college+of+engineering
-
 KAIST School of Computing Unveils 'KRAFTON Building,' A Symbol of Collective Generosity
< (From the fifth from the left) Provost and Executive Vice President Gyun Min Lee, Auditor Eun Woo Lee, President Kwang-Hyung Lee, Dean of the School of Computing Seok-Young Ryu, former Krafton member and donor Woong-Hee Cho, Krafton Chairman Byung-Gyu Chang >
KAIST announced on May 20th the completion of the expansion building for its School of Computing, the "KRAFTON Building." The project began in June 2021 with an ₩11 billion donation from KRAFTON and its employees, eventually growing to ₩11.7 billion with contributions from 204 donors.
Designed as a "Pay It Forward" space, the building aims to enable alumni to pass on the gratitude they received from the school to their juniors and foster connection. Byung-Gyu Chang, Chairman of KRAFTON and a KAIST alumnus, expressed his joy, stating, "I am very pleased that the first building created by alumni donations within KAIST is now complete, and I hope it will continue to be a space for communication, challenges, and growth that connects to the next generation."
The completion ceremony, held today at 3 PM in front of the KRAFTON SoC (School of Computing) Building at KAIST's main campus, was attended by over 100 people, including Chairman Byung-Gyu Chang, KAIST President Kwang-Hyung Lee, and Dean Seok-Young Ryu of the KAIST School of Computing.
The building's inception dates back to June 2021, with an ₩11 billion donation from the gaming company KRAFTON and its current and former members, dedicated to nurturing future software talent at KAIST. Four alumni, including KRAFTON Chairman Byung-Gyu Chang, who graduated from the KAIST School of Computing, were the first to pledge donations. This initial act inspired more participants, leading to ₩5.5 billion in individual donations from a total of 11 people. KRAFTON Inc. then matched this amount, bringing the total donation to ₩11 billion.
Since 2021, KRAFTON Inc. has operated a "Matching Grant" program, a donation culture initiative driven by its members. This system allows the company to match funds voluntarily raised by its employees, aiming to encourage active social participation and the creation of social value among its members.
Following this, another 11 KAIST alumni from Devsisters Inc., famous for the Cookie Run series, joined the donation effort. This wave of generosity expanded to include a total of 204 participants, comprising graduates, alumni professors, and current students, acting as a catalyst for the spread of a donation culture within the campus. To date, approximately ₩11.7 billion has been raised for the expansion of the School of Computing building. Furthermore, small donations, including those from alumni and the general public, have continuously grown, reaching over 50,000 instances from 2021 to May 2025.
The funds raised through donations were used to construct a 2,000-pyeong (approximately 6,600 square meters) building for individuals who, like Chairman Byung-Gyu Chang, will unleash their potential and become global leaders. The building was named "KRAFTON SoC (KRAFTON SoC)," and KRAFTON Inc. has further pledged additional donations for the building's maintenance over the next 10 years.
The newly completed KRAFTON Building is a six-story structure. From the second floor up, it features research labs for 20 professors and graduate students to freely pursue their research, along with large lecture halls. The first floor is designed as a meeting place for current students, alumni, and seniors, serving as a space to remember those who came before them.
The four lecture halls on the first floor are designated as "Immersion Camp Classrooms." During the summer and winter sessions, these rooms will be used for intensive month-long courses focused on improving coding and collaboration skills. During regular semesters, they will be utilized for other lectures.
Additionally, to support the physical and mental well-being of those weary from study and research, the building includes a small café on the first floor, a fitness center on the second floor, a Pilates studio on the fifth floor, and a soundproof band practice room in the basement.
Dean Seok-Young Ryu of the School of Computing explained, "The motivation for this wave of donations began with gratitude for the excellent professors and wonderful students, the free and open communication, the comfortable acceptance of diversity among various members, and the time when we could fearlessly dream. We cannot fully repay those who provided us with such precious time and space, but instead, this will be a 'Pay It Forward' space, a space of connection, where we share this gratitude with our juniors."
Alumnus Byung-Gyu Chang shared, "KAIST is more than just an academic foundation for me; it's a meaningful place that helped me set the direction for my life. I am very happy that this space, born from the desire of KRAFTON's members and myself to give back the opportunities and learning we received to the next generation, is completed today. I hope this space becomes a small but warm echo for KAIST members who freely communicate, challenge themselves, and grow."
< Congratulatory speech by alumnus Byung-Gyu Chang >
President Kwang-Hyung Lee stated, "The KRAFTON SoC, the expanded building for the School of Computing, is not just a space; it is the culmination of the KAIST community spirit created by alumni, current students, and faculty. I sincerely thank everyone who participated in this meaningful donation, which demonstrates the power of sharing and connection."
< Commemorative speech by President Kwang-Hyung Lee >
On a related note, the KAIST Development Foundation is actively promoting the "TeamKAIST" campaign for the general public and KAIST alumni to meet more "Daddy Long-Legs" (benefactors) for KAIST.
Website: https://giving.kaist.ac.kr/ko/sub01/sub0103_1.php
2025.05.21 View 30
KAIST School of Computing Unveils 'KRAFTON Building,' A Symbol of Collective Generosity
< (From the fifth from the left) Provost and Executive Vice President Gyun Min Lee, Auditor Eun Woo Lee, President Kwang-Hyung Lee, Dean of the School of Computing Seok-Young Ryu, former Krafton member and donor Woong-Hee Cho, Krafton Chairman Byung-Gyu Chang >
KAIST announced on May 20th the completion of the expansion building for its School of Computing, the "KRAFTON Building." The project began in June 2021 with an ₩11 billion donation from KRAFTON and its employees, eventually growing to ₩11.7 billion with contributions from 204 donors.
Designed as a "Pay It Forward" space, the building aims to enable alumni to pass on the gratitude they received from the school to their juniors and foster connection. Byung-Gyu Chang, Chairman of KRAFTON and a KAIST alumnus, expressed his joy, stating, "I am very pleased that the first building created by alumni donations within KAIST is now complete, and I hope it will continue to be a space for communication, challenges, and growth that connects to the next generation."
The completion ceremony, held today at 3 PM in front of the KRAFTON SoC (School of Computing) Building at KAIST's main campus, was attended by over 100 people, including Chairman Byung-Gyu Chang, KAIST President Kwang-Hyung Lee, and Dean Seok-Young Ryu of the KAIST School of Computing.
The building's inception dates back to June 2021, with an ₩11 billion donation from the gaming company KRAFTON and its current and former members, dedicated to nurturing future software talent at KAIST. Four alumni, including KRAFTON Chairman Byung-Gyu Chang, who graduated from the KAIST School of Computing, were the first to pledge donations. This initial act inspired more participants, leading to ₩5.5 billion in individual donations from a total of 11 people. KRAFTON Inc. then matched this amount, bringing the total donation to ₩11 billion.
Since 2021, KRAFTON Inc. has operated a "Matching Grant" program, a donation culture initiative driven by its members. This system allows the company to match funds voluntarily raised by its employees, aiming to encourage active social participation and the creation of social value among its members.
Following this, another 11 KAIST alumni from Devsisters Inc., famous for the Cookie Run series, joined the donation effort. This wave of generosity expanded to include a total of 204 participants, comprising graduates, alumni professors, and current students, acting as a catalyst for the spread of a donation culture within the campus. To date, approximately ₩11.7 billion has been raised for the expansion of the School of Computing building. Furthermore, small donations, including those from alumni and the general public, have continuously grown, reaching over 50,000 instances from 2021 to May 2025.
The funds raised through donations were used to construct a 2,000-pyeong (approximately 6,600 square meters) building for individuals who, like Chairman Byung-Gyu Chang, will unleash their potential and become global leaders. The building was named "KRAFTON SoC (KRAFTON SoC)," and KRAFTON Inc. has further pledged additional donations for the building's maintenance over the next 10 years.
The newly completed KRAFTON Building is a six-story structure. From the second floor up, it features research labs for 20 professors and graduate students to freely pursue their research, along with large lecture halls. The first floor is designed as a meeting place for current students, alumni, and seniors, serving as a space to remember those who came before them.
The four lecture halls on the first floor are designated as "Immersion Camp Classrooms." During the summer and winter sessions, these rooms will be used for intensive month-long courses focused on improving coding and collaboration skills. During regular semesters, they will be utilized for other lectures.
Additionally, to support the physical and mental well-being of those weary from study and research, the building includes a small café on the first floor, a fitness center on the second floor, a Pilates studio on the fifth floor, and a soundproof band practice room in the basement.
Dean Seok-Young Ryu of the School of Computing explained, "The motivation for this wave of donations began with gratitude for the excellent professors and wonderful students, the free and open communication, the comfortable acceptance of diversity among various members, and the time when we could fearlessly dream. We cannot fully repay those who provided us with such precious time and space, but instead, this will be a 'Pay It Forward' space, a space of connection, where we share this gratitude with our juniors."
Alumnus Byung-Gyu Chang shared, "KAIST is more than just an academic foundation for me; it's a meaningful place that helped me set the direction for my life. I am very happy that this space, born from the desire of KRAFTON's members and myself to give back the opportunities and learning we received to the next generation, is completed today. I hope this space becomes a small but warm echo for KAIST members who freely communicate, challenge themselves, and grow."
< Congratulatory speech by alumnus Byung-Gyu Chang >
President Kwang-Hyung Lee stated, "The KRAFTON SoC, the expanded building for the School of Computing, is not just a space; it is the culmination of the KAIST community spirit created by alumni, current students, and faculty. I sincerely thank everyone who participated in this meaningful donation, which demonstrates the power of sharing and connection."
< Commemorative speech by President Kwang-Hyung Lee >
On a related note, the KAIST Development Foundation is actively promoting the "TeamKAIST" campaign for the general public and KAIST alumni to meet more "Daddy Long-Legs" (benefactors) for KAIST.
Website: https://giving.kaist.ac.kr/ko/sub01/sub0103_1.php
2025.05.21 View 30 -
 <Big Coins> Exhibition: Where Coins and Imagination Collide - Held at SUPEX Hall, KAIST Seoul Campus
KAIST (President Kwang-Hyung Lee) announced on May 19th the opening of the solo exhibition, “Big Coins,” by photographer and media artist Hojun Ji (Adjunct Professor, Department of Industrial Design) at the SUPEX Hall in the Business School of the Seoul Campus. The exhibition will run from May 19th to the end of February of the following year.
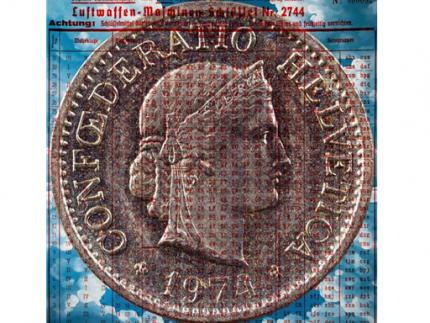
This exhibition at the KAIST Seoul Campus Business School presents artworks with an insightful perspective, inviting diverse interpretations from the audience. Notable pieces include ‘Priced,’ which juxtaposes Leonardo da Vinci's ‘Salvator Mundi,’ sold for approximately 450 million US dollars at a 2017 auction, with a Vatican coin bearing the image of Pope John XXIII. Another work, ‘Ciphered,’ superimposes a code used by the German army during World War II onto a Swiss coin featuring Helvetia.
< Priced, 150x150cm, 2025 >
Currently, Hojun Ji, an Adjunct Professor in KAIST’s Department of Industrial Design (and a student at the KAIST Graduate School of Culture Technology), creates his art using images captured by observing everyday objects through optical or electron microscopes.
He has garnered particular attention for his unique artistic world, which combines enlarged microscopic photographs of coins from across the globe with significant news articles from modern and contemporary history.
Yeo-sun Yoon, Dean of the College of Business Administration, commented, “While the KAIST Art Museum is located at the main campus in Daejeon, the College of Business Administration here on the Seoul Campus also regularly hosts exhibitions curated by the museum. I am delighted to encounter a new realm of art through this solo exhibition by Artist Hojun Ji.”
< Ciphered, 150x150cm, 2025 >
Hyeon-Jeong Suk, Director of the Art Museum and a Full Professor in KAIST’s Department of Industrial Design, remarked, “Professor Hojun Ji's experimental imagination is remarkably unique and eccentric. As a graduate student, he connected data from his observations of his lab dog’s droppings with Jeong Seon's <Geumgang Jeondo>. Such imaginative thinking exemplifies the direction KAIST is pursuing.”
Artist Hojun Ji stated, “The coins I examined through optical and electron microscopes were not merely a form of payment but rather portraits of humanity etched with time and power. The history and memories embedded in their fine cracks and textures resonated with me as a singular sculpture. I aim to unlock the vast world of imagination concealed within these small pieces of metal.”
