%64%72%69%76%69%6e%67
-
 Mobility 2025 Technology Demonstration Day Held... Commercialization Achievements Unveiled
< Kitae Jang, Director of Mobility Research Institute, Hyeong-sik Jeon, Vice Governor for Political Affairs of South Chungcheong Province and demonstration officials >
KAIST's e announced on the September 23rd that it held the "2025 Technology Demonstration Day" at the Naepo Knowledge Industry Center in Chungcheongnam-do to showcase successful cases of its research findings being adopted by the industry. The event was organized to present the process of commercializing KAIST's accumulated mobility research achievements through collaboration with companies.
The KAIST Mobility Research Institute aims to solve our society's mobility problems by conducting industry-academia research in various technology fields, including autonomous driving, Urban Air Mobility (UAM/UAV), eco-friendly mobility technologies, as well as artificial intelligence (AI) and energy. This demonstration was the result of a project linked to a consignment from Chungcheongnam-do, and it showed a practical example of research achievements connecting with the local industry.
At the demonstration, achievements that have entered the commercialization stage were presented with collaborating companies, including faculty startups FutureEV Co., Ltd. (CEO: Kim Kyung-soo), Dochak Co., Ltd. (CEO: Kim In-hee), and alumnus startup NOTA Co., Ltd. (CEO: Chae Myung-soo). The six core technologies unveiled were: △Mobile Energy Storage System (ESS) Power Platform △Naepo Digital Twin △Autonomous Driving Robots Specialized for SMEs △Remote-Driving Valet Parking △Autonomous Driving Testbed △AI Computing Center.
< Image of the remote-controlled autonomous vehicle developed by Professor In-hee Kim >
The "Mobile Energy Storage System (ESS) Power Platform" is a technology led by Professor Lee Yoon-gu and co-developed with FutureEV Co., Ltd., ECOCAB Co., Ltd., Hanyang Electric Co., Ltd., and Uptech Co., Ltd. It's a solution that can establish a stable power grid in areas with difficult power supply, such as disaster sites or islands, proving its commercial potential in the eco-friendly power sector.
The "Naepo Digital Twin" was commercialized by a research team led by Senior Researcher Kim Tae-kyun in collaboration with Dochak Co., Ltd. It can simulate real-world city and traffic conditions in a 3D virtual environment for traffic monitoring, situation prediction, disaster response, and policy verification. It's gaining attention as a core technology for building smart cities.
The "Autonomous Driving Robots Specialized for SMEs" was developed by research teams led by Professors Kim Kyung-soo and Choi Geun-ha in collaboration with L-Line Co., Ltd. and Torrent Systems Co., Ltd. This autonomous logistics robot, optimized for the logistics environment of small and medium-sized enterprises, demonstrated precise movement and stacking of logistics racks inside a factory at the event, confirming the potential for innovation in the SME manufacturing sector.
The "Remote-Driving Valet Parking Technology" is being commercialized by Professor Kim In-hee in collaboration with Dochak Co., Ltd., Torrent Systems Co., Ltd., E-motion Co., Ltd., and the National Science and Technology Research Network KREONET (operated by the Korea Institute of Science and Technology Information). During the demonstration, a vehicle remotely controlled from Daejeon traveled to the Naepo Research Institute and completed parking at its destination, proving the stability and practicality of remote autonomous driving.
< Image of the KAIST Mobility Research Institute Technology Demonstration Day poster >
The "Autonomous Driving Testbed" is a platform built by Professors Ahn Hee-jin and Noh Min-kyun. It's an example of expanding research achievements in reduced-scale vehicle-based autonomous driving into a platform for education and industrial verification. The KAIST Mobility Research Institute plans to use this as a foundation for the "2025 KAIST Mobility Challenge Competition" next year to simultaneously foster next-generation talent and promote technology commercialization.
The "AI Computing Center" was unveiled by NOTA Co., Ltd., which is soon to be listed on KOSDAQ. The company introduced its RE100-based power system and AI optimization technology and presented its vision for collaboration with tenant companies, stating its goal to contribute to the expansion of the AI ecosystem.
Kitae Jang, Director of the KAIST Mobility Research Institute, stated, "This demonstration was an opportunity to show the concrete process of KAIST's research achievements being adopted by the industry." He added, "We will continue to lead the commercialization of future mobility and AI technologies and the development of local industries through close collaboration with local governments and companies."
KAIST President Kwang Hyung Lee emphasized, "KAIST's mission is to contribute to the nation and local communities through technological innovation. We find it meaningful to see our research achievements creating real change in the industry and will continue to lead global mobility innovation and the creation of new value through collaboration with companies and local governments."
2025.09.24 View 1916
Mobility 2025 Technology Demonstration Day Held... Commercialization Achievements Unveiled
< Kitae Jang, Director of Mobility Research Institute, Hyeong-sik Jeon, Vice Governor for Political Affairs of South Chungcheong Province and demonstration officials >
KAIST's e announced on the September 23rd that it held the "2025 Technology Demonstration Day" at the Naepo Knowledge Industry Center in Chungcheongnam-do to showcase successful cases of its research findings being adopted by the industry. The event was organized to present the process of commercializing KAIST's accumulated mobility research achievements through collaboration with companies.
The KAIST Mobility Research Institute aims to solve our society's mobility problems by conducting industry-academia research in various technology fields, including autonomous driving, Urban Air Mobility (UAM/UAV), eco-friendly mobility technologies, as well as artificial intelligence (AI) and energy. This demonstration was the result of a project linked to a consignment from Chungcheongnam-do, and it showed a practical example of research achievements connecting with the local industry.
At the demonstration, achievements that have entered the commercialization stage were presented with collaborating companies, including faculty startups FutureEV Co., Ltd. (CEO: Kim Kyung-soo), Dochak Co., Ltd. (CEO: Kim In-hee), and alumnus startup NOTA Co., Ltd. (CEO: Chae Myung-soo). The six core technologies unveiled were: △Mobile Energy Storage System (ESS) Power Platform △Naepo Digital Twin △Autonomous Driving Robots Specialized for SMEs △Remote-Driving Valet Parking △Autonomous Driving Testbed △AI Computing Center.
< Image of the remote-controlled autonomous vehicle developed by Professor In-hee Kim >
The "Mobile Energy Storage System (ESS) Power Platform" is a technology led by Professor Lee Yoon-gu and co-developed with FutureEV Co., Ltd., ECOCAB Co., Ltd., Hanyang Electric Co., Ltd., and Uptech Co., Ltd. It's a solution that can establish a stable power grid in areas with difficult power supply, such as disaster sites or islands, proving its commercial potential in the eco-friendly power sector.
The "Naepo Digital Twin" was commercialized by a research team led by Senior Researcher Kim Tae-kyun in collaboration with Dochak Co., Ltd. It can simulate real-world city and traffic conditions in a 3D virtual environment for traffic monitoring, situation prediction, disaster response, and policy verification. It's gaining attention as a core technology for building smart cities.
The "Autonomous Driving Robots Specialized for SMEs" was developed by research teams led by Professors Kim Kyung-soo and Choi Geun-ha in collaboration with L-Line Co., Ltd. and Torrent Systems Co., Ltd. This autonomous logistics robot, optimized for the logistics environment of small and medium-sized enterprises, demonstrated precise movement and stacking of logistics racks inside a factory at the event, confirming the potential for innovation in the SME manufacturing sector.
The "Remote-Driving Valet Parking Technology" is being commercialized by Professor Kim In-hee in collaboration with Dochak Co., Ltd., Torrent Systems Co., Ltd., E-motion Co., Ltd., and the National Science and Technology Research Network KREONET (operated by the Korea Institute of Science and Technology Information). During the demonstration, a vehicle remotely controlled from Daejeon traveled to the Naepo Research Institute and completed parking at its destination, proving the stability and practicality of remote autonomous driving.
