robotics
-
 Hubo Professor Jun-Ho Oh Donates Startup Shares Worth 5 Billion KRW
Rainbow Robotics stock used to endow the development fund
Emeritus Professor Jun-Ho Oh, who developed the 2015 DARPA Challenge winning humanoid robot DRC-Hubo, donated 5 billion KRW on October 25 during a ceremony held at the KAIST campus in Daejeon.
Professor Oh donated his 20% share (400 shares) of his startup Rainbow Robotics, which was established in 2011. Rainbow Robotics was listed on the KOSDAQ this February. The 400 shares were converted to 200,000 shares with a value of approximately 5 billion KRW when listed this year.
KAIST sold the stocks and endowed the Jun-Ho Oh Fund, which will be used for the development of the university. He was the 39th faculty member who launched a startup with technology from his lab and became the biggest faculty entrepreneur donor.
“I have received huge support and funding for my research. Fortunately, the research had a good result and led to the startup. Now I am very delighted to pay back the university. I feel that I have played a part in building the school’s startup ecosystem and creating a virtuous circle,” said Professor Oh during the ceremony.
KAIST President Kwang Hyung Lee declared, “Professor Oh has been a very impressive exemplary model for our aspiring faculty and student tech startups. We will spare no effort to support startups at KAIST.”
Professor Oh, who retired from the Department of Mechanical Engineering last year, now serves as the CTO at Rainbow Robotics. The company is developing humanoid bipedal robots and collaborative robots, and advancing robot technology including parts for astronomical observations.
Professor Hae-Won Park and Professor Je Min Hwangbo, who are now responsible for the Hubo Lab, also joined the ceremony along with employees of Rainbow Robotics.
2021.10.26 View 9430
Hubo Professor Jun-Ho Oh Donates Startup Shares Worth 5 Billion KRW
Rainbow Robotics stock used to endow the development fund
Emeritus Professor Jun-Ho Oh, who developed the 2015 DARPA Challenge winning humanoid robot DRC-Hubo, donated 5 billion KRW on October 25 during a ceremony held at the KAIST campus in Daejeon.
Professor Oh donated his 20% share (400 shares) of his startup Rainbow Robotics, which was established in 2011. Rainbow Robotics was listed on the KOSDAQ this February. The 400 shares were converted to 200,000 shares with a value of approximately 5 billion KRW when listed this year.
KAIST sold the stocks and endowed the Jun-Ho Oh Fund, which will be used for the development of the university. He was the 39th faculty member who launched a startup with technology from his lab and became the biggest faculty entrepreneur donor.
“I have received huge support and funding for my research. Fortunately, the research had a good result and led to the startup. Now I am very delighted to pay back the university. I feel that I have played a part in building the school’s startup ecosystem and creating a virtuous circle,” said Professor Oh during the ceremony.
KAIST President Kwang Hyung Lee declared, “Professor Oh has been a very impressive exemplary model for our aspiring faculty and student tech startups. We will spare no effort to support startups at KAIST.”
Professor Oh, who retired from the Department of Mechanical Engineering last year, now serves as the CTO at Rainbow Robotics. The company is developing humanoid bipedal robots and collaborative robots, and advancing robot technology including parts for astronomical observations.
Professor Hae-Won Park and Professor Je Min Hwangbo, who are now responsible for the Hubo Lab, also joined the ceremony along with employees of Rainbow Robotics.
2021.10.26 View 9430 -
 ‘WalkON Suit 4’ Releases Paraplegics from Wheelchairs
- KAIST Athletes in ‘WalkON Suit 4’ Dominated the Cybathlon 2020 Global Edition. -
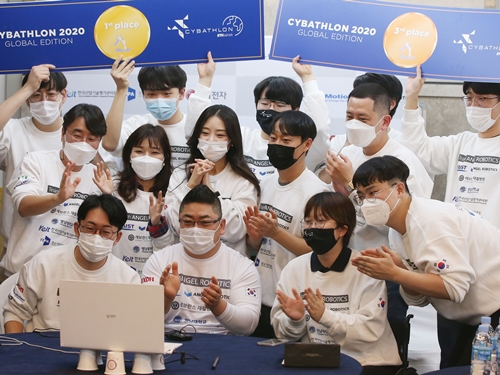
Paraplegic athletes Byeong-Uk Kim and Joohyun Lee from KAIST’s Team Angel Robotics won a gold and a bronze medal respectively at the Cybathlon 2020 Global Edition last week. ‘WalkON Suit 4,’ a wearable robot developed by the Professor Kyoungchul Kong’s team from the Department of Mechanical Engineering topped the standings at the event with double medal success.
Kim, the former bronze medallist, clinched his gold medal by finishing all six tasks in 3 minutes and 47 seconds, whereas Lee came in third with a time of 5 minutes and 51 seconds. TWIICE, a Swiss team, lagged 53 seconds behind Kim’s winning time to be the runner-up.
Cybathlon is a global championship, organized by ETH Zurich, which brings together people with physical disabilities to compete using state-of-the-art assistive technologies to perform everyday tasks. The first championship was held in 2016 in Zurich, Switzerland.