< Geumgang Byeondo: a Variation of the View of Mt. Geumgang (a twist of Geumgang Jeondo - a Complete View of Geumgangsan Mountain, 1734), 80x120cm, 2009 >
Ji has presented experimental works that transcend the boundaries of science and art through numerous exhibitions both domestically and internationally. His work has also been featured on the cover of the international academic journal Digital Creativity and is increasingly recognized for its artistic merit, with pieces housed in the Embassy of the Republic of Korea in Turkey, the Seoul Museum of Art, and the 9/11 Memorial Center in the United States.
This solo exhibition, which will continue until the end of February of next year, is open to KAIST members and external visitors free of charge.
2025.05.20 View 42
<Big Coins> Exhibition: Where Coins and Imagination Collide - Held at SUPEX Hall, KAIST Seoul Campus
KAIST (President Kwang-Hyung Lee) announced on May 19th the opening of the solo exhibition, “Big Coins,” by photographer and media artist Hojun Ji (Adjunct Professor, Department of Industrial Design) at the SUPEX Hall in the Business School of the Seoul Campus. The exhibition will run from May 19th to the end of February of the following year.
This exhibition at the KAIST Seoul Campus Business School presents artworks with an insightful perspective, inviting diverse interpretations from the audience. Notable pieces include ‘Priced,’ which juxtaposes Leonardo da Vinci's ‘Salvator Mundi,’ sold for approximately 450 million US dollars at a 2017 auction, with a Vatican coin bearing the image of Pope John XXIII. Another work, ‘Ciphered,’ superimposes a code used by the German army during World War II onto a Swiss coin featuring Helvetia.
< Priced, 150x150cm, 2025 >
Currently, Hojun Ji, an Adjunct Professor in KAIST’s Department of Industrial Design (and a student at the KAIST Graduate School of Culture Technology), creates his art using images captured by observing everyday objects through optical or electron microscopes.
He has garnered particular attention for his unique artistic world, which combines enlarged microscopic photographs of coins from across the globe with significant news articles from modern and contemporary history.
Yeo-sun Yoon, Dean of the College of Business Administration, commented, “While the KAIST Art Museum is located at the main campus in Daejeon, the College of Business Administration here on the Seoul Campus also regularly hosts exhibitions curated by the museum. I am delighted to encounter a new realm of art through this solo exhibition by Artist Hojun Ji.”
< Ciphered, 150x150cm, 2025 >
Hyeon-Jeong Suk, Director of the Art Museum and a Full Professor in KAIST’s Department of Industrial Design, remarked, “Professor Hojun Ji's experimental imagination is remarkably unique and eccentric. As a graduate student, he connected data from his observations of his lab dog’s droppings with Jeong Seon's <Geumgang Jeondo>. Such imaginative thinking exemplifies the direction KAIST is pursuing.”
Artist Hojun Ji stated, “The coins I examined through optical and electron microscopes were not merely a form of payment but rather portraits of humanity etched with time and power. The history and memories embedded in their fine cracks and textures resonated with me as a singular sculpture. I aim to unlock the vast world of imagination concealed within these small pieces of metal.”
< Geumgang Byeondo: a Variation of the View of Mt. Geumgang (a twist of Geumgang Jeondo - a Complete View of Geumgangsan Mountain, 1734), 80x120cm, 2009 >
Ji has presented experimental works that transcend the boundaries of science and art through numerous exhibitions both domestically and internationally. His work has also been featured on the cover of the international academic journal Digital Creativity and is increasingly recognized for its artistic merit, with pieces housed in the Embassy of the Republic of Korea in Turkey, the Seoul Museum of Art, and the 9/11 Memorial Center in the United States.
This solo exhibition, which will continue until the end of February of next year, is open to KAIST members and external visitors free of charge.
2025.05.20 View 42 -
 “For the First Time, We Shared a Meaningful Exchange”: KAIST Develops an AI App for Parents and Minimally Verbal Autistic Children Connect
• KAIST team up with NAVER AI Lab and Dodakim Child Development Center Develop ‘AAcessTalk’, an AI-driven Communication Tool bridging the gap Between Children with Autism and their Parents
• The project earned the prestigious Best Paper Award at the ACM CHI 2025, the Premier International Conference in Human-Computer Interaction
• Families share heartwarming stories of breakthrough communication and newfound understanding.
< Photo 1. (From left) Professor Hwajung Hong and Doctoral candidate Dasom Choi of the Department of Industrial Design with SoHyun Park and Young-Ho Kim of Naver Cloud AI Lab >
For many families of minimally verbal autistic (MVA) children, communication often feels like an uphill battle. But now, thanks to a new AI-powered app developed by researchers at KAIST in collaboration with NAVER AI Lab and Dodakim Child Development Center, parents are finally experiencing moments of genuine connection with their children.
On the 16th, the KAIST (President Kwang Hyung Lee) research team, led by Professor Hwajung Hong of the Department of Industrial Design, announced the development of ‘AAcessTalk,’ an artificial intelligence (AI)-based communication tool that enables genuine communication between children with autism and their parents.
This research was recognized for its human-centered AI approach and received international attention, earning the Best Paper Award at the ACM CHI 2025*, an international conference held in Yokohama, Japan.*ACM CHI (ACM Conference on Human Factors in Computing Systems) 2025: One of the world's most prestigious academic conference in the field of Human-Computer Interaction (HCI).
This year, approximately 1,200 papers were selected out of about 5,000 submissions, with the Best Paper Award given to only the top 1%. The conference, which drew over 5,000 researchers, was the largest in its history, reflecting the growing interest in ‘Human-AI Interaction.’
Called AACessTalk, the app offers personalized vocabulary cards tailored to each child’s interests and context, while guiding parents through conversations with customized prompts. This creates a space where children’s voices can finally be heard—and where parents and children can connect on a deeper level.
Traditional augmentative and alternative communication (AAC) tools have relied heavily on fixed card systems that often fail to capture the subtle emotions and shifting interests of children with autism. AACessTalk breaks new ground by integrating AI technology that adapts in real time to the child’s mood and environment.
< Figure. Schematics of AACessTalk system. It provides personalized vocabulary cards for children with autism and context-based conversation guides for parents to focus on practical communication. Large ‘Turn Pass Button’ is placed at the child’s side to allow the child to lead the conversation. >
Among its standout features is a large ‘Turn Pass Button’ that gives children control over when to start or end conversations—allowing them to lead with agency. Another feature, the “What about Mom/Dad?” button, encourages children to ask about their parents’ thoughts, fostering mutual engagement in dialogue, something many children had never done before.
One parent shared, “For the first time, we shared a meaningful exchange.” Such stories were common among the 11 families who participated in a two-week pilot study, where children used the app to take more initiative in conversations and parents discovered new layers of their children’s language abilities.
Parents also reported moments of surprise and joy when their children used unexpected words or took the lead in conversations, breaking free from repetitive patterns. “I was amazed when my child used a word I hadn’t heard before. It helped me understand them in a whole new way,” recalled one caregiver.
Professor Hwajung Hong, who led the research at KAIST’s Department of Industrial Design, emphasized the importance of empowering children to express their own voices. “This study shows that AI can be more than a communication aid—it can be a bridge to genuine connection and understanding within families,” she said.
Looking ahead, the team plans to refine and expand human-centered AI technologies that honor neurodiversity, with a focus on bringing practical solutions to socially vulnerable groups and enriching user experiences.
This research is the result of KAIST Department of Industrial Design doctoral student Dasom Choi's internship at NAVER AI Lab.* Thesis Title: AACessTalk: Fostering Communication between Minimally Verbal Autistic Children and Parents with Contextual Guidance and Card Recommendation* DOI: 10.1145/3706598.3713792* Main Author Information: Dasom Choi (KAIST, NAVER AI Lab, First Author), SoHyun Park (NAVER AI Lab) , Kyungah Lee (Dodakim Child Development Center), Hwajung Hong (KAIST), and Young-Ho Kim (NAVER AI Lab, Corresponding Author)
This research was supported by the NAVER AI Lab internship program and grants from the National Research Foundation of Korea: the Doctoral Student Research Encouragement Grant (NRF-2024S1A5B5A19043580) and the Mid-Career Researcher Support Program for the Development of a Generative AI-Based Augmentative and Alternative Communication System for Autism Spectrum Disorder (RS-2024-00458557).
2025.05.19 View 334
“For the First Time, We Shared a Meaningful Exchange”: KAIST Develops an AI App for Parents and Minimally Verbal Autistic Children Connect
• KAIST team up with NAVER AI Lab and Dodakim Child Development Center Develop ‘AAcessTalk’, an AI-driven Communication Tool bridging the gap Between Children with Autism and their Parents
• The project earned the prestigious Best Paper Award at the ACM CHI 2025, the Premier International Conference in Human-Computer Interaction
• Families share heartwarming stories of breakthrough communication and newfound understanding.
< Photo 1. (From left) Professor Hwajung Hong and Doctoral candidate Dasom Choi of the Department of Industrial Design with SoHyun Park and Young-Ho Kim of Naver Cloud AI Lab >
For many families of minimally verbal autistic (MVA) children, communication often feels like an uphill battle. But now, thanks to a new AI-powered app developed by researchers at KAIST in collaboration with NAVER AI Lab and Dodakim Child Development Center, parents are finally experiencing moments of genuine connection with their children.
On the 16th, the KAIST (President Kwang Hyung Lee) research team, led by Professor Hwajung Hong of the Department of Industrial Design, announced the development of ‘AAcessTalk,’ an artificial intelligence (AI)-based communication tool that enables genuine communication between children with autism and their parents.
This research was recognized for its human-centered AI approach and received international attention, earning the Best Paper Award at the ACM CHI 2025*, an international conference held in Yokohama, Japan.*ACM CHI (ACM Conference on Human Factors in Computing Systems) 2025: One of the world's most prestigious academic conference in the field of Human-Computer Interaction (HCI).
This year, approximately 1,200 papers were selected out of about 5,000 submissions, with the Best Paper Award given to only the top 1%. The conference, which drew over 5,000 researchers, was the largest in its history, reflecting the growing interest in ‘Human-AI Interaction.’
Called AACessTalk, the app offers personalized vocabulary cards tailored to each child’s interests and context, while guiding parents through conversations with customized prompts. This creates a space where children’s voices can finally be heard—and where parents and children can connect on a deeper level.
Traditional augmentative and alternative communication (AAC) tools have relied heavily on fixed card systems that often fail to capture the subtle emotions and shifting interests of children with autism. AACessTalk breaks new ground by integrating AI technology that adapts in real time to the child’s mood and environment.
< Figure. Schematics of AACessTalk system. It provides personalized vocabulary cards for children with autism and context-based conversation guides for parents to focus on practical communication. Large ‘Turn Pass Button’ is placed at the child’s side to allow the child to lead the conversation. >
Among its standout features is a large ‘Turn Pass Button’ that gives children control over when to start or end conversations—allowing them to lead with agency. Another feature, the “What about Mom/Dad?” button, encourages children to ask about their parents’ thoughts, fostering mutual engagement in dialogue, something many children had never done before.
One parent shared, “For the first time, we shared a meaningful exchange.” Such stories were common among the 11 families who participated in a two-week pilot study, where children used the app to take more initiative in conversations and parents discovered new layers of their children’s language abilities.
Parents also reported moments of surprise and joy when their children used unexpected words or took the lead in conversations, breaking free from repetitive patterns. “I was amazed when my child used a word I hadn’t heard before. It helped me understand them in a whole new way,” recalled one caregiver.
Professor Hwajung Hong, who led the research at KAIST’s Department of Industrial Design, emphasized the importance of empowering children to express their own voices. “This study shows that AI can be more than a communication aid—it can be a bridge to genuine connection and understanding within families,” she said.
Looking ahead, the team plans to refine and expand human-centered AI technologies that honor neurodiversity, with a focus on bringing practical solutions to socially vulnerable groups and enriching user experiences.
This research is the result of KAIST Department of Industrial Design doctoral student Dasom Choi's internship at NAVER AI Lab.* Thesis Title: AACessTalk: Fostering Communication between Minimally Verbal Autistic Children and Parents with Contextual Guidance and Card Recommendation* DOI: 10.1145/3706598.3713792* Main Author Information: Dasom Choi (KAIST, NAVER AI Lab, First Author), SoHyun Park (NAVER AI Lab) , Kyungah Lee (Dodakim Child Development Center), Hwajung Hong (KAIST), and Young-Ho Kim (NAVER AI Lab, Corresponding Author)
This research was supported by the NAVER AI Lab internship program and grants from the National Research Foundation of Korea: the Doctoral Student Research Encouragement Grant (NRF-2024S1A5B5A19043580) and the Mid-Career Researcher Support Program for the Development of a Generative AI-Based Augmentative and Alternative Communication System for Autism Spectrum Disorder (RS-2024-00458557).