< Image of the KAIST Mobility Research Institute Technology Demonstration Day poster >
The "Autonomous Driving Testbed" is a platform built by Professors Ahn Hee-jin and Noh Min-kyun. It's an example of expanding research achievements in reduced-scale vehicle-based autonomous driving into a platform for education and industrial verification. The KAIST Mobility Research Institute plans to use this as a foundation for the "2025 KAIST Mobility Challenge Competition" next year to simultaneously foster next-generation talent and promote technology commercialization.
The "AI Computing Center" was unveiled by NOTA Co., Ltd., which is soon to be listed on KOSDAQ. The company introduced its RE100-based power system and AI optimization technology and presented its vision for collaboration with tenant companies, stating its goal to contribute to the expansion of the AI ecosystem.
Kitae Jang, Director of the KAIST Mobility Research Institute, stated, "This demonstration was an opportunity to show the concrete process of KAIST's research achievements being adopted by the industry." He added, "We will continue to lead the commercialization of future mobility and AI technologies and the development of local industries through close collaboration with local governments and companies."
KAIST President Kwang Hyung Lee emphasized, "KAIST's mission is to contribute to the nation and local communities through technological innovation. We find it meaningful to see our research achievements creating real change in the industry and will continue to lead global mobility innovation and the creation of new value through collaboration with companies and local governments."
2025.09.24 View 1916 -
 Professor Hyun Myung's Team Wins First Place in a Challenge at ICRA by IEEE
< Photo 1. (From left) Daebeom Kim (Team Leader, Ph.D. student), Seungjae Lee (Ph.D. student), Seoyeon Jang (Ph.D. student), Jei Kong (Master's student), Professor Hyun Myung >
A team of the Urban Robotics Lab, led by Professor Hyun Myung from the KAIST School of Electrical Engineering, achieved a remarkable first-place overall victory in the Nothing Stands Still Challenge (NSS Challenge) 2025, held at the 2025 IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious robotics conference, from May 19 to 23 in Atlanta, USA.
The NSS Challenge was co-hosted by HILTI, a global construction company based in Liechtenstein, and Stanford University's Gradient Spaces Group. It is an expanded version of the HILTI SLAM (Simultaneous Localization and Mapping)* Challenge, which has been held since 2021, and is considered one of the most prominent challenges at 2025 IEEE ICRA.*SLAM: Refers to Simultaneous Localization and Mapping, a technology where robots, drones, autonomous vehicles, etc., determine their own position and simultaneously create a map of their surroundings.
< Photo 2. A scene from the oral presentation on the winning team's technology (Speakers: Seungjae Lee and Seoyeon Jang, Ph.D. candidates of KAIST School of Electrical Engineering) >
This challenge primarily evaluates how accurately and robustly LiDAR scan data, collected at various times, can be registered in situations with frequent structural changes, such as construction and industrial environments. In particular, it is regarded as a highly technical competition because it deals with multi-session localization and mapping (Multi-session SLAM) technology that responds to structural changes occurring over multiple timeframes, rather than just single-point registration accuracy.
The Urban Robotics Lab team secured first place overall, surpassing National Taiwan University (3rd place) and Northwestern Polytechnical University of China (2nd place) by a significant margin, with their unique localization and mapping technology that solves the problem of registering LiDAR data collected across multiple times and spaces. The winning team will be awarded a prize of $4,000.
< Figure 1. Example of Multiway-Registration for Registering Multiple Scans >
The Urban Robotics Lab team independently developed a multiway-registration framework that can robustly register multiple scans even without prior connection information. This framework consists of an algorithm for summarizing feature points within scans and finding correspondences (CubicFeat), an algorithm for performing global registration based on the found correspondences (Quatro), and an algorithm for refining results based on change detection (Chamelion). This combination of technologies ensures stable registration performance based on fixed structures, even in highly dynamic industrial environments.
< Figure 2. Example of Change Detection Using the Chamelion Algorithm>
LiDAR scan registration technology is a core component of SLAM (Simultaneous Localization And Mapping) in various autonomous systems such as autonomous vehicles, autonomous robots, autonomous walking systems, and autonomous flying vehicles.
Professor Hyun Myung of the School of Electrical Engineering stated, "This award-winning technology is evaluated as a case that simultaneously proves both academic value and industrial applicability by maximizing the performance of precisely estimating the relative positions between different scans even in complex environments. I am grateful to the students who challenged themselves and never gave up, even when many teams abandoned due to the high difficulty."
< Figure 3. Competition Result Board, Lower RMSE (Root Mean Squared Error) Indicates Higher Score (Unit: meters)>
The Urban Robotics Lab team first participated in the SLAM Challenge in 2022, winning second place among academic teams, and in 2023, they secured first place overall in the LiDAR category and first place among academic teams in the vision category.
2025.05.30 View 13540
Professor Hyun Myung's Team Wins First Place in a Challenge at ICRA by IEEE
< Photo 1. (From left) Daebeom Kim (Team Leader, Ph.D. student), Seungjae Lee (Ph.D. student), Seoyeon Jang (Ph.D. student), Jei Kong (Master's student), Professor Hyun Myung >
A team of the Urban Robotics Lab, led by Professor Hyun Myung from the KAIST School of Electrical Engineering, achieved a remarkable first-place overall victory in the Nothing Stands Still Challenge (NSS Challenge) 2025, held at the 2025 IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious robotics conference, from May 19 to 23 in Atlanta, USA.
The NSS Challenge was co-hosted by HILTI, a global construction company based in Liechtenstein, and Stanford University's Gradient Spaces Group. It is an expanded version of the HILTI SLAM (Simultaneous Localization and Mapping)* Challenge, which has been held since 2021, and is considered one of the most prominent challenges at 2025 IEEE ICRA.*SLAM: Refers to Simultaneous Localization and Mapping, a technology where robots, drones, autonomous vehicles, etc., determine their own position and simultaneously create a map of their surroundings.
< Photo 2. A scene from the oral presentation on the winning team's technology (Speakers: Seungjae Lee and Seoyeon Jang, Ph.D. candidates of KAIST School of Electrical Engineering) >
This challenge primarily evaluates how accurately and robustly LiDAR scan data, collected at various times, can be registered in situations with frequent structural changes, such as construction and industrial environments. In particular, it is regarded as a highly technical competition because it deals with multi-session localization and mapping (Multi-session SLAM) technology that responds to structural changes occurring over multiple timeframes, rather than just single-point registration accuracy.
The Urban Robotics Lab team secured first place overall, surpassing National Taiwan University (3rd place) and Northwestern Polytechnical University of China (2nd place) by a significant margin, with their unique localization and mapping technology that solves the problem of registering LiDAR data collected across multiple times and spaces. The winning team will be awarded a prize of $4,000.
< Figure 1. Example of Multiway-Registration for Registering Multiple Scans >
The Urban Robotics Lab team independently developed a multiway-registration framework that can robustly register multiple scans even without prior connection information. This framework consists of an algorithm for summarizing feature points within scans and finding correspondences (CubicFeat), an algorithm for performing global registration based on the found correspondences (Quatro), and an algorithm for refining results based on change detection (Chamelion). This combination of technologies ensures stable registration performance based on fixed structures, even in highly dynamic industrial environments.
< Figure 2. Example of Change Detection Using the Chamelion Algorithm>
LiDAR scan registration technology is a core component of SLAM (Simultaneous Localization And Mapping) in various autonomous systems such as autonomous vehicles, autonomous robots, autonomous walking systems, and autonomous flying vehicles.
Professor Hyun Myung of the School of Electrical Engineering stated, "This award-winning technology is evaluated as a case that simultaneously proves both academic value and industrial applicability by maximizing the performance of precisely estimating the relative positions between different scans even in complex environments. I am grateful to the students who challenged themselves and never gave up, even when many teams abandoned due to the high difficulty."
< Figure 3. Competition Result Board, Lower RMSE (Root Mean Squared Error) Indicates Higher Score (Unit: meters)>
The Urban Robotics Lab team first participated in the SLAM Challenge in 2022, winning second place among academic teams, and in 2023, they secured first place overall in the LiDAR category and first place among academic teams in the vision category.