Due to the COVID-19 pandemic, the second championship was postponed twice and held in a new format in a decentralized setting. A total of 51 teams from 20 countries across the world performed the events in their home bases in different time zones instead of traveling to Zurich. Under the supervision of a referee and timekeeper, all races were filmed and then reviewed by judges.
KAIST’s Team Angel Robotics participated in the Powered Exoskeleton Race category, where nine pilots representing five nations including Korea, Switzerland, the US, Russia, and France competed against each other.
The team installed their own arena and raced at the KAIST Main Campus in Daejeon according to the framework, tasks, and rules defined by the competition committee. The two paraplegic pilots were each equipped with exoskeletal devices, the WalkON Suit 4, and undertook six tasks related to daily activities.
The WalkON Suit 4 recorded the fastest walking speed for a complete paraplegic ever reported. For a continuous walk, it achieved a maximum speed of 40 meters per minute. This is comparable to the average walking pace of a non-disabled person, which is around two to four kilometers per hour.
The research team raised the functionality of the robot by adding technology that can observe the user’s level of anxiety and external factors like the state of the walking surface, so it can control itself intelligently. The assistive functions a robot should provide vary greatly with the environment, and the WalkON Suit 4 made it possible to analyze the pace of the user within 30 steps and provide a personally optimized walking pattern, enabling a high walking speed.
The six tasks that Kim and Lee had to complete were:1) sitting and standing back up, 2) navigating around obstacles while avoiding collisions, 3) stepping over obstacles on the ground, 4) going up and down stairs, 5) walking across a tilted path, and 6) climbing a steep slope, opening and closing a door, and descending a steep slope.
Points were given based on the accuracy of each completed task, and the final scores were calculated by adding all of the points that were gained in each attempt, which lasted 10 minutes. Each pilot was given three opportunities and used his/her highest score. Should pilots have the same final score, the pilot who completed the race in the shortest amount of time would win.
Kim said in his victory speech that he was so thrilled to see all his and fellow researchers’ years of hard work paying off. “This will be a good opportunity to show how outstanding Korean wearable robot technologies are,” he added.
Lee, who participated in the competition for the first time, said, “By showing that I can overcome my physical disabilities with robot technology, I’d like to send out a message of hope to everyone who is tired because of COVID-19”.
Professor Kong’s team collaborated in technology development and pilot training with their colleagues from Angel Robotics Co., Ltd., Severance Rehabilitation Hospital, Yeungnam University, Stalks, and the Institute of Rehabilitation Technology.
Footage from the competition is available at the Cybathlon’s official website.
(END)
2020.11.20 View 9972
‘WalkON Suit 4’ Releases Paraplegics from Wheelchairs
- KAIST Athletes in ‘WalkON Suit 4’ Dominated the Cybathlon 2020 Global Edition. -
Paraplegic athletes Byeong-Uk Kim and Joohyun Lee from KAIST’s Team Angel Robotics won a gold and a bronze medal respectively at the Cybathlon 2020 Global Edition last week. ‘WalkON Suit 4,’ a wearable robot developed by the Professor Kyoungchul Kong’s team from the Department of Mechanical Engineering topped the standings at the event with double medal success.
Kim, the former bronze medallist, clinched his gold medal by finishing all six tasks in 3 minutes and 47 seconds, whereas Lee came in third with a time of 5 minutes and 51 seconds. TWIICE, a Swiss team, lagged 53 seconds behind Kim’s winning time to be the runner-up.
Cybathlon is a global championship, organized by ETH Zurich, which brings together people with physical disabilities to compete using state-of-the-art assistive technologies to perform everyday tasks. The first championship was held in 2016 in Zurich, Switzerland.
Due to the COVID-19 pandemic, the second championship was postponed twice and held in a new format in a decentralized setting. A total of 51 teams from 20 countries across the world performed the events in their home bases in different time zones instead of traveling to Zurich. Under the supervision of a referee and timekeeper, all races were filmed and then reviewed by judges.
KAIST’s Team Angel Robotics participated in the Powered Exoskeleton Race category, where nine pilots representing five nations including Korea, Switzerland, the US, Russia, and France competed against each other.
The team installed their own arena and raced at the KAIST Main Campus in Daejeon according to the framework, tasks, and rules defined by the competition committee. The two paraplegic pilots were each equipped with exoskeletal devices, the WalkON Suit 4, and undertook six tasks related to daily activities.
The WalkON Suit 4 recorded the fastest walking speed for a complete paraplegic ever reported. For a continuous walk, it achieved a maximum speed of 40 meters per minute. This is comparable to the average walking pace of a non-disabled person, which is around two to four kilometers per hour.
The research team raised the functionality of the robot by adding technology that can observe the user’s level of anxiety and external factors like the state of the walking surface, so it can control itself intelligently. The assistive functions a robot should provide vary greatly with the environment, and the WalkON Suit 4 made it possible to analyze the pace of the user within 30 steps and provide a personally optimized walking pattern, enabling a high walking speed.
The six tasks that Kim and Lee had to complete were:1) sitting and standing back up, 2) navigating around obstacles while avoiding collisions, 3) stepping over obstacles on the ground, 4) going up and down stairs, 5) walking across a tilted path, and 6) climbing a steep slope, opening and closing a door, and descending a steep slope.
