National+Science+Foundation
-
 A Mathematical Model Reveals Long-Distance Cell Communication Mechanism
How can tens of thousands of people in a large football stadium all clap together with the same beat even though they can only hear the people near them clapping?
A combination of a partial differential equation and a synthetic circuit in microbes answers this question. An interdisciplinary collaborative team of Professor Jae Kyoung Kim at KAIST, Professor Krešimir Josić at the University of Houston, and Professor Matt Bennett at Rice University has identified how a large community can communicate with each other almost simultaneously even with very short distance signaling. The research was reported at Nature Chemical Biology.
Cells often communicate using signaling molecules, which can travel only a short distance. Nevertheless, the cells can also communicate over large distances to spur collective action. The team revealed a cell communication mechanism that quickly forms a network of local interactions to spur collective action, even in large communities.
The research team used an engineered transcriptional circuit of combined positive and negative feedback loops in E. coli, which can periodically release two types of signaling molecules: activator and repressor. As the signaling molecules travel over a short distance, cells can only talk to their nearest neighbors. However, cell communities synchronize oscillatory gene expression in spatially extended systems as long as the transcriptional circuit contains a positive feedback loop for the activator.
Professor Kim said that analyzing and understanding such high-dimensional dynamics was extremely difficult. He explained, “That’s why we used high-dimensional partial differential equation to describe the system based on the interactions among various types of molecules.” Surprisingly, the mathematical model accurately simulates the synthesis of the signaling molecules in the cell and their spatial diffusion throughout the chamber and their effect on neighboring cells.
The team simplified the high-dimensional system into a one-dimensional orbit, noting that the system repeats periodically. This allowed them to discover that cells can make one voice when they lowered their own voice and listened to the others. “It turns out the positive feedback loop reduces the distance between moving points and finally makes them move all together. That’s why you clap louder when you hear applause from nearby neighbors and everyone eventually claps together at almost the same time,” said Professor Kim.
Professor Kim added, “Math is a powerful as it simplifies complex thing so that we can find an essential underlying property. This finding would not have been possible without the simplification of complex systems using mathematics."
The National Institutes of Health, the National Science Foundation, the Robert A. Welch Foundation, the Hamill Foundation, the National Research Foundation of Korea, and the T.J. Park Science Fellowship of POSCO supported the research.
(Figure: Complex molecular interactions among microbial consortia is simplified as interactions among points on a limit cycle (right).)
2019.10.15 View 31399
A Mathematical Model Reveals Long-Distance Cell Communication Mechanism
How can tens of thousands of people in a large football stadium all clap together with the same beat even though they can only hear the people near them clapping?
A combination of a partial differential equation and a synthetic circuit in microbes answers this question. An interdisciplinary collaborative team of Professor Jae Kyoung Kim at KAIST, Professor Krešimir Josić at the University of Houston, and Professor Matt Bennett at Rice University has identified how a large community can communicate with each other almost simultaneously even with very short distance signaling. The research was reported at Nature Chemical Biology.
Cells often communicate using signaling molecules, which can travel only a short distance. Nevertheless, the cells can also communicate over large distances to spur collective action. The team revealed a cell communication mechanism that quickly forms a network of local interactions to spur collective action, even in large communities.
The research team used an engineered transcriptional circuit of combined positive and negative feedback loops in E. coli, which can periodically release two types of signaling molecules: activator and repressor. As the signaling molecules travel over a short distance, cells can only talk to their nearest neighbors. However, cell communities synchronize oscillatory gene expression in spatially extended systems as long as the transcriptional circuit contains a positive feedback loop for the activator.
Professor Kim said that analyzing and understanding such high-dimensional dynamics was extremely difficult. He explained, “That’s why we used high-dimensional partial differential equation to describe the system based on the interactions among various types of molecules.” Surprisingly, the mathematical model accurately simulates the synthesis of the signaling molecules in the cell and their spatial diffusion throughout the chamber and their effect on neighboring cells.
The team simplified the high-dimensional system into a one-dimensional orbit, noting that the system repeats periodically. This allowed them to discover that cells can make one voice when they lowered their own voice and listened to the others. “It turns out the positive feedback loop reduces the distance between moving points and finally makes them move all together. That’s why you clap louder when you hear applause from nearby neighbors and everyone eventually claps together at almost the same time,” said Professor Kim.