2025.05.30 View 13540 -
 KAIST to begin Joint Research to Develop Next-Generation LiDAR System with Hyundai Motor Group
< (From left) Jong-Soo Lee, Executive Vice President at Hyundai Motor, Sang-Yup Lee, Senior Vice President for Research at KAIST >
The ‘Hyundai Motor Group-KAIST On-Chip LiDAR Joint Research Lab’ was opened at KAIST’s main campus in Daejeon to develop LiDAR sensors for advanced autonomous vehicles.
The joint research lab aims to develop high-performance and compact on-chip sensors and new signal detection technology, which are essential in the increasingly competitive autonomous driving market. On-chip sensors, which utilize semiconductor manufacturing technology to add various functions, can reduce the size of LiDAR systems compared to conventional methods and secure price competitiveness through mass production using semiconductor fabrication processes.
The joint research lab will consist of about 30 researchers, including the Hyundai-Kia Institute of Advanced Technology Development research team and KAIST professors Sanghyeon Kim, Sangsik Kim, Wanyeong Jung, and Hamza Kurt from KAIST’s School of Electrical Engineering, and will operate for four years until 2028.
KAIST will be leading the specialized work of each research team, such as for the development of silicon optoelectronic on-chip LiDAR components, the fabrication of high-speed, high-power integrated circuits to run the LiDAR systems, and the optimization and verification of LiDAR systems.
Hyundai Motor and Kia, together with Hyundai NGV, a specialized industry-academia cooperation institution, will oversee the operation of the joint research lab and provide support such as monitoring technological trends, suggesting research directions, deriving core ideas, and recommending technologies and experts to enhance research capabilities.
A Hyundai Motor Group official said, "We believe that this cooperation between Hyundai Motor Company and Kia, the leader in autonomous driving technology, and KAIST, the home of world-class technology, will hasten the achievement of fully autonomous driving." He added, "We will do our best to enable the lab to produce tangible results.”
Professor Sanghyeon Kim said, "The LiDAR sensor, which serves as the eyes of a car, is a core technology for future autonomous vehicle development that is essential for automobile companies to internalize."
2024.02.27 View 19079
KAIST to begin Joint Research to Develop Next-Generation LiDAR System with Hyundai Motor Group
< (From left) Jong-Soo Lee, Executive Vice President at Hyundai Motor, Sang-Yup Lee, Senior Vice President for Research at KAIST >
The ‘Hyundai Motor Group-KAIST On-Chip LiDAR Joint Research Lab’ was opened at KAIST’s main campus in Daejeon to develop LiDAR sensors for advanced autonomous vehicles.
The joint research lab aims to develop high-performance and compact on-chip sensors and new signal detection technology, which are essential in the increasingly competitive autonomous driving market. On-chip sensors, which utilize semiconductor manufacturing technology to add various functions, can reduce the size of LiDAR systems compared to conventional methods and secure price competitiveness through mass production using semiconductor fabrication processes.
The joint research lab will consist of about 30 researchers, including the Hyundai-Kia Institute of Advanced Technology Development research team and KAIST professors Sanghyeon Kim, Sangsik Kim, Wanyeong Jung, and Hamza Kurt from KAIST’s School of Electrical Engineering, and will operate for four years until 2028.
KAIST will be leading the specialized work of each research team, such as for the development of silicon optoelectronic on-chip LiDAR components, the fabrication of high-speed, high-power integrated circuits to run the LiDAR systems, and the optimization and verification of LiDAR systems.
Hyundai Motor and Kia, together with Hyundai NGV, a specialized industry-academia cooperation institution, will oversee the operation of the joint research lab and provide support such as monitoring technological trends, suggesting research directions, deriving core ideas, and recommending technologies and experts to enhance research capabilities.
A Hyundai Motor Group official said, "We believe that this cooperation between Hyundai Motor Company and Kia, the leader in autonomous driving technology, and KAIST, the home of world-class technology, will hasten the achievement of fully autonomous driving." He added, "We will do our best to enable the lab to produce tangible results.”
Professor Sanghyeon Kim said, "The LiDAR sensor, which serves as the eyes of a car, is a core technology for future autonomous vehicle development that is essential for automobile companies to internalize."
2024.02.27 View 19079 -
 KAIST to showcase a pack of KAIST Start-ups at CES 2023
- KAIST is to run an Exclusive Booth at the Venetian Expo (Hall G) in Eureka Park, at CES 2023, to be held in Las Vegas from Thursday, January 5th through Sunday, the 8th.
- Twelve businesses recently put together by KAIST faculty, alumni, and the start-ups given legal usage of KAIST technologies will be showcased.
- Out of the participating start-ups, the products by Fluiz and Hills Robotics were selected as the “CES Innovation Award 2023 Honoree”, scoring top in their respective categories.
On January 3, KAIST announced that there will be a KAIST booth at Consumer Electronics Show (CES) 2023, the most influential tech event in the world, to be held in Las Vegas from January 3 to 8.
At this exclusive corner, KAIST will introduce the technologies of KAIST start-ups over the exhibition period.
KAIST first started holding its exclusive booth in CES 2019 with five start-up businesses, following up at CES 2020 with 12 start-ups and at CES 2022 with 10 start-ups. At CES 2023, which would be KAIST’s fourth conference, KAIST will be accompanying 12 businesses including start-ups by the faculty members, alumni, and technology transfer companies that just began their businesses with technologies from their research findings that stands a head above others.
To maximize the publicity opportunity, KAIST will support each company’s marketing strategies through cooperation with the Korea International Trade Association (KITA), and provide an opportunity for the school and each startup to create global identity and exhibit the excellence of their technologies at the convention.
The following companies will be at the KAIST Booth in Eureka Park:
The twelve startups mentioned above aim to achieve global technology commecialization in their respective fields of expertise spanning from eXtended Reality (XR) and gaming, to AI and robotics, vehicle and transport, mobile platform, smart city, autonomous driving, healthcare, internet of thing (IoT), through joint research and development, technology transfer and investment attraction from world’s leading institutions and enterprises.
In particular, Fluiz and Hills Robotics won the CES Innovation Award as 2023 Honorees and is expected to attain greater achievements in the future.
A staff member from the KAIST Institute of Technology Value Creation said, “The KAIST Showcase for CES 2023 has prepared a new pitching space for each of the companies for their own IR efforts, and we hope that KAIST startups will actively and effectively market their products and technologies while they are at the convention. We hope it will help them utilize their time here to establish their name in presence here which will eventually serve as a good foothold for them and their predecessors to further global commercialization goals.”
2023.01.04 View 29312
KAIST to showcase a pack of KAIST Start-ups at CES 2023
- KAIST is to run an Exclusive Booth at the Venetian Expo (Hall G) in Eureka Park, at CES 2023, to be held in Las Vegas from Thursday, January 5th through Sunday, the 8th.
- Twelve businesses recently put together by KAIST faculty, alumni, and the start-ups given legal usage of KAIST technologies will be showcased.
- Out of the participating start-ups, the products by Fluiz and Hills Robotics were selected as the “CES Innovation Award 2023 Honoree”, scoring top in their respective categories.
On January 3, KAIST announced that there will be a KAIST booth at Consumer Electronics Show (CES) 2023, the most influential tech event in the world, to be held in Las Vegas from January 3 to 8.
At this exclusive corner, KAIST will introduce the technologies of KAIST start-ups over the exhibition period.
KAIST first started holding its exclusive booth in CES 2019 with five start-up businesses, following up at CES 2020 with 12 start-ups and at CES 2022 with 10 start-ups. At CES 2023, which would be KAIST’s fourth conference, KAIST will be accompanying 12 businesses including start-ups by the faculty members, alumni, and technology transfer companies that just began their businesses with technologies from their research findings that stands a head above others.
To maximize the publicity opportunity, KAIST will support each company’s marketing strategies through cooperation with the Korea International Trade Association (KITA), and provide an opportunity for the school and each startup to create global identity and exhibit the excellence of their technologies at the convention.