Points were given based on the accuracy of each completed task, and the final scores were calculated by adding all of the points that were gained in each attempt, which lasted 10 minutes. Each pilot was given three opportunities and used his/her highest score. Should pilots have the same final score, the pilot who completed the race in the shortest amount of time would win.
Kim said in his victory speech that he was so thrilled to see all his and fellow researchers’ years of hard work paying off. “This will be a good opportunity to show how outstanding Korean wearable robot technologies are,” he added.
Lee, who participated in the competition for the first time, said, “By showing that I can overcome my physical disabilities with robot technology, I’d like to send out a message of hope to everyone who is tired because of COVID-19”.
Professor Kong’s team collaborated in technology development and pilot training with their colleagues from Angel Robotics Co., Ltd., Severance Rehabilitation Hospital, Yeungnam University, Stalks, and the Institute of Rehabilitation Technology.
Footage from the competition is available at the Cybathlon’s official website.
(END)
2020.11.20 View 9972 -
 Professor Jee-Hwan Ryu Receives IEEE ICRA 2020 Outstanding Reviewer Award
Professor Jee-Hwan Ryu from the Department of Civil and Environmental Engineering was selected as this year’s winner of the Outstanding Reviewer Award presented by the Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation (IEEE ICRA). The award ceremony took place on June 5 during the conference that is being held online May 31 through August 31 for three months.
The IEEE ICRA Outstanding Reviewer Award is given every year to the top reviewers who have provided constructive and high-quality thesis reviews, and contributed to improving the quality of papers published as results of the conference.
Professor Ryu was one of the four winners of this year’s award. He was selected from 9,425 candidates, which was approximately three times bigger than the candidate pool in previous years. He was strongly recommended by the editorial committee of the conference.
(END)
2020.06.10 View 9536
Professor Jee-Hwan Ryu Receives IEEE ICRA 2020 Outstanding Reviewer Award
Professor Jee-Hwan Ryu from the Department of Civil and Environmental Engineering was selected as this year’s winner of the Outstanding Reviewer Award presented by the Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation (IEEE ICRA). The award ceremony took place on June 5 during the conference that is being held online May 31 through August 31 for three months.
The IEEE ICRA Outstanding Reviewer Award is given every year to the top reviewers who have provided constructive and high-quality thesis reviews, and contributed to improving the quality of papers published as results of the conference.
Professor Ryu was one of the four winners of this year’s award. He was selected from 9,425 candidates, which was approximately three times bigger than the candidate pool in previous years. He was strongly recommended by the editorial committee of the conference.
(END)
2020.06.10 View 9536 -
 ‘Mole-bot’ Optimized for Underground and Space Exploration
Biomimetic drilling robot provides new insights into the development of efficient drilling technologies
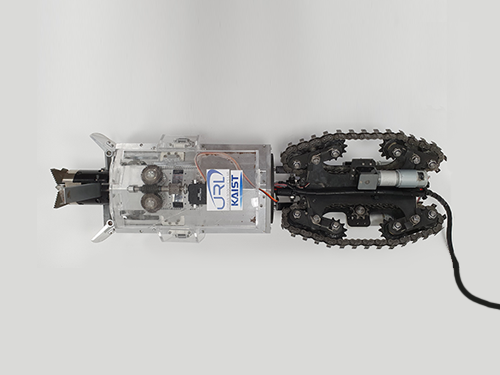
Mole-bot, a drilling biomimetic robot designed by KAIST, boasts a stout scapula, a waist inclinable on all sides, and powerful forelimbs. Most of all, the powerful torque from the expandable drilling bit mimicking the chiseling ability of a mole’s front teeth highlights the best feature of the drilling robot.
The Mole-bot is expected to be used for space exploration and mining for underground resources such as coalbed methane and Rare Earth Elements (REE), which require highly advanced drilling technologies in complex environments.
The research team, led by Professor Hyun Myung from the School of Electrical Engineering, found inspiration for their drilling bot from two striking features of the African mole-rat and European mole.
“The crushing power of the African mole-rat’s teeth is so powerful that they can dig a hole with 48 times more power than their body weight. We used this characteristic for building the main excavation tool. And its expandable drill is designed not to collide with its forelimbs,” said Professor Myung.
The 25-cm wide and 84-cm long Mole-bot can excavate three times faster with six times higher directional accuracy than conventional models. The Mole-bot weighs 26 kg.
After digging, the robot removes the excavated soil and debris using its forelimbs. This embedded muscle feature, inspired by the European mole’s scapula, converts linear motion into a powerful rotational force. For directional drilling, the robot’s elongated waist changes its direction 360° like living mammals.
For exploring underground environments, the research team developed and applied new sensor systems and algorithms to identify the robot’s position and orientation using graph-based 3D Simultaneous Localization and Mapping (SLAM) technology that matches the Earth’s magnetic field sequence, which enables 3D autonomous navigation underground.
According to Market & Market’s survey, the directional drilling market in 2016 is estimated to be 83.3 billion USD and is expected to grow to 103 billion USD in 2021. The growth of the drilling market, starting with the Shale Revolution, is likely to expand into the future development of space and polar resources. As initiated by Space X recently, more attention for planetary exploration will be on the rise and its related technology and equipment market will also increase.
