OT
-
 KAIST Wins CES 2025 Innovation Award, Showcasing Innovative Technologies
KAIST will showcase innovative technologies at the world’s largest technology fair, the Consumer Electronics Show (CES 2025). In addition, KAIST startups VIRNECT Inc., Standard Energy Inc., A2US Inc., and Panmnesia, Inc. won the 2025 CES Innovation Awards.
< Image 1. 3D-Graphical Profile of CES 2025 KAIST Exhibition Booth >
KAIST (President Kwang-Hyung Lee) announced on the 31st that it will operate a 140㎡ standalone booth at CES Eureka Park, which will be held in Las Vegas, USA from January 7th to 10th next year, to showcase KAIST's innovative technologies to global companies and investors.
KAIST startups VIRNECT, Standard Energy, A2US, and Panmnesia, Inc. won the 2025 CES Innovation Awards. ▴VIRNECT won the Innovation Award in the ‘Industrial Equipment and Machinery’ category for ‘VisionX’, an AI-based smart glass for industrial sites; ▴Standard Energy Co., Ltd. won the Innovation Award in the ‘Smart City’ category for developing the world’s first vanadium-ion battery; ▴A2US won the Innovation Award in the ‘Environment & Energy’ category for its portable air purifier that eliminates bacteria, odors, and fine dust in the air with just water droplets; ▴Panmnesia, Inc. won the Innovation Award in the ‘Computer Peripherals and Accessories’ category for its ‘CXL-based GPU Memory Expansion Kit’ that can drastically reduce the cost of building AI infrastructure.
< Image 2. (From left on the top row) VIRNECT, Standard Energy, (From left on the bottom row) A2US, Panmnesia, Inc. >
This exhibition will feature 15 startups that are standing out in cutting-edge technologies such as artificial intelligence (AI), robotics, mobility, and sustainability. In particular, AI-based deep tech startups in various industries such as logistics, architecture, and medicine will take up half of the total, showcasing the companies’ innovative AI technologies.
Polyphenol Factory Co.,Ltd introduces ‘Grabity’, a hair loss shampoo launched domestically, which applies the patented ingredient ‘LiftMax 308™’ that forms an instantaneous protective layer on the hair during the shampooing process. A real-time demonstration will be held at this exhibition hall so that visitors can experience the effects of the ingredient directly, and plans to enter the global market starting with the launch on Amazon in the US in January 2025.
VIRNECT will present ‘VisionX’, a prototype that won the Innovation Award this time. The product provides a chatbot AI through an AI voice interface, and has a function that allows users to check the status of the equipment in real time through conversations with the AI and receive troubleshooting guidance through voice conversations, so users can experience it directly at the KAIST Hall.
‘Standard Energy’ plans to exhibit ‘Energy Tile’, an indoor ESS that utilizes the world’s first vanadium ion battery (hereinafter referred to as VIB). VIB is absolutely safe from fire and has high installation flexibility, so it can be applied to smart cities and AI data centers.
‘A2US’ is the only company in the world that has hydroxyl radical water production technology, and won the Innovation Award for its first product, an air purifier. In the future, it is expected to be widely commercialized in air and water purification, smart farms, food tech, and semiconductor cleaning using safe and environmentally friendly hydroxyl radical water.
Panmnesia, Inc. won the CES Innovation Award for its GPU memory expansion solution equipped with its CXL 3.1 IP. By connecting a memory expansion device using Panmnesia’s CXL IP, the GPU’s memory capacity can be expanded to the terabyte level. Following the Innovation Award for ‘CXL-equipped AI Accelerator’ at CES 2024 last year, it is the only company to have won the Innovation Award for its AI-oriented CXL solution for two consecutive years.
In addition, technologies from a total of 15 companies will be introduced, including ▴Omelet ▴NEXTWAVE ▴Planby Technologies ▴Cosmo Bee ▴ImpactAI ▴Roen Surgical ▴DIDEN Roboticss ▴Autopedia ▴OAQ ▴HydroXpand ▴BOOKEND ▴Sterri.
On the central stage of the KAIST Hall, KAIST students selected as CES Student Supporters will conduct interviews with participating companies and promote the companies' innovative technologies and solutions. On the 8th, from 5 PM to 7 PM, a KAIST NIGHT event will be held where pre-invited investors and participating companies can network.
Keon Jae Lee, the head of the Institute of Technology Value Creation, said, “Through CES 2025, we will showcase innovative technologies and solutions from startups based on KAIST’s deep science and deep tech, and lead commercialization in cutting-edge technology fields such as AI, robotics, mobility, and environment/energy. KAIST plans to further promote technology commercialization by supporting the growth and marketing of innovative startups through the Institute of Technology Value Creation and by strengthening global networks and expanding cooperation opportunities.”
2024.12.31 View 6279
KAIST Wins CES 2025 Innovation Award, Showcasing Innovative Technologies
KAIST will showcase innovative technologies at the world’s largest technology fair, the Consumer Electronics Show (CES 2025). In addition, KAIST startups VIRNECT Inc., Standard Energy Inc., A2US Inc., and Panmnesia, Inc. won the 2025 CES Innovation Awards.
< Image 1. 3D-Graphical Profile of CES 2025 KAIST Exhibition Booth >
KAIST (President Kwang-Hyung Lee) announced on the 31st that it will operate a 140㎡ standalone booth at CES Eureka Park, which will be held in Las Vegas, USA from January 7th to 10th next year, to showcase KAIST's innovative technologies to global companies and investors.
KAIST startups VIRNECT, Standard Energy, A2US, and Panmnesia, Inc. won the 2025 CES Innovation Awards. ▴VIRNECT won the Innovation Award in the ‘Industrial Equipment and Machinery’ category for ‘VisionX’, an AI-based smart glass for industrial sites; ▴Standard Energy Co., Ltd. won the Innovation Award in the ‘Smart City’ category for developing the world’s first vanadium-ion battery; ▴A2US won the Innovation Award in the ‘Environment & Energy’ category for its portable air purifier that eliminates bacteria, odors, and fine dust in the air with just water droplets; ▴Panmnesia, Inc. won the Innovation Award in the ‘Computer Peripherals and Accessories’ category for its ‘CXL-based GPU Memory Expansion Kit’ that can drastically reduce the cost of building AI infrastructure.
< Image 2. (From left on the top row) VIRNECT, Standard Energy, (From left on the bottom row) A2US, Panmnesia, Inc. >
This exhibition will feature 15 startups that are standing out in cutting-edge technologies such as artificial intelligence (AI), robotics, mobility, and sustainability. In particular, AI-based deep tech startups in various industries such as logistics, architecture, and medicine will take up half of the total, showcasing the companies’ innovative AI technologies.
Polyphenol Factory Co.,Ltd introduces ‘Grabity’, a hair loss shampoo launched domestically, which applies the patented ingredient ‘LiftMax 308™’ that forms an instantaneous protective layer on the hair during the shampooing process. A real-time demonstration will be held at this exhibition hall so that visitors can experience the effects of the ingredient directly, and plans to enter the global market starting with the launch on Amazon in the US in January 2025.
VIRNECT will present ‘VisionX’, a prototype that won the Innovation Award this time. The product provides a chatbot AI through an AI voice interface, and has a function that allows users to check the status of the equipment in real time through conversations with the AI and receive troubleshooting guidance through voice conversations, so users can experience it directly at the KAIST Hall.
‘Standard Energy’ plans to exhibit ‘Energy Tile’, an indoor ESS that utilizes the world’s first vanadium ion battery (hereinafter referred to as VIB). VIB is absolutely safe from fire and has high installation flexibility, so it can be applied to smart cities and AI data centers.
‘A2US’ is the only company in the world that has hydroxyl radical water production technology, and won the Innovation Award for its first product, an air purifier. In the future, it is expected to be widely commercialized in air and water purification, smart farms, food tech, and semiconductor cleaning using safe and environmentally friendly hydroxyl radical water.
Panmnesia, Inc. won the CES Innovation Award for its GPU memory expansion solution equipped with its CXL 3.1 IP. By connecting a memory expansion device using Panmnesia’s CXL IP, the GPU’s memory capacity can be expanded to the terabyte level. Following the Innovation Award for ‘CXL-equipped AI Accelerator’ at CES 2024 last year, it is the only company to have won the Innovation Award for its AI-oriented CXL solution for two consecutive years.
In addition, technologies from a total of 15 companies will be introduced, including ▴Omelet ▴NEXTWAVE ▴Planby Technologies ▴Cosmo Bee ▴ImpactAI ▴Roen Surgical ▴DIDEN Roboticss ▴Autopedia ▴OAQ ▴HydroXpand ▴BOOKEND ▴Sterri.
On the central stage of the KAIST Hall, KAIST students selected as CES Student Supporters will conduct interviews with participating companies and promote the companies' innovative technologies and solutions. On the 8th, from 5 PM to 7 PM, a KAIST NIGHT event will be held where pre-invited investors and participating companies can network.
Keon Jae Lee, the head of the Institute of Technology Value Creation, said, “Through CES 2025, we will showcase innovative technologies and solutions from startups based on KAIST’s deep science and deep tech, and lead commercialization in cutting-edge technology fields such as AI, robotics, mobility, and environment/energy. KAIST plans to further promote technology commercialization by supporting the growth and marketing of innovative startups through the Institute of Technology Value Creation and by strengthening global networks and expanding cooperation opportunities.”
2024.12.31 View 6279 -
 KAIST Scientifically Identifies a Method to Prevent Dental Erosion from Carbonated Drinks
A Korean research team, which had previously visualized and scientifically proven the harmful effects of carbonated drinks like cola on dental health using nanotechnology, has now identified a mechanism for an effective method to prevent tooth damage caused by these beverages.
KAIST (represented by President Kwang Hyung Lee) announced on the 5th of December that a team led by Professor Seungbum Hong from the Department of Materials Science and Engineering, in collaboration with Seoul National University's School of Dentistry (Departments of Pediatric Dentistry and Oral Microbiology) and Professor Hye Ryung Byon’s research team from the Department of Chemistry, has revealed through nanotechnology that silver diamine fluoride (SDF)* forms a fluoride-containing protective layer on the tooth surface, effectively inhibiting cola-induced erosion.