The following companies will be at the KAIST Booth in Eureka Park:
The twelve startups mentioned above aim to achieve global technology commecialization in their respective fields of expertise spanning from eXtended Reality (XR) and gaming, to AI and robotics, vehicle and transport, mobile platform, smart city, autonomous driving, healthcare, internet of thing (IoT), through joint research and development, technology transfer and investment attraction from world’s leading institutions and enterprises.
In particular, Fluiz and Hills Robotics won the CES Innovation Award as 2023 Honorees and is expected to attain greater achievements in the future.
A staff member from the KAIST Institute of Technology Value Creation said, “The KAIST Showcase for CES 2023 has prepared a new pitching space for each of the companies for their own IR efforts, and we hope that KAIST startups will actively and effectively market their products and technologies while they are at the convention. We hope it will help them utilize their time here to establish their name in presence here which will eventually serve as a good foothold for them and their predecessors to further global commercialization goals.”
2023.01.04 View 29312 -
 Team KAIST Makes Its Presence Felt in the Self-Driving Tech Industry
Team KAIST finishes 4th at the inaugural CES Autonomous Racing Competition
Team KAIST led by Professor Hyunchul Shim and Unmanned Systems Research Group (USRG) placed fourth in an autonomous race car competition in Las Vegas last week, making its presence felt in the self-driving automotive tech industry.
Team KAIST, beat its first competitor, Auburn University, with speeds of up to 131 mph at the Autonomous Challenge at CES held at the Las Vegas Motor Speedway. However, the team failed to advance to the final round when it lost to PoliMOVE, comprised of the Polytechnic University of Milan and the University of Alabama, the final winner of the $150,000 USD race.
A total of eight teams competed in the self-driving race. The race was conducted as a single elimination tournament consisting of multiple rounds of matches. Two cars took turns playing the role of defender and attacker, and each car attempted to outpace the other until one of them was unable to complete the mission.
Each team designed the algorithm to control its racecar, the Dallara-built AV-21, which can reach a speed of up to 173 mph, and make it safely drive around the track at high speeds without crashing into the other.
The event is the CES version of the Indy Autonomous Challenge, a competition that took place for the first time in October last year to encourage university students from around the world to develop complicated software for autonomous driving and advance relevant technologies. Team KAIST placed 4th at the Indy Autonomous Challenge, which qualified it to participate in this race.
“The technical level of the CES race is much higher than last October’s and we had a very tough race. We advanced to the semifinals for two consecutive races. I think our autonomous vehicle technology is proving itself to the world,” said Professor Shim.
Professor Shim’s research group has been working on the development of autonomous aerial and ground vehicles for the past 12 years. A self-driving car developed by the lab was certified by the South Korean government to run on public roads.
The vehicle the team used cost more than 1 million USD to build. Many of the other teams had to repair their vehicle more than once due to accidents and had to spend a lot on repairs. “We are the only one who did not have any accidents, and this is a testament to our technological prowess,” said Professor Shim.
He said the financial funding to purchase pricy parts and equipment for the racecar is always a challenge given the very tight research budget and absence of corporate sponsorships.
However, Professor Shim and his research group plan to participate in the next race in September and in the 2023 CES race.
“I think we need more systemic and proactive research and support systems to earn better results but there is nothing better than the group of passionate students who are taking part in this project with us,” Shim added.
2022.01.12 View 17650
Team KAIST Makes Its Presence Felt in the Self-Driving Tech Industry
Team KAIST finishes 4th at the inaugural CES Autonomous Racing Competition
Team KAIST led by Professor Hyunchul Shim and Unmanned Systems Research Group (USRG) placed fourth in an autonomous race car competition in Las Vegas last week, making its presence felt in the self-driving automotive tech industry.
Team KAIST, beat its first competitor, Auburn University, with speeds of up to 131 mph at the Autonomous Challenge at CES held at the Las Vegas Motor Speedway. However, the team failed to advance to the final round when it lost to PoliMOVE, comprised of the Polytechnic University of Milan and the University of Alabama, the final winner of the $150,000 USD race.
A total of eight teams competed in the self-driving race. The race was conducted as a single elimination tournament consisting of multiple rounds of matches. Two cars took turns playing the role of defender and attacker, and each car attempted to outpace the other until one of them was unable to complete the mission.
Each team designed the algorithm to control its racecar, the Dallara-built AV-21, which can reach a speed of up to 173 mph, and make it safely drive around the track at high speeds without crashing into the other.
The event is the CES version of the Indy Autonomous Challenge, a competition that took place for the first time in October last year to encourage university students from around the world to develop complicated software for autonomous driving and advance relevant technologies. Team KAIST placed 4th at the Indy Autonomous Challenge, which qualified it to participate in this race.
“The technical level of the CES race is much higher than last October’s and we had a very tough race. We advanced to the semifinals for two consecutive races. I think our autonomous vehicle technology is proving itself to the world,” said Professor Shim.
Professor Shim’s research group has been working on the development of autonomous aerial and ground vehicles for the past 12 years. A self-driving car developed by the lab was certified by the South Korean government to run on public roads.
The vehicle the team used cost more than 1 million USD to build. Many of the other teams had to repair their vehicle more than once due to accidents and had to spend a lot on repairs. “We are the only one who did not have any accidents, and this is a testament to our technological prowess,” said Professor Shim.
He said the financial funding to purchase pricy parts and equipment for the racecar is always a challenge given the very tight research budget and absence of corporate sponsorships.
However, Professor Shim and his research group plan to participate in the next race in September and in the 2023 CES race.
“I think we need more systemic and proactive research and support systems to earn better results but there is nothing better than the group of passionate students who are taking part in this project with us,” Shim added.
2022.01.12 View 17650 -
 Team KAIST to Race at CES 2022 Autonomous Challenge
Five top university autonomous racing teams will compete in a head-to-head passing competition in Las Vegas
A self-driving racing team from the KAIST Unmanned System Research Group (USRG) advised by Professor Hyunchul Shim will compete at the Autonomous Challenge at the Consumer Electronic Show (CES) on January 7, 2022. The head-to-head, high speed autonomous racecar passing competition at the Las Vegas Motor Speedway will feature the finalists and semifinalists from the Indy Autonomous Challenge in October of this year. Team KAIST qualified as a semifinalist at the Indy Autonomous Challenge and will join four other university teams including the winner of the competition, Technische Universität München.
Team KAIST’s AV-21 vehicle is capable of driving on its own at more than 200km/h will be expected to show a speed of more than 300 km/h at the race.The participating teams are:1. KAIST2. EuroRacing : University of Modena and Reggio Emilia (Italy), University of Pisa (Italy), ETH Zürich (Switzerland), Polish Academy of Sciences (Poland) 3. MIT-PITT-RW, Massachusetts Institute of Technology, University of Pittsburgh, Rochester Institute of Technology, University of Waterloo (Canada)4.PoliMOVE – Politecnico di Milano (Italy), University of Alabama 5.TUM Autonomous Motorsport – Technische Universität München (Germany)
Professor Shim’s team is dedicated to the development and validation of cutting edge technologies for highly autonomous vehicles. In recognition of his pioneering research in unmanned system technologies, Professor Shim was honored with the Grand Prize of the Minister of Science and ICT on December 9.
“We began autonomous vehicle research in 2009 when we signed up for Hyundai Motor Company’s Autonomous Driving Challenge. For this, we developed a complete set of in-house technologies such as low-level vehicle control, perception, localization, and decision making.” In 2019, the team came in third place in the Challenge and they finally won this year.
For years, his team has participated in many unmanned systems challenges at home and abroad, gaining recognition around the world. The team won the inaugural 2016 IROS autonomous drone racing and placed second in the 2018 IROS Autonomous Drone Racing Competition. They also competed in 2017 MBZIRC, ranking fourth in Missions 2 and 3, and fifth in the Grand Challenge.
Most recently, the team won the first round of Lockheed Martin’s Alpha Pilot AI Drone Innovation Challenge. The team is now participating in the DARPA Subterranean Challenge as a member of Team CoSTAR with NASA JPL, MIT, and Caltech.