The Mole-bot is a huge step forward for efficient underground drilling and exploration technologies. Unlike conventional drilling processes that use environmentally unfriendly mud compounds for cleaning debris, Mole-bot can mitigate environmental destruction. The researchers said their system saves on cost and labor and does not require additional pipelines or other ancillary equipment.
“We look forward to a more efficient resource exploration with this type of drilling robot. We also hope Mole-bot will have a very positive impact on the robotics market in terms of its extensive application spectra and economic feasibility,” said Professor Myung.
This research, made in collaboration with Professor Jung-Wuk Hong and Professor Tae-Hyuk Kwon’s team in the Department of Civil and Environmental Engineering for robot structure analysis and geotechnical experiments, was supported by the Ministry of Trade, Industry and Energy’s Industrial Technology Innovation Project.
Profile
Professor Hyun Myung
Urban Robotics Lab
http://urobot.kaist.ac.kr/
School of Electrical Engineering
KAIST
2020.06.05 View 11168
‘Mole-bot’ Optimized for Underground and Space Exploration
Biomimetic drilling robot provides new insights into the development of efficient drilling technologies
Mole-bot, a drilling biomimetic robot designed by KAIST, boasts a stout scapula, a waist inclinable on all sides, and powerful forelimbs. Most of all, the powerful torque from the expandable drilling bit mimicking the chiseling ability of a mole’s front teeth highlights the best feature of the drilling robot.
The Mole-bot is expected to be used for space exploration and mining for underground resources such as coalbed methane and Rare Earth Elements (REE), which require highly advanced drilling technologies in complex environments.
The research team, led by Professor Hyun Myung from the School of Electrical Engineering, found inspiration for their drilling bot from two striking features of the African mole-rat and European mole.
“The crushing power of the African mole-rat’s teeth is so powerful that they can dig a hole with 48 times more power than their body weight. We used this characteristic for building the main excavation tool. And its expandable drill is designed not to collide with its forelimbs,” said Professor Myung.
The 25-cm wide and 84-cm long Mole-bot can excavate three times faster with six times higher directional accuracy than conventional models. The Mole-bot weighs 26 kg.
After digging, the robot removes the excavated soil and debris using its forelimbs. This embedded muscle feature, inspired by the European mole’s scapula, converts linear motion into a powerful rotational force. For directional drilling, the robot’s elongated waist changes its direction 360° like living mammals.
For exploring underground environments, the research team developed and applied new sensor systems and algorithms to identify the robot’s position and orientation using graph-based 3D Simultaneous Localization and Mapping (SLAM) technology that matches the Earth’s magnetic field sequence, which enables 3D autonomous navigation underground.
According to Market & Market’s survey, the directional drilling market in 2016 is estimated to be 83.3 billion USD and is expected to grow to 103 billion USD in 2021. The growth of the drilling market, starting with the Shale Revolution, is likely to expand into the future development of space and polar resources. As initiated by Space X recently, more attention for planetary exploration will be on the rise and its related technology and equipment market will also increase.
The Mole-bot is a huge step forward for efficient underground drilling and exploration technologies. Unlike conventional drilling processes that use environmentally unfriendly mud compounds for cleaning debris, Mole-bot can mitigate environmental destruction. The researchers said their system saves on cost and labor and does not require additional pipelines or other ancillary equipment.
“We look forward to a more efficient resource exploration with this type of drilling robot. We also hope Mole-bot will have a very positive impact on the robotics market in terms of its extensive application spectra and economic feasibility,” said Professor Myung.
This research, made in collaboration with Professor Jung-Wuk Hong and Professor Tae-Hyuk Kwon’s team in the Department of Civil and Environmental Engineering for robot structure analysis and geotechnical experiments, was supported by the Ministry of Trade, Industry and Energy’s Industrial Technology Innovation Project.
Profile
Professor Hyun Myung
Urban Robotics Lab
http://urobot.kaist.ac.kr/
School of Electrical Engineering
KAIST
2020.06.05 View 11168 -
 Hubo Debuts as a News Anchor
HUBO, a humanoid robot developed by Professor Jun-Ho Oh’s team, made its debut as a co-anchor during the TJB prime time news 8 on May 14.
“Un-contact" became the new normal after Covid-19 and many business solutions are being transformed using robotics. HUBO made two news reports on contactless services using robots in medical, manufacturing, and logistics industries. HUBO 2, the second generation of HUBO, appeared as a special anchor on the local broadcasting network’s special program in celebration of its 25th anniversary.
HUBO is the champion of the 2015 DARPA Robotics Challenge held in the USA. Its FX-2 riding robot also participated in the Olympic torch relay during the 2018 PyeongChang Winter Olympics.
Click here to watch a full video of HUBO anchoring the news.
(END)
2020.05.14 View 12326
Hubo Debuts as a News Anchor
HUBO, a humanoid robot developed by Professor Jun-Ho Oh’s team, made its debut as a co-anchor during the TJB prime time news 8 on May 14.
“Un-contact" became the new normal after Covid-19 and many business solutions are being transformed using robotics. HUBO made two news reports on contactless services using robots in medical, manufacturing, and logistics industries. HUBO 2, the second generation of HUBO, appeared as a special anchor on the local broadcasting network’s special program in celebration of its 25th anniversary.