Professor Kim added, “Math is a powerful as it simplifies complex thing so that we can find an essential underlying property. This finding would not have been possible without the simplification of complex systems using mathematics."
The National Institutes of Health, the National Science Foundation, the Robert A. Welch Foundation, the Hamill Foundation, the National Research Foundation of Korea, and the T.J. Park Science Fellowship of POSCO supported the research.
(Figure: Complex molecular interactions among microbial consortia is simplified as interactions among points on a limit cycle (right).)
2019.10.15 View 31399 -
 First Korean Member of OceanObs' Organizing Committee
Professor Sung Yong Kim from the Department of Mechanical Engineering became the first Korean to be elected as an organizing committee member of the international conference OceanObs’19’, specializing in the ocean observing field.
Professor Kim has been actively engaged in advisory panels, technical committees, and working groups for the North Pacific Marine Science Organization (PICES). Through numerous activities, he was recognized for his professionalism and academic achievements, which led him to be appointed as a member of the organizing committee.
The organizing committee is comprised of leading scholars and researchers from 20 countries, and Professor Kim will be the first Korean scientist to participate on the committee.
Since 1999, the conference has been held every decade. Global experts specializing in oceanic observation gather to discuss research directions for the next ten years by monitoring physical, biological, and chemical variables in regional, national, and global oceans and applying marine engineering.
This year, approximately 20 institutes including NASA’s Jet Propulsion Laboratory (JPL), the National Science Foundation, the National Oceanic and Atmospheric Administration, and the European Space Agency will support funds as well as high-tech equipment to the conference.
This year’s conference theme is the governance of global ocean observing systems such as underwater gliders, unmanned vehicles, remote sensing, and observatories. The conference will hold discussions on monitoring technology and information systems to ensure human safety as well as to develop and preserve food resources. Additionally, participants will explore ways to expand observational infrastructures and carry out multidisciplinary approaches.
There will also be collaborations with the Global Ocean Observing System (GOOS) and the Partnership for Observation of the Global Oceans (POGO) to organize ocean observing programs and discuss priorities.
Finally, they will set a long-term plan for solving major scientific issues, such as climate change, ocean acidification, energy, and marine pollution.
Professor Kim said, “Based on the outcomes drawn from the conference, I will carry out research on natural disasters and climate change monitoring by using unmanned observing systems. I will also encourage more multidisciplinary research in this field.”
2019.01.25 View 14302
First Korean Member of OceanObs' Organizing Committee
Professor Sung Yong Kim from the Department of Mechanical Engineering became the first Korean to be elected as an organizing committee member of the international conference OceanObs’19’, specializing in the ocean observing field.
Professor Kim has been actively engaged in advisory panels, technical committees, and working groups for the North Pacific Marine Science Organization (PICES). Through numerous activities, he was recognized for his professionalism and academic achievements, which led him to be appointed as a member of the organizing committee.
The organizing committee is comprised of leading scholars and researchers from 20 countries, and Professor Kim will be the first Korean scientist to participate on the committee.
Since 1999, the conference has been held every decade. Global experts specializing in oceanic observation gather to discuss research directions for the next ten years by monitoring physical, biological, and chemical variables in regional, national, and global oceans and applying marine engineering.
This year, approximately 20 institutes including NASA’s Jet Propulsion Laboratory (JPL), the National Science Foundation, the National Oceanic and Atmospheric Administration, and the European Space Agency will support funds as well as high-tech equipment to the conference.
This year’s conference theme is the governance of global ocean observing systems such as underwater gliders, unmanned vehicles, remote sensing, and observatories. The conference will hold discussions on monitoring technology and information systems to ensure human safety as well as to develop and preserve food resources. Additionally, participants will explore ways to expand observational infrastructures and carry out multidisciplinary approaches.
There will also be collaborations with the Global Ocean Observing System (GOOS) and the Partnership for Observation of the Global Oceans (POGO) to organize ocean observing programs and discuss priorities.
Finally, they will set a long-term plan for solving major scientific issues, such as climate change, ocean acidification, energy, and marine pollution.