“We have accumulated plenty of first-hand experience developing autonomous vehicles with the support of domestic companies such as Hyundai Motor Company, Samsung, LG, and NAVER. In 2017, the autonomous vehicle platform “EureCar” that we developed in-house was authorized by the Korean government to lawfully conduct autonomous driving experiment on public roads,” said Professor Shim.
The team has developed various key technologies and algorithms related to unmanned systems that can be categorized into three major components: perception, planning, and control. Considering the characteristics of the algorithms that make up each module, their technology operates using a distributed computing system.
Since 2015, the team has been actively using deep learning algorithms in the form of perception subsystems. Contextual information extracted from multi-modal sensory data gathered via cameras, lidar, radar, GPS, IMU, etc. is forwarded to the planning subsystem. The planning module is responsible for the decision making and planning required for autonomous driving such as lane change determination and trajectory planning, emergency stops, and velocity command generation. The results from the planner are fed into the controller to follow the planned high-level command. The team has also developed and verified the possibility of an end-to-end deep learning based autonomous driving approach that replaces a complex system with one single AI network.
2021.12.17 View 18409
Team KAIST to Race at CES 2022 Autonomous Challenge
Five top university autonomous racing teams will compete in a head-to-head passing competition in Las Vegas
A self-driving racing team from the KAIST Unmanned System Research Group (USRG) advised by Professor Hyunchul Shim will compete at the Autonomous Challenge at the Consumer Electronic Show (CES) on January 7, 2022. The head-to-head, high speed autonomous racecar passing competition at the Las Vegas Motor Speedway will feature the finalists and semifinalists from the Indy Autonomous Challenge in October of this year. Team KAIST qualified as a semifinalist at the Indy Autonomous Challenge and will join four other university teams including the winner of the competition, Technische Universität München.
Team KAIST’s AV-21 vehicle is capable of driving on its own at more than 200km/h will be expected to show a speed of more than 300 km/h at the race.The participating teams are:1. KAIST2. EuroRacing : University of Modena and Reggio Emilia (Italy), University of Pisa (Italy), ETH Zürich (Switzerland), Polish Academy of Sciences (Poland) 3. MIT-PITT-RW, Massachusetts Institute of Technology, University of Pittsburgh, Rochester Institute of Technology, University of Waterloo (Canada)4.PoliMOVE – Politecnico di Milano (Italy), University of Alabama 5.TUM Autonomous Motorsport – Technische Universität München (Germany)
Professor Shim’s team is dedicated to the development and validation of cutting edge technologies for highly autonomous vehicles. In recognition of his pioneering research in unmanned system technologies, Professor Shim was honored with the Grand Prize of the Minister of Science and ICT on December 9.
“We began autonomous vehicle research in 2009 when we signed up for Hyundai Motor Company’s Autonomous Driving Challenge. For this, we developed a complete set of in-house technologies such as low-level vehicle control, perception, localization, and decision making.” In 2019, the team came in third place in the Challenge and they finally won this year.
For years, his team has participated in many unmanned systems challenges at home and abroad, gaining recognition around the world. The team won the inaugural 2016 IROS autonomous drone racing and placed second in the 2018 IROS Autonomous Drone Racing Competition. They also competed in 2017 MBZIRC, ranking fourth in Missions 2 and 3, and fifth in the Grand Challenge.
Most recently, the team won the first round of Lockheed Martin’s Alpha Pilot AI Drone Innovation Challenge. The team is now participating in the DARPA Subterranean Challenge as a member of Team CoSTAR with NASA JPL, MIT, and Caltech.
“We have accumulated plenty of first-hand experience developing autonomous vehicles with the support of domestic companies such as Hyundai Motor Company, Samsung, LG, and NAVER. In 2017, the autonomous vehicle platform “EureCar” that we developed in-house was authorized by the Korean government to lawfully conduct autonomous driving experiment on public roads,” said Professor Shim.
The team has developed various key technologies and algorithms related to unmanned systems that can be categorized into three major components: perception, planning, and control. Considering the characteristics of the algorithms that make up each module, their technology operates using a distributed computing system.
Since 2015, the team has been actively using deep learning algorithms in the form of perception subsystems. Contextual information extracted from multi-modal sensory data gathered via cameras, lidar, radar, GPS, IMU, etc. is forwarded to the planning subsystem. The planning module is responsible for the decision making and planning required for autonomous driving such as lane change determination and trajectory planning, emergency stops, and velocity command generation. The results from the planner are fed into the controller to follow the planned high-level command. The team has also developed and verified the possibility of an end-to-end deep learning based autonomous driving approach that replaces a complex system with one single AI network.
2021.12.17 View 18409 -
 KI-Robotics Wins the 2021 Hyundai Motor Autonomous Driving Challenge
Professor Hyunchul Shim’s autonomous driving team topped the challenge
KI-Robotics, a KAIST autonomous driving research team led by Professor Hyunchul Shim from the School of Electric Engineering won the 2021 Hyundai Motor Autonomous Driving Challenge held in Seoul on November 29. The KI-Robotics team received 100 million won in prize money and a field trip to the US.
Out of total 23 teams, the six teams competed in the finals by simultaneously driving through a 4km section within the test operation region, where other traffic was constrained. The challenge included avoiding and overtaking vehicles, crossing intersections, and keeping to traffic laws including traffic lights, lanes, speed limit, and school zones. The contestants were ranked by their order of course completion, but points were deducted every time they violated a traffic rule. A driver and an invigilator rode in each car in case of an emergency, and the race was broadcasted live on a large screen on stage and via YouTube.
In the first round, KI-Robotics came in first with a score of 11 minutes and 27 seconds after a tight race with Incheon University. Although the team’s result in the second round exceeded 16 minutes due to traffic conditions like traffic lights, the 11 minutes and 27 seconds ultimately ranked first out of the six universities. It is worth noting that KI-Robotics focused on its vehicle’s perception and judgement rather than speed when building its algorithm. Out of the six universities that made it to the final round, KI-Robotics was the only team that excluded GPS from the vehicle to minimize its risk.
The team considered the fact that GPS signals are not accurate in urban settings, meaning location errors can cause problems while driving. As an alternative, the team added three radar sensors and cameras in the front and the back of the vehicle. They also used the urban-specific SLAM technology they developed to construct a precise map and were more successful in location determination.
As opposed to other teams that focused on speed, the KAIST team also developed overtaking route construction technology, taking into consideration the locations of surrounding cars, which gave them an advantage in responding to obstacles while keeping to real urban traffic rules. Through this, the KAIST team could score highest in rounds one and two combined.
Professor Shim said, “I am very glad that the autonomous driving technology our research team has been developing over the last ten years has borne fruit. I would like to thank the leader, Daegyu Lee, and all the students that participated in the development, as they did more than their best under difficult conditions.”
Dae-Gyu Lee, the leader of KI-Robotics and a Ph.D. candidate in the School of Electrical Engineering, explained, “Since we came in fourth in the preliminary round, we were further behind than we expected. But we were able to overtake the cars ahead of us and shorten our record.”
2021.12.07 View 10990
KI-Robotics Wins the 2021 Hyundai Motor Autonomous Driving Challenge
Professor Hyunchul Shim’s autonomous driving team topped the challenge
KI-Robotics, a KAIST autonomous driving research team led by Professor Hyunchul Shim from the School of Electric Engineering won the 2021 Hyundai Motor Autonomous Driving Challenge held in Seoul on November 29. The KI-Robotics team received 100 million won in prize money and a field trip to the US.
Out of total 23 teams, the six teams competed in the finals by simultaneously driving through a 4km section within the test operation region, where other traffic was constrained. The challenge included avoiding and overtaking vehicles, crossing intersections, and keeping to traffic laws including traffic lights, lanes, speed limit, and school zones. The contestants were ranked by their order of course completion, but points were deducted every time they violated a traffic rule. A driver and an invigilator rode in each car in case of an emergency, and the race was broadcasted live on a large screen on stage and via YouTube.