2025.05.19 View 334 -
 KAIST Discovers Protein Switch that Turns Anti-Viral Immune Response On and Off
Even after the COVID-19 pandemic, various new infectious diseases continue to emerge, posing ongoing viral threats that demand robust and sustained immune defenses. However, excessive immune reactions can also harm body tissues, causing significant health issues. KAIST and an international research team have discovered a critical protein that acts as a 'switch' regulating immune responses to viruses. This breakthrough is expected to lay the groundwork for future infectious disease responses and autoimmune disease treatment strategies.
KAIST (President Kwang-Hyung Lee) announced on May 14 that a joint research team led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering at KAIST and Professor Seunghee Cha from University of Florida has discovered the mechanism by which double-stranded RNA derived from mitochondria amplifies immune responses. They identified the protein SLIRP as an 'immune switch' that regulates this process, playing a crucial role in both viral infections and autoimmune diseases.
< (From left) Master's candidate Yewon Yang, Professor Yoosik Kim and Ph.D. candidate Doyeong Ku of the Department of Chemical and Biomolecular Engineering >
Autoimmune diseases arise when the immune system fails to differentiate between external pathogens and the body's own molecules, leading to self-directed attacks. Despite extensive research, the precise causes of excessive inflammatory conditions like Sjögren’s syndrome and systemic lupus erythematosus remain unclear, and effective treatments are still limited.
To uncover the molecular mechanisms driving immune hyperactivation and to identify potential regulatory factors, the research team led by Professor Yoosik Kim focused on mitochondrial double-stranded RNA (mt-dsRNA), a genetic immunogenic material produced within cellular organelles. Since mt-dsRNA structurally resembles viral RNA, it can mistakenly trigger immune responses even in the absence of an actual viral infection.
The team discovered that SLIRP, a key regulator of mt-dsRNA, amplifies immune responses by stabilizing the RNA. They confirmed that SLIRP expression increases in experimental models simulating the tissues of autoimmune disease patients and viral infections. Conversely, suppressing SLIRP significantly reduced the immune response, underscoring its role as a critical factor in immune amplification.
This study also demonstrated the dual function of SLIRP in different contexts. In cells infected with human beta coronavirus OC43 and encephalomyocarditis virus (EMCV), SLIRP suppression led to reduced antiviral responses and increased viral replication. Meanwhile, in the blood and salivary gland cells of Sjögren’s syndrome patients, where both SLIRP and mt-dsRNA levels were elevated, suppressing SLIRP alleviated the abnormal immune response.
These findings highlight SLIRP as a key molecular switch that regulates immune responses in both infections and autoimmune diseases.
< Figure 1. Schematic diagram of antiviral signal amplification by SLIRP: SLIRP-based mt-dsRNA induction, cytoplasmic accumulation, and strong interferon response induction by positive feedback of immune response activation. Confirmation of the immune regulatory function of SLIRP in defense against autoimmune diseases Sjögren's syndrome, coronavirus, and encephalomyocarditis virus infection. >
Professor Yoosik Kim remarked, "Through this study, we have identified SLIRP as a crucial protein that drives immune amplification via mt-dsRNAs. Given its dual role in autoimmune diseases and viral infections, SLIRP presents a promising target for immune regulation therapies across various inflammatory disease contexts."
The study, with Ph.D. student Do-Young Ku (first author) and M.S. student Ye-Won Yang (second author) from the Department of Chemical and Biomolecular Engineering at KAIST as primary contributors, was published online in the journal Cell Reports on April 19, 2025.
※ Paper title: SLIRP amplifies antiviral signaling via positive feedback regulation and contributes to autoimmune diseases※ Main authors: Do-Young Ku (KAIST, first author), Ye-Won Yang (KAIST, second author), Seunghee Cha (University of Florida, corresponding author), Yoosik Kim (KAIST, corresponding author)
This study was supported by the Ministry of Health and Welfare's Public Health Technology Research Program and the National Institutes of Health (NIH) through Research Project (R01) funding.
2025.05.14 View 451
KAIST Discovers Protein Switch that Turns Anti-Viral Immune Response On and Off
Even after the COVID-19 pandemic, various new infectious diseases continue to emerge, posing ongoing viral threats that demand robust and sustained immune defenses. However, excessive immune reactions can also harm body tissues, causing significant health issues. KAIST and an international research team have discovered a critical protein that acts as a 'switch' regulating immune responses to viruses. This breakthrough is expected to lay the groundwork for future infectious disease responses and autoimmune disease treatment strategies.
KAIST (President Kwang-Hyung Lee) announced on May 14 that a joint research team led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering at KAIST and Professor Seunghee Cha from University of Florida has discovered the mechanism by which double-stranded RNA derived from mitochondria amplifies immune responses. They identified the protein SLIRP as an 'immune switch' that regulates this process, playing a crucial role in both viral infections and autoimmune diseases.
< (From left) Master's candidate Yewon Yang, Professor Yoosik Kim and Ph.D. candidate Doyeong Ku of the Department of Chemical and Biomolecular Engineering >
Autoimmune diseases arise when the immune system fails to differentiate between external pathogens and the body's own molecules, leading to self-directed attacks. Despite extensive research, the precise causes of excessive inflammatory conditions like Sjögren’s syndrome and systemic lupus erythematosus remain unclear, and effective treatments are still limited.
To uncover the molecular mechanisms driving immune hyperactivation and to identify potential regulatory factors, the research team led by Professor Yoosik Kim focused on mitochondrial double-stranded RNA (mt-dsRNA), a genetic immunogenic material produced within cellular organelles. Since mt-dsRNA structurally resembles viral RNA, it can mistakenly trigger immune responses even in the absence of an actual viral infection.
The team discovered that SLIRP, a key regulator of mt-dsRNA, amplifies immune responses by stabilizing the RNA. They confirmed that SLIRP expression increases in experimental models simulating the tissues of autoimmune disease patients and viral infections. Conversely, suppressing SLIRP significantly reduced the immune response, underscoring its role as a critical factor in immune amplification.
This study also demonstrated the dual function of SLIRP in different contexts. In cells infected with human beta coronavirus OC43 and encephalomyocarditis virus (EMCV), SLIRP suppression led to reduced antiviral responses and increased viral replication. Meanwhile, in the blood and salivary gland cells of Sjögren’s syndrome patients, where both SLIRP and mt-dsRNA levels were elevated, suppressing SLIRP alleviated the abnormal immune response.
These findings highlight SLIRP as a key molecular switch that regulates immune responses in both infections and autoimmune diseases.
< Figure 1. Schematic diagram of antiviral signal amplification by SLIRP: SLIRP-based mt-dsRNA induction, cytoplasmic accumulation, and strong interferon response induction by positive feedback of immune response activation. Confirmation of the immune regulatory function of SLIRP in defense against autoimmune diseases Sjögren's syndrome, coronavirus, and encephalomyocarditis virus infection. >
Professor Yoosik Kim remarked, "Through this study, we have identified SLIRP as a crucial protein that drives immune amplification via mt-dsRNAs. Given its dual role in autoimmune diseases and viral infections, SLIRP presents a promising target for immune regulation therapies across various inflammatory disease contexts."
The study, with Ph.D. student Do-Young Ku (first author) and M.S. student Ye-Won Yang (second author) from the Department of Chemical and Biomolecular Engineering at KAIST as primary contributors, was published online in the journal Cell Reports on April 19, 2025.
※ Paper title: SLIRP amplifies antiviral signaling via positive feedback regulation and contributes to autoimmune diseases※ Main authors: Do-Young Ku (KAIST, first author), Ye-Won Yang (KAIST, second author), Seunghee Cha (University of Florida, corresponding author), Yoosik Kim (KAIST, corresponding author)
This study was supported by the Ministry of Health and Welfare's Public Health Technology Research Program and the National Institutes of Health (NIH) through Research Project (R01) funding.
2025.05.14 View 451 -
 KAIST Develops Novel Catalyst With 100-Fold Platinum Efficiency
Propylene, a key building block used in producing plastics, textiles, automotive components, and electronics, is essential to the petrochemical industry. A KAIST research team has developed a novel catalyst that dramatically enhances the efficiency of propylene production while significantly reducing costs.
< Photo. Professor Minkee Choi (left), and Ph.D. Candidate Susung Lee (right) of the Department of Chemical and Biomolecular Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 12th of May that a research group led by Professor Minkee Choi from the Department of Chemical and Biomolecular Engineering has successfully developed a new catalyst using inexpensive metals—gallium (Ga) and alumina (Al₂O₃)—with only a trace amount of platinum (100 ppm, or 0.01%). Remarkably, this new catalyst outperforms conventional industrial catalysts that use high concentrations of platinum (10,000 ppm).
Propylene is commonly produced through the propane dehydrogenation (PDH) process, which removes hydrogen from propane. Platinum has long been used as a catalyst in PDH due to its high efficiency in breaking carbon-hydrogen bonds and facilitating hydrogen removal. However, platinum is costly and suffers from performance degradation over repeated use.
To address this, the KAIST team engineered a catalyst that incorporates only a minimal amount of platinum, relying on gallium and alumina as the primary components.
< Figure 1. Schematic diagram showing the catalytic cooperation between gallium (Ga) and platinum (Pt) >
The core mechanism of the catalyst involves a cooperative function between the metals: gallium activates the C–H bond in propane to produce propylene, while platinum bonds the residual hydrogen atoms on the surface to form hydrogen gas (H₂), which is then released. This division of roles allows for high catalytic efficiency despite the drastic reduction in platinum content.
The researchers identified an optimal platinum-to-gallium ratio that delivered peak performance and provided a scientific rationale and quantitative metrics to predict this ideal composition.
Additionally, the team addressed a major limitation of traditional platinum catalysts: sintering—the agglomeration of platinum particles during repeated use, which causes performance loss. By adding a small amount of cerium (Ce), the researchers successfully suppressed this aggregation. As a result, the new catalyst maintained stable performance even after more than 20 reaction-regeneration cycles.
< Figure 2. Performance comparison of KAIST's newly developed catalyst (100 ppm platinum) and existing commercial platinum catalyst (10,000 ppm platinum) >
Professor Choi stated, “This research demonstrates the possibility of reducing platinum usage to 1/100th of current levels without compromising, and even enhancing, performance. It presents significant economic and environmental advantages, including lower catalyst costs, extended replacement intervals, and reduced catalyst waste.”
He added, “We are planning to evaluate this technology for large-scale process demonstration and commercialization. If adopted in industry, it could greatly improve the economic viability and efficiency of propylene production.”
The study was led by Professor Minkee Choi as corresponding author, with Ph.D. candidate Susung Lee as the first author. The findings were published in the Journal of the American Chemical Society (JACS), a leading journal in chemistry and chemical engineering, on February 13.※ Paper title: Ideal Bifunctional Catalysis for Propane Dehydrogenation over Pt-Promoted Gallia-Alumina and Minimized Use of Precious Elements※ DOI: https://pubs.acs.org/doi/10.1021/jacs.4c13787
The research was supported by the National Research Foundation of Korea and Hanwha Solutions Corporation.
2025.05.12 View 181
KAIST Develops Novel Catalyst With 100-Fold Platinum Efficiency
Propylene, a key building block used in producing plastics, textiles, automotive components, and electronics, is essential to the petrochemical industry. A KAIST research team has developed a novel catalyst that dramatically enhances the efficiency of propylene production while significantly reducing costs.
< Photo. Professor Minkee Choi (left), and Ph.D. Candidate Susung Lee (right) of the Department of Chemical and Biomolecular Engineering >
KAIST (represented by President Kwang-Hyung Lee) announced on the 12th of May that a research group led by Professor Minkee Choi from the Department of Chemical and Biomolecular Engineering has successfully developed a new catalyst using inexpensive metals—gallium (Ga) and alumina (Al₂O₃)—with only a trace amount of platinum (100 ppm, or 0.01%). Remarkably, this new catalyst outperforms conventional industrial catalysts that use high concentrations of platinum (10,000 ppm).
Propylene is commonly produced through the propane dehydrogenation (PDH) process, which removes hydrogen from propane. Platinum has long been used as a catalyst in PDH due to its high efficiency in breaking carbon-hydrogen bonds and facilitating hydrogen removal. However, platinum is costly and suffers from performance degradation over repeated use.
To address this, the KAIST team engineered a catalyst that incorporates only a minimal amount of platinum, relying on gallium and alumina as the primary components.