HUBO is the champion of the 2015 DARPA Robotics Challenge held in the USA. Its FX-2 riding robot also participated in the Olympic torch relay during the 2018 PyeongChang Winter Olympics.
Click here to watch a full video of HUBO anchoring the news.
(END)
2020.05.14 View 12326 -
 Wearable Strain Sensor Using Light Transmittance Helps Measure Physical Signals Better
KAIST researchers have developed a novel wearable strain sensor based on the modulation of optical transmittance of a carbon nanotube (CNT)-embedded elastomer. The sensor is capable of sensitive, stable, and continuous measurement of physical signals. This technology, featured in the March 4th issue of ACS Applied Materials & Interfaces as a front cover article, shows great potential for the detection of subtle human motions and the real-time monitoring of body postures for healthcare applications.
A wearable strain sensor must have high sensitivity, flexibility, and stretchability, as well as low cost. Those used especially for health monitoring should also be tied to long-term solid performance, and be environmentally stable. Various stretchable strain sensors based on piezo-resistive and capacitive principles have been developed to meet all these requirements.
Conventional piezo-resistive strain sensors using functional nanomaterials, including CNTs as the most common example, have shown high sensitivity and great sensing performance. However, they suffer from poor long-term stability and linearity, as well as considerable signal hysteresis. As an alternative, piezo-capacitive strain sensors with better stability, lower hysteresis, and higher stretchability have been suggested. But due to the fact that piezo-capacitive strain sensors exhibit limited sensitivity and strong electromagnetic interference caused by the conductive objects in the surrounding environment, these conventional stretchable strain sensors are still facing limitations that are yet to be resolved.
A KAIST research team led by Professor Inkyu Park from the Department of Mechanical Engineering suggested that an optical-type stretchable strain sensor can be a good alternative to resolve the limitations of conventional piezo-resistive and piezo-capacitive strain sensors, because they have high stability and are less affected by environmental disturbances. The team then introduced an optical wearable strain sensor based on the light transmittance changes of a CNT-embedded elastomer, which further addresses the low sensitivity problem of conventional optical stretchable strain sensors.
In order to achieve a large dynamic range for the sensor, Professor Park and his researchers chose Ecoflex as an elastomeric substrate with good mechanical durability, flexibility, and attachability on human skin, and the new optical wearable strain sensor developed by the research group actually shows a wide dynamic range of 0 to 400%.
In addition, the researchers propagated the microcracks under tensile strain within the film of multi-walled CNTs embedded in the Ecoflex substrate, changing the optical transmittance of the film. By doing so, it was possible for them to develop a wearable strain sensor having a sensitivity 10 times higher than conventional optical stretchable strain sensors.
The proposed sensor has also passed the durability test with excellent results. The sensor’s response after 13,000 sets of cyclic loading was stable without any noticeable drift. This suggests that the sensor response can be used without degradation, even if the sensor is repeatedly used for a long time and in various environmental conditions.
Using the developed sensor, the research team could measure the finger bending motion and used it for robot control. They also developed a three-axes sensor array for body posture monitoring. The sensor was able to monitor human motions with small strains such as a pulse near the carotid artery and muscle movement around the mouth during pronunciation.
Professor Park said, “In this study, our group developed a new wearable strain sensor platform that overcomes many limitations of previously developed resistive, capacitive, and optical-type stretchable strain sensors. Our sensor could be widely used in a variety of fields including soft robotics, wearable electronics, electronic skin, healthcare, and even entertainment.”
This work was supported by the National Research Foundation (NRF) of Korea.
Publication:
Jimin Gu, Donguk Kwon, Junseong Ahn, and Inkyu Park. (2020) “Wearable Strain sensors Using Light Transmittance Change of Carbon Nanotube-Embedded Elastomers with Microcracks” ACS Applied Materials & Interfaces. Volume 12. Issue 9. Available online at https://doi.org/10.1021/acsami.9b18069
Profile:
Inkyu Park
Professor
inkyu@kaist.ac.kr
http://mintlab1.kaist.ac.kr
Micro/Nano Transducers Laboratory (MINT Lab)
Department of Mechanical Engineering (ME)Korea Advanced Institute of Science and Technology (KAIST)
Profile:
Jimin Gu
Ph.D. Candidate
mint9411@kaist.ac.kr
http://mintlab1.kaist.ac.kr
MINT Lab
KAIST ME
(END)
2020.03.20 View 19175
Wearable Strain Sensor Using Light Transmittance Helps Measure Physical Signals Better
KAIST researchers have developed a novel wearable strain sensor based on the modulation of optical transmittance of a carbon nanotube (CNT)-embedded elastomer. The sensor is capable of sensitive, stable, and continuous measurement of physical signals. This technology, featured in the March 4th issue of ACS Applied Materials & Interfaces as a front cover article, shows great potential for the detection of subtle human motions and the real-time monitoring of body postures for healthcare applications.
A wearable strain sensor must have high sensitivity, flexibility, and stretchability, as well as low cost. Those used especially for health monitoring should also be tied to long-term solid performance, and be environmentally stable. Various stretchable strain sensors based on piezo-resistive and capacitive principles have been developed to meet all these requirements.