In the first round, KI-Robotics came in first with a score of 11 minutes and 27 seconds after a tight race with Incheon University. Although the team’s result in the second round exceeded 16 minutes due to traffic conditions like traffic lights, the 11 minutes and 27 seconds ultimately ranked first out of the six universities. It is worth noting that KI-Robotics focused on its vehicle’s perception and judgement rather than speed when building its algorithm. Out of the six universities that made it to the final round, KI-Robotics was the only team that excluded GPS from the vehicle to minimize its risk.
The team considered the fact that GPS signals are not accurate in urban settings, meaning location errors can cause problems while driving. As an alternative, the team added three radar sensors and cameras in the front and the back of the vehicle. They also used the urban-specific SLAM technology they developed to construct a precise map and were more successful in location determination.
As opposed to other teams that focused on speed, the KAIST team also developed overtaking route construction technology, taking into consideration the locations of surrounding cars, which gave them an advantage in responding to obstacles while keeping to real urban traffic rules. Through this, the KAIST team could score highest in rounds one and two combined.
Professor Shim said, “I am very glad that the autonomous driving technology our research team has been developing over the last ten years has borne fruit. I would like to thank the leader, Daegyu Lee, and all the students that participated in the development, as they did more than their best under difficult conditions.”
Dae-Gyu Lee, the leader of KI-Robotics and a Ph.D. candidate in the School of Electrical Engineering, explained, “Since we came in fourth in the preliminary round, we were further behind than we expected. But we were able to overtake the cars ahead of us and shorten our record.”
2021.12.07 View 10990 -
 A System Controlling Road Active Noise to Hit the Road
The research team led by Professor Youngjin Park of the Department of Mechanical Engineering has developed a road noise active noise control (RANC) system to be commercialized in partnership with Hyundai Motor Group.
On December 11, Hyundai Motor Group announced the successful development of the RANC system, which significantly reduces the road noise flowing into cars. The carmaker has completed the domestic and American patent applications for the location of sensors and the signal selection method, the core technology of RANC.
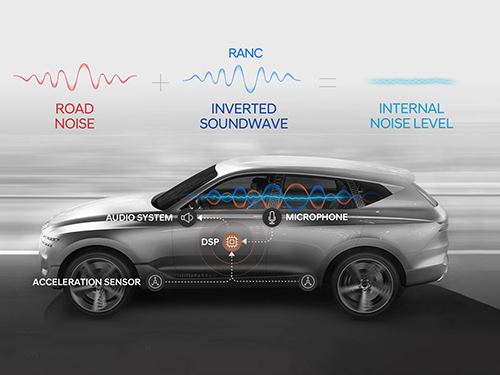
RANC is a technology for reducing road noise during driving. This system consists of an acceleration sensor, digital signal processor (the control computer to analyze sound signals), microphone, amplifier, and audio system. To make the system as simple as possible, the audio system utilizes the original audio system embedded in the car instead of a separate system.
The acceleration sensor first calculates the vibration from the road into the car. The location of the sensor is important for accurately identifying the vibration path. The research team was able to find the optimal sensor location through a number of tests.
The System Dynamics and Applied Control Laboratory of Professor Park researched ways to significantly reduce road noise with Hyundai Motor Group for four years from 1993 as a G7 national project and published the results in international journals. In 2002, the researchers published an article titled “Noise Quietens Driving” in Nature, where they announced the first success in reducing road noise in actual cars. The achievement did not lead to commercialization, however, due to the lack of auxiliary technologies at the time, digital amplifiers and DSP for cars for example, and pricing issues.
Since 2013, Professor Park’s research team has participated in one technology transfer and eight university-industry projects. Based on these efforts, the team was able to successfully develop the RANC system with domestic technology in partnership with Hyundai’s NVH Research Lab (Research Fellow, Dr. Gangdeok Lee; Ph.D. in aviation engineering, 1996), Optomech (Founder, Professor Gyeongsu Kim; Ph.D. in mechanical engineering, 1999), ARE (CEO Hyeonseok Kim; Ph.D. in mechanical engineering, 1998), WeAcom, and BurnYoung.
Professor Park’s team led the project by performing theory-based research during the commercialization stage in collaboration with Hyundai Motor Group.
For the commercialization of the RANC system, Hyundai Motor Group is planning to collaborate with the global car audio company Harman to increase the degree of completion and apply the RANC system to the GV 80, the first SUV model of the Genesis brand.
“I am very delighted as an engineer to see the research I worked on from my early days at KAIST be commercialized after 20 years,” noted Professor Park. “I am thrilled to make a contribution to such commercialization with my students in my lab.”
2019.12.27 View 18560
A System Controlling Road Active Noise to Hit the Road
The research team led by Professor Youngjin Park of the Department of Mechanical Engineering has developed a road noise active noise control (RANC) system to be commercialized in partnership with Hyundai Motor Group.
On December 11, Hyundai Motor Group announced the successful development of the RANC system, which significantly reduces the road noise flowing into cars. The carmaker has completed the domestic and American patent applications for the location of sensors and the signal selection method, the core technology of RANC.
RANC is a technology for reducing road noise during driving. This system consists of an acceleration sensor, digital signal processor (the control computer to analyze sound signals), microphone, amplifier, and audio system. To make the system as simple as possible, the audio system utilizes the original audio system embedded in the car instead of a separate system.
The acceleration sensor first calculates the vibration from the road into the car. The location of the sensor is important for accurately identifying the vibration path. The research team was able to find the optimal sensor location through a number of tests.
The System Dynamics and Applied Control Laboratory of Professor Park researched ways to significantly reduce road noise with Hyundai Motor Group for four years from 1993 as a G7 national project and published the results in international journals. In 2002, the researchers published an article titled “Noise Quietens Driving” in Nature, where they announced the first success in reducing road noise in actual cars. The achievement did not lead to commercialization, however, due to the lack of auxiliary technologies at the time, digital amplifiers and DSP for cars for example, and pricing issues.
Since 2013, Professor Park’s research team has participated in one technology transfer and eight university-industry projects. Based on these efforts, the team was able to successfully develop the RANC system with domestic technology in partnership with Hyundai’s NVH Research Lab (Research Fellow, Dr. Gangdeok Lee; Ph.D. in aviation engineering, 1996), Optomech (Founder, Professor Gyeongsu Kim; Ph.D. in mechanical engineering, 1999), ARE (CEO Hyeonseok Kim; Ph.D. in mechanical engineering, 1998), WeAcom, and BurnYoung.
Professor Park’s team led the project by performing theory-based research during the commercialization stage in collaboration with Hyundai Motor Group.
For the commercialization of the RANC system, Hyundai Motor Group is planning to collaborate with the global car audio company Harman to increase the degree of completion and apply the RANC system to the GV 80, the first SUV model of the Genesis brand.
“I am very delighted as an engineer to see the research I worked on from my early days at KAIST be commercialized after 20 years,” noted Professor Park. “I am thrilled to make a contribution to such commercialization with my students in my lab.”
2019.12.27 View 18560 -
 AI to Determine When to Intervene with Your Driving
(Professor Uichin Lee (left) and PhD candidate Auk Kim)
Can your AI agent judge when to talk to you while you are driving? According to a KAIST research team, their in-vehicle conservation service technology will judge when it is appropriate to contact you to ensure your safety.
Professor Uichin Lee from the Department of Industrial and Systems Engineering at KAIST and his research team have developed AI technology that automatically detects safe moments for AI agents to provide conversation services to drivers.
Their research focuses on solving the potential problems of distraction created by in-vehicle conversation services. If an AI agent talks to a driver at an inopportune moment, such as while making a turn, a car accident will be more likely to occur.
In-vehicle conversation services need to be convenient as well as safe. However, the cognitive burden of multitasking negatively influences the quality of the service. Users tend to be more distracted during certain traffic conditions. To address this long-standing challenge of the in-vehicle conversation services, the team introduced a composite cognitive model that considers both safe driving and auditory-verbal service performance and used a machine-learning model for all collected data.