*SDF (Silver Diamine Fluoride): A dental agent primarily used for the treatment and prevention of tooth decay. SDF strengthens carious lesions, suppresses bacterial growth, and halts the progression of cavities.
The team analyzed the surface morphology and mechanical properties of tooth enamel on a nanoscale using atomic force microscopy (AFM). They also examined the chemical properties of the nano-film formed by SDF treatment using X-ray photoelectron spectroscopy (XPS)* and Fourier-transform infrared spectroscopy (FTIR)*.
*XPS (X-ray Photoelectron Spectroscopy): A powerful surface analysis technique used to investigate the chemical composition and electronic structure of materials.
*FTIR (Fourier-Transform Infrared Spectroscopy): An analytical method that identifies the molecular structure and composition of materials by analyzing how they absorb or transmit infrared light.
The findings showed significant differences in surface roughness and elastic modulus between teeth exposed to cola with and without SDF treatment. Teeth treated with SDF exhibited minimal changes in surface roughness due to erosion (from 64 nm to 70 nm) and maintained a high elastic modulus (from 215 GPa to 205 GPa).
This was attributed to the formation of a fluoroapatite* layer by SDF, which acted as a protective shield.
*Fluoroapatite: A phosphate mineral with the chemical formula Ca₅(PO₄)₃F (calcium fluoro-phosphate). It can occur naturally or be synthesized biologically/artificially and plays a crucial role in strengthening teeth and bones.
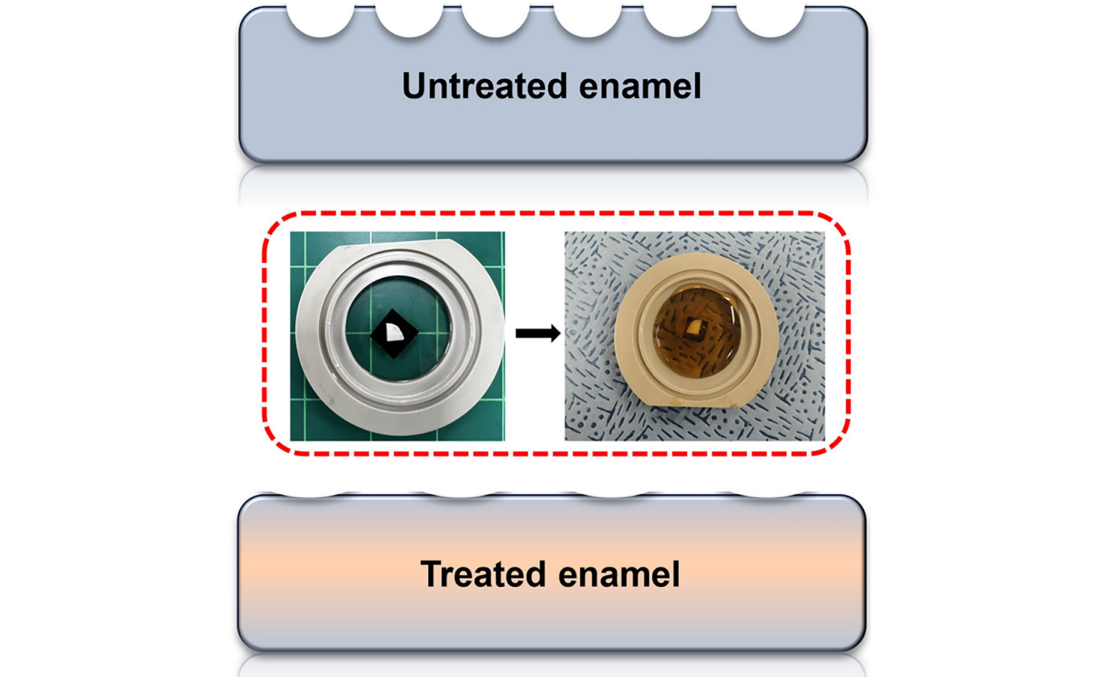
< Figure 1. Schematic of the workflow. Surface morphology and mechanical properties of untreated and treated silver diamine fluoride (SDF) treated enamel exposed to cola were analyzed over time using atomic force microscopy (AFM). >
Professor Young J. Kim from Seoul National University's Department of Pediatric Dentistry noted, "This technology could be applied to prevent dental erosion and strengthen teeth for both children and adults. It is a cost-effective and accessible dental treatment."
< Figure 2. Changes in surface roughness and elastic modulus according to time of exposure to cola for SDF untreated and treated teeth. After 1 hour, the surface roughness of the SDF untreated teeth rapidly became rougher from 83 nm to 287 nm and the elastic modulus weakened from 125 GPa to 13 GPa, whereas the surface roughness of the SDF treated teeth changed only slightly from 64 nm to 70 nm and the elastic modulus barely changed from 215 GPa to 205 GPa, maintaining a similar state to the initial state. >
Professor Seungbum Hong emphasized, "Dental health significantly impacts quality of life. This research offers an effective non-invasive method to prevent early dental erosion, moving beyond traditional surgical treatments. By simply applying SDF, dental erosion can be prevented and enamel strengthened, potentially reducing pain and costs associated with treatment."
This study, led by the first author Aditi Saha, a PhD student in KAIST’s Department of Materials Science and Engineering, was published in the international journal Biomaterials Research on November 7 under the title "Nanoscale Study on Noninvasive Prevention of Dental Erosion of Enamel by Silver Diamine Fluoride". The research was supported by the National Research Foundation of Korea.
2024.12.11 View 5001
KAIST Scientifically Identifies a Method to Prevent Dental Erosion from Carbonated Drinks
A Korean research team, which had previously visualized and scientifically proven the harmful effects of carbonated drinks like cola on dental health using nanotechnology, has now identified a mechanism for an effective method to prevent tooth damage caused by these beverages.
KAIST (represented by President Kwang Hyung Lee) announced on the 5th of December that a team led by Professor Seungbum Hong from the Department of Materials Science and Engineering, in collaboration with Seoul National University's School of Dentistry (Departments of Pediatric Dentistry and Oral Microbiology) and Professor Hye Ryung Byon’s research team from the Department of Chemistry, has revealed through nanotechnology that silver diamine fluoride (SDF)* forms a fluoride-containing protective layer on the tooth surface, effectively inhibiting cola-induced erosion.
*SDF (Silver Diamine Fluoride): A dental agent primarily used for the treatment and prevention of tooth decay. SDF strengthens carious lesions, suppresses bacterial growth, and halts the progression of cavities.
The team analyzed the surface morphology and mechanical properties of tooth enamel on a nanoscale using atomic force microscopy (AFM). They also examined the chemical properties of the nano-film formed by SDF treatment using X-ray photoelectron spectroscopy (XPS)* and Fourier-transform infrared spectroscopy (FTIR)*.
*XPS (X-ray Photoelectron Spectroscopy): A powerful surface analysis technique used to investigate the chemical composition and electronic structure of materials.
*FTIR (Fourier-Transform Infrared Spectroscopy): An analytical method that identifies the molecular structure and composition of materials by analyzing how they absorb or transmit infrared light.
The findings showed significant differences in surface roughness and elastic modulus between teeth exposed to cola with and without SDF treatment. Teeth treated with SDF exhibited minimal changes in surface roughness due to erosion (from 64 nm to 70 nm) and maintained a high elastic modulus (from 215 GPa to 205 GPa).
This was attributed to the formation of a fluoroapatite* layer by SDF, which acted as a protective shield.
*Fluoroapatite: A phosphate mineral with the chemical formula Ca₅(PO₄)₃F (calcium fluoro-phosphate). It can occur naturally or be synthesized biologically/artificially and plays a crucial role in strengthening teeth and bones.
< Figure 1. Schematic of the workflow. Surface morphology and mechanical properties of untreated and treated silver diamine fluoride (SDF) treated enamel exposed to cola were analyzed over time using atomic force microscopy (AFM). >
Professor Young J. Kim from Seoul National University's Department of Pediatric Dentistry noted, "This technology could be applied to prevent dental erosion and strengthen teeth for both children and adults. It is a cost-effective and accessible dental treatment."
< Figure 2. Changes in surface roughness and elastic modulus according to time of exposure to cola for SDF untreated and treated teeth. After 1 hour, the surface roughness of the SDF untreated teeth rapidly became rougher from 83 nm to 287 nm and the elastic modulus weakened from 125 GPa to 13 GPa, whereas the surface roughness of the SDF treated teeth changed only slightly from 64 nm to 70 nm and the elastic modulus barely changed from 215 GPa to 205 GPa, maintaining a similar state to the initial state. >
Professor Seungbum Hong emphasized, "Dental health significantly impacts quality of life. This research offers an effective non-invasive method to prevent early dental erosion, moving beyond traditional surgical treatments. By simply applying SDF, dental erosion can be prevented and enamel strengthened, potentially reducing pain and costs associated with treatment."
This study, led by the first author Aditi Saha, a PhD student in KAIST’s Department of Materials Science and Engineering, was published in the international journal Biomaterials Research on November 7 under the title "Nanoscale Study on Noninvasive Prevention of Dental Erosion of Enamel by Silver Diamine Fluoride". The research was supported by the National Research Foundation of Korea.
2024.12.11 View 5001 -
 KAIST Secures Core Technology for Ultra-High-Resolution Image Sensors
A joint research team from Korea and the United States has developed next-generation, high-resolution image sensor technology with higher power efficiency and a smaller size compared to existing sensors. Notably, they have secured foundational technology for ultra-high-resolution shortwave infrared (SWIR) image sensors, an area currently dominated by Sony, paving the way for future market entry.
KAIST (represented by President Kwang Hyung Lee) announced on the 20th of November that a research team led by Professor SangHyeon Kim from the School of Electrical Engineering, in collaboration with Inha University and Yale University in the U.S., has developed an ultra-thin broadband photodiode (PD), marking a significant breakthrough in high-performance image sensor technology.
This research drastically improves the trade-off between the absorption layer thickness and quantum efficiency found in conventional photodiode technology. Specifically, it achieved high quantum efficiency of over 70% even in an absorption layer thinner than one micrometer (μm), reducing the thickness of the absorption layer by approximately 70% compared to existing technologies.