< Figure 1. Schematic diagram showing the catalytic cooperation between gallium (Ga) and platinum (Pt) >
The core mechanism of the catalyst involves a cooperative function between the metals: gallium activates the C–H bond in propane to produce propylene, while platinum bonds the residual hydrogen atoms on the surface to form hydrogen gas (H₂), which is then released. This division of roles allows for high catalytic efficiency despite the drastic reduction in platinum content.
The researchers identified an optimal platinum-to-gallium ratio that delivered peak performance and provided a scientific rationale and quantitative metrics to predict this ideal composition.
Additionally, the team addressed a major limitation of traditional platinum catalysts: sintering—the agglomeration of platinum particles during repeated use, which causes performance loss. By adding a small amount of cerium (Ce), the researchers successfully suppressed this aggregation. As a result, the new catalyst maintained stable performance even after more than 20 reaction-regeneration cycles.
< Figure 2. Performance comparison of KAIST's newly developed catalyst (100 ppm platinum) and existing commercial platinum catalyst (10,000 ppm platinum) >
Professor Choi stated, “This research demonstrates the possibility of reducing platinum usage to 1/100th of current levels without compromising, and even enhancing, performance. It presents significant economic and environmental advantages, including lower catalyst costs, extended replacement intervals, and reduced catalyst waste.”
He added, “We are planning to evaluate this technology for large-scale process demonstration and commercialization. If adopted in industry, it could greatly improve the economic viability and efficiency of propylene production.”
The study was led by Professor Minkee Choi as corresponding author, with Ph.D. candidate Susung Lee as the first author. The findings were published in the Journal of the American Chemical Society (JACS), a leading journal in chemistry and chemical engineering, on February 13.※ Paper title: Ideal Bifunctional Catalysis for Propane Dehydrogenation over Pt-Promoted Gallia-Alumina and Minimized Use of Precious Elements※ DOI: https://pubs.acs.org/doi/10.1021/jacs.4c13787
The research was supported by the National Research Foundation of Korea and Hanwha Solutions Corporation.
2025.05.12 View 181 -
 KAIST & CMU Unveils Amuse, a Songwriting AI-Collaborator to Help Create Music
Wouldn't it be great if music creators had someone to brainstorm with, help them when they're stuck, and explore different musical directions together? Researchers of KAIST and Carnegie Mellon University (CMU) have developed AI technology similar to a fellow songwriter who helps create music.
KAIST (President Kwang-Hyung Lee) has developed an AI-based music creation support system, Amuse, by a research team led by Professor Sung-Ju Lee of the School of Electrical Engineering in collaboration with CMU. The research was presented at the ACM Conference on Human Factors in Computing Systems (CHI), one of the world’s top conferences in human-computer interaction, held in Yokohama, Japan from April 26 to May 1. It received the Best Paper Award, given to only the top 1% of all submissions.
< (From left) Professor Chris Donahue of Carnegie Mellon University, Ph.D. Student Yewon Kim and Professor Sung-Ju Lee of the School of Electrical Engineering >
The system developed by Professor Sung-Ju Lee’s research team, Amuse, is an AI-based system that converts various forms of inspiration such as text, images, and audio into harmonic structures (chord progressions) to support composition.
For example, if a user inputs a phrase, image, or sound clip such as “memories of a warm summer beach”, Amuse automatically generates and suggests chord progressions that match the inspiration.
Unlike existing generative AI, Amuse is differentiated in that it respects the user's creative flow and naturally induces creative exploration through an interactive method that allows flexible integration and modification of AI suggestions.
The core technology of the Amuse system is a generation method that blends two approaches: a large language model creates music code based on the user's prompt and inspiration, while another AI model, trained on real music data, filters out awkward or unnatural results using rejection sampling.
< Figure 1. Amuse system configuration. After extracting music keywords from user input, a large language model-based code progression is generated and refined through rejection sampling (left). Code extraction from audio input is also possible (right). The bottom is an example visualizing the chord structure of the generated code. >
The research team conducted a user study targeting actual musicians and evaluated that Amuse has high potential as a creative companion, or a Co-Creative AI, a concept in which people and AI collaborate, rather than having a generative AI simply put together a song.
The paper, in which a Ph.D. student Yewon Kim and Professor Sung-Ju Lee of KAIST School of Electrical and Electronic Engineering and Carnegie Mellon University Professor Chris Donahue participated, demonstrated the potential of creative AI system design in both academia and industry. ※ Paper title: Amuse: Human-AI Collaborative Songwriting with Multimodal Inspirations DOI: https://doi.org/10.1145/3706598.3713818
※ Research demo video: https://youtu.be/udilkRSnftI?si=FNXccC9EjxHOCrm1
※ Research homepage: https://nmsl.kaist.ac.kr/projects/amuse/
Professor Sung-Ju Lee said, “Recent generative AI technology has raised concerns in that it directly imitates copyrighted content, thereby violating the copyright of the creator, or generating results one-way regardless of the creator’s intention. Accordingly, the research team was aware of this trend, paid attention to what the creator actually needs, and focused on designing an AI system centered on the creator.”
He continued, “Amuse is an attempt to explore the possibility of collaboration with AI while maintaining the initiative of the creator, and is expected to be a starting point for suggesting a more creator-friendly direction in the development of music creation tools and generative AI systems in the future.”
This research was conducted with the support of the National Research Foundation of Korea with funding from the government (Ministry of Science and ICT). (RS-2024-00337007)
2025.05.07 View 1454
KAIST & CMU Unveils Amuse, a Songwriting AI-Collaborator to Help Create Music
Wouldn't it be great if music creators had someone to brainstorm with, help them when they're stuck, and explore different musical directions together? Researchers of KAIST and Carnegie Mellon University (CMU) have developed AI technology similar to a fellow songwriter who helps create music.
KAIST (President Kwang-Hyung Lee) has developed an AI-based music creation support system, Amuse, by a research team led by Professor Sung-Ju Lee of the School of Electrical Engineering in collaboration with CMU. The research was presented at the ACM Conference on Human Factors in Computing Systems (CHI), one of the world’s top conferences in human-computer interaction, held in Yokohama, Japan from April 26 to May 1. It received the Best Paper Award, given to only the top 1% of all submissions.
< (From left) Professor Chris Donahue of Carnegie Mellon University, Ph.D. Student Yewon Kim and Professor Sung-Ju Lee of the School of Electrical Engineering >
The system developed by Professor Sung-Ju Lee’s research team, Amuse, is an AI-based system that converts various forms of inspiration such as text, images, and audio into harmonic structures (chord progressions) to support composition.
For example, if a user inputs a phrase, image, or sound clip such as “memories of a warm summer beach”, Amuse automatically generates and suggests chord progressions that match the inspiration.
Unlike existing generative AI, Amuse is differentiated in that it respects the user's creative flow and naturally induces creative exploration through an interactive method that allows flexible integration and modification of AI suggestions.
The core technology of the Amuse system is a generation method that blends two approaches: a large language model creates music code based on the user's prompt and inspiration, while another AI model, trained on real music data, filters out awkward or unnatural results using rejection sampling.
< Figure 1. Amuse system configuration. After extracting music keywords from user input, a large language model-based code progression is generated and refined through rejection sampling (left). Code extraction from audio input is also possible (right). The bottom is an example visualizing the chord structure of the generated code. >
The research team conducted a user study targeting actual musicians and evaluated that Amuse has high potential as a creative companion, or a Co-Creative AI, a concept in which people and AI collaborate, rather than having a generative AI simply put together a song.
The paper, in which a Ph.D. student Yewon Kim and Professor Sung-Ju Lee of KAIST School of Electrical and Electronic Engineering and Carnegie Mellon University Professor Chris Donahue participated, demonstrated the potential of creative AI system design in both academia and industry. ※ Paper title: Amuse: Human-AI Collaborative Songwriting with Multimodal Inspirations DOI: https://doi.org/10.1145/3706598.3713818
※ Research demo video: https://youtu.be/udilkRSnftI?si=FNXccC9EjxHOCrm1
※ Research homepage: https://nmsl.kaist.ac.kr/projects/amuse/
Professor Sung-Ju Lee said, “Recent generative AI technology has raised concerns in that it directly imitates copyrighted content, thereby violating the copyright of the creator, or generating results one-way regardless of the creator’s intention. Accordingly, the research team was aware of this trend, paid attention to what the creator actually needs, and focused on designing an AI system centered on the creator.”
He continued, “Amuse is an attempt to explore the possibility of collaboration with AI while maintaining the initiative of the creator, and is expected to be a starting point for suggesting a more creator-friendly direction in the development of music creation tools and generative AI systems in the future.”
This research was conducted with the support of the National Research Foundation of Korea with funding from the government (Ministry of Science and ICT). (RS-2024-00337007)
2025.05.07 View 1454 -
 KAIST Art Museum Showcases the Works of Van Gogh, Cy Twombly, and More at "The Vault of Masterpieces"
KAIST (President Kwang Hyung Lee) opened a special exhibition, "The Vault of Masterpieces", featuring the architects of the Gallerist Hong Gyu Shin, who is active in New York, on April 29th.
Since its opening in December 2024, the KAIST Museum of Art, which has mainly exhibited works from its own collection, has boldly invited internationally renowned Gallerist Shin Hong-gyu to hold its first full-scale special exhibition, displaying a large number of his collections in the center of the campus.
This exhibition will feature a variety of artifacts from artists who are looking for a society that includes the 18th century artist Tanksuis Boucher, the 19th century master Vincent van Gogh’s “Head of a Peasant (1885)”, the 20th century master of the orthodoxy Saibli, and Joan Miró’s friend Carlarena, a forgotten figure in history who has been brought to life by Gallerist Shin.
< Photo 1. A space where the works and props of the new collection are combined is recreated in the exhibition hall. ⓒ Shin Gallery >
Shin, who majored in ceramics and restoration at the University of Delaware, is a gallerist, curator, and collector of paintings who has embraced the world of space and artifacts.
Shin has been trading, respecting, and exhibiting artifacts ranging from the 18th century to the moderncontemporary, and has been a part of the global art scene since his youth in 1990.
So far, he has put on 150 exhibitions and has participated in over 300 events with members of the National Assembly, Watertan, Treatment, Reina Commission, Guggenheim, Whitney, New York Anne, Kunstmuseum Basel, Van Gogh Foundation, Biennale, etc. This shows well how much trust Shin’s vision and movement are receiving in the international field.
Shin said, “This 'Vault of Masterpieces' exhibition is not just a place where works of art stay, but a place where conversations flow beyond time and space. In this world where art becomes a question, empathy, and a self-portrait that constantly changes its appearance, we will feel a life living with art, and if this exhibition has left a little trembling in someone's heart, I am happy enough with that alone."
< Photo 2. Gallerist Hong-Gyu Shin's lecture on the topic of how Van Gogh's paintings came to my hands >
Hyeon-Jeong Suk, the director of KAIST Art Museum and a professor of KAIST Department of Industrial Design said, “It is a once-in-a-lifetime opportunity to comfortably experience the latest collection trends of the New York art world here at the KAIST Museum of Art, and you will also be able to experience a unique exhibition composition that reconstructed the living room of Mr. Hong Gyu Shin residence as is.”
President Kwang-Hyung Lee said, “Despite being a new museum that has only been open for four months, we are very grateful to Hong Gyu Shin entrusting the works of masters such as Vincent van Gogh. The Vault will be an unforgettable exhibition for the members of KAIST and the community at large.”
KAIST and the Art Museum hosted a lecture by Gallerist Hong Gyu Shin, "How I got my first Van Gogh" on the 29th, and the opening ceremony of the Vault of Masterpieces Exhibition with invited guests.
The general public can visit from the 30th of April to the 29th of August, and the admission is free of charge on weekdays from 10 a.m. to 5 p.m.
< Photo 3. Opening ceremony for the Exhibition of the Vault of Masterpieces >
2025.04.30 View 1176
KAIST Art Museum Showcases the Works of Van Gogh, Cy Twombly, and More at "The Vault of Masterpieces"
KAIST (President Kwang Hyung Lee) opened a special exhibition, "The Vault of Masterpieces", featuring the architects of the Gallerist Hong Gyu Shin, who is active in New York, on April 29th.
Since its opening in December 2024, the KAIST Museum of Art, which has mainly exhibited works from its own collection, has boldly invited internationally renowned Gallerist Shin Hong-gyu to hold its first full-scale special exhibition, displaying a large number of his collections in the center of the campus.
This exhibition will feature a variety of artifacts from artists who are looking for a society that includes the 18th century artist Tanksuis Boucher, the 19th century master Vincent van Gogh’s “Head of a Peasant (1885)”, the 20th century master of the orthodoxy Saibli, and Joan Miró’s friend Carlarena, a forgotten figure in history who has been brought to life by Gallerist Shin.
< Photo 1. A space where the works and props of the new collection are combined is recreated in the exhibition hall. ⓒ Shin Gallery >
Shin, who majored in ceramics and restoration at the University of Delaware, is a gallerist, curator, and collector of paintings who has embraced the world of space and artifacts.