The combination of these individual measures is able to determine the appropriate moments for conversation and most appropriate types of conversational services. For instance, in the case of delivering simple-context information, such as a weather forecast, driver safety alone would be the most appropriate consideration. Meanwhile, when delivering information that requires a driver response, such as a “Yes” or “No,” the combination of driver safety and auditory-verbal performance should be considered.
The research team developed a prototype of an in-vehicle conversation service based on a navigation app that can be used in real driving environments. The app was also connected to the vehicle to collect in-vehicle OBD-II/CAN data, such as the steering wheel angle and brake pedal position, and mobility and environmental data such as the distance between successive cars and traffic flow.
Using pseudo-conversation services, the research team collected a real-world driving dataset consisting of 1,388 interactions and sensor data from 29 drivers who interacted with AI conversational agents. Machine learning analysis based on the dataset demonstrated that the opportune moments for driver interruption could be correctly inferred with 87% accuracy.
The safety enhancement technology developed by the team is expected to minimize driver distractions caused by in-vehicle conversation services. This technology can be directly applied to current in-vehicle systems that provide conversation services. It can also be extended and applied to the real-time detection of driver distraction problems caused by the use of a smartphone while driving.
Professor Lee said, “In the near future, cars will proactively deliver various in-vehicle conversation services. This technology will certainly help vehicles interact with their drivers safely as it can fairly accurately determine when to provide conversation services using only basic sensor data generated by cars.”
The researchers presented their findings at the ACM International Joint Conference on Pervasive and Ubiquitous Computing (Ubicomp’19) in London, UK. This research was supported in part by Hyundai NGV and by the Next-Generation Information Computing Development Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT.
(Figure: Visual description of safe enhancement technology for in-vehicle conversation services)
2019.11.13 View 26328
AI to Determine When to Intervene with Your Driving
(Professor Uichin Lee (left) and PhD candidate Auk Kim)
Can your AI agent judge when to talk to you while you are driving? According to a KAIST research team, their in-vehicle conservation service technology will judge when it is appropriate to contact you to ensure your safety.
Professor Uichin Lee from the Department of Industrial and Systems Engineering at KAIST and his research team have developed AI technology that automatically detects safe moments for AI agents to provide conversation services to drivers.
Their research focuses on solving the potential problems of distraction created by in-vehicle conversation services. If an AI agent talks to a driver at an inopportune moment, such as while making a turn, a car accident will be more likely to occur.
In-vehicle conversation services need to be convenient as well as safe. However, the cognitive burden of multitasking negatively influences the quality of the service. Users tend to be more distracted during certain traffic conditions. To address this long-standing challenge of the in-vehicle conversation services, the team introduced a composite cognitive model that considers both safe driving and auditory-verbal service performance and used a machine-learning model for all collected data.
The combination of these individual measures is able to determine the appropriate moments for conversation and most appropriate types of conversational services. For instance, in the case of delivering simple-context information, such as a weather forecast, driver safety alone would be the most appropriate consideration. Meanwhile, when delivering information that requires a driver response, such as a “Yes” or “No,” the combination of driver safety and auditory-verbal performance should be considered.
The research team developed a prototype of an in-vehicle conversation service based on a navigation app that can be used in real driving environments. The app was also connected to the vehicle to collect in-vehicle OBD-II/CAN data, such as the steering wheel angle and brake pedal position, and mobility and environmental data such as the distance between successive cars and traffic flow.
Using pseudo-conversation services, the research team collected a real-world driving dataset consisting of 1,388 interactions and sensor data from 29 drivers who interacted with AI conversational agents. Machine learning analysis based on the dataset demonstrated that the opportune moments for driver interruption could be correctly inferred with 87% accuracy.
The safety enhancement technology developed by the team is expected to minimize driver distractions caused by in-vehicle conversation services. This technology can be directly applied to current in-vehicle systems that provide conversation services. It can also be extended and applied to the real-time detection of driver distraction problems caused by the use of a smartphone while driving.
Professor Lee said, “In the near future, cars will proactively deliver various in-vehicle conversation services. This technology will certainly help vehicles interact with their drivers safely as it can fairly accurately determine when to provide conversation services using only basic sensor data generated by cars.”
The researchers presented their findings at the ACM International Joint Conference on Pervasive and Ubiquitous Computing (Ubicomp’19) in London, UK. This research was supported in part by Hyundai NGV and by the Next-Generation Information Computing Development Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT.
(Figure: Visual description of safe enhancement technology for in-vehicle conversation services)
2019.11.13 View 26328 -
 KAIST Partners with Technion and Hyundai Motors for Future Mobility Technology Development
(KAIST Associate Vice President of Research Joung-Ho Kim(third from left) poses with Technion President Pereta Lavie and CTO Tae Won Im of Hyundai Motors)
KAIST has partnered with the Israel Institute of Technology, Technion, and Hyundai Motors to take the lead in the field of future mobility technologies. The three parties signed a consortium of global alliance for future mobility partnership at Technion on Sept. 5. KAIST Associate Vice President of Research Kim Joung-Ho, Hyundai Motor’s Central Advanced Research and Engineering CTO Tae Won Lim, and Technion President Peretz Lavie signed the MOU.
The three parties agreed to conduct joint research on hi-tech mobility areas including self-driving systems, cyber security, and AI in mobility. With the signing of the consortium, KAIST's technology in AI, semiconductors, and autonomous cars will produce synergy with Technion’s connected car solutions, advancing Hyundai Motor's competitiveness in the future mobility market.
In addition to the consortium, the three parties will set-up a startup consulting committee, which will provide consulting services for nurturing venture startups with creative ideas and outstanding technological prowess in their host countries.
2017.09.07 View 10032
KAIST Partners with Technion and Hyundai Motors for Future Mobility Technology Development
(KAIST Associate Vice President of Research Joung-Ho Kim(third from left) poses with Technion President Pereta Lavie and CTO Tae Won Im of Hyundai Motors)
KAIST has partnered with the Israel Institute of Technology, Technion, and Hyundai Motors to take the lead in the field of future mobility technologies. The three parties signed a consortium of global alliance for future mobility partnership at Technion on Sept. 5. KAIST Associate Vice President of Research Kim Joung-Ho, Hyundai Motor’s Central Advanced Research and Engineering CTO Tae Won Lim, and Technion President Peretz Lavie signed the MOU.
The three parties agreed to conduct joint research on hi-tech mobility areas including self-driving systems, cyber security, and AI in mobility. With the signing of the consortium, KAIST's technology in AI, semiconductors, and autonomous cars will produce synergy with Technion’s connected car solutions, advancing Hyundai Motor's competitiveness in the future mobility market.
In addition to the consortium, the three parties will set-up a startup consulting committee, which will provide consulting services for nurturing venture startups with creative ideas and outstanding technological prowess in their host countries.
2017.09.07 View 10032 -
 KAIST wins second place in unmanned boat competition
KAIST took second place in an international competition to promote technologies of the autonomous underwater vehicle (AUV).
Professor Jin-hwan Kim’s research team from KAIST’s Ocean Systems Engineering Department won the second place in Maritime RobotX Challenge which took place for the first time from October 20 - 26 in Marina Bay, Singapore.
Along with automobiles and drones, the necessity for unmanned boats has grown. To encourage and examine the development of these technologies, the U.S. Office of Naval Research decided to organize an unmanned boat competition which took place for the first time this year.
After three teams were selected from a domestic competition in each countries, a total of fifteen teams from five countries from the Pacific Rim including Korea, the United States, Australia, Japan, and Singapore competed. Teams from such universities as MIT, Tokyo University, Tokyo Institute of Technology, National University of Singapore, Nanyang Technological University, and Queensland University of Technology participated. In addition to KAIST, Seoul National University and Ulsan University participated.
Using a 4.5 meters long and 2.5 meters wide unmanned boat provided by the organizer, each team had to implement an integrated system that combined a propulsion system, hardware, and autonomous software. Each team’s vessel had to perform tasks without manual control, employing autonomous driving through recognition of the course, searching underwater for acoustic sources, automatically approaching piers, remote observation of buoy, and avoidance and detection of obstacles.