A thinner absorption layer simplifies pixel processing, allowing for higher resolution and smoother carrier diffusion, which is advantageous for light carrier acquisition while also reducing the cost. However, a fundamental issue with thinner absorption layers is the reduced absorption of long-wavelength light.
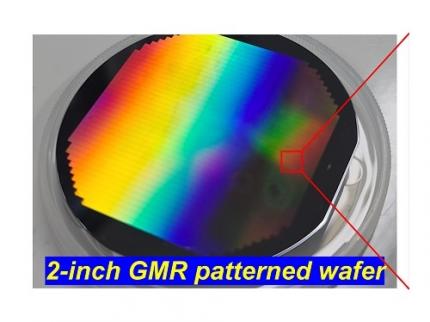
< Figure 1. Schematic diagram of the InGaAs photodiode image sensor integrated on the Guided-Mode Resonance (GMR) structure proposed in this study (left), a photograph of the fabricated wafer, and a scanning electron microscope (SEM) image of the periodic patterns (right) >
The research team introduced a guided-mode resonance (GMR) structure* that enables high-efficiency light absorption across a wide spectral range from 400 nanometers (nm) to 1,700 nanometers (nm). This wavelength range includes not only visible light but also light the SWIR region, making it valuable for various industrial applications.
*Guided-Mode Resonance (GMR) Structure: A concept used in electromagnetics, a phenomenon in which a specific (light) wave resonates (forming a strong electric/magnetic field) at a specific wavelength. Since energy is maximized under these conditions, it has been used to increase antenna or radar efficiency.
The improved performance in the SWIR region is expected to play a significant role in developing next-generation image sensors with increasingly high resolutions. The GMR structure, in particular, holds potential for further enhancing resolution and other performance metrics through hybrid integration and monolithic 3D integration with complementary metal-oxide-semiconductor (CMOS)-based readout integrated circuits (ROIC).
< Figure 2. Benchmark for state-of-the-art InGaAs-based SWIR pixels with simulated EQE lines as a function of TAL variation. Performance is maintained while reducing the absorption layer thickness from 2.1 micrometers or more to 1 micrometer or less while reducing it by 50% to 70% >
The research team has significantly enhanced international competitiveness in low-power devices and ultra-high-resolution imaging technology, opening up possibilities for applications in digital cameras, security systems, medical and industrial image sensors, as well as future ultra-high-resolution sensors for autonomous driving, aerospace, and satellite observation.
Professor Sang Hyun Kim, the lead researcher, commented, “This research demonstrates that significantly higher performance than existing technologies can be achieved even with ultra-thin absorption layers.”
< Figure 3. Top optical microscope image and cross-sectional scanning electron microscope image of the InGaAs photodiode image sensor fabricated on the GMR structure (left). Improved quantum efficiency performance of the ultra-thin image sensor (red) fabricated with the technology proposed in this study (right) >
The results of this research were published on 15th of November, in the prestigious international journal Light: Science & Applications (JCR 2.9%, IF=20.6), with Professor Dae-Myung Geum of Inha University (formerly a KAIST postdoctoral researcher) and Dr. Jinha Lim (currently a postdoctoral researcher at Yale University) as co-first authors. (Paper title: “Highly-efficient (>70%) and Wide-spectral (400 nm -1700 nm) sub-micron-thick InGaAs photodiodes for future high-resolution image sensors”)
This study was supported by the National Research Foundation of Korea.
2024.11.22 View 5518
KAIST Secures Core Technology for Ultra-High-Resolution Image Sensors
A joint research team from Korea and the United States has developed next-generation, high-resolution image sensor technology with higher power efficiency and a smaller size compared to existing sensors. Notably, they have secured foundational technology for ultra-high-resolution shortwave infrared (SWIR) image sensors, an area currently dominated by Sony, paving the way for future market entry.
KAIST (represented by President Kwang Hyung Lee) announced on the 20th of November that a research team led by Professor SangHyeon Kim from the School of Electrical Engineering, in collaboration with Inha University and Yale University in the U.S., has developed an ultra-thin broadband photodiode (PD), marking a significant breakthrough in high-performance image sensor technology.
This research drastically improves the trade-off between the absorption layer thickness and quantum efficiency found in conventional photodiode technology. Specifically, it achieved high quantum efficiency of over 70% even in an absorption layer thinner than one micrometer (μm), reducing the thickness of the absorption layer by approximately 70% compared to existing technologies.
A thinner absorption layer simplifies pixel processing, allowing for higher resolution and smoother carrier diffusion, which is advantageous for light carrier acquisition while also reducing the cost. However, a fundamental issue with thinner absorption layers is the reduced absorption of long-wavelength light.
< Figure 1. Schematic diagram of the InGaAs photodiode image sensor integrated on the Guided-Mode Resonance (GMR) structure proposed in this study (left), a photograph of the fabricated wafer, and a scanning electron microscope (SEM) image of the periodic patterns (right) >
The research team introduced a guided-mode resonance (GMR) structure* that enables high-efficiency light absorption across a wide spectral range from 400 nanometers (nm) to 1,700 nanometers (nm). This wavelength range includes not only visible light but also light the SWIR region, making it valuable for various industrial applications.
*Guided-Mode Resonance (GMR) Structure: A concept used in electromagnetics, a phenomenon in which a specific (light) wave resonates (forming a strong electric/magnetic field) at a specific wavelength. Since energy is maximized under these conditions, it has been used to increase antenna or radar efficiency.
The improved performance in the SWIR region is expected to play a significant role in developing next-generation image sensors with increasingly high resolutions. The GMR structure, in particular, holds potential for further enhancing resolution and other performance metrics through hybrid integration and monolithic 3D integration with complementary metal-oxide-semiconductor (CMOS)-based readout integrated circuits (ROIC).
< Figure 2. Benchmark for state-of-the-art InGaAs-based SWIR pixels with simulated EQE lines as a function of TAL variation. Performance is maintained while reducing the absorption layer thickness from 2.1 micrometers or more to 1 micrometer or less while reducing it by 50% to 70% >
The research team has significantly enhanced international competitiveness in low-power devices and ultra-high-resolution imaging technology, opening up possibilities for applications in digital cameras, security systems, medical and industrial image sensors, as well as future ultra-high-resolution sensors for autonomous driving, aerospace, and satellite observation.
Professor Sang Hyun Kim, the lead researcher, commented, “This research demonstrates that significantly higher performance than existing technologies can be achieved even with ultra-thin absorption layers.”
< Figure 3. Top optical microscope image and cross-sectional scanning electron microscope image of the InGaAs photodiode image sensor fabricated on the GMR structure (left). Improved quantum efficiency performance of the ultra-thin image sensor (red) fabricated with the technology proposed in this study (right) >
The results of this research were published on 15th of November, in the prestigious international journal Light: Science & Applications (JCR 2.9%, IF=20.6), with Professor Dae-Myung Geum of Inha University (formerly a KAIST postdoctoral researcher) and Dr. Jinha Lim (currently a postdoctoral researcher at Yale University) as co-first authors. (Paper title: “Highly-efficient (>70%) and Wide-spectral (400 nm -1700 nm) sub-micron-thick InGaAs photodiodes for future high-resolution image sensors”)
This study was supported by the National Research Foundation of Korea.
2024.11.22 View 5518 -
 KAIST’s RAIBO2 becomes the World’s First Robo-dog to Successfully Complete a Full-course Marathon
KAIST's quadrupedal walking robot "RAIBO", which can run seamlessly on sandy beaches, has now evolved into "RAIBO2"and achieved the groundbreaking milestone by becomeing the world's first quadrupedal robot to successfully complete a full-course marathon in an official event.
< Photo 1. A group photo of RAIBO2 and the team after completing the full-course marathon >
KAIST (President Kwang Hyung Lee) announced on the 17th of November that Professor Je Min Hwangbo's research team of the Department of Mechanical Engineering participated in the 22nd Sangju Dried-Persimmon Marathon and completed the full-course race (42.195 km) with a time of 4 hours 19 minutes and 52 seconds.
< Photo 2. RAIBO2 after completing the full-course marathon with its official record presented on the photo wall >
The Sangju Dried Persimmon Marathon is known for its challenging course featuring two 50 m elevation climbs, each at the 14 km and 28 km marks, making it defficult for amateur runners. This made it an especially demanding challenge for the walking robot, as unexpected losses in efficiency could occur.
< Photo 3. RAIBO2 with the completion medal around its neck >
To prepare RAIBO2, Professor Hwangbo's team developed a walking controller using reinforcement learning algorithms within their proprietary simulation environment "RaiSim". This simulator allowed the team to simlate diverse terrains such as slopes, stairs, and icy roads to ensure stable walking performance.
In particular, RAIBO2's high torque transparency joint mechanism enable the robot to efficiently harvest energy on the downhill slopes to regain some of the energy used in climbing up steep hill.
In addition, the stability of the robot was greatly improved through the collaboration with RAION ROBOTICS Inc., a company founded by the researchers from Professor Hwangbo’s lab.
< Figure 1. Conceptual diagram of power flow employed by the quadrupedal robot >
< Figure 2. The process of leg posture change of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. >
Due to the nature of walking, pedal robots must employ highly complex systems that can withstand periodic vibrations from the frequent impacts that occur upon contact with the ground surface. Immediately after development, high efficiency was already recorded in short-distance experiments in the laboratory at the beginning of the year, but the manufacturing technology of RAION ROBOTICS significantly bolstered RAIBO's performance in running safely for a prolonged time of more than 4 hours among random pack of people in an actual marathon.
Compared to previous studies on improving walking efficiency, where external parts or software could not be changed and only limited improvements were made in some areas, Professor Hwangbo’s research team cited the fact that they were able to comprehensively solve problems by developing all steps and parts in-house, including mechanism design, electrical design, software, and artificial intelligence, as a key factor in improving efficiency.
Following the development of RAIBO1, the research team developed RAIBO2 and optimized all aspects of the robot. In particular, the team integrated the motor driver circuitry directly into the robot to minimize actuator losses and increase the control bandwidth, greatly improving walking efficiency and stability.
< Photo 4. RAIBO2 running the full-course marathon along human participants >
Choongin Lee, a Ph.D. Student that co-first author of the studies on RAIBO, said, “Through the marathon project, we demonstrated that RAIBO2 has the walking performance to stably execute services such as delivery and patrol in urban environments with many people and random objects,” and “In follow-up research, we will add autonomous navigation functions to RAIBO and strive to achieve the world’s best walking performance in mountainous and disaster environments.”
