won with a score of 6 to 1 after fierce matches.
In addition, for this KAIST competition, Byeong-cheol Kim, the CEO of POSTECH Holdings and an alumnus of the Department of Industrial Management at POSTECH, donated 10 million won for the preparation of this event.
< Photos from KA-PO War site (photographed by Student Junhyeok Park of KAIST Freshman Course) >
KA-PO War Director Henry Kwon (KAIST Department of Electrical and Electronic Engineering) said, “I would like to thank the planning team and supporters who worked hard to make it a successful event. This year’s KA-PO War shined even brighter because of the students from both universities who cheered passionately and played games despite the hot weather and rain. I hope this will be an opportunity to further strengthen the bond and sense of belonging among engineering students.”
KA-PO War Preparatory Committee Chairman Sa-joon Hong (POSTECH Department of Physics) said, “As if to manifest this year’s motto, ‘BLAST,’ the intense heat swept through the competition, and regardless of the outcome, the students from both universities took away unforgettable and precious memories.”
As a kind of student festival jointly held between the two universities, which have been held annually since 2002, KAIST-POSTECH Science Wars is held under a different name each year depending on the venue. This year, it was held at POSTECH, thus called ‘KA-PO War.’
2024.09.19 View 3839
A heated battle of science and sports, who is the winner of this year's KA-PO War?
< Photos from KAIST-POSTECH Science War (photographed by Student Junhyeok Park of KAIST Freshman Course) >
The future leaders of science at KAIST and POSTECH (President Seong Keun Kim) held their annual science and sporting event at POSTECH for two days from September 20th to 21st. The 'KAIST-POSTECH Science War (hereafter KA-PO War)' is a festival consisting of science and sports games and various side events to promote exchange and cooperation between the two universities. It is also known by the nickname 'Science War'.
KA-PO War consists of △Science Games △e-Sports △Athletics, and the two universities compete in a total of 7 events including hacking competitions, artificial intelligence programming (AI), science quizzes, League of Legends (LOL), baseball, basketball, and soccer. In particular, the 9-hour ‘hacking competition’ and the ‘AI programming’ competition, which pits the AI design strategies of the two universities against each other, are famous for its competitions that are not easily seen at other universities.
The future science leaders of KAIST and POSTECH competed with their brains and physical strength even in the rain, and in the competition where the university that wins more than 4 out of 7 events wins, KAIST won with a score of 6 to 1 after fierce matches.
In addition, for this KAIST competition, Byeong-cheol Kim, the CEO of POSTECH Holdings and an alumnus of the Department of Industrial Management at POSTECH, donated 10 million won for the preparation of this event.
< Photos from KA-PO War site (photographed by Student Junhyeok Park of KAIST Freshman Course) >
KA-PO War Director Henry Kwon (KAIST Department of Electrical and Electronic Engineering) said, “I would like to thank the planning team and supporters who worked hard to make it a successful event. This year’s KA-PO War shined even brighter because of the students from both universities who cheered passionately and played games despite the hot weather and rain. I hope this will be an opportunity to further strengthen the bond and sense of belonging among engineering students.”
KA-PO War Preparatory Committee Chairman Sa-joon Hong (POSTECH Department of Physics) said, “As if to manifest this year’s motto, ‘BLAST,’ the intense heat swept through the competition, and regardless of the outcome, the students from both universities took away unforgettable and precious memories.”
As a kind of student festival jointly held between the two universities, which have been held annually since 2002, KAIST-POSTECH Science Wars is held under a different name each year depending on the venue. This year, it was held at POSTECH, thus called ‘KA-PO War.’
2024.09.19 View 3839 -
 Professor Jimin Park and Dr. Inho Kim join the ranks of the 2024 "35 Innovators Under 35" by the MIT Technology Review
< (From left) Professor Jimin Park of the Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate of the Department of Materials Science and Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 13th of September that Professor Jimin Park from KAIST’s Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate from the Department of Materials Science and Engineering (currently a postdoctoral researcher at Caltech), were selected by the MIT Technology Review as the 2024 "35 Innovators Under 35”.
The MIT Technology Review, first published in 1899 by the Massachusetts Institute of Technology, is the world’s oldest and most influential magazine on science and technology, offering in-depth analysis across various technology fields, expanding knowledge and providing insights into cutting-edge technology trends.
Since 1999, the magazine has annually named 35 innovators under the age of 35, recognizing young talents making groundbreaking contributions in modern technology fields. The recognition is globally considered a prestigious honor and a dream for young researchers in the science and technology community.