Although KAIST outpaced MIT in the semifinal which selected six out of fifteen teams, it won the second place in the final. As well as winning second prize, KAIST also won best website prize and a special prize from the competition sponsor, Northrop Grumman Corporation, an American defense technology company, totaling 16,500 U.S. dollars of prize money.
The Vice President for Planning and Budget, Professor Seungbin Park said, “It was a great opportunity to showcase the advanced unmanned robot technology of Korea.” He added that “this raised KAIST’s reputation as a global research oriented university.”
Professor Kim commented, “Along with automobiles and drones, the necessity for the development of unmanned ocean vehicles such as unmanned boats and submarines are recognized these days.” He added that “the use of unmanned boats will make the process of channel investigation, ocean exploration, surveillance over water territories safer and more effective.”
Professor Kim’s team was sponsored by the U.S. Office of Naval Research, Samsung Heavy Industries, Sonar Tech, Daeyang Electric, and Red-one Technology.
KAIST Team's Unmanned Boat
The Competition's Missions
2014.12.12 View 17070
KAIST wins second place in unmanned boat competition
KAIST took second place in an international competition to promote technologies of the autonomous underwater vehicle (AUV).
Professor Jin-hwan Kim’s research team from KAIST’s Ocean Systems Engineering Department won the second place in Maritime RobotX Challenge which took place for the first time from October 20 - 26 in Marina Bay, Singapore.
Along with automobiles and drones, the necessity for unmanned boats has grown. To encourage and examine the development of these technologies, the U.S. Office of Naval Research decided to organize an unmanned boat competition which took place for the first time this year.
After three teams were selected from a domestic competition in each countries, a total of fifteen teams from five countries from the Pacific Rim including Korea, the United States, Australia, Japan, and Singapore competed. Teams from such universities as MIT, Tokyo University, Tokyo Institute of Technology, National University of Singapore, Nanyang Technological University, and Queensland University of Technology participated. In addition to KAIST, Seoul National University and Ulsan University participated.
Using a 4.5 meters long and 2.5 meters wide unmanned boat provided by the organizer, each team had to implement an integrated system that combined a propulsion system, hardware, and autonomous software. Each team’s vessel had to perform tasks without manual control, employing autonomous driving through recognition of the course, searching underwater for acoustic sources, automatically approaching piers, remote observation of buoy, and avoidance and detection of obstacles.
Although KAIST outpaced MIT in the semifinal which selected six out of fifteen teams, it won the second place in the final. As well as winning second prize, KAIST also won best website prize and a special prize from the competition sponsor, Northrop Grumman Corporation, an American defense technology company, totaling 16,500 U.S. dollars of prize money.
The Vice President for Planning and Budget, Professor Seungbin Park said, “It was a great opportunity to showcase the advanced unmanned robot technology of Korea.” He added that “this raised KAIST’s reputation as a global research oriented university.”
Professor Kim commented, “Along with automobiles and drones, the necessity for the development of unmanned ocean vehicles such as unmanned boats and submarines are recognized these days.” He added that “the use of unmanned boats will make the process of channel investigation, ocean exploration, surveillance over water territories safer and more effective.”
Professor Kim’s team was sponsored by the U.S. Office of Naval Research, Samsung Heavy Industries, Sonar Tech, Daeyang Electric, and Red-one Technology.
KAIST Team's Unmanned Boat
The Competition's Missions
2014.12.12 View 17070 -
 KAIST was invited to the World Economic Forum's fourth "Summer Davos."
KAIST attended the World Economic Forum’s “Summer Davos Forum” held from September 13 to 15 in Tianjin, China. The Summer Davos Forum hosted various sessions and meetings with international dignitaries from governments, business and public organizations, and academia on the main theme of “Driving Growth through Sustainability.”
On September 14, four subjects including “Electric Vehicles,” “Humanoid Robotics,” “Next Generation of Biomaterials,” and “New Developments in Neuroengineering” were presented by KAIST, followed by discussions with forum participants.
Professor Jae-Seung Jeong of the Bio and Brain Engineering Department, Sang-Yup Lee of the Chemical and Biomolecular Engineering Department, Joon-Ho Oh of the Mechanical Engineering Department, and President Nam-Pyo Suh participated in the forum as presenters of the topic. Of these speakers, Professors Jae-Seung Jeong and Sang-Yup Lee were nominated by the World Economic Forum (WEF) as members of the “Young Global Leader” and “Global Agenda Council on Emerging Technologies,” respectively.
President Suh was also invited to the CEO Insight Group and delivered an opening speech on OLEV (Online Electric Vehicle) and the Mobile Harbor. President Suh plans to sign an MOU for research cooperation with Jong-Hoo Kim of Bell Lab and Shirley Jackson of the Rensselaer Polytechnic Institute in the near future, respectively.
Since 2007, the WEF, in charge of the world’s largest international conference called “Davos Forum” has hosted a “Summer Davos Forum,” also called as the “Annual Meeting of New Champions.” The Summer Davos Forum consists of nations, rising global companies, next generation of global leaders, and cities or nations that lead technological innovations. Unlike the annual Davos Forum held in January, the “Annual Meeting of New Champions” is held in September of each year in Tianjin and Dalian, China.
Since 2009, the WEF has added a special session called IdeasLab in the Davos and Summer Davos Forums. Through IdeasLab, prominent universities from all over the world, research organizations, venture businesses, NGOs, and NPOs are invited to exchange and discuss innovative and creative ideas that can contribute to the development of mankind. Until now, universities including INSEAD, EPFL-ETH, MIT, Oxford, Yale, Harvard, Rensselaer Polytechnic Institute, Tsinghua University, and Keio University have been invited to the IdeasLab. KAIST is the first Korean university to attend this session.
2010.09.17 View 32610
KAIST was invited to the World Economic Forum's fourth "Summer Davos."
KAIST attended the World Economic Forum’s “Summer Davos Forum” held from September 13 to 15 in Tianjin, China. The Summer Davos Forum hosted various sessions and meetings with international dignitaries from governments, business and public organizations, and academia on the main theme of “Driving Growth through Sustainability.”
On September 14, four subjects including “Electric Vehicles,” “Humanoid Robotics,” “Next Generation of Biomaterials,” and “New Developments in Neuroengineering” were presented by KAIST, followed by discussions with forum participants.
Professor Jae-Seung Jeong of the Bio and Brain Engineering Department, Sang-Yup Lee of the Chemical and Biomolecular Engineering Department, Joon-Ho Oh of the Mechanical Engineering Department, and President Nam-Pyo Suh participated in the forum as presenters of the topic. Of these speakers, Professors Jae-Seung Jeong and Sang-Yup Lee were nominated by the World Economic Forum (WEF) as members of the “Young Global Leader” and “Global Agenda Council on Emerging Technologies,” respectively.
President Suh was also invited to the CEO Insight Group and delivered an opening speech on OLEV (Online Electric Vehicle) and the Mobile Harbor. President Suh plans to sign an MOU for research cooperation with Jong-Hoo Kim of Bell Lab and Shirley Jackson of the Rensselaer Polytechnic Institute in the near future, respectively.
Since 2007, the WEF, in charge of the world’s largest international conference called “Davos Forum” has hosted a “Summer Davos Forum,” also called as the “Annual Meeting of New Champions.” The Summer Davos Forum consists of nations, rising global companies, next generation of global leaders, and cities or nations that lead technological innovations. Unlike the annual Davos Forum held in January, the “Annual Meeting of New Champions” is held in September of each year in Tianjin and Dalian, China.
Since 2009, the WEF has added a special session called IdeasLab in the Davos and Summer Davos Forums. Through IdeasLab, prominent universities from all over the world, research organizations, venture businesses, NGOs, and NPOs are invited to exchange and discuss innovative and creative ideas that can contribute to the development of mankind. Until now, universities including INSEAD, EPFL-ETH, MIT, Oxford, Yale, Harvard, Rensselaer Polytechnic Institute, Tsinghua University, and Keio University have been invited to the IdeasLab. KAIST is the first Korean university to attend this session.
2010.09.17 View 32610