< Photo 5. RAIBO2 and co-first authors of the related research at the Ph.D. program of the Department of Mechanical Engineering at KAIST. (From left) Choongin Lee, Donghoon Youm, and Jeongsoo Park >
This research was conducted with the support of Samsung Electronics Future Technology Promotion Center and RAION ROBOTICS Inc.
2024.11.17 View 8395
KAIST’s RAIBO2 becomes the World’s First Robo-dog to Successfully Complete a Full-course Marathon
KAIST's quadrupedal walking robot "RAIBO", which can run seamlessly on sandy beaches, has now evolved into "RAIBO2"and achieved the groundbreaking milestone by becomeing the world's first quadrupedal robot to successfully complete a full-course marathon in an official event.
< Photo 1. A group photo of RAIBO2 and the team after completing the full-course marathon >
KAIST (President Kwang Hyung Lee) announced on the 17th of November that Professor Je Min Hwangbo's research team of the Department of Mechanical Engineering participated in the 22nd Sangju Dried-Persimmon Marathon and completed the full-course race (42.195 km) with a time of 4 hours 19 minutes and 52 seconds.
< Photo 2. RAIBO2 after completing the full-course marathon with its official record presented on the photo wall >
The Sangju Dried Persimmon Marathon is known for its challenging course featuring two 50 m elevation climbs, each at the 14 km and 28 km marks, making it defficult for amateur runners. This made it an especially demanding challenge for the walking robot, as unexpected losses in efficiency could occur.
< Photo 3. RAIBO2 with the completion medal around its neck >
To prepare RAIBO2, Professor Hwangbo's team developed a walking controller using reinforcement learning algorithms within their proprietary simulation environment "RaiSim". This simulator allowed the team to simlate diverse terrains such as slopes, stairs, and icy roads to ensure stable walking performance.
In particular, RAIBO2's high torque transparency joint mechanism enable the robot to efficiently harvest energy on the downhill slopes to regain some of the energy used in climbing up steep hill.
In addition, the stability of the robot was greatly improved through the collaboration with RAION ROBOTICS Inc., a company founded by the researchers from Professor Hwangbo’s lab.
< Figure 1. Conceptual diagram of power flow employed by the quadrupedal robot >
< Figure 2. The process of leg posture change of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. >
Due to the nature of walking, pedal robots must employ highly complex systems that can withstand periodic vibrations from the frequent impacts that occur upon contact with the ground surface. Immediately after development, high efficiency was already recorded in short-distance experiments in the laboratory at the beginning of the year, but the manufacturing technology of RAION ROBOTICS significantly bolstered RAIBO's performance in running safely for a prolonged time of more than 4 hours among random pack of people in an actual marathon.
Compared to previous studies on improving walking efficiency, where external parts or software could not be changed and only limited improvements were made in some areas, Professor Hwangbo’s research team cited the fact that they were able to comprehensively solve problems by developing all steps and parts in-house, including mechanism design, electrical design, software, and artificial intelligence, as a key factor in improving efficiency.
Following the development of RAIBO1, the research team developed RAIBO2 and optimized all aspects of the robot. In particular, the team integrated the motor driver circuitry directly into the robot to minimize actuator losses and increase the control bandwidth, greatly improving walking efficiency and stability.
< Photo 4. RAIBO2 running the full-course marathon along human participants >
Choongin Lee, a Ph.D. Student that co-first author of the studies on RAIBO, said, “Through the marathon project, we demonstrated that RAIBO2 has the walking performance to stably execute services such as delivery and patrol in urban environments with many people and random objects,” and “In follow-up research, we will add autonomous navigation functions to RAIBO and strive to achieve the world’s best walking performance in mountainous and disaster environments.”
< Photo 5. RAIBO2 and co-first authors of the related research at the Ph.D. program of the Department of Mechanical Engineering at KAIST. (From left) Choongin Lee, Donghoon Youm, and Jeongsoo Park >
This research was conducted with the support of Samsung Electronics Future Technology Promotion Center and RAION ROBOTICS Inc.
2024.11.17 View 8395 -
 KAIST Unveils New Possibilities for Treating Intractable Brain Tumors
< Photo 1. (From left) Professor Heung Kyu Lee, KAIST Department of Biological Sciences, and Dr. Keun Bon Ku >
Immunotherapy, which enhances the immune system's T cell response to eliminate cancer cells, has emerged as a key approach in cancer treatment. However, in the case of glioblastoma, an aggressive and treatment-resistant brain tumor, numerous clinical trials have failed to confirm their efficacy. Korean researchers have recently analyzed the mechanisms that cause T cell exhaustion, which is characterized by a loss of function or a weakened response following prolonged exposure to antigens in such intractable cancers, identifying key control factors in T cell activation and clarifying the mechanisms that enhance therapeutic effectiveness.
KAIST (represented by President Kwang Hyung Lee) announced on the 6th of November that Professor Heung Kyu Lee’s team from the Department of Biological Sciences, in collaboration with the Korea Research Institute of Chemical Technology (represented by President Young Kuk Lee), has confirmed improved survival rates in a glioblastoma mouse model. By removing the inhibitory Fc gamma receptor (FcγRIIB), the research team was able to restore the responsiveness of cytotoxic T cells to immune checkpoint inhibitors, leading to enhanced anticancer activity.
The research team examined the effect of FcγRIIB, an inhibitory receptor recently found in cytotoxic T cells, on tumor-infiltrating T cells and the therapeutic effectiveness of the anti-PD-1 immune checkpoint inhibitor.
< Figure 1. Study results on improved survival rate due to increased antitumor activity of anti-PD-1 treatment in inhibitory Fc gamma receptor(Fcgr2b) ablation mice with murine glioblastoma. >
Their findings showed that deleting FcγRIIB induced the increase of tumor antigen-specific memory T cells, which helps to suppress exhaustion, enhances stem-like qualities, and reactivates T cell-mediated antitumor immunity, particularly in response to anti-PD-1 treatment. Furthermore, FcγRIIB deletion led to an increase in antigen-specific memory T cells that maintained continuous infiltration into the tumor tissue.
This study presents a new therapeutic target for tumors unresponsive to immune checkpoint inhibitors and demonstrates that combining FcγRIIB inhibition with anti-PD-1 treatment can produce synergistic effects, potentially improving therapeutic outcomes for tumors like glioblastoma, which typically show resistance to anti-PD-1 therapy.
< Figure 2. Overview of the study on the enhanced response to anti-PD-1 therapy for glioblastoma brain tumors upon deletion of the inhibitory Fc gamma receptor (FcγRIIB) in tumor microenvironment. When the inhibitory Fc gamma receptor (FcγRIIB) of cytotoxic T cells is deleted, an increase in tumor-specific memory T cells (Ttsms) was observed. In addition, this T cell subset is identified as originating from the tumor-draining lymph nodes(TdLNs) and leads to persistent infiltration into the tumor tissue. Anti-PD-1 therapy leads to an increased anti-tumor immune response via Ttsms, which is confirmed by increased tumor cell toxicity and increased cell division and decreased cell de-migration indices. Ultimately, the increased cytotoxic T cell immune response leads to an increase in the survival rate of glioblastoma. >
Professor Heung Kyu Lee explained, "This study offers a way to overcome clinical failures in treating brain tumors with immune checkpoint therapy and opens possibilities for broader applications to other intractable cancers. It also highlights the potential of utilizing cytotoxic T cells for tumor cell therapy."
The study, led by Dr. Keun Bon Ku of KAIST (currently a senior researcher at the Korea Research Institute of Chemical Technology's Center for Infectious Disease Diagnosis and Prevention), along with Chae Won Kim, Yumin Kim, Byeong Hoon Kang, Jeongwoo La, In Kang, Won Hyung Park, Stephen Ahn, and Sung Ki Lee, was published online on October 26 in the Journal for ImmunoTherapy of Cancer, an international journal in tumor immunology and therapy from the Society for Immunotherapy of Cancer. (Paper title: “Inhibitory Fcγ receptor deletion enhances CD8 T cell stemness increasing anti-PD-1 therapy responsiveness against glioblastoma,” http://dx.doi.org/10.1136/jitc-2024-009449).
This research received support from the National Research Foundation of Korea, the Bio & Medical Technology Development Program, and the Samsung Science & Technology Foundation.
2024.11.15 View 5239
KAIST Unveils New Possibilities for Treating Intractable Brain Tumors
< Photo 1. (From left) Professor Heung Kyu Lee, KAIST Department of Biological Sciences, and Dr. Keun Bon Ku >
Immunotherapy, which enhances the immune system's T cell response to eliminate cancer cells, has emerged as a key approach in cancer treatment. However, in the case of glioblastoma, an aggressive and treatment-resistant brain tumor, numerous clinical trials have failed to confirm their efficacy. Korean researchers have recently analyzed the mechanisms that cause T cell exhaustion, which is characterized by a loss of function or a weakened response following prolonged exposure to antigens in such intractable cancers, identifying key control factors in T cell activation and clarifying the mechanisms that enhance therapeutic effectiveness.
KAIST (represented by President Kwang Hyung Lee) announced on the 6th of November that Professor Heung Kyu Lee’s team from the Department of Biological Sciences, in collaboration with the Korea Research Institute of Chemical Technology (represented by President Young Kuk Lee), has confirmed improved survival rates in a glioblastoma mouse model. By removing the inhibitory Fc gamma receptor (FcγRIIB), the research team was able to restore the responsiveness of cytotoxic T cells to immune checkpoint inhibitors, leading to enhanced anticancer activity.
The research team examined the effect of FcγRIIB, an inhibitory receptor recently found in cytotoxic T cells, on tumor-infiltrating T cells and the therapeutic effectiveness of the anti-PD-1 immune checkpoint inhibitor.