Shin has been trading, respecting, and exhibiting artifacts ranging from the 18th century to the moderncontemporary, and has been a part of the global art scene since his youth in 1990.
So far, he has put on 150 exhibitions and has participated in over 300 events with members of the National Assembly, Watertan, Treatment, Reina Commission, Guggenheim, Whitney, New York Anne, Kunstmuseum Basel, Van Gogh Foundation, Biennale, etc. This shows well how much trust Shin’s vision and movement are receiving in the international field.
Shin said, “This 'Vault of Masterpieces' exhibition is not just a place where works of art stay, but a place where conversations flow beyond time and space. In this world where art becomes a question, empathy, and a self-portrait that constantly changes its appearance, we will feel a life living with art, and if this exhibition has left a little trembling in someone's heart, I am happy enough with that alone."
< Photo 2. Gallerist Hong-Gyu Shin's lecture on the topic of how Van Gogh's paintings came to my hands >
Hyeon-Jeong Suk, the director of KAIST Art Museum and a professor of KAIST Department of Industrial Design said, “It is a once-in-a-lifetime opportunity to comfortably experience the latest collection trends of the New York art world here at the KAIST Museum of Art, and you will also be able to experience a unique exhibition composition that reconstructed the living room of Mr. Hong Gyu Shin residence as is.”
President Kwang-Hyung Lee said, “Despite being a new museum that has only been open for four months, we are very grateful to Hong Gyu Shin entrusting the works of masters such as Vincent van Gogh. The Vault will be an unforgettable exhibition for the members of KAIST and the community at large.”
KAIST and the Art Museum hosted a lecture by Gallerist Hong Gyu Shin, "How I got my first Van Gogh" on the 29th, and the opening ceremony of the Vault of Masterpieces Exhibition with invited guests.
The general public can visit from the 30th of April to the 29th of August, and the admission is free of charge on weekdays from 10 a.m. to 5 p.m.
< Photo 3. Opening ceremony for the Exhibition of the Vault of Masterpieces >
2025.04.30 View 1176 -
 KAIST, Galaxy Corporation Hold Signboard Ceremony for ‘AI Entertech Research Center’
KAIST (President Kwang-Hyung Lee) announced on the 9th that it will hold a signboard ceremony for the establishment of the ‘AI Entertech Research Center’ with the artificial intelligence entertech company, Galaxy Corporation (CEO Yong-ho Choi) at the main campus of KAIST.
< (Galaxy Corporation, from center to the left) CEO Yongho Choi, Director Hyunjung Kim and related persons / (KAIST, from center to the right) Professor SeungSeob Lee of the Department of Mechanical Engineering, Provost and Executive Vice President Gyun Min Lee, Dean Jung Kim of the Department of Mechanical Engineering and Professor Yong Jin Yoon of the same department >
This collaboration is a part of KAIST’s art convergence research strategy and is an extension of its efforts to lead future K-Culture through the development of creative cultural content based on science and technology. Beyond simple technological development, KAIST has been continuously implementing the convergence model of ‘Tech-Art’ that expands the horizon of the content industry through the fusion of emotional technology and cultural imagination.
Previously, KAIST established the ‘Sumi Jo Performing Arts Research Center’ in collaboration with world-renowned soprano Sumi Jo, a visiting professor, and has been leading the convergence research of art and engineering, such as AI-based interactive performance technology and immersive content. The establishment of the ‘AI Entertech Research Center’ this time is being evaluated as a new challenge for the technological expansion of the K-content industry.
In addition, the role of singer G-Dragon (real name Kwon Ji-yong), an artist affiliated with Galaxy Corporation and a visiting professor in the Department of Mechanical Engineering at KAIST, was also a major factor. Since being appointed to KAIST last year, Professor Kwon has been actively promoting the establishment of a research center and soliciting KAIST research projects through his agency to develop the ‘AI Entertech’ field, which fuses entertainment and cutting-edge technology.
< (Galaxy Corporation, from center to the left) CEO Yongho Choi, Director Hyunjung Kim and related persons / (KAIST, from center to the right) Professor SeungSeob Lee of the Department of Mechanical Engineering, Provost and Executive Vice President Gyun Min Lee, Dean Jung Kim of the Department of Mechanical Engineering and Professor Yong Jin Yoon of the same department >
The AI Entertech Research Center is scheduled to officially launch in the third quarter of this year, and this inauguration ceremony was held in line with Professor Kwon Ji-yong’s schedule to visit KAIST. Galaxy Corporation recently had a private meeting with Microsoft (MS) CEO Nadella as the only entertech company, and is actively promoting the globalization of AI entertech. In addition, since last year, it has established a cooperative relationship with KAIST and plans to actively seek the convergence of entertech and technology that transcends time and space through the establishment of a research center.
Professor Kwon Ji-yong will attend the ‘Innovate Korea 2025’ event co-hosted by KAIST, Herald Media Group, and the National Research Council of Science and Technology, held at the KAIST Lyu Keun-Chul Sports Complex in the afternoon of the same day, and will give a special talk on the topic of ‘The Future of AI Entertech.’ In addition to Professor Kwon, Professor SeungSeob Lee of the Department of Mechanical Engineering at KAIST, Professor Sang-gyun Kim of Kyunghee University, and CEO Yong-ho Choi of Galaxy Corporation will also participate in this talk show.
The two organizations signed an MOU last year to jointly research science and technology for the global spread of K-pop, and the establishment of this research center is the first tangible result of this. Once the research center is fully operational, various projects such as the development of an AI-based entertech platform and joint research on global content technology will be promoted.
< A photo of Professor Kwon Ji-yong (right) from at the talk show with KAIST President Kwang-Hyung Lee (left) from the previous year >
Yong-ho Choi, Galaxy Corporation CHO (Chief Happiness Officer), said, “This collaboration is the starting point for providing a completely new entertainment experience to fans around the world by grafting KAIST AI and cutting-edge technologies onto the fandom platform,” and added, “The convergence of AI and entertech is not just technological advancement; it is a driving force for innovation that enriches human life.”
Kwang-Hyung Lee, KAIST President, said, “I am confident that KAIST’s scientific and technological capabilities, combined with Professor Kwon Ji-yong’s global sensibility, will lead the technological evolution of K-culture,” and added, “I hope that KAIST’s spirit of challenge and research DNA will create a new wave in the entertech market.”
Meanwhile, Galaxy Corporation, the agency of Professor G-Dragon Kwon Ji-yong, is an AI entertainment technology company that presents a new paradigm based on IP, media, tech, and entertainment convergence technology. (End)
2025.04.09 View 1430
KAIST, Galaxy Corporation Hold Signboard Ceremony for ‘AI Entertech Research Center’
KAIST (President Kwang-Hyung Lee) announced on the 9th that it will hold a signboard ceremony for the establishment of the ‘AI Entertech Research Center’ with the artificial intelligence entertech company, Galaxy Corporation (CEO Yong-ho Choi) at the main campus of KAIST.
< (Galaxy Corporation, from center to the left) CEO Yongho Choi, Director Hyunjung Kim and related persons / (KAIST, from center to the right) Professor SeungSeob Lee of the Department of Mechanical Engineering, Provost and Executive Vice President Gyun Min Lee, Dean Jung Kim of the Department of Mechanical Engineering and Professor Yong Jin Yoon of the same department >
This collaboration is a part of KAIST’s art convergence research strategy and is an extension of its efforts to lead future K-Culture through the development of creative cultural content based on science and technology. Beyond simple technological development, KAIST has been continuously implementing the convergence model of ‘Tech-Art’ that expands the horizon of the content industry through the fusion of emotional technology and cultural imagination.
Previously, KAIST established the ‘Sumi Jo Performing Arts Research Center’ in collaboration with world-renowned soprano Sumi Jo, a visiting professor, and has been leading the convergence research of art and engineering, such as AI-based interactive performance technology and immersive content. The establishment of the ‘AI Entertech Research Center’ this time is being evaluated as a new challenge for the technological expansion of the K-content industry.
In addition, the role of singer G-Dragon (real name Kwon Ji-yong), an artist affiliated with Galaxy Corporation and a visiting professor in the Department of Mechanical Engineering at KAIST, was also a major factor. Since being appointed to KAIST last year, Professor Kwon has been actively promoting the establishment of a research center and soliciting KAIST research projects through his agency to develop the ‘AI Entertech’ field, which fuses entertainment and cutting-edge technology.
< (Galaxy Corporation, from center to the left) CEO Yongho Choi, Director Hyunjung Kim and related persons / (KAIST, from center to the right) Professor SeungSeob Lee of the Department of Mechanical Engineering, Provost and Executive Vice President Gyun Min Lee, Dean Jung Kim of the Department of Mechanical Engineering and Professor Yong Jin Yoon of the same department >
The AI Entertech Research Center is scheduled to officially launch in the third quarter of this year, and this inauguration ceremony was held in line with Professor Kwon Ji-yong’s schedule to visit KAIST. Galaxy Corporation recently had a private meeting with Microsoft (MS) CEO Nadella as the only entertech company, and is actively promoting the globalization of AI entertech. In addition, since last year, it has established a cooperative relationship with KAIST and plans to actively seek the convergence of entertech and technology that transcends time and space through the establishment of a research center.
Professor Kwon Ji-yong will attend the ‘Innovate Korea 2025’ event co-hosted by KAIST, Herald Media Group, and the National Research Council of Science and Technology, held at the KAIST Lyu Keun-Chul Sports Complex in the afternoon of the same day, and will give a special talk on the topic of ‘The Future of AI Entertech.’ In addition to Professor Kwon, Professor SeungSeob Lee of the Department of Mechanical Engineering at KAIST, Professor Sang-gyun Kim of Kyunghee University, and CEO Yong-ho Choi of Galaxy Corporation will also participate in this talk show.
The two organizations signed an MOU last year to jointly research science and technology for the global spread of K-pop, and the establishment of this research center is the first tangible result of this. Once the research center is fully operational, various projects such as the development of an AI-based entertech platform and joint research on global content technology will be promoted.
< A photo of Professor Kwon Ji-yong (right) from at the talk show with KAIST President Kwang-Hyung Lee (left) from the previous year >
Yong-ho Choi, Galaxy Corporation CHO (Chief Happiness Officer), said, “This collaboration is the starting point for providing a completely new entertainment experience to fans around the world by grafting KAIST AI and cutting-edge technologies onto the fandom platform,” and added, “The convergence of AI and entertech is not just technological advancement; it is a driving force for innovation that enriches human life.”
Kwang-Hyung Lee, KAIST President, said, “I am confident that KAIST’s scientific and technological capabilities, combined with Professor Kwon Ji-yong’s global sensibility, will lead the technological evolution of K-culture,” and added, “I hope that KAIST’s spirit of challenge and research DNA will create a new wave in the entertech market.”
Meanwhile, Galaxy Corporation, the agency of Professor G-Dragon Kwon Ji-yong, is an AI entertainment technology company that presents a new paradigm based on IP, media, tech, and entertainment convergence technology. (End)
2025.04.09 View 1430 -
 KAIST Identifies Master Regulator Blocking Immunotherapy, Paving the Way for a New Lung Cancer Treatment
Immune checkpoint inhibitors, a class of immunotherapies that help immune cells attack cancer more effectively, have revolutionized cancer treatment. However, fewer than 20% of patients respond to these treatments, highlighting the urgent need for new strategies tailored to both responders and non-responders.
KAIST researchers have discovered that 'DEAD-box helicases 54 (DDX54)', a type of RNA-binding protein, is the master regulator that hinders the effectiveness of immunotherapy—opening a new path for lung cancer treatment. This breakthrough technology has been transferred to faculty startup BioRevert Inc., where it is currently being developed as a companion therapeutic and is expected to enter clinical trials by 2028.
< Photo 1. (From left) Researcher Jungeun Lee, Professor Kwang-Hyun Cho and Postdoctoral Researcher Jeong-Ryeol Gong of the Department of Bio and Brain Engineering at KAIST >
KAIST (represented by President Kwang-Hyung Lee) announced on April 8 that a research team led by Professor Kwang-Hyun Cho from the Department of Bio and Brain Engineering had identified DDX54 as a critical factor that determines the immune evasion capacity of lung cancer cells. They demonstrated that suppressing DDX54 enhances immune cell infiltration into tumors and significantly improves the efficacy of immunotherapy.
Immunotherapy using anti-PD-1 or anti-PD-L1 antibodies is considered a powerful approach in cancer treatment. However, its low response rate limits the number of patients who actually benefit.