Conventional piezo-resistive strain sensors using functional nanomaterials, including CNTs as the most common example, have shown high sensitivity and great sensing performance. However, they suffer from poor long-term stability and linearity, as well as considerable signal hysteresis. As an alternative, piezo-capacitive strain sensors with better stability, lower hysteresis, and higher stretchability have been suggested. But due to the fact that piezo-capacitive strain sensors exhibit limited sensitivity and strong electromagnetic interference caused by the conductive objects in the surrounding environment, these conventional stretchable strain sensors are still facing limitations that are yet to be resolved.
A KAIST research team led by Professor Inkyu Park from the Department of Mechanical Engineering suggested that an optical-type stretchable strain sensor can be a good alternative to resolve the limitations of conventional piezo-resistive and piezo-capacitive strain sensors, because they have high stability and are less affected by environmental disturbances. The team then introduced an optical wearable strain sensor based on the light transmittance changes of a CNT-embedded elastomer, which further addresses the low sensitivity problem of conventional optical stretchable strain sensors.
In order to achieve a large dynamic range for the sensor, Professor Park and his researchers chose Ecoflex as an elastomeric substrate with good mechanical durability, flexibility, and attachability on human skin, and the new optical wearable strain sensor developed by the research group actually shows a wide dynamic range of 0 to 400%.
In addition, the researchers propagated the microcracks under tensile strain within the film of multi-walled CNTs embedded in the Ecoflex substrate, changing the optical transmittance of the film. By doing so, it was possible for them to develop a wearable strain sensor having a sensitivity 10 times higher than conventional optical stretchable strain sensors.
The proposed sensor has also passed the durability test with excellent results. The sensor’s response after 13,000 sets of cyclic loading was stable without any noticeable drift. This suggests that the sensor response can be used without degradation, even if the sensor is repeatedly used for a long time and in various environmental conditions.
Using the developed sensor, the research team could measure the finger bending motion and used it for robot control. They also developed a three-axes sensor array for body posture monitoring. The sensor was able to monitor human motions with small strains such as a pulse near the carotid artery and muscle movement around the mouth during pronunciation.
Professor Park said, “In this study, our group developed a new wearable strain sensor platform that overcomes many limitations of previously developed resistive, capacitive, and optical-type stretchable strain sensors. Our sensor could be widely used in a variety of fields including soft robotics, wearable electronics, electronic skin, healthcare, and even entertainment.”
This work was supported by the National Research Foundation (NRF) of Korea.
Publication:
Jimin Gu, Donguk Kwon, Junseong Ahn, and Inkyu Park. (2020) “Wearable Strain sensors Using Light Transmittance Change of Carbon Nanotube-Embedded Elastomers with Microcracks” ACS Applied Materials & Interfaces. Volume 12. Issue 9. Available online at https://doi.org/10.1021/acsami.9b18069
Profile:
Inkyu Park
Professor
inkyu@kaist.ac.kr
http://mintlab1.kaist.ac.kr
Micro/Nano Transducers Laboratory (MINT Lab)
Department of Mechanical Engineering (ME)Korea Advanced Institute of Science and Technology (KAIST)
Profile:
Jimin Gu
Ph.D. Candidate
mint9411@kaist.ac.kr
http://mintlab1.kaist.ac.kr
MINT Lab
KAIST ME
(END)
2020.03.20 View 19175 -
 Two Professors Receive Awards from the Korea Robotics Society
< Professor Jee-Hwan Ryu and Professor Ayoung Kim >
The Korea Robotics Society (KROS) conferred awards onto two KAIST professors from the Department of Civil and Environmental Engineering in recognition of their achievements and contributions to the development of the robotics industry in 2019. Professor Jee-Hwan Ryu has been actively engaged in researching the field of teleoperation, and this led him to win the KROS Robotics Innovation (KRI) Award. The KRI Award was newly established in 2019 by the KROS, in order to encourage researchers who have made innovative achievements in robotics. Professor Ryu shared the honor of being the first winner of this award with Professor Jaeheung Park of Seoul National University. Professor Ayoung Kim, from the same department, received the Young Investigator Award presented to emerging robitics researchers under 40 years of age. (END)
2019.12.19 View 10683
Two Professors Receive Awards from the Korea Robotics Society
< Professor Jee-Hwan Ryu and Professor Ayoung Kim >
The Korea Robotics Society (KROS) conferred awards onto two KAIST professors from the Department of Civil and Environmental Engineering in recognition of their achievements and contributions to the development of the robotics industry in 2019. Professor Jee-Hwan Ryu has been actively engaged in researching the field of teleoperation, and this led him to win the KROS Robotics Innovation (KRI) Award. The KRI Award was newly established in 2019 by the KROS, in order to encourage researchers who have made innovative achievements in robotics. Professor Ryu shared the honor of being the first winner of this award with Professor Jaeheung Park of Seoul National University. Professor Ayoung Kim, from the same department, received the Young Investigator Award presented to emerging robitics researchers under 40 years of age. (END)
2019.12.19 View 10683 -
 Artificial Muscles Bloom, Dance, and Wave
Wearing a flower brooch that blooms before your eyes sounds like magic. KAIST researchers have made it real with robotic muscles.