< Figure 1. Study results on improved survival rate due to increased antitumor activity of anti-PD-1 treatment in inhibitory Fc gamma receptor(Fcgr2b) ablation mice with murine glioblastoma. >
Their findings showed that deleting FcγRIIB induced the increase of tumor antigen-specific memory T cells, which helps to suppress exhaustion, enhances stem-like qualities, and reactivates T cell-mediated antitumor immunity, particularly in response to anti-PD-1 treatment. Furthermore, FcγRIIB deletion led to an increase in antigen-specific memory T cells that maintained continuous infiltration into the tumor tissue.
This study presents a new therapeutic target for tumors unresponsive to immune checkpoint inhibitors and demonstrates that combining FcγRIIB inhibition with anti-PD-1 treatment can produce synergistic effects, potentially improving therapeutic outcomes for tumors like glioblastoma, which typically show resistance to anti-PD-1 therapy.
< Figure 2. Overview of the study on the enhanced response to anti-PD-1 therapy for glioblastoma brain tumors upon deletion of the inhibitory Fc gamma receptor (FcγRIIB) in tumor microenvironment. When the inhibitory Fc gamma receptor (FcγRIIB) of cytotoxic T cells is deleted, an increase in tumor-specific memory T cells (Ttsms) was observed. In addition, this T cell subset is identified as originating from the tumor-draining lymph nodes(TdLNs) and leads to persistent infiltration into the tumor tissue. Anti-PD-1 therapy leads to an increased anti-tumor immune response via Ttsms, which is confirmed by increased tumor cell toxicity and increased cell division and decreased cell de-migration indices. Ultimately, the increased cytotoxic T cell immune response leads to an increase in the survival rate of glioblastoma. >
Professor Heung Kyu Lee explained, "This study offers a way to overcome clinical failures in treating brain tumors with immune checkpoint therapy and opens possibilities for broader applications to other intractable cancers. It also highlights the potential of utilizing cytotoxic T cells for tumor cell therapy."
The study, led by Dr. Keun Bon Ku of KAIST (currently a senior researcher at the Korea Research Institute of Chemical Technology's Center for Infectious Disease Diagnosis and Prevention), along with Chae Won Kim, Yumin Kim, Byeong Hoon Kang, Jeongwoo La, In Kang, Won Hyung Park, Stephen Ahn, and Sung Ki Lee, was published online on October 26 in the Journal for ImmunoTherapy of Cancer, an international journal in tumor immunology and therapy from the Society for Immunotherapy of Cancer. (Paper title: “Inhibitory Fcγ receptor deletion enhances CD8 T cell stemness increasing anti-PD-1 therapy responsiveness against glioblastoma,” http://dx.doi.org/10.1136/jitc-2024-009449).
This research received support from the National Research Foundation of Korea, the Bio & Medical Technology Development Program, and the Samsung Science & Technology Foundation.
2024.11.15 View 5239 -
 KAIST’s Beach-Roaming Quadrupedal Robot “RAIBO” to Run a Marathon!
“RAIBO”, KAIST’s four-legged robot featuring remarkable agility even on challenging terrains like sandy beaches, is now set to be the first in the world to complete a full marathon.
< Photo 1. A group photo of the research team of Professor Je Min Hwangbo (second from the right in the front row) of the Department of Mechanical Engineering who participated in the marathon event at 2024 Geumsan Insam Festival last September >
On the 17th of November, KAIST (represented by President Kwang Hyung Lee) announced that Professor Je Min Hwangbo’s team from the Department of Mechanical Engineering has developed an upgraded version, “RAIBO2,” which will take on the full 42.195-kilometer course at the "Sangju Dried-Persimmon Marathon".
This is over double the previous maximum distance achieved by quadruped robots, which was limited to around 20 kilometers. The KAIST team has successfully developed a robot that can walk continuously for 43 kilometers on a single charge, completing the course in 4 hours and 40 minutes by following a GPS-guided path on the university’s main athletic field. Through this marathon, the team aims to demonstrate RAIBO2’s walking performance in an actual urban environment.
Previously, most measurements of walking robots’ travel distances were confined to controlled laboratory conditions or theoretical data. This marathon challenge is thus significant in that the robot will run alongside the general public in a real urban setting, marking the first attempt to validate the practical potential of four-legged robots in real environments.
Quadruped robots have shown advantages in challenging terrains, such as ice, sand, and mountainous areas, where they can walk stably. However, limited travel distance and running time have long been obstacles to wider applications.
< Figure 1. Conceptual diagram of power flow employed by the quadruped robot >
Professor Hwangbo’s team designed every component of the robot, from its actuators to its mechanical structure, to overcome these limitations. Notably, they implemented an efficient walking control system based on reinforcement learning using their proprietary dynamic simulator “RaiSim”.
The team also collected and analyzed walking data from outdoor environments, creating a model to address walking losses. This model was then used to iteratively improve walking efficiency over one full year.
< Figure 2. The leg posture change process of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. >
This is the team’s second attempt. Their first was during the marathon event at “Geumsan Insam Festival” in September when the robot’s battery ran out at the 37-kilometer mark, falling short of completion. The battery drained 10 kilometers earlier than expected due to frequent speed changes as the robot adjusted to the pacing of other runners on the course.
Following the initial attempt, the team focused on technical improvements for a successful finish. They enhanced control efficiency by implementing joint stiffness control directly onto the motor actuator and increased battery capacity by 33% by refining the internal structure. These improvements enabled the robot to cover a maximum distance of 67 kilometers on straight paths.
< Figure 3. Data from completing 43 km on a single charge at the main sports field on campus. Left) GPS data of the driving course used during autonomous running. Middle) Covered distance by the hour. Right) Energy consumption by module >
Choongin Lee, a Ph.D. student of RAI Lab who is one of the co-first author of this study, explained, “Our comprehensive analysis of walking losses in terms of mechanics, electrical systems, and walking methods was crucial to improving walking efficiency. This research marks an important milestone in extending the operating range of quadruped robots to urban environments.”
< Photo 2. A Photo from Practice Run>
This research was supported by the Samsung Electronics Future Technology Development Center and RAION ROBOTICS Co., Ltd.
< Photo 3. A Photo from Practice Run >
2024.11.15 View 5373
KAIST’s Beach-Roaming Quadrupedal Robot “RAIBO” to Run a Marathon!
“RAIBO”, KAIST’s four-legged robot featuring remarkable agility even on challenging terrains like sandy beaches, is now set to be the first in the world to complete a full marathon.
< Photo 1. A group photo of the research team of Professor Je Min Hwangbo (second from the right in the front row) of the Department of Mechanical Engineering who participated in the marathon event at 2024 Geumsan Insam Festival last September >
On the 17th of November, KAIST (represented by President Kwang Hyung Lee) announced that Professor Je Min Hwangbo’s team from the Department of Mechanical Engineering has developed an upgraded version, “RAIBO2,” which will take on the full 42.195-kilometer course at the "Sangju Dried-Persimmon Marathon".
This is over double the previous maximum distance achieved by quadruped robots, which was limited to around 20 kilometers. The KAIST team has successfully developed a robot that can walk continuously for 43 kilometers on a single charge, completing the course in 4 hours and 40 minutes by following a GPS-guided path on the university’s main athletic field. Through this marathon, the team aims to demonstrate RAIBO2’s walking performance in an actual urban environment.
Previously, most measurements of walking robots’ travel distances were confined to controlled laboratory conditions or theoretical data. This marathon challenge is thus significant in that the robot will run alongside the general public in a real urban setting, marking the first attempt to validate the practical potential of four-legged robots in real environments.
Quadruped robots have shown advantages in challenging terrains, such as ice, sand, and mountainous areas, where they can walk stably. However, limited travel distance and running time have long been obstacles to wider applications.
< Figure 1. Conceptual diagram of power flow employed by the quadruped robot >
Professor Hwangbo’s team designed every component of the robot, from its actuators to its mechanical structure, to overcome these limitations. Notably, they implemented an efficient walking control system based on reinforcement learning using their proprietary dynamic simulator “RaiSim”.
The team also collected and analyzed walking data from outdoor environments, creating a model to address walking losses. This model was then used to iteratively improve walking efficiency over one full year.
< Figure 2. The leg posture change process of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. >
This is the team’s second attempt. Their first was during the marathon event at “Geumsan Insam Festival” in September when the robot’s battery ran out at the 37-kilometer mark, falling short of completion. The battery drained 10 kilometers earlier than expected due to frequent speed changes as the robot adjusted to the pacing of other runners on the course.
Following the initial attempt, the team focused on technical improvements for a successful finish. They enhanced control efficiency by implementing joint stiffness control directly onto the motor actuator and increased battery capacity by 33% by refining the internal structure. These improvements enabled the robot to cover a maximum distance of 67 kilometers on straight paths.
< Figure 3. Data from completing 43 km on a single charge at the main sports field on campus. Left) GPS data of the driving course used during autonomous running. Middle) Covered distance by the hour. Right) Energy consumption by module >
Choongin Lee, a Ph.D. student of RAI Lab who is one of the co-first author of this study, explained, “Our comprehensive analysis of walking losses in terms of mechanics, electrical systems, and walking methods was crucial to improving walking efficiency. This research marks an important milestone in extending the operating range of quadruped robots to urban environments.”
< Photo 2. A Photo from Practice Run>
This research was supported by the Samsung Electronics Future Technology Development Center and RAION ROBOTICS Co., Ltd.
< Photo 3. A Photo from Practice Run >
2024.11.15 View 5373 -
 KAIST Researchers Introduce New and Improved, Next-Generation Perovskite Solar Cell
- KAIST-Yonsei university researchers developed innovative dipole technology to maximize near-infrared photon harvesting efficiency
- Overcoming the shortcoming of existing perovskite solar cells that cannot utilize approximately 52% of total solar energy
- Development of next-generation solar cell technology with high efficiency and high stability that can absorb near-infrared light beyond the existing visible light range with a perovskite-dipole-organic semiconductor hybrid structure
< Photo. (From left) Professor Jung-Yong Lee, Ph.D. candidate Min-Ho Lee, and Master’s candidate Min Seok Kim of the School of Electrical Engineering >
Existing perovskite solar cells, which have the problem of not being able to utilize approximately 52% of total solar energy, have been developed by a Korean research team as an innovative technology that maximizes near-infrared light capture performance while greatly improving power conversion efficiency. This greatly increases the possibility of commercializing next-generation solar cells and is expected to contribute to important technological advancements in the global solar cell market.