To identify likely responders, tumor mutational burden (TMB) has recently been approved by the FDA as a key biomarker for immunotherapy. Cancers with high mutation rates are thought to be more responsive to immune checkpoint inhibitors. However, even tumors with high TMB can display an “immune-desert” phenotype—where immune cell infiltration is severely limited—resulting in poor treatment responses.
< Figure 1. DDX54 was identified as the master regulator that induces resistance to immunotherapy by orchestrating suppression of immune cell infiltration through cancer tissues as lung cancer cells become immune-evasive >
Professor Kwang-Hyun Cho's research team compared transcriptome and genome data of lung cancer patients with immune evasion capabilities through gene regulatory network analysis (A) and discovered DDX54, a master regulator that induces resistance to immunotherapy (B-F).
This study is especially significant in that it successfully demonstrated that suppressing DDX54 in immune-desert lung tumors can overcome immunotherapy resistance and improve treatment outcomes.
The team used transcriptomic and genomic data from immune-evasive lung cancer patients and employed systems biology techniques to infer gene regulatory networks. Through this analysis, they identified DDX54 as a central regulator in the immune evasion of lung cancer cells.
In a syngeneic mouse model, the suppression of DDX54 led to significant increases in the infiltration of anti-cancer immune cells such as T cells and NK cells, and greatly improved the response to immunotherapy.
Single-cell transcriptomic and spatial transcriptomic analyses further showed that combination therapy targeting DDX54 promoted the differentiation of T cells and memory T cells that suppress tumors, while reducing the infiltration of regulatory T cells and exhausted T cells that support tumor growth.
< Figure 2. In the syngeneic mouse model made of lung cancer cells, it was confirmed that inhibiting DDX54 reversed the immune-evasion ability of cancer cells and enhanced the sensitivity to anti-PD-1 therapy >
In a syngeneic mouse model made of lung cancer cells exhibiting immunotherapy resistance, the treatment applied after DDX54 inhibition resulted in statistically significant inhibition of lung cancer growth (B-D) and a significant increase in immune cell infiltration into the tumor tissue (E, F).
The mechanism is believed to involve DDX54 suppression inactivating signaling pathways such as JAK-STAT, MYC, and NF-κB, thereby downregulating immune-evasive proteins CD38 and CD47. This also reduced the infiltration of circulating monocytes—which promote tumor development—and promoted the differentiation of M1 macrophages that play anti-tumor roles.
Professor Kwang-Hyun Cho stated, “We have, for the first time, identified a master regulatory factor that enables immune evasion in lung cancer cells. By targeting this factor, we developed a new therapeutic strategy that can induce responsiveness to immunotherapy in previously resistant cancers.”
He added, “The discovery of DDX54—hidden within the complex molecular networks of cancer cells—was made possible through the systematic integration of systems biology, combining IT and BT.”
The study, led by Professor Kwang-Hyun Cho, was published in the Proceedings of the National Academy of Sciences of the United States of America (PNAS) on April 2, 2025, with Jeong-Ryeol Gong being the first author, Jungeun Lee, a co-first author, and Younghyun Han, a co-author of the article.
< Figure 3. Single-cell transcriptome and spatial transcriptome analysis confirmed that knockdown of DDX54 increased immune cell infiltration into cancer tissues >
In a syngeneic mouse model made of lung cancer cells that underwent immunotherapy in combination with DDX54 inhibition, single-cell transcriptome (H-L) and spatial transcriptome (A-G) analysis of immune cells infiltrating inside cancer tissues were performed. As a result, it was confirmed that anticancer immune cells such as T cells, B cells, and NK cells actively infiltrated the core of lung cancer tissues when DDX54 inhibition and immunotherapy were concurrently administered.
(Paper title: “DDX54 downregulation enhances anti-PD1 therapy in immune-desert lung tumors with high tumor mutational burden,” DOI: https://doi.org/10.1073/pnas.2412310122)
This work was supported by the Ministry of Science and ICT and the National Research Foundation of Korea through the Mid-Career Research Program and Basic Research Laboratory Program.
< Figure 4. The identified master regulator DDX54 was confirmed to induce CD38 and CD47 expression through Jak-Stat3, MYC, and NF-κB activation. >
DDX54 activates the Jak-Stat3, MYC, and NF-κB pathways in lung cancer cells to increase CD38 and CD47 expression (A-G). This creates a cancer microenvironment that contributes to cancer development (H) and ultimately induces immune anticancer treatment resistance.
< Figure 5. It was confirmed that an immune-inflamed environment can be created by combining DDX54 inhibition and immune checkpoint inhibitor (ICI) therapy. >
When DDX54 inhibition and ICI therapy are simultaneously administered, the cancer cell characteristics change, the immune evasion ability is restored, and the environment is transformed into an ‘immune-activated’ environment in which immune cells easily infiltrate cancer tissues. This strengthens the anticancer immune response, thereby increasing the sensitivity of immunotherapy even in lung cancer tissues that previously had low responsiveness to immunotherapy.
2025.04.08 View 2164
KAIST Identifies Master Regulator Blocking Immunotherapy, Paving the Way for a New Lung Cancer Treatment
Immune checkpoint inhibitors, a class of immunotherapies that help immune cells attack cancer more effectively, have revolutionized cancer treatment. However, fewer than 20% of patients respond to these treatments, highlighting the urgent need for new strategies tailored to both responders and non-responders.
KAIST researchers have discovered that 'DEAD-box helicases 54 (DDX54)', a type of RNA-binding protein, is the master regulator that hinders the effectiveness of immunotherapy—opening a new path for lung cancer treatment. This breakthrough technology has been transferred to faculty startup BioRevert Inc., where it is currently being developed as a companion therapeutic and is expected to enter clinical trials by 2028.
< Photo 1. (From left) Researcher Jungeun Lee, Professor Kwang-Hyun Cho and Postdoctoral Researcher Jeong-Ryeol Gong of the Department of Bio and Brain Engineering at KAIST >
KAIST (represented by President Kwang-Hyung Lee) announced on April 8 that a research team led by Professor Kwang-Hyun Cho from the Department of Bio and Brain Engineering had identified DDX54 as a critical factor that determines the immune evasion capacity of lung cancer cells. They demonstrated that suppressing DDX54 enhances immune cell infiltration into tumors and significantly improves the efficacy of immunotherapy.
Immunotherapy using anti-PD-1 or anti-PD-L1 antibodies is considered a powerful approach in cancer treatment. However, its low response rate limits the number of patients who actually benefit.
To identify likely responders, tumor mutational burden (TMB) has recently been approved by the FDA as a key biomarker for immunotherapy. Cancers with high mutation rates are thought to be more responsive to immune checkpoint inhibitors. However, even tumors with high TMB can display an “immune-desert” phenotype—where immune cell infiltration is severely limited—resulting in poor treatment responses.
< Figure 1. DDX54 was identified as the master regulator that induces resistance to immunotherapy by orchestrating suppression of immune cell infiltration through cancer tissues as lung cancer cells become immune-evasive >
Professor Kwang-Hyun Cho's research team compared transcriptome and genome data of lung cancer patients with immune evasion capabilities through gene regulatory network analysis (A) and discovered DDX54, a master regulator that induces resistance to immunotherapy (B-F).
This study is especially significant in that it successfully demonstrated that suppressing DDX54 in immune-desert lung tumors can overcome immunotherapy resistance and improve treatment outcomes.
The team used transcriptomic and genomic data from immune-evasive lung cancer patients and employed systems biology techniques to infer gene regulatory networks. Through this analysis, they identified DDX54 as a central regulator in the immune evasion of lung cancer cells.
In a syngeneic mouse model, the suppression of DDX54 led to significant increases in the infiltration of anti-cancer immune cells such as T cells and NK cells, and greatly improved the response to immunotherapy.
Single-cell transcriptomic and spatial transcriptomic analyses further showed that combination therapy targeting DDX54 promoted the differentiation of T cells and memory T cells that suppress tumors, while reducing the infiltration of regulatory T cells and exhausted T cells that support tumor growth.
< Figure 2. In the syngeneic mouse model made of lung cancer cells, it was confirmed that inhibiting DDX54 reversed the immune-evasion ability of cancer cells and enhanced the sensitivity to anti-PD-1 therapy >
In a syngeneic mouse model made of lung cancer cells exhibiting immunotherapy resistance, the treatment applied after DDX54 inhibition resulted in statistically significant inhibition of lung cancer growth (B-D) and a significant increase in immune cell infiltration into the tumor tissue (E, F).
The mechanism is believed to involve DDX54 suppression inactivating signaling pathways such as JAK-STAT, MYC, and NF-κB, thereby downregulating immune-evasive proteins CD38 and CD47. This also reduced the infiltration of circulating monocytes—which promote tumor development—and promoted the differentiation of M1 macrophages that play anti-tumor roles.
Professor Kwang-Hyun Cho stated, “We have, for the first time, identified a master regulatory factor that enables immune evasion in lung cancer cells. By targeting this factor, we developed a new therapeutic strategy that can induce responsiveness to immunotherapy in previously resistant cancers.”
He added, “The discovery of DDX54—hidden within the complex molecular networks of cancer cells—was made possible through the systematic integration of systems biology, combining IT and BT.”
The study, led by Professor Kwang-Hyun Cho, was published in the Proceedings of the National Academy of Sciences of the United States of America (PNAS) on April 2, 2025, with Jeong-Ryeol Gong being the first author, Jungeun Lee, a co-first author, and Younghyun Han, a co-author of the article.
< Figure 3. Single-cell transcriptome and spatial transcriptome analysis confirmed that knockdown of DDX54 increased immune cell infiltration into cancer tissues >
In a syngeneic mouse model made of lung cancer cells that underwent immunotherapy in combination with DDX54 inhibition, single-cell transcriptome (H-L) and spatial transcriptome (A-G) analysis of immune cells infiltrating inside cancer tissues were performed. As a result, it was confirmed that anticancer immune cells such as T cells, B cells, and NK cells actively infiltrated the core of lung cancer tissues when DDX54 inhibition and immunotherapy were concurrently administered.
(Paper title: “DDX54 downregulation enhances anti-PD1 therapy in immune-desert lung tumors with high tumor mutational burden,” DOI: https://doi.org/10.1073/pnas.2412310122)
This work was supported by the Ministry of Science and ICT and the National Research Foundation of Korea through the Mid-Career Research Program and Basic Research Laboratory Program.
< Figure 4. The identified master regulator DDX54 was confirmed to induce CD38 and CD47 expression through Jak-Stat3, MYC, and NF-κB activation. >
DDX54 activates the Jak-Stat3, MYC, and NF-κB pathways in lung cancer cells to increase CD38 and CD47 expression (A-G). This creates a cancer microenvironment that contributes to cancer development (H) and ultimately induces immune anticancer treatment resistance.
< Figure 5. It was confirmed that an immune-inflamed environment can be created by combining DDX54 inhibition and immune checkpoint inhibitor (ICI) therapy. >
When DDX54 inhibition and ICI therapy are simultaneously administered, the cancer cell characteristics change, the immune evasion ability is restored, and the environment is transformed into an ‘immune-activated’ environment in which immune cells easily infiltrate cancer tissues. This strengthens the anticancer immune response, thereby increasing the sensitivity of immunotherapy even in lung cancer tissues that previously had low responsiveness to immunotherapy.
2025.04.08 View 2164 -
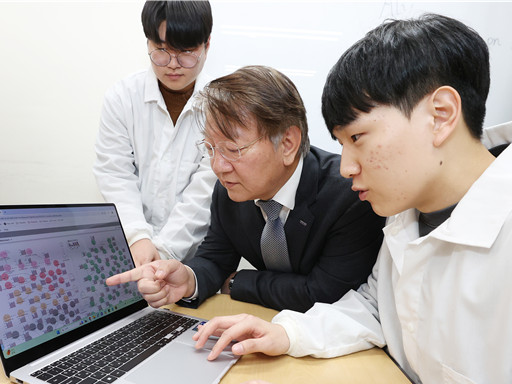 KAIST Accelerates Synthetic Microbe Design by Discovering Novel Enzymes Using AI
< (From left) Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering (top), Hongkeun Ji, PhD candidate of the Department of Chemical and Biomolecular Engineering (top), Ha Rim Kim, PhD candidate of the Department of Chemical and Biomolecular Engineering, and Dr. Gi Bae Kim of the BioProcess Engineering Research Center >
Enzymes are proteins that catalyze biochemical reactions within cells and play a pivotal role in metabolic processes. Accordingly, identifying the functions of novel enzymes is a critical task in the construction of microbial cell factories.
A KAIST research team has leveraged artificial intelligence (AI) to design novel enzymes that do not exist in nature, significantly accelerating microbial cell factory development and boosting the potential for next-generation biotechnological applications such as drug development and biofuel production.