< Image 1. Introduction for Professor Jimin Park at the Meet 35 Innovators Under 35 Summit 2024 >
Professor Jimin Park is developing next-generation bio-interfaces that link artificial materials with living organisms, and is engaged in advanced research in areas such as digital healthcare and carbon-neutral compound manufacturing technologies. In 2014, Professor Park was also recognized as one of the ‘Asia Pacific Innovators Under 35’ by the MIT Technology Review, which highlights young scientists in the Asia-Pacific region.
Professor Park responded, “It’s a great honor to be named as one of the young innovators by the MIT Technology Review, a symbol of innovation with a long history. I will continue to pursue challenging, interdisciplinary research to develop next-generation interfaces that seamlessly connect artificial materials and living organisms, from atomic to system levels.”
< Image 2. Introduction for Dr. Inho Kim as the 2024 Innovator of Materials Science for 35 Innovators Under 35 >
Dr. Inho Kim, who earned his PhD from KAIST in 2020 under the supervision of Professor Sang Ouk Kim from the Department of Materials Science and Engineering, recently succeeded in developing a new artificial muscle using composite fibers. This new material is considered the most human-like muscle ever reported in scientific literature, while also being 17 times stronger than natural human muscle.
Dr. Kim is researching the application of artificial muscle fibers in next-generation wearable assistive devices that move more naturally, like humans or animals, noting that the fibers are lightweight, flexible, and exhibit conductivity during contraction, enabling real-time feedback. Recognized for this potential, Dr. Inho Kim was named one of the '35 Innovators Under 35' this year, making him the first researcher to win the honor with the research conducted at KAIST and a PhD earned from Korea.
Dr. Kim stated, “I aim to develop robots using these new materials that can replace today’s expensive and heavy exoskeleton suits by eliminating motors and rigid frames. This will significantly reduce costs and allow for better customization, making cutting-edge technology more accessible to those who need it most, like children with cerebral palsy.”
2024.09.13 View 9368
Professor Jimin Park and Dr. Inho Kim join the ranks of the 2024 "35 Innovators Under 35" by the MIT Technology Review
< (From left) Professor Jimin Park of the Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate of the Department of Materials Science and Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 13th of September that Professor Jimin Park from KAIST’s Department of Chemical and Biomolecular Engineering and Dr. Inho Kim, a graduate from the Department of Materials Science and Engineering (currently a postdoctoral researcher at Caltech), were selected by the MIT Technology Review as the 2024 "35 Innovators Under 35”.
The MIT Technology Review, first published in 1899 by the Massachusetts Institute of Technology, is the world’s oldest and most influential magazine on science and technology, offering in-depth analysis across various technology fields, expanding knowledge and providing insights into cutting-edge technology trends.
Since 1999, the magazine has annually named 35 innovators under the age of 35, recognizing young talents making groundbreaking contributions in modern technology fields. The recognition is globally considered a prestigious honor and a dream for young researchers in the science and technology community.
< Image 1. Introduction for Professor Jimin Park at the Meet 35 Innovators Under 35 Summit 2024 >
Professor Jimin Park is developing next-generation bio-interfaces that link artificial materials with living organisms, and is engaged in advanced research in areas such as digital healthcare and carbon-neutral compound manufacturing technologies. In 2014, Professor Park was also recognized as one of the ‘Asia Pacific Innovators Under 35’ by the MIT Technology Review, which highlights young scientists in the Asia-Pacific region.
Professor Park responded, “It’s a great honor to be named as one of the young innovators by the MIT Technology Review, a symbol of innovation with a long history. I will continue to pursue challenging, interdisciplinary research to develop next-generation interfaces that seamlessly connect artificial materials and living organisms, from atomic to system levels.”
< Image 2. Introduction for Dr. Inho Kim as the 2024 Innovator of Materials Science for 35 Innovators Under 35 >
Dr. Inho Kim, who earned his PhD from KAIST in 2020 under the supervision of Professor Sang Ouk Kim from the Department of Materials Science and Engineering, recently succeeded in developing a new artificial muscle using composite fibers. This new material is considered the most human-like muscle ever reported in scientific literature, while also being 17 times stronger than natural human muscle.
Dr. Kim is researching the application of artificial muscle fibers in next-generation wearable assistive devices that move more naturally, like humans or animals, noting that the fibers are lightweight, flexible, and exhibit conductivity during contraction, enabling real-time feedback. Recognized for this potential, Dr. Inho Kim was named one of the '35 Innovators Under 35' this year, making him the first researcher to win the honor with the research conducted at KAIST and a PhD earned from Korea.
Dr. Kim stated, “I aim to develop robots using these new materials that can replace today’s expensive and heavy exoskeleton suits by eliminating motors and rigid frames. This will significantly reduce costs and allow for better customization, making cutting-edge technology more accessible to those who need it most, like children with cerebral palsy.”
2024.09.13 View 9368