The research team of Professor Jung-Yong Lee of the School of Electrical Engineering at KAIST (President Kwang-Hyung Lee) and Professor Woojae Kim of the Department of Chemistry at Yonsei University announced on October 31st that they have developed a high-efficiency and high-stability organic-inorganic hybrid solar cell production technology that maximizes near-infrared light capture beyond the existing visible light range.
The research team suggested and advanced a hybrid next-generation device structure with organic photo-semiconductors that complements perovskite materials limited to visible light absorption and expands the absorption range to near-infrared.
In addition, they revealed the electronic structure problem that mainly occurs in the structure and announced a high-performance solar cell device that dramatically solved this problem by introducing a dipole layer*.
*Dipole layer: A thin material layer that controls the energy level within the device to facilitate charge transport and forms an interface potential difference to improve device performance.
Existing lead-based perovskite solar cells have a problem in that their absorption spectrum is limited to the visible light region with a wavelength of 850 nanometers (nm) or less, which prevents them from utilizing approximately 52% of the total solar energy.
To solve this problem, the research team designed a hybrid device that combined an organic bulk heterojunction (BHJ) with perovskite and implemented a solar cell that can absorb up to the near-infrared region.
In particular, by introducing a sub-nanometer dipole interface layer, they succeeded in alleviating the energy barrier between the perovskite and the organic bulk heterojunction (BHJ), suppressing charge accumulation, maximizing the contribution to the near-infrared, and improving the current density (JSC) to 4.9 mA/cm².
The key achievement of this study is that the power conversion efficiency (PCE) of the hybrid device has been significantly increased from 20.4% to 24.0%. In particular, this study achieved a high internal quantum efficiency (IQE) compared to previous studies, reaching 78% in the near-infrared region.
< Figure. The illustration of the mechanism of improving the electronic structure and charge transfer capability through Perovskite/organic hybrid device structure and dipole interfacial layers (DILs). The proposed dipole interfacial layer forms a strong interfacial dipole, effectively reducing the energy barrier between the perovskite and organic bulk heterojunction (BHJ), and suppressing hole accumulation. This technology improves near-infrared photon harvesting and charge transfer, and as a result, the power conversion efficiency of the solar cell increases to 24.0%. In addition, it achieves excellent stability by maintaining performance for 1,200 hours even in an extremely humid environment. >
In addition, this device showed high stability, showing excellent results of maintaining more than 80% of the initial efficiency in the maximum output tracking for more than 800 hours even under extreme humidity conditions.
Professor Jung-Yong Lee said, “Through this study, we have effectively solved the charge accumulation and energy band mismatch problems faced by existing perovskite/organic hybrid solar cells, and we will be able to significantly improve the power conversion efficiency while maximizing the near-infrared light capture performance, which will be a new breakthrough that can solve the mechanical-chemical stability problems of existing perovskites and overcome the optical limitations.”
This study, in which KAIST School of Electrical Engineering Ph.D. candidate Min-Ho Lee and Master's candidate Min Seok Kim participated as co-first authors, was published in the September 30th online edition of the international academic journal Advanced Materials. (Paper title: Suppressing Hole Accumulation Through Sub-Nanometer Dipole Interfaces in Hybrid Perovskite/Organic Solar Cells for Boosting Near-Infrared Photon Harvesting).
This study was conducted with the support of the National Research Foundation of Korea.
2024.10.31 View 6751
KAIST Researchers Introduce New and Improved, Next-Generation Perovskite Solar Cell
- KAIST-Yonsei university researchers developed innovative dipole technology to maximize near-infrared photon harvesting efficiency
- Overcoming the shortcoming of existing perovskite solar cells that cannot utilize approximately 52% of total solar energy
- Development of next-generation solar cell technology with high efficiency and high stability that can absorb near-infrared light beyond the existing visible light range with a perovskite-dipole-organic semiconductor hybrid structure
< Photo. (From left) Professor Jung-Yong Lee, Ph.D. candidate Min-Ho Lee, and Master’s candidate Min Seok Kim of the School of Electrical Engineering >
Existing perovskite solar cells, which have the problem of not being able to utilize approximately 52% of total solar energy, have been developed by a Korean research team as an innovative technology that maximizes near-infrared light capture performance while greatly improving power conversion efficiency. This greatly increases the possibility of commercializing next-generation solar cells and is expected to contribute to important technological advancements in the global solar cell market.
The research team of Professor Jung-Yong Lee of the School of Electrical Engineering at KAIST (President Kwang-Hyung Lee) and Professor Woojae Kim of the Department of Chemistry at Yonsei University announced on October 31st that they have developed a high-efficiency and high-stability organic-inorganic hybrid solar cell production technology that maximizes near-infrared light capture beyond the existing visible light range.
The research team suggested and advanced a hybrid next-generation device structure with organic photo-semiconductors that complements perovskite materials limited to visible light absorption and expands the absorption range to near-infrared.
In addition, they revealed the electronic structure problem that mainly occurs in the structure and announced a high-performance solar cell device that dramatically solved this problem by introducing a dipole layer*.
*Dipole layer: A thin material layer that controls the energy level within the device to facilitate charge transport and forms an interface potential difference to improve device performance.
Existing lead-based perovskite solar cells have a problem in that their absorption spectrum is limited to the visible light region with a wavelength of 850 nanometers (nm) or less, which prevents them from utilizing approximately 52% of the total solar energy.
To solve this problem, the research team designed a hybrid device that combined an organic bulk heterojunction (BHJ) with perovskite and implemented a solar cell that can absorb up to the near-infrared region.
In particular, by introducing a sub-nanometer dipole interface layer, they succeeded in alleviating the energy barrier between the perovskite and the organic bulk heterojunction (BHJ), suppressing charge accumulation, maximizing the contribution to the near-infrared, and improving the current density (JSC) to 4.9 mA/cm².
The key achievement of this study is that the power conversion efficiency (PCE) of the hybrid device has been significantly increased from 20.4% to 24.0%. In particular, this study achieved a high internal quantum efficiency (IQE) compared to previous studies, reaching 78% in the near-infrared region.
< Figure. The illustration of the mechanism of improving the electronic structure and charge transfer capability through Perovskite/organic hybrid device structure and dipole interfacial layers (DILs). The proposed dipole interfacial layer forms a strong interfacial dipole, effectively reducing the energy barrier between the perovskite and organic bulk heterojunction (BHJ), and suppressing hole accumulation. This technology improves near-infrared photon harvesting and charge transfer, and as a result, the power conversion efficiency of the solar cell increases to 24.0%. In addition, it achieves excellent stability by maintaining performance for 1,200 hours even in an extremely humid environment. >
In addition, this device showed high stability, showing excellent results of maintaining more than 80% of the initial efficiency in the maximum output tracking for more than 800 hours even under extreme humidity conditions.
Professor Jung-Yong Lee said, “Through this study, we have effectively solved the charge accumulation and energy band mismatch problems faced by existing perovskite/organic hybrid solar cells, and we will be able to significantly improve the power conversion efficiency while maximizing the near-infrared light capture performance, which will be a new breakthrough that can solve the mechanical-chemical stability problems of existing perovskites and overcome the optical limitations.”
This study, in which KAIST School of Electrical Engineering Ph.D. candidate Min-Ho Lee and Master's candidate Min Seok Kim participated as co-first authors, was published in the September 30th online edition of the international academic journal Advanced Materials. (Paper title: Suppressing Hole Accumulation Through Sub-Nanometer Dipole Interfaces in Hybrid Perovskite/Organic Solar Cells for Boosting Near-Infrared Photon Harvesting).
This study was conducted with the support of the National Research Foundation of Korea.
2024.10.31 View 6751 -
 A KAIST Team Develops Face-Conforming LED Mask Showing 340% Improved Efficacy in Deep Skin Elasticity
- A KAIST research team led by Professor Keon Jae Lee has developed a deep skin-stimulating LED mask which has been verified in clinical trials to improve dermis elasticity by 340%.
< Figure 1. Overall concept of face-fit surface-lighting micro-LEDs (FSLED) mask. a. Optical image of the FSLED mask showing uniform surface-lighting. schematic illustration of the FSLED mask. The 2D to 3D transformation procedure b. Difference in cosmetic effect on deep skin elasticity, wrinkles, and sagging between FSLED mask and CLED mask. (improvement percentage in eight weeks) >
Conventional LED masks, with their rigid design, fail to conform closely to the skin's contours. This limitation causes substantial light reflection, with up to 90% reflected over a distance of 2 cm, reducing light penetration and limiting stimulation of the deep skin layers essential for effective skin rejuvenation.
To address these challenges, Professor Lee's team developed a face-conforming surface lighting micro-LED (FSLED) mask, which can provide uniform photostimulation to the dermis. The key technology lies in the mask's ability to deliver uniform light to deep skin tissues while maintaining a conformal skin attachment. This is achieved through a 3D origami structure, integrated with 3,770 micro-LEDs and flexible surface light-diffusion layer, minimizing the gaps between the light source and the skin.
In clinical trials involving 33 participants, the FSLED mask demonstrated a 340% improvement in deep skin elasticity compared to conventional LED masks, proving its efficacy in significantly reducing skin wrinkles, sagging and aging.
Professor Keon Jae Lee said, “The FSLED mask provides cosmetic benefits to the entire facial dermis without the side effects of low-temperature burns, making home-care anti-aging treatment that enhances the quality of human life possible. The product is being manufactured by Fronics, KAIST startup company, and will be distributed globally through Amorepacific's network, with sales starting in November.”
This result titled “Clinical Validation of Face-fit Surface-lighting Micro Light-emitting Diode Mask for Skin Anti-aging Treatment”, in which Min Seo Kim, a student of the Master-Doctorate integrated program, and Jaehun An, a Ph.D. candidate, in the Department of Materials Science and Engineering of KAIST, took part as co-first authors, was published in Advanced Materials on October 22nd, 2024 (DOI: 10.1002/adma.202411651).
Introductory Video: Face-conforming surface LED mask for skin anti-aging ( https://www.youtube.com/watch?v=kSccLwx8N_w )
2024.10.29 View 7315
A KAIST Team Develops Face-Conforming LED Mask Showing 340% Improved Efficacy in Deep Skin Elasticity
- A KAIST research team led by Professor Keon Jae Lee has developed a deep skin-stimulating LED mask which has been verified in clinical trials to improve dermis elasticity by 340%.