KAIST (represented by President Kwang-Hyung Lee) announced on the 21st of April that Distinguished Professor Sang Yup Lee and his team from the Department of Chemical and Biomolecular Engineering have published a review titled “Enzyme Functional Classification Using Artificial Intelligence,” which outlines the advancement of AI-based enzyme function prediction technologies and analyzes how AI has contributed to the discovery and design of new enzymes.
Professor Lee’s team systematically reviewed the development of enzyme function prediction technologies utilizing machine learning and deep learning, offering a comprehensive analysis.
From sequence similarity-based prediction methods to the integration of convolutional neural networks (CNNs), recurrent neural networks (RNNs), graph neural networks (GNNs), and transformer-based large language models, the paper covers a broad range of AI applications. It analyzes how these technologies extract meaningful information from protein sequences and enhance prediction accuracy.
In particular, enzyme function prediction using deep learning goes beyond simple sequence similarity analysis. By automatically extracting structural and evolutionary features embedded in amino acid sequences, deep learning enables more precise predictions of catalytic functions.
This highlights the unique advantages of AI models compared to traditional bioinformatics approaches.
Moreover, the review suggests that the advancement of generative AI will move future research beyond predicting existing functions to generating entirely new enzymes with functions not found in nature. This shift is expected to profoundly impact the trajectory of biotechnology and synthetic biology.
< Figure 1. Extraction of enzyme characteristics and function prediction using various deep learning structures >
Ha Rim Kim, a Ph.D. candidate and co-first author from the Department of Chemical and Biomolecular Engineering, stated, “AI-based enzyme function prediction and enzyme design are highly important across various fields including metabolic engineering, synthetic biology, and healthcare.”
Distinguished Professor Sang Yup Lee added, “AI-powered enzyme function prediction shows the potential to solve diverse biological problems and will significantly contribute to accelerating research across the entire field.”
The review was published on March 28 in Trends in Biotechnology, a leading biotechnology journal issued by Cell Press.
※ Title: Enzyme Functional Classification Using Artificial Intelligence
※DOI: https://doi.org/10.1016/j.tibtech.2025.03.003
※ Author Information: Ha Rim Kim (KAIST, Co-first author), Hongkeun Ji (KAIST, Co-first author), Gi Bae Kim (KAIST, Third author), Sang Yup Lee (KAIST, Corresponding author)
This research was supported by the Ministry of Science and ICT under the project Development of Core Technologies for Advanced Synthetic Biology to Lead the Bio-Manufacturing Industry (aimed at replacing petroleum-based chemicals), and also by joint support from the Ministry of Science and ICT and the Ministry of Health and Welfare for the project Development of Novel Antibiotic Structures Using Deep Learning-Based Synthetic Biology.
2025.04.07 View 1190
KAIST Accelerates Synthetic Microbe Design by Discovering Novel Enzymes Using AI
< (From left) Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering (top), Hongkeun Ji, PhD candidate of the Department of Chemical and Biomolecular Engineering (top), Ha Rim Kim, PhD candidate of the Department of Chemical and Biomolecular Engineering, and Dr. Gi Bae Kim of the BioProcess Engineering Research Center >
Enzymes are proteins that catalyze biochemical reactions within cells and play a pivotal role in metabolic processes. Accordingly, identifying the functions of novel enzymes is a critical task in the construction of microbial cell factories.
A KAIST research team has leveraged artificial intelligence (AI) to design novel enzymes that do not exist in nature, significantly accelerating microbial cell factory development and boosting the potential for next-generation biotechnological applications such as drug development and biofuel production.
KAIST (represented by President Kwang-Hyung Lee) announced on the 21st of April that Distinguished Professor Sang Yup Lee and his team from the Department of Chemical and Biomolecular Engineering have published a review titled “Enzyme Functional Classification Using Artificial Intelligence,” which outlines the advancement of AI-based enzyme function prediction technologies and analyzes how AI has contributed to the discovery and design of new enzymes.
Professor Lee’s team systematically reviewed the development of enzyme function prediction technologies utilizing machine learning and deep learning, offering a comprehensive analysis.
From sequence similarity-based prediction methods to the integration of convolutional neural networks (CNNs), recurrent neural networks (RNNs), graph neural networks (GNNs), and transformer-based large language models, the paper covers a broad range of AI applications. It analyzes how these technologies extract meaningful information from protein sequences and enhance prediction accuracy.
In particular, enzyme function prediction using deep learning goes beyond simple sequence similarity analysis. By automatically extracting structural and evolutionary features embedded in amino acid sequences, deep learning enables more precise predictions of catalytic functions.
This highlights the unique advantages of AI models compared to traditional bioinformatics approaches.
Moreover, the review suggests that the advancement of generative AI will move future research beyond predicting existing functions to generating entirely new enzymes with functions not found in nature. This shift is expected to profoundly impact the trajectory of biotechnology and synthetic biology.
< Figure 1. Extraction of enzyme characteristics and function prediction using various deep learning structures >
Ha Rim Kim, a Ph.D. candidate and co-first author from the Department of Chemical and Biomolecular Engineering, stated, “AI-based enzyme function prediction and enzyme design are highly important across various fields including metabolic engineering, synthetic biology, and healthcare.”
Distinguished Professor Sang Yup Lee added, “AI-powered enzyme function prediction shows the potential to solve diverse biological problems and will significantly contribute to accelerating research across the entire field.”
The review was published on March 28 in Trends in Biotechnology, a leading biotechnology journal issued by Cell Press.
※ Title: Enzyme Functional Classification Using Artificial Intelligence
※DOI: https://doi.org/10.1016/j.tibtech.2025.03.003
※ Author Information: Ha Rim Kim (KAIST, Co-first author), Hongkeun Ji (KAIST, Co-first author), Gi Bae Kim (KAIST, Third author), Sang Yup Lee (KAIST, Corresponding author)
This research was supported by the Ministry of Science and ICT under the project Development of Core Technologies for Advanced Synthetic Biology to Lead the Bio-Manufacturing Industry (aimed at replacing petroleum-based chemicals), and also by joint support from the Ministry of Science and ICT and the Ministry of Health and Welfare for the project Development of Novel Antibiotic Structures Using Deep Learning-Based Synthetic Biology.
2025.04.07 View 1190 -
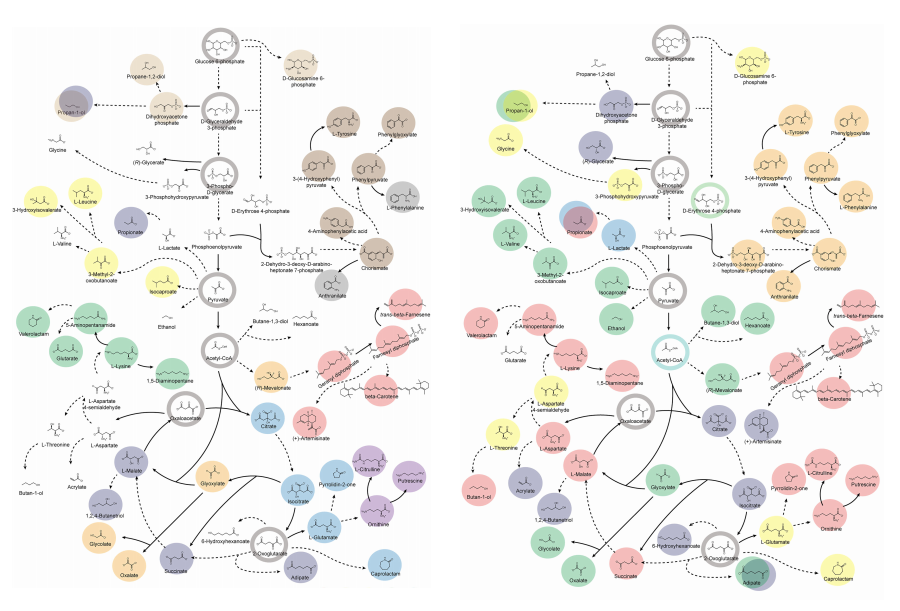 KAIST provides a comprehensive resource on microbial cell factories for sustainable chemical production
In silico analysis of five industrial microorganisms identifies optimal strains and metabolic engineering strategies for producing 235 valuable chemicals
Climate change and the depletion of fossil fuels have raised the global need for sustainable chemical production. In response to these environmental challenges, microbial cell factories are gaining attention as eco-friendly platforms for producing chemicals using renewable resources, while metabolic engineering technologies to enhance these cell factories are becoming crucial tools for maximizing production efficiency. However, difficulties in selecting suitable microbial strains and optimizing complex metabolic pathways continue to pose significant obstacles to practical industrial applications.
KAIST (President Kwang-Hyung Lee) announced on 27th of March that Distinguished Professor Sang Yup Lee’s research team in the Department of Chemical and Biomolecular Engineering comprehensively evaluated the production capabilities of various industrial microbial cell factories using in silico simulations and, based on these findings, identified the most suitable microbial strains for producing specific chemicals as well as optimal metabolic engineering strategies.
Previously, researchers attempted to determine the best strains and efficient metabolic engineering strategies among numerous microbial candidates through extensive biological experiments and meticulous verification processes. However, this approach required substantial time and costs. Recently, the introduction of genome-scale metabolic models (GEMs), which reconstruct the metabolic networks within an organism based on its entire genome information, has enabled systematic analysis of metabolic fluxes via computer simulations. This development offers a new way to overcome limitations of conventional experimental approaches, revolutionizing both strain selection and metabolic pathway design.
Accordingly, Professor Lee’s team at the Department of Chemical and Biomolecular Engineering, KAIST, evaluated the production capabilities of five representative industrial microorganisms—Escherichia coli, Saccharomyces cerevisiae, Bacillus subtilis, Corynebacterium glutamicum, and Pseudomonas putida—for 235 bio-based chemicals. Using GEMs, the researchers calculated both the maximum theoretical yields and the maximum achievable yields under industrial conditions for each chemical, thereby establishing criteria to identify the most suitable strains for each target compound.
< Figure 1. Outline of the strategy for improving microbial cell factories using a genome-scale metabolic model (GEM) >
The team specifically proposed strategies such as introducing heterologous enzyme reactions derived from other organisms and exchanging cofactors used by microbes to expand metabolic pathways. These strategies were shown to increase yields beyond the innate metabolic capacities of the microorganisms, resulting in higher production of industrially important chemicals such as mevalonic acid, propanol, fatty acids, and isoprenoids.
Moreover, by applying a computational approach to analyze metabolic fluxes in silico, the researchers suggested strategies for improving microbial strains to maximize the production of various chemicals. They quantitatively identified the relationships between specific enzyme reactions and target chemical production, as well as the relationships between enzymes and metabolites, determining which enzyme reactions should be up- or down-regulated. Through this, the team presented strategies not only to achieve high theoretical yields but also to maximize actual production capacities.
< Figure 2. Comparison of production routes and maximum yields of useful chemicals using representative industrial microorganisms >
Dr. Gi Bae Kim, the first author of this paper from the KAIST BioProcess Engineering Research Center, explained, “By introducing metabolic pathways derived from other organisms and exchanging cofactors, it is possible to design new microbial cell factories that surpass existing limitations. The strategies presented in this study will play a pivotal role in making microbial-based production processes more economical and efficient.” In addition, Distinguished Professor Sang Yup Lee noted, “This research serves as a key resource in the field of systems metabolic engineering, reducing difficulties in strain selection and pathway design, and enabling more efficient development of microbial cell factories. We expect it to greatly contribute to the future development of technologies for producing various eco-friendly chemicals, such as biofuels, bioplastics, and functional food materials.”
This research was conducted with the support from the Development of platform technologies of microbial cell factories for the next-generation biorefineries project and Development of advanced synthetic biology source technologies for leading the biomanufacturing industry project (Project Leader: Distinguished Professor Sang Yup Lee, KAIST) from National Research Foundation supported by the Korean Ministry of Science and ICT.
2025.03.27 View 1771
KAIST provides a comprehensive resource on microbial cell factories for sustainable chemical production
In silico analysis of five industrial microorganisms identifies optimal strains and metabolic engineering strategies for producing 235 valuable chemicals
Climate change and the depletion of fossil fuels have raised the global need for sustainable chemical production. In response to these environmental challenges, microbial cell factories are gaining attention as eco-friendly platforms for producing chemicals using renewable resources, while metabolic engineering technologies to enhance these cell factories are becoming crucial tools for maximizing production efficiency. However, difficulties in selecting suitable microbial strains and optimizing complex metabolic pathways continue to pose significant obstacles to practical industrial applications.
KAIST (President Kwang-Hyung Lee) announced on 27th of March that Distinguished Professor Sang Yup Lee’s research team in the Department of Chemical and Biomolecular Engineering comprehensively evaluated the production capabilities of various industrial microbial cell factories using in silico simulations and, based on these findings, identified the most suitable microbial strains for producing specific chemicals as well as optimal metabolic engineering strategies.