Researchers have developed an ultrathin, artificial muscle for soft robotics. The advancement, recently reported in the journal Science Robotics, was demonstrated with a robotic blooming flower brooch, dancing robotic butterflies and fluttering tree leaves on a kinetic art piece.
The robotic equivalent of a muscle that can move is called an actuator. The actuator expands, contracts or rotates like muscle fibers using a stimulus such as electricity. Engineers around the world are striving to develop more dynamic actuators that respond quickly, can bend without breaking, and are very durable. Soft, robotic muscles could have a wide variety of applications, from wearable electronics to advanced prosthetics.
The team from KAIST’s Creative Research Initiative Center for Functionally Antagonistic Nano-Engineering developed a very thin, responsive, flexible and durable artificial muscle. The actuator looks like a skinny strip of paper about an inch long. They used a particular type of material called MXene, which is class of compounds that have layers only a few atoms thick.
Their chosen MXene material (T3C2Tx) is made of thin layers of titanium and carbon compounds. It was not flexible by itself; sheets of material would flake off the actuator when bent in a loop. That changed when the MXene was “ionically cross-linked” — connected through an ionic bond — to a synthetic polymer. The combination of materials made the actuator flexible, while still maintaining strength and conductivity, which is critical for movements driven by electricity.
Their particular combination performed better than others reported. Their actuator responded very quickly to low voltage, and lasted for more than five hours moving continuously.
To prove the tiny robotic muscle works, the team incorporated the actuator into wearable art: an origami-inspired brooch mimics how a narcissus flower unfolds its petals when a small amount of electricity is applied. They also designed robotic butterflies that move their wings up and down, and made the leaves of a tree sculpture flutter.
“Wearable robotics and kinetic art demonstrate how robotic muscles can have fun and beautiful applications,” said Il-Kwon Oh, lead paper author and professor of mechanical engineering. “It also shows the enormous potential for small, artificial muscles for a variety of uses, such as haptic feedback systems and active biomedical devices.”
The team next plans to investigate more practical applications of MXene-based soft actuators and other engineering applications of MXene 2D nanomaterials.
2019.08.22 View 25328
Artificial Muscles Bloom, Dance, and Wave
Wearing a flower brooch that blooms before your eyes sounds like magic. KAIST researchers have made it real with robotic muscles.
Researchers have developed an ultrathin, artificial muscle for soft robotics. The advancement, recently reported in the journal Science Robotics, was demonstrated with a robotic blooming flower brooch, dancing robotic butterflies and fluttering tree leaves on a kinetic art piece.
The robotic equivalent of a muscle that can move is called an actuator. The actuator expands, contracts or rotates like muscle fibers using a stimulus such as electricity. Engineers around the world are striving to develop more dynamic actuators that respond quickly, can bend without breaking, and are very durable. Soft, robotic muscles could have a wide variety of applications, from wearable electronics to advanced prosthetics.
The team from KAIST’s Creative Research Initiative Center for Functionally Antagonistic Nano-Engineering developed a very thin, responsive, flexible and durable artificial muscle. The actuator looks like a skinny strip of paper about an inch long. They used a particular type of material called MXene, which is class of compounds that have layers only a few atoms thick.
Their chosen MXene material (T3C2Tx) is made of thin layers of titanium and carbon compounds. It was not flexible by itself; sheets of material would flake off the actuator when bent in a loop. That changed when the MXene was “ionically cross-linked” — connected through an ionic bond — to a synthetic polymer. The combination of materials made the actuator flexible, while still maintaining strength and conductivity, which is critical for movements driven by electricity.
Their particular combination performed better than others reported. Their actuator responded very quickly to low voltage, and lasted for more than five hours moving continuously.
To prove the tiny robotic muscle works, the team incorporated the actuator into wearable art: an origami-inspired brooch mimics how a narcissus flower unfolds its petals when a small amount of electricity is applied. They also designed robotic butterflies that move their wings up and down, and made the leaves of a tree sculpture flutter.
“Wearable robotics and kinetic art demonstrate how robotic muscles can have fun and beautiful applications,” said Il-Kwon Oh, lead paper author and professor of mechanical engineering. “It also shows the enormous potential for small, artificial muscles for a variety of uses, such as haptic feedback systems and active biomedical devices.”
The team next plans to investigate more practical applications of MXene-based soft actuators and other engineering applications of MXene 2D nanomaterials.
2019.08.22 View 25328 -
 Wearable Robot 'WalkON Suit' Off to Cybathlon 2020
Standing upright and walking alone are very simple but noble motions that separate humans from many other creatures. Wearable and prosthetic technologies have emerged to augment human function in locomotion and manipulation. However, advances in wearable robot technology have been especially momentous to Byoung-Wook Kim, a triplegic for 22 years following a devastating car accident.
Kim rejoiced after standing upright and walking again by putting on the ‘WalkON Suit,’ the wearable robot developed by Professor Kyoungchul Kong’s team. Even more, Kim won third prize in the powered exoskeleton race at Cybathlon 2016, an international cyborg Olympics hosted by ETH Zurich.