< Figure 1. Overall concept of face-fit surface-lighting micro-LEDs (FSLED) mask. a. Optical image of the FSLED mask showing uniform surface-lighting. schematic illustration of the FSLED mask. The 2D to 3D transformation procedure b. Difference in cosmetic effect on deep skin elasticity, wrinkles, and sagging between FSLED mask and CLED mask. (improvement percentage in eight weeks) >
Conventional LED masks, with their rigid design, fail to conform closely to the skin's contours. This limitation causes substantial light reflection, with up to 90% reflected over a distance of 2 cm, reducing light penetration and limiting stimulation of the deep skin layers essential for effective skin rejuvenation.
To address these challenges, Professor Lee's team developed a face-conforming surface lighting micro-LED (FSLED) mask, which can provide uniform photostimulation to the dermis. The key technology lies in the mask's ability to deliver uniform light to deep skin tissues while maintaining a conformal skin attachment. This is achieved through a 3D origami structure, integrated with 3,770 micro-LEDs and flexible surface light-diffusion layer, minimizing the gaps between the light source and the skin.
In clinical trials involving 33 participants, the FSLED mask demonstrated a 340% improvement in deep skin elasticity compared to conventional LED masks, proving its efficacy in significantly reducing skin wrinkles, sagging and aging.
Professor Keon Jae Lee said, “The FSLED mask provides cosmetic benefits to the entire facial dermis without the side effects of low-temperature burns, making home-care anti-aging treatment that enhances the quality of human life possible. The product is being manufactured by Fronics, KAIST startup company, and will be distributed globally through Amorepacific's network, with sales starting in November.”
This result titled “Clinical Validation of Face-fit Surface-lighting Micro Light-emitting Diode Mask for Skin Anti-aging Treatment”, in which Min Seo Kim, a student of the Master-Doctorate integrated program, and Jaehun An, a Ph.D. candidate, in the Department of Materials Science and Engineering of KAIST, took part as co-first authors, was published in Advanced Materials on October 22nd, 2024 (DOI: 10.1002/adma.202411651).
Introductory Video: Face-conforming surface LED mask for skin anti-aging ( https://www.youtube.com/watch?v=kSccLwx8N_w )
2024.10.29 View 7315 -
 Team KAIST Crowned Champion for their World’s Best Ironman, Winning their 2nd Consecutive Win at the Cyborg Olympics
< Group photo of our research team participating in the 3rd Cybathlon >
The Cybathlon is an international competition, which aims to help overcome disabilities through the use of robotics technology. KAIST researchers came in third, winning the bronze medal, at their 1st participation in 2016, won their first gold medal at the 2nd competition in 2020, and took back the gold medal at this year’s 3rd competition, successfully defending their champion title.
KAIST (President Kwang-Hyung Lee) announced on the 28th of October that the wearable robot ‘WalkON Suit F1’ developed by the joint research team of KAIST EXO-Lab, Move Lab, and Angel Robotics, led by Professor Kyoungchul Kong of the Department of Mechanical Engineering (Chairman of Angel Robotics), won gold medal in Cybathlon 2024 held on the 27th.
< Seunghwan Kim, the Paraplegic Pilot of Team KAIST, cheering after completing all the missions >
Cybathlon is an international competition first held in Switzerland that challenges teams to develop assistive technologies with the purpose of overcoming disabilities, and is also called the Cyborg Olympics. Right after each competition, the missions for the next competition are announced, and research teams from around the world research and develop the right assistive technology for next four years to accomplish the given mission.
Aside from the Exoskeleton Race, competitions in a total of eight disciplines are held, including Arm Prosthesis Race, Leg Prosthesis Race, and Wheelchair Race. A total of 71 teams from 26 countries participated in the 3rd Cybathlon event. Professor Kyoungchul Kong’s research team participated in the Exoskeleton Race, the same discipline they took part in the previous competition.
The Exoskeleton Race is the highlight of the event that can be called the core of the Cybathlon. In the prosthetic arm or leg events, disabled athletes wearing traditional assistive devices instead of powered devices often win depending more on the ability of the athletes rather than the technology behind the tools.
However, the exoskeleton event requires individuals with paraplegic disability to walk completely dependent on the robotic device to perform various missions, so the technical difficulty and the dependence on robotics technology is high.
In fact, many teams gave up on participating after seeing the missions for this competition, and more than half of the research teams declared withdrawal during the developmental process. In the end, only six teams from Korea, Thailands, Switzerland, Germany, and the Netherlands participated in the actual competition. Even the research team from the Swiss headquarters declared forfeiture midway as the competition date drew nearer.
< Cybathlon 2024 – Exoskeleton Race Mission Description >
The reason why many teams gave up in the exoskeleton discipline was because the difficulty of the missions was unusually high. Most research teams have the skills to make paraplegic athletes walk, but there were many other difficult tasks, such as making them walk without crutches or using both hands, while standing free on both legs on the exoskeleton, to cut a lump of sponge block, as in imitating food preparing process.
The reason why the difficulty of the missions increased like this is because Professor Kong's research team completed all the missions given to them too quickly in the last competition. In fact, in the last competition, there was even a question asked whether Kim Byeong-Uk (paraplegic) wearing the WalkON Suit F1 was really disabled.
Professor Kong's research team developed WalkON Suit F1 to successfully complete the missions. The number of motorized joints increased from six to twelve, and the output of the motor itself was more than doubled compared to the previous model that ran in the competition back in 2020. The 6-channel ground reaction force sensor on the foot measured the robot's balance 1,000 times per second to maintain balance. Cameras were installed to detect obstacles, and an AI board for implementation of AI neural network was also installed.
On top of the technologies required to complete the competition missions, a function was implemented that allows the users to wear the robot by themselves and dock on to it right from their wheelchair. In the process, all parts were domestically produced and all basic technologies were internalized. The outer design of the robot was done by Professor Hyunjoon Park of KAIST, and the harmony between people and robots was pursued.
In the end, the results of the competition were as expected. The only team that could successfully perform all of the mission tasks, which were originally designed to challenge Professor Kong's research team, was Professor Kong's team. They successfully completed missions such as moving by sidesteps between narrow chairs, moving boxes, walking freely unassisted by crutches, passing through a narrow door and closing it behind, and working on food preparation in the kitchen, recording 6 minutes and 41 seconds to complete all six tasks.
The Swiss and Thai teams that took 2nd and 3rd places were all given 10 minutes, but only were able to perform two missions, each earning twenty points. It was an unevenly matched race to begin with. The Cybathlon broadcast team was more surprised and interested in the performance of WalkON Suit F1 than in result of the race.
< Team KAIST’s Paraplegic Pilot Seunghwan Kim (left), and Professor Kyoungchul Kong (right) >
Researcher Jeongsu Park, the captain of Team KAIST, said, “We came into this competition thinking of it as a competition against ourselves to begin with and focused on showing the technological gap. Now, we are very happy and proud that our endeavors achieved such good result as well.” He added, “We plan to continue to showcase various functions of the WalkON Suit F1 that have not yet been publicly introduced.”
Researcher Seunghwan Kim, the paraplegic athlete of the team, said, “I am so touched that I was able to introduce the world’s best wearable robot technology of Korea with my own body.”
On a different note, Professor Kong’s research team has successfully commercialized wearable robots through Angel Robotics Co., Ltd. since the 2020 competition. In 2022, they began distributing “ANGEL LEGS M20,” the first wearable robot to be covered by health insurance, and as a result, Angel Robotics Co., Ltd. was successfully listed on KOSDAQ this March.
The various know-how and core technologies accumulated while preparing for this competition is to contribute to further development and propagation of wearable robots, provoking imagination to draw on the future of wearable robots and on how it may change our daily lives.
Final Match (Self-filmed): https://youtu.be/3ASAtvkiOhw
Final Match and Interview (Official Video): https://youtu.be/FSfxOTpDjSE
Final Match and Interview (Summary): https://youtu.be/Sb_vd5-3f_0
2024.10.28 View 8934
Team KAIST Crowned Champion for their World’s Best Ironman, Winning their 2nd Consecutive Win at the Cyborg Olympics
< Group photo of our research team participating in the 3rd Cybathlon >
The Cybathlon is an international competition, which aims to help overcome disabilities through the use of robotics technology. KAIST researchers came in third, winning the bronze medal, at their 1st participation in 2016, won their first gold medal at the 2nd competition in 2020, and took back the gold medal at this year’s 3rd competition, successfully defending their champion title.
KAIST (President Kwang-Hyung Lee) announced on the 28th of October that the wearable robot ‘WalkON Suit F1’ developed by the joint research team of KAIST EXO-Lab, Move Lab, and Angel Robotics, led by Professor Kyoungchul Kong of the Department of Mechanical Engineering (Chairman of Angel Robotics), won gold medal in Cybathlon 2024 held on the 27th.
< Seunghwan Kim, the Paraplegic Pilot of Team KAIST, cheering after completing all the missions >
Cybathlon is an international competition first held in Switzerland that challenges teams to develop assistive technologies with the purpose of overcoming disabilities, and is also called the Cyborg Olympics. Right after each competition, the missions for the next competition are announced, and research teams from around the world research and develop the right assistive technology for next four years to accomplish the given mission.
Aside from the Exoskeleton Race, competitions in a total of eight disciplines are held, including Arm Prosthesis Race, Leg Prosthesis Race, and Wheelchair Race. A total of 71 teams from 26 countries participated in the 3rd Cybathlon event. Professor Kyoungchul Kong’s research team participated in the Exoskeleton Race, the same discipline they took part in the previous competition.
The Exoskeleton Race is the highlight of the event that can be called the core of the Cybathlon. In the prosthetic arm or leg events, disabled athletes wearing traditional assistive devices instead of powered devices often win depending more on the ability of the athletes rather than the technology behind the tools.
However, the exoskeleton event requires individuals with paraplegic disability to walk completely dependent on the robotic device to perform various missions, so the technical difficulty and the dependence on robotics technology is high.