Professor Kim said, “Based on the outcomes drawn from the conference, I will carry out research on natural disasters and climate change monitoring by using unmanned observing systems. I will also encourage more multidisciplinary research in this field.”
2019.01.25 View 14302 -
 U.S. and Korean Researchers Unveil Newest Research Team Member: Jaemi the Humanoid
- Project aims to enable humanoids to interact with people and their environment
June 1, 2009-- A Drexel University-led research team late last week unveiled the newest, most central member of its collaboration with a team of Korean researchers: Jaemi, a humanoid (HUBO). Jaemi HUBO embodies efforts to advance humanoid development and enhance the concept of human-robotic interaction. The project"s goal is to enable humanoids to interact with their environment, and enhancement plans include enabling the humanoid to move over rugged terrain, in unstructured environments and to interact socially with humans and handle objects.
The five-year project, funded through the National Science Foundation (NSF) Partnership for International Research and Education (PIRE) program, seeks transformative models to catalyze discovery through international research collaboration and train U.S. students and junior researchers to effectively think and work in global teams.
"The field of robotics is among the top 10 technology areas considered engines for economic growth. Korea understands this and is aggressively pursuing robotics. To stay competitive, the U.S. must do the same," said Mark Suskin, acting deputy director of NSF"s Office of International Science and Engineering. "NSF"s PIRE program and this robotics collaboration in particular, enable the U.S. to capitalize on research in other countries and remain competitive."
The PIRE research team is composed of researchers at The University of Pennsylvania, Colby College, Bryn Mawr College and Virginia Tech in the United States; and Korea Advanced Institute of Science and Technology (KAIST), Korea University and Seoul National University in Korea.
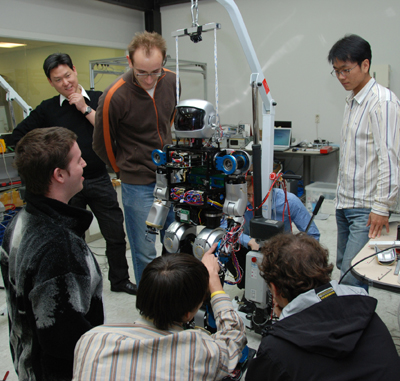
The team obtained a version of KAIST"s HUBO humanoid, which it named Jaemi HUBO and decided to house it at Drexel University. KAIST HUBO lab has become a model of cutting advance humanoid research by relatively small teams working on tight budgets.
KAIST excels in humanoid leg and body design, biped gait (walking, running, kicking), balance (modeling and control system design), and hardware integration. U.S. robotics researchers tend to enjoy an edge in locomotion over rugged, unstructured terrain; manipulation/grasping; cognition, perception and human-robot interaction; and vision (image, understanding, navigation).
This collaboration of American and Korean researchers will seek to draw on the expertise of each researcher and take Jaemi HUBO to the next level of development--that is, to improve Jaemi"s capabilities to navigate and manipulate objects and interact with people in unstructured environments. Such capabilities demand information technologies like cognition, perception and networking areas. Targeted enhancement features include a capability to move over rugged terrain and in unstructured environments and to handle objects and interact socially with humans.
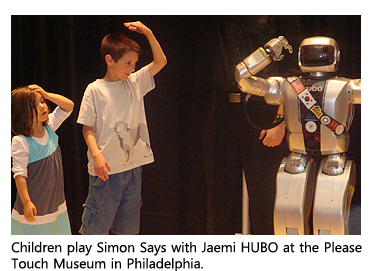
Jaemi HUBO will also educate the American public, particularly young people, about the science of robotics. This education process began at the Please Touch Museum in Philadelphia on May 28, 2009, when Jaemi HUBO was unveiled and introduced to a crowded audience of children and a few adults. Neither male nor female,Jaemi connected with the children, boys and girls alike. Guided by a Drexel University graduate student, Jamei moved, spoke, danced, shook hands and lead the children in a game of Simon Says. Such access to Jaemi HUBO starkly contrasts with that afforded by other high-profile humanoids that are often protected trade secrets, largely inaccessible to the public.