Now Kim and Professor Kong’s team are all geared up for the Cybathlon Championship 2020. Professor Kong and his startup, Angel Robotics, held a kickoff ceremony for Cybathlon 2020 at KAIST on June 24. The 2020 championship will take place in Switzerland.
Only pilots with complete paralysis of the legs resulting from spinal cord injuries are eligible to participate in the Cybathlon, which takes place every four years. Pilots compete against each other while completing everyday tasks using technical assistance systems in six different disciplines: a brain-computer interface race, a functional electrical stimulation bike race, a powered arm prosthesis race, a powered leg prosthesis race, a powered exoskeleton race, and a powered wheelchair race. The 2016 championship drew 66 pilots from 56 teams representing 25 countries.
In the powered exoskeleton race, pilots complete everyday activities such as getting up from a sofa and overcoming obstacles such as stairs, ramps, or slopes and up to four pilots compete simultaneously on tracks to solve six tasks; and the pilot that solves the most tasks in the least amount of time wins the race.
(Kim, a triplegic for 22 years demonstrates walking and climbing the stairs (below photo) wearing the WalkOn Suit during the media day on June 21 at KAIST.)
Kim, who demonstrated walking and climbing the stairs wearing the WalkON Suit during the media day for the Cybathlon 2020 kickoff ceremony on June 21 at KAIST, said, “I have been confined to a wheelchair for more than 20 years. I am used to it so I feel like the wheelchair is one of my body parts. Actually, I don’t feel any big difficulties in doing everyday tasks in wheelchair. But whenever I face the fact that I will never be able to stand up with my own two legs again, I am so devastated.” He continued, “I still remember the day when I stood up with my own two legs by myself after 22 years. It was beyond description.”
The market for wearable robots, especially for exoskeleton robots, is continuing to grow as the aging population has been a major challenge in almost every advanced country. The global market for these robots expects to see annual growth of 41.2% to 8.3 billion US dollars by 2025. Healthcare wearable robots for the elderly and rehabilitation take up the half of the market share followed by wearable robots for industrial and defense purposes.
Professor Kong from the Department of Mechanical Engineering and his colleagues have developed two wearable robot systems in 2014: The "WalkON Suit" for complete paraplegics and “Angel Suit” for those with partial impairment in walking ability such as the elderly and rehabilitation patients.
Professor Kong said after 15 years of basic research, the team is now able to develop its own distinct technologies. He said their robots are powered by non-resistant precision drives with algorithms recognizing the user’s moving intention. Incorporated with prosthetic devices technology from the Severance Rehabilitation Hospital, their control technology has led to the production of a customizable robot suit optimized for each user’s physical condition.
The WalkON Suit, which boasts a maximum force of 250 Nm and maximum rotation speed of 45 RPM, gives the user high-energy efficiency modeled after the physiology of the human leg. It allows users to walk on flat ground and down stairs, climb up and down inclines, and sit and lie down. Currently the battery lasts five to six hours for locomotion and the approximate 25 kg of robot weight still remains a technical challenge to upgrade.
Professor Kong’s team has grafted AR glass technology into the WalkOn Suit that one of his pilots put on for the torch relay of the PyongChang Paralympics in 2018. His team is now upgrading the WalkON Suit 4.0 for next year’s competition. Severance Rehabilitation Hospital will help the seven pilots with their training.
Professor Kong said his goal is to make robots that can make people with disabilities much more independent. He stressed, “Wearable robots should be designed for each single user. We provide a very good graphical user interface so that we can design, check, and also verify our optimized design for users’ best performance.”
(Seven pilots and Professor Kong (fifth from left in second row) pose with guests who joined the Cybathlon 2020 kickoff ceremony. President Shin (fifth from right) made a congratulatory remarks during the ceremony.)
2019.06.25 View 41038
Wearable Robot 'WalkON Suit' Off to Cybathlon 2020
Standing upright and walking alone are very simple but noble motions that separate humans from many other creatures. Wearable and prosthetic technologies have emerged to augment human function in locomotion and manipulation. However, advances in wearable robot technology have been especially momentous to Byoung-Wook Kim, a triplegic for 22 years following a devastating car accident.
Kim rejoiced after standing upright and walking again by putting on the ‘WalkON Suit,’ the wearable robot developed by Professor Kyoungchul Kong’s team. Even more, Kim won third prize in the powered exoskeleton race at Cybathlon 2016, an international cyborg Olympics hosted by ETH Zurich.
Now Kim and Professor Kong’s team are all geared up for the Cybathlon Championship 2020. Professor Kong and his startup, Angel Robotics, held a kickoff ceremony for Cybathlon 2020 at KAIST on June 24. The 2020 championship will take place in Switzerland.
Only pilots with complete paralysis of the legs resulting from spinal cord injuries are eligible to participate in the Cybathlon, which takes place every four years. Pilots compete against each other while completing everyday tasks using technical assistance systems in six different disciplines: a brain-computer interface race, a functional electrical stimulation bike race, a powered arm prosthesis race, a powered leg prosthesis race, a powered exoskeleton race, and a powered wheelchair race. The 2016 championship drew 66 pilots from 56 teams representing 25 countries.
In the powered exoskeleton race, pilots complete