In fact, many teams gave up on participating after seeing the missions for this competition, and more than half of the research teams declared withdrawal during the developmental process. In the end, only six teams from Korea, Thailands, Switzerland, Germany, and the Netherlands participated in the actual competition. Even the research team from the Swiss headquarters declared forfeiture midway as the competition date drew nearer.
< Cybathlon 2024 – Exoskeleton Race Mission Description >
The reason why many teams gave up in the exoskeleton discipline was because the difficulty of the missions was unusually high. Most research teams have the skills to make paraplegic athletes walk, but there were many other difficult tasks, such as making them walk without crutches or using both hands, while standing free on both legs on the exoskeleton, to cut a lump of sponge block, as in imitating food preparing process.
The reason why the difficulty of the missions increased like this is because Professor Kong's research team completed all the missions given to them too quickly in the last competition. In fact, in the last competition, there was even a question asked whether Kim Byeong-Uk (paraplegic) wearing the WalkON Suit F1 was really disabled.
Professor Kong's research team developed WalkON Suit F1 to successfully complete the missions. The number of motorized joints increased from six to twelve, and the output of the motor itself was more than doubled compared to the previous model that ran in the competition back in 2020. The 6-channel ground reaction force sensor on the foot measured the robot's balance 1,000 times per second to maintain balance. Cameras were installed to detect obstacles, and an AI board for implementation of AI neural network was also installed.
On top of the technologies required to complete the competition missions, a function was implemented that allows the users to wear the robot by themselves and dock on to it right from their wheelchair. In the process, all parts were domestically produced and all basic technologies were internalized. The outer design of the robot was done by Professor Hyunjoon Park of KAIST, and the harmony between people and robots was pursued.
In the end, the results of the competition were as expected. The only team that could successfully perform all of the mission tasks, which were originally designed to challenge Professor Kong's research team, was Professor Kong's team. They successfully completed missions such as moving by sidesteps between narrow chairs, moving boxes, walking freely unassisted by crutches, passing through a narrow door and closing it behind, and working on food preparation in the kitchen, recording 6 minutes and 41 seconds to complete all six tasks.
The Swiss and Thai teams that took 2nd and 3rd places were all given 10 minutes, but only were able to perform two missions, each earning twenty points. It was an unevenly matched race to begin with. The Cybathlon broadcast team was more surprised and interested in the performance of WalkON Suit F1 than in result of the race.
< Team KAIST’s Paraplegic Pilot Seunghwan Kim (left), and Professor Kyoungchul Kong (right) >
Researcher Jeongsu Park, the captain of Team KAIST, said, “We came into this competition thinking of it as a competition against ourselves to begin with and focused on showing the technological gap. Now, we are very happy and proud that our endeavors achieved such good result as well.” He added, “We plan to continue to showcase various functions of the WalkON Suit F1 that have not yet been publicly introduced.”
Researcher Seunghwan Kim, the paraplegic athlete of the team, said, “I am so touched that I was able to introduce the world’s best wearable robot technology of Korea with my own body.”
On a different note, Professor Kong’s research team has successfully commercialized wearable robots through Angel Robotics Co., Ltd. since the 2020 competition. In 2022, they began distributing “ANGEL LEGS M20,” the first wearable robot to be covered by health insurance, and as a result, Angel Robotics Co., Ltd. was successfully listed on KOSDAQ this March.
The various know-how and core technologies accumulated while preparing for this competition is to contribute to further development and propagation of wearable robots, provoking imagination to draw on the future of wearable robots and on how it may change our daily lives.
Final Match (Self-filmed): https://youtu.be/3ASAtvkiOhw
Final Match and Interview (Official Video): https://youtu.be/FSfxOTpDjSE
Final Match and Interview (Summary): https://youtu.be/Sb_vd5-3f_0
2024.10.28 View 8934 -
 KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 12540
KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 12540 -
 KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 6016
KAIST Industrial Design’s Professor Sangmin Bae’s team selected as Top 20 of James Dyson Award 2024
KAIST (President Kwang-Hyung Lee) announced that the 'Oxynizer', a non-electrical medical oxygen generator for developing countries designed by Professor Sangmin Bae's team in the Department of Industrial Design, has been selected to be the Top 20 of the James Dyson Award 2024. At the same time, it was announced on the 16th that it was selected as one of the top 100 ‘Prototypes for Humanity’ 2024 and will be exhibited in Dubai in November.
< Photo 1. Photo of the award-winning team of Professor Sangmin Bae’s students of KAIST Department of Industrial Designs at the James Dyson Award 2024 announcement of the National Winners >
The James Dyson Award is a design award hosted by Sir James Dyson, founder of Dyson, and receives ideas for solving everyday problems from next-generation engineers and designers around the world, and selects and awards innovative and excellent designs every year.
The ‘Oxynizer’ developed by Professor Sangmin Bae’s team was selected as the winner of the screening within Korea in September after competing with 122 domestic teams, and was awarded a prize of 5,000 pounds for idea advancement, product development, and commercialization.
< Photo 2. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
In addition, on October 16th, it was selected as one of the top 20 international winners among 1,911 competing works from 29 countries around the world. The international winner will be selected by Sir James Dyson and announced on November 13th. The international competition winner will receive a prize of £5,000, and the winner will receive an additional £30,000, giving them the opportunity to commercialize their idea.
‘Prototype for Humanity’ is a global project hosted by Art Dubai Group and carried out in collaboration with Dubai Future Foundation, Dubai Arts & Culture Authority, and Dubai International Financial Center. It is a forum for international cooperation where leading universities around the world, including Harvard University and MIT, participate to discuss global problems and solutions.
‘Oxynizer’ was selected on September 11 as one of the top 100 out of 3,000 entries submitted by universities in over 100 countries, and will be exhibited at the Jumeirah Emirates Towers of Dubai Future Foundation from November 17 to 22. The organizers will select the top five during the exhibition period, and will award a total of $100,000 in prize money to the winners to support their research.
The ‘Oxynizer’ is a device developed by students Jiwon Kim, Kyeongho Park, Seung-Jun Lee, Jiwon Lee, Yeohyeon Jeong, and Jungwoo Kim under the guidance of Professor Sangmin Bae of KAIST, and is the result of research conducted in the ‘Design Project 1’ class for the graduate students of the Department of Industrial Design at KAIST.
< Photo 3. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
This device was designed to solve the problem of difficulty in supplying oxygen in developing countries due to high installation and maintenance costs. The device was designed to create concentrated oxygen to supply it to a patient in urgent need using an air pump for bicycles, which should be found more easily than a medical oxygen tank.
Professor Sangmin Bae said, “This device creates oxygen using a bicycle air pump and supplies it to patients, and it can separate water vapor and nitrogen in the air using silica gel and zeolite, which are the main materials of the filter, to supply oxygen with a concentration of up to 50%.” “In addition, the filter can be heated and reused after 120 hours of use, so it has the advantage of being able to be used semi-permanently,” he emphasized.
< Photo 4. A photo of Professor Sangmin Bae’s students’ award-winning achievement, ‘Oxynizer’ >
The results of the self-research derived from the KAIST Industrial Design Department class were selected as a world-class award winner and exhibition piece in competition with excellent universities around the world, once again proving the global competitiveness of the KAIST Industrial Design Department.
2024.10.16 View 6016 -
 KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 5058
KAIST Succeeds in the Real-time Observation of Organoids using Holotomography
Organoids, which are 3D miniature organs that mimic the structure and function of human organs, play an essential role in disease research and drug development. A Korean research team has overcome the limitations of existing imaging technologies, succeeding in the real-time, high-resolution observation of living organoids.
KAIST (represented by President Kwang Hyung Lee) announced on the 14th of October that Professor YongKeun Park’s research team from the Department of Physics, in collaboration with the Genome Editing Research Center (Director Bon-Kyoung Koo) of the Institute for Basic Science (IBS President Do-Young Noh) and Tomocube Inc., has developed an imaging technology using holotomography to observe live, small intestinal organoids in real time at a high resolution.
Existing imaging techniques have struggled to observe living organoids in high resolution over extended periods and often required additional treatments like fluorescent staining.
< Figure 1. Overview of the low-coherence HT workflow. Using holotomography, 3D morphological restoration and quantitative analysis of organoids can be performed. In order to improve the limited field of view, which is a limitation of the microscope, our research team utilized a large-area field of view combination algorithm and made a 3D restoration by acquiring multi-focus holographic images for 3D measurements. After that, the organoids were compartmentalized to divide the parts necessary for analysis and quantitatively evaluated the protein concentration measurable from the refractive index and the survival rate of the organoids. >
The research team introduced holotomography technology to address these issues, which provides high-resolution images without the need for fluorescent staining and allows for the long-term observation of dynamic changes in real time without causing cell damage.
The team validated this technology using small intestinal organoids from experimental mice and were able to observe various cell structures inside the organoids in detail. They also captured dynamic changes such as growth processes, cell division, and cell death in real time using holotomography.
Additionally, the technology allowed for the precise analysis of the organoids' responses to drug treatments, verifying the survival of the cells.
The researchers believe that this breakthrough will open new horizons in organoid research, enabling the greater utilization of organoids in drug development, personalized medicine, and regenerative medicine.
Future research is expected to more accurately replicate the in vivo environment of organoids, contributing significantly to a more detailed understanding of various life phenomena at the cellular level through more precise 3D imaging.
< Figure 2. Real-time organoid morphology analysis. Using holotomography, it is possible to observe the lumen and villus development process of intestinal organoids in real time, which was difficult to observe with a conventional microscope. In addition, various information about intestinal organoids can be obtained by quantifying the size and protein amount of intestinal organoids through image analysis. >
Dr. Mahn Jae Lee, a graduate of KAIST's Graduate School of Medical Science and Engineering, currently at Chungnam National University Hospital and the first author of the paper, commented, "This research represents a new imaging technology that surpasses previous limitations and is expected to make a major contribution to disease modeling, personalized treatments, and drug development research using organoids."
The research results were published online in the international journal Experimental & Molecular Medicine on October 1, 2024, and the technology has been recognized for its applicability in various fields of life sciences. (Paper title: “Long-term three-dimensional high-resolution imaging of live unlabeled small intestinal organoids via low-coherence holotomography”)
This research was supported by the National Research Foundation of Korea, KAIST Institutes, and the Institute for Basic Science.
2024.10.14 View 5058