Museum curators are pleased to have had Jaemi visit and entertain kids during the weekend. "At the Please Touch Museum, we promote learning through a variety of senses," said J. Willard Whitson,the museum"s vice president for exhibits and education. "A humanoid not only embodies our goal of building layers of knowledge in young people, but Jaemi helps all of us celebrate the playful side of technology."
Jaemi HUBO is now at its permanent home at Drexel University, from which travel and guest appearances may be arranged by appointment. Journalists interested in meeting and interviewing Jaemi HUBO and other research team members are encouraged to contact Lisa-Joy Zgorski at lisajoy@nsf.gov. (Press Release of U.S. National Science Foundation)
2009.06.19 View 18494
U.S. and Korean Researchers Unveil Newest Research Team Member: Jaemi the Humanoid
- Project aims to enable humanoids to interact with people and their environment
June 1, 2009-- A Drexel University-led research team late last week unveiled the newest, most central member of its collaboration with a team of Korean researchers: Jaemi, a humanoid (HUBO). Jaemi HUBO embodies efforts to advance humanoid development and enhance the concept of human-robotic interaction. The project"s goal is to enable humanoids to interact with their environment, and enhancement plans include enabling the humanoid to move over rugged terrain, in unstructured environments and to interact socially with humans and handle objects.
The five-year project, funded through the National Science Foundation (NSF) Partnership for International Research and Education (PIRE) program, seeks transformative models to catalyze discovery through international research collaboration and train U.S. students and junior researchers to effectively think and work in global teams.
"The field of robotics is among the top 10 technology areas considered engines for economic growth. Korea understands this and is aggressively pursuing robotics. To stay competitive, the U.S. must do the same," said Mark Suskin, acting deputy director of NSF"s Office of International Science and Engineering. "NSF"s PIRE program and this robotics collaboration in particular, enable the U.S. to capitalize on research in other countries and remain competitive."
The PIRE research team is composed of researchers at The University of Pennsylvania, Colby College, Bryn Mawr College and Virginia Tech in the United States; and Korea Advanced Institute of Science and Technology (KAIST), Korea University and Seoul National University in Korea.
The team obtained a version of KAIST"s HUBO humanoid, which it named Jaemi HUBO and decided to house it at Drexel University. KAIST HUBO lab has become a model of cutting advance humanoid research by relatively small teams working on tight budgets.
KAIST excels in humanoid leg and body design, biped gait (walking, running, kicking), balance (modeling and control system design), and hardware integration. U.S. robotics researchers tend to enjoy an edge in locomotion over rugged, unstructured terrain; manipulation/grasping; cognition, perception and human-robot interaction; and vision (image, understanding, navigation).
This collaboration of American and Korean researchers will seek to draw on the expertise of each researcher and take Jaemi HUBO to the next level of development--that is, to improve Jaemi"s capabilities to navigate and manipulate objects and interact with people in unstructured environments. Such capabilities demand information technologies like cognition, perception and networking areas. Targeted enhancement features include a capability to move over rugged terrain and in unstructured environments and to handle objects and interact socially with humans.
Jaemi HUBO will also educate the American public, particularly young people, about the science of robotics. This education process began at the Please Touch Museum in Philadelphia on May 28, 2009, when Jaemi HUBO was unveiled and introduced to a crowded audience of children and a few adults. Neither male nor female,Jaemi connected with the children, boys and girls alike. Guided by a Drexel University graduate student, Jamei moved, spoke, danced, shook hands and lead the children in a game of Simon Says. Such access to Jaemi HUBO starkly contrasts with that afforded by other high-profile humanoids that are often protected trade secrets, largely inaccessible to the public.
Museum curators are pleased to have had Jaemi visit and entertain kids during the weekend. "At the Please Touch Museum, we promote learning through a variety of senses," said J. Willard Whitson,the museum"s vice president for exhibits and education. "A humanoid not only embodies our goal of building layers of knowledge in young people, but Jaemi helps all of us celebrate the playful side of technology."