Previously, researchers attempted to determine the best strains and efficient metabolic engineering strategies among numerous microbial candidates through extensive biological experiments and meticulous verification processes. However, this approach required substantial time and costs. Recently, the introduction of genome-scale metabolic models (GEMs), which reconstruct the metabolic networks within an organism based on its entire genome information, has enabled systematic analysis of metabolic fluxes via computer simulations. This development offers a new way to overcome limitations of conventional experimental approaches, revolutionizing both strain selection and metabolic pathway design.
Accordingly, Professor Lee’s team at the Department of Chemical and Biomolecular Engineering, KAIST, evaluated the production capabilities of five representative industrial microorganisms—Escherichia coli, Saccharomyces cerevisiae, Bacillus subtilis, Corynebacterium glutamicum, and Pseudomonas putida—for 235 bio-based chemicals. Using GEMs, the researchers calculated both the maximum theoretical yields and the maximum achievable yields under industrial conditions for each chemical, thereby establishing criteria to identify the most suitable strains for each target compound.
< Figure 1. Outline of the strategy for improving microbial cell factories using a genome-scale metabolic model (GEM) >
The team specifically proposed strategies such as introducing heterologous enzyme reactions derived from other organisms and exchanging cofactors used by microbes to expand metabolic pathways. These strategies were shown to increase yields beyond the innate metabolic capacities of the microorganisms, resulting in higher production of industrially important chemicals such as mevalonic acid, propanol, fatty acids, and isoprenoids.
Moreover, by applying a computational approach to analyze metabolic fluxes in silico, the researchers suggested strategies for improving microbial strains to maximize the production of various chemicals. They quantitatively identified the relationships between specific enzyme reactions and target chemical production, as well as the relationships between enzymes and metabolites, determining which enzyme reactions should be up- or down-regulated. Through this, the team presented strategies not only to achieve high theoretical yields but also to maximize actual production capacities.
< Figure 2. Comparison of production routes and maximum yields of useful chemicals using representative industrial microorganisms >
Dr. Gi Bae Kim, the first author of this paper from the KAIST BioProcess Engineering Research Center, explained, “By introducing metabolic pathways derived from other organisms and exchanging cofactors, it is possible to design new microbial cell factories that surpass existing limitations. The strategies presented in this study will play a pivotal role in making microbial-based production processes more economical and efficient.” In addition, Distinguished Professor Sang Yup Lee noted, “This research serves as a key resource in the field of systems metabolic engineering, reducing difficulties in strain selection and pathway design, and enabling more efficient development of microbial cell factories. We expect it to greatly contribute to the future development of technologies for producing various eco-friendly chemicals, such as biofuels, bioplastics, and functional food materials.”
This research was conducted with the support from the Development of platform technologies of microbial cell factories for the next-generation biorefineries project and Development of advanced synthetic biology source technologies for leading the biomanufacturing industry project (Project Leader: Distinguished Professor Sang Yup Lee, KAIST) from National Research Foundation supported by the Korean Ministry of Science and ICT.
2025.03.27 View 1771 -
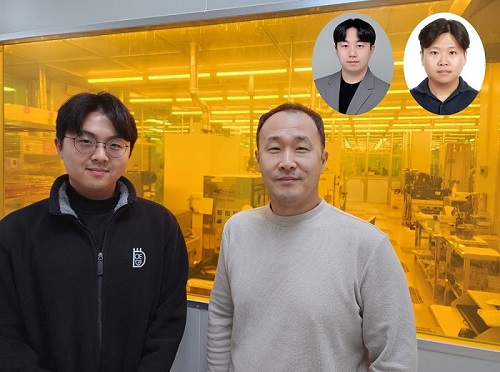 KAIST Innovates Mid-Infrared Photodetectors for Exoplanet Detection, Expanding Applications to Environmental and Medical Fields
NASA’s James Webb Space Telescope (JWST) utilizes mid-infrared spectroscopy to precisely analyze molecular components such as water vapor and sulfur dioxide in exoplanet atmospheres. The key to this analysis, where each molecule exhibits a unique spectral "fingerprint," lies in highly sensitive photodetector technology capable of measuring extremely weak light intensities. Recently, KAIST researchers have developed an innovative photodetector capable of detecting a broad range of mid-infrared spectra, garnering significant attention.
< Photo 1. (from the left) Ph.D. candidate Inki Kim (co-author), Professor SangHyeon Kim (corresponding author), Dr. Joonsup Shim (first author), and Dr. Jinha Lim (co-author) of KAIST School of Electrical Engineering. >
KAIST (represented by President Kwang-Hyung Lee) announced on the 27th of March that a research team led by Professor SangHyeon Kim from the School of Electrical Engineering has developed a mid-infrared photodetector that operates stably at room temperature, marking a major turning point for the commercialization of ultra-compact optical sensors.
The newly developed photodetector utilizes conventional silicon-based CMOS processes, enabling low-cost mass production while maintaining stable operation at room temperature. Notably, the research team successfully demonstrated the real-time detection of carbon dioxide (CO₂) gas using ultra-compact and ultra-thin optical sensors equipped with this photodetector, proving its potential for environmental monitoring and hazardous gas analysis.
Existing mid-infrared photodetectors generally require cooling systems due to high thermal noise at room temperature. These cooling systems increase the size and cost of equipment, making miniaturization and integration into portable devices challenging. Furthermore, conventional mid-infrared photodetectors are incompatible with silicon-based CMOS processes, limiting large-scale production and commercialization.
To address these limitations, the research team developed a waveguide-integrated photodetector using germanium (Ge), a Group IV element like silicon. This approach enables broad-spectrum mid-infrared detection while ensuring stable operation at room temperature.
< Figure 1. Schematic diagram of a room-temperature mid-infrared waveguide-integrated photodetector based on the Ge-on-insulator optical platform proposed in this study (top). Optical microscope image of the integrated photodetector connected with the sensing unit (bottom). >
A waveguide is a structure designed to efficiently guide light along a specific path with minimal loss. To implement various optical functions on a chip (on-chip), the development of waveguide-integrated photodetectors and waveguide-based optical components is essential.
Unlike conventional photodetectors that primarily rely on bandgap absorption principles, this new technology leverages the bolometric effect*, allowing it to detect the entire mid-infrared spectral range. As a result, it can be widely applied to the real-time sensing of various molecular species.
*Bolometric effect: A principle in which light absorption leads to an increase in temperature, causing electrical signals to change accordingly.
The waveguide-integrated mid-infrared photodetector developed by the research team is considered a groundbreaking innovation that overcomes the limitations of existing mid-infrared sensor technologies, including the need for cooling, difficulties in mass production, and high costs.
< Figure 2. Room temperature photoresponse characteristics of the mid-infrared waveguide photodetector proposed in this study (left) and real-time carbon dioxide (CO2) gas sensing results using the photodetector (right). >
This breakthrough technology is expected to be applicable across diverse fields, including environmental monitoring, medical diagnostics, industrial process management, national defense and security, and smart devices. It also paves the way for next-generation mid-infrared sensor advancements.
Professor SangHyeon Kim from KAIST stated, "This research represents a novel approach that overcomes the limitations of existing mid-infrared photodetector technologies and has great potential for practical applications in various fields." He further emphasized, "Since this sensor technology is compatible with CMOS processes, it enables low-cost mass production, making it highly suitable for next-generation environmental monitoring systems and smart manufacturing sites."
< Figure 3. Performance comparison image of a room-temperature mid-infrared waveguide photodetector fabricated with the technology proposed in this study. It achieves the world’s highest performance compared to existing technologies utilizing the Bolometric effect, and is the only solution compatible with CMOS processes. The technology proposed by our research team is characterized by its ability to respond to a wide spectrum of the mid-infrared band without limitations. >
The study, with Dr. Joonsup Shim (currently a postdoctoral researcher at Harvard University) as the first author, was published on March 19, 2025 in the internationally renowned journal Light: Science & Applications (JCR 2.9%, IF=20.6).
(Paper title: “Room-temperature waveguide-integrated photodetector using bolometric effect for mid-infrared spectroscopy applications,” https://doi.org/10.1038/s41377-025-01803-3)
2025.03.27 View 633
KAIST Innovates Mid-Infrared Photodetectors for Exoplanet Detection, Expanding Applications to Environmental and Medical Fields
NASA’s James Webb Space Telescope (JWST) utilizes mid-infrared spectroscopy to precisely analyze molecular components such as water vapor and sulfur dioxide in exoplanet atmospheres. The key to this analysis, where each molecule exhibits a unique spectral "fingerprint," lies in highly sensitive photodetector technology capable of measuring extremely weak light intensities. Recently, KAIST researchers have developed an innovative photodetector capable of detecting a broad range of mid-infrared spectra, garnering significant attention.
< Photo 1. (from the left) Ph.D. candidate Inki Kim (co-author), Professor SangHyeon Kim (corresponding author), Dr. Joonsup Shim (first author), and Dr. Jinha Lim (co-author) of KAIST School of Electrical Engineering. >
KAIST (represented by President Kwang-Hyung Lee) announced on the 27th of March that a research team led by Professor SangHyeon Kim from the School of Electrical Engineering has developed a mid-infrared photodetector that operates stably at room temperature, marking a major turning point for the commercialization of ultra-compact optical sensors.
The newly developed photodetector utilizes conventional silicon-based CMOS processes, enabling low-cost mass production while maintaining stable operation at room temperature. Notably, the research team successfully demonstrated the real-time detection of carbon dioxide (CO₂) gas using ultra-compact and ultra-thin optical sensors equipped with this photodetector, proving its potential for environmental monitoring and hazardous gas analysis.
Existing mid-infrared photodetectors generally require cooling systems due to high thermal noise at room temperature. These cooling systems increase the size and cost of equipment, making miniaturization and integration into portable devices challenging. Furthermore, conventional mid-infrared photodetectors are incompatible with silicon-based CMOS processes, limiting large-scale production and commercialization.
To address these limitations, the research team developed a waveguide-integrated photodetector using germanium (Ge), a Group IV element like silicon. This approach enables broad-spectrum mid-infrared detection while ensuring stable operation at room temperature.
< Figure 1. Schematic diagram of a room-temperature mid-infrared waveguide-integrated photodetector based on the Ge-on-insulator optical platform proposed in this study (top). Optical microscope image of the integrated photodetector connected with the sensing unit (bottom). >
A waveguide is a structure designed to efficiently guide light along a specific path with minimal loss. To implement various optical functions on a chip (on-chip), the development of waveguide-integrated photodetectors and waveguide-based optical components is essential.
Unlike conventional photodetectors that primarily rely on bandgap absorption principles, this new technology leverages the bolometric effect*, allowing it to detect the entire mid-infrared spectral range. As a result, it can be widely applied to the real-time sensing of various molecular species.
*Bolometric effect: A principle in which light absorption leads to an increase in temperature, causing electrical signals to change accordingly.
The waveguide-integrated mid-infrared photodetector developed by the research team is considered a groundbreaking innovation that overcomes the limitations of existing mid-infrared sensor technologies, including the need for cooling, difficulties in mass production, and high costs.
< Figure 2. Room temperature photoresponse characteristics of the mid-infrared waveguide photodetector proposed in this study (left) and real-time carbon dioxide (CO2) gas sensing results using the photodetector (right). >
This breakthrough technology is expected to be applicable across diverse fields, including environmental monitoring, medical diagnostics, industrial process management, national defense and security, and smart devices. It also paves the way for next-generation mid-infrared sensor advancements.
Professor SangHyeon Kim from KAIST stated, "This research represents a novel approach that overcomes the limitations of existing mid-infrared photodetector technologies and has great potential for practical applications in various fields." He further emphasized, "Since this sensor technology is compatible with CMOS processes, it enables low-cost mass production, making it highly suitable for next-generation environmental monitoring systems and smart manufacturing sites."
< Figure 3. Performance comparison image of a room-temperature mid-infrared waveguide photodetector fabricated with the technology proposed in this study. It achieves the world’s highest performance compared to existing technologies utilizing the Bolometric effect, and is the only solution compatible with CMOS processes. The technology proposed by our research team is characterized by its ability to respond to a wide spectrum of the mid-infrared band without limitations. >
The study, with Dr. Joonsup Shim (currently a postdoctoral researcher at Harvard University) as the first author, was published on March 19, 2025 in the internationally renowned journal Light: Science & Applications (JCR 2.9%, IF=20.6).
(Paper title: “Room-temperature waveguide-integrated photodetector using bolometric effect for mid-infrared spectroscopy applications,” https://doi.org/10.1038/s41377-025-01803-3)
2025.03.27 View 633