Jaemi HUBO is now at its permanent home at Drexel University, from which travel and guest appearances may be arranged by appointment. Journalists interested in meeting and interviewing Jaemi HUBO and other research team members are encouraged to contact Lisa-Joy Zgorski at lisajoy@nsf.gov. (Press Release of U.S. National Science Foundation)
2009.06.19 View 18494 -
 Prof. Chong Unveils New Human Movement Model
A KAIST research team headed by Prof. Song Chong of the School of Electrical Engineering and Computer Science has developed a new statistical model that simulates human mobility patterns, mimicking the way people move over the course of a day, a month or longer, university sources said on Tuesday (May 12).
The model, developed in collaboration with scientists at North Carolina State University, is the first to represent the regular movement patterns of humans using statistical data.
The model has a variety of potential uses, ranging from land use planning to public health studies on epidemic disease.
The researchers gave global positioning system (GPS) devices to approximately 100 volunteers at five locations in the U.S. and South Korea and tracked the participants" movements over time. By tracing the points where the study participants stopped, and their movement trajectories, researchers were able to determine patterns of mobility behavior.
The researchers were then able to emulate these fundamental statistical properties of human mobility into a model that could be used to represent the regular daily movement of humans. The model, called Self-similar Least Action Walk (SLAW), will have a wide array of practical applications.
The research, "SLAW: A Mobility Model for Human Walks," was presented on April 20 at the 28th IEEE Conference on Computer Communications in Rio de Janeiro, Brazil. The National Science Foundation of the U.S. funded the research.
2009.05.13 View 17207
Prof. Chong Unveils New Human Movement Model
A KAIST research team headed by Prof. Song Chong of the School of Electrical Engineering and Computer Science has developed a new statistical model that simulates human mobility patterns, mimicking the way people move over the course of a day, a month or longer, university sources said on Tuesday (May 12).
The model, developed in collaboration with scientists at North Carolina State University, is the first to represent the regular movement patterns of humans using statistical data.
The model has a variety of potential uses, ranging from land use planning to public health studies on epidemic disease.
The researchers gave global positioning system (GPS) devices to approximately 100 volunteers at five locations in the U.S. and South Korea and tracked the participants" movements over time. By tracing the points where the study participants stopped, and their movement trajectories, researchers were able to determine patterns of mobility behavior.
The researchers were then able to emulate these fundamental statistical properties of human mobility into a model that could be used to represent the regular daily movement of humans. The model, called Self-similar Least Action Walk (SLAW), will have a wide array of practical applications.
The research, "SLAW: A Mobility Model for Human Walks," was presented on April 20 at the 28th IEEE Conference on Computer Communications in Rio de Janeiro, Brazil. The National Science Foundation of the U.S. funded the research.
2009.05.13 View 17207 -
 KAIST Collaborating with U.S. Universities to Advance Humanoid Robotics
Hubo, a life-size walking bipedal humanoid robot, is perhaps the best-known character in Korea that KAIST has ever produced. It was shown to the government heads of the Asia-Pacific region during the APEC held in Busan, Korea, in 2005 and appeared at the hit concerts of the pop singer Jang-Hoon Kim. The humanoid robot is soon likely to catch the fancy of Americans as a U.S. government-funded project seeks to create a Hubo that can work and interact with people in collaboration with Korean scientists.
"We are going to give the brains to Hubo. (Japanese) Asimo can do only pre-programmed actions. We want to create a Hubo that can help people, interact with people," said Prof. Paul Oh of the Department of Mechanical Engineering & Mechanics at Drexel University in Philadelphia and leader of the five-year international project which was launched in November 2007.
The U.S.$2.5 million project is funded through the Partnership for International Research and Education (PIRE) Program of the National Science Foundation (NSF) of the United States. It brings together world-renowned experts in humanoid design and information technologies.
"Dr. Jun-Ho Oh"s lab at KAIST (that has created Hubo) is the world"s leader in humanoid design and the U.S. has advanced technologies in the areas such as artificial intelligence, mechanical learning and robot vision. Combining the strengths of the two countries can create a synergy effect and develop a more advanced humanoid robot," said Paul Oh. He is currently serving as Program Director of Robotics of the NSF which is overseeing robotics research (non-military) in the U.S. consisting over 150 robotics faculty.
Paul Oh"s research team consists of experts from five U.S. universities -- Drexel, Bryn Mawr College, Colby College, the University of Pennsylvania and Virginia Tech -- and KAIST.
Leading a delegation of six professors and eight students, Dr. Paul Oh made a two-day visit to KAIST on Nov. 18-19 to review the progress of the project and have a technical meeting with participants.
"The U.S. universities participating in this program are scattered across the nation. So we decided to have a technical meeting here in Korea," he said.
Asked the reason why he chose KAIST as a partner for the program, Dr. Oh said that KAIST is willing to open Hugo to international researchers, whereas in Japan only Honda engineers are allowed to touch Asimo, which is a humanoid robot created by Honda Motor Company.
The project is to establish no barrier for roboticists anywhere in the world to pursue the humanoid research; a suite of humanoid platforms will be available for researchers to develop and advance capabilities like locomotion and human-robot interaction.
The team has been initially involved in development of three tools, all of which are based on the Hubo platform, in order to kick-start humanoid research in the U.S. They are the Mini-Hubo (a small, light-weight and affordable humanoid purchasable at the price lower than $8,000), On-Line Hubo (a program to operate Hubo online) and Virtual Hubo (a simulation program to do researches in cyberspace). As the first outcome of the project, the Mini-Hubo is expected to be released in the U.S. around next April.
Another important purpose of the PIRE program is to seek transformative models to train scientists and engineers to effectively work in global multi-disciplined design teams. To this end, an aggregate number of 20 students from U.S. universities are to stay at the KAIST during the next five years, with two students taking turns on a six-month term.
"I was really amazed how much work is done with small funding here. This is really an excellent example to learn," said Roy Gross, an undergraduate from Drexel who has been staying at Prof. Oh"s Lab for the past three months.
2008.11.21 View 23286
KAIST Collaborating with U.S. Universities to Advance Humanoid Robotics
Hubo, a life-size walking bipedal humanoid robot, is perhaps the best-known character in Korea that KAIST has ever produced. It was shown to the government heads of the Asia-Pacific region during the APEC held in Busan, Korea, in 2005 and appeared at the hit concerts of the pop singer Jang-Hoon Kim. The humanoid robot is soon likely to catch the fancy of Americans as a U.S. government-funded project seeks to create a Hubo that can work and interact with people in collaboration with Korean scientists.
"We are going to give the brains to Hubo. (Japanese) Asimo can do only pre-programmed actions. We want to create a Hubo that can help people, interact with people," said Prof. Paul Oh of the Department of Mechanical Engineering & Mechanics at Drexel University in Philadelphia and leader of the five-year international project which was launched in November 2007.
The U.S.$2.5 million project is funded through the Partnership for International Research and Education (PIRE) Program of the National Science Foundation (NSF) of the United States. It brings together world-renowned experts in humanoid design and information technologies.
"Dr. Jun-Ho Oh"s lab at KAIST (that has created Hubo) is the world"s leader in humanoid design and the U.S. has advanced technologies in the areas such as artificial intelligence, mechanical learning and robot vision. Combining the strengths of the two countries can create a synergy effect and develop a more advanced humanoid robot," said Paul Oh. He is currently serving as Program Director of Robotics of the NSF which is overseeing robotics research (non-military) in the U.S. consisting over 150 robotics faculty.
Paul Oh"s research team consists of experts from five U.S. universities -- Drexel, Bryn Mawr College, Colby College, the University of Pennsylvania and Virginia Tech -- and KAIST.
Leading a delegation of six professors and eight students, Dr. Paul Oh made a two-day visit to KAIST on Nov. 18-19 to review the progress of the project and have a technical meeting with participants.
"The U.S. universities participating in this program are scattered across the nation. So we decided to have a technical meeting here in Korea," he said.
Asked the reason why he chose KAIST as a partner for the program, Dr. Oh said that KAIST is willing to open Hugo to international researchers, whereas in Japan only Honda engineers are allowed to touch Asimo, which is a humanoid robot created by Honda Motor Company.
The project is to establish no barrier for roboticists anywhere in the world to pursue the humanoid research; a suite of humanoid platforms will be available for researchers to develop and advance capabilities like locomotion and human-robot interaction.
The team has been initially involved in development of three tools, all of which are based on the Hubo platform, in order to kick-start humanoid research in the U.S. They are the Mini-Hubo (a small, light-weight and affordable humanoid purchasable at the price lower than $8,000), On-Line Hubo (a program to operate Hubo online) and Virtual Hubo (a simulation program to do researches in cyberspace). As the first outcome of the project, the Mini-Hubo is expected to be released in the U.S. around next April.
Another important purpose of the PIRE program is to seek transformative models to train scientists and engineers to effectively work in global multi-disciplined design teams. To this end, an aggregate number of 20 students from U.S. universities are to stay at the KAIST during the next five years, with two students taking turns on a six-month term.
"I was really amazed how much work is done with small funding here. This is really an excellent example to learn," said Roy Gross, an undergraduate from Drexel who has been staying at Prof. Oh"s Lab for the past three months.
2008.11.21 View 23286 -
 Ju-pyeong Lee won the Best Paper Award from IEEE RTAS
Ju-pyeong Lee, doctoral student of the Dept. of Electrical Engineering of KAIST, received the Best Paper Award from the 11th Institute of Electrical and Electronics Engineers Real-Time and Embedded Technology and Applications Symposium (IEEE RTAS) sponsored by IEEE TC on Real Time System and supported from the U.S. National Science Foundation.
He is in the Computer Engineering laboratory, and won the honor by his research of technique of Delayed Locking Technique for Improving Real-Time Performance of Embedded Linux by Prediction of Timer Interrupt. His paper was selected to be the best because of its practicality. His research purposed the technique that can dramatically improve real time problem, which was indicated to be the big problem of Linux. Moreover, he presented the way to easily materialize this technique in the practical system.
Best Paper Award is the prize awarded by IEEE Computer Society in the recognition of outstanding achievement in the field of real time system and embedded technology.
IEEE RTAS is a symposium held annually by IEEE. In this year, the 11th symposium was held from March 7 to March 10, for four days, in San Francisco, United States. The purpose of this year symposium was to seek papers describing significant contributions both to state of the art and state of the practice in the broad field of embedded and open real-time computing, control, and communication. Therefore, it especially focused on online real-time and embedded applications ranging from industrial embedded applications such as aeronautics and automotive systems to open multimedia, telecommunication and mobile computing systems.
Approximately 200 related erudite from almost 20 countries including United States, England, France, Germany, Italy, and Sweden participated in this symposium. Total number of papers submitted to IEEE RTAS was 158, while only 53 of them were selected.
by Hye-jung Won / Staff ReporterApril, 2005 / The KAIST Herald
2005.04.12 View 22478
Ju-pyeong Lee won the Best Paper Award from IEEE RTAS
Ju-pyeong Lee, doctoral student of the Dept. of Electrical Engineering of KAIST, received the Best Paper Award from the 11th Institute of Electrical and Electronics Engineers Real-Time and Embedded Technology and Applications Symposium (IEEE RTAS) sponsored by IEEE TC on Real Time System and supported from the U.S. National Science Foundation.
He is in the Computer Engineering laboratory, and won the honor by his research of technique of Delayed Locking Technique for Improving Real-Time Performance of Embedded Linux by Prediction of Timer Interrupt. His paper was selected to be the best because of its practicality. His research purposed the technique that can dramatically improve real time problem, which was indicated to be the big problem of Linux. Moreover, he presented the way to easily materialize this technique in the practical system.
Best Paper Award is the prize awarded by IEEE Computer Society in the recognition of outstanding achievement in the field of real time system and embedded technology.
IEEE RTAS is a symposium held annually by IEEE. In this year, the 11th symposium was held from March 7 to March 10, for four days, in San Francisco, United States. The purpose of this year symposium was to seek papers describing significant contributions both to state of the art and state of the practice in the broad field of embedded and open real-time computing, control, and communication. Therefore, it especially focused on online real-time and embedded applications ranging from industrial embedded applications such as aeronautics and automotive systems to open multimedia, telecommunication and mobile computing systems.
Approximately 200 related erudite from almost 20 countries including United States, England, France, Germany, Italy, and Sweden participated in this symposium. Total number of papers submitted to IEEE RTAS was 158, while only 53 of them were selected.
by Hye-jung Won / Staff ReporterApril, 2005 / The KAIST Herald
2005.04.12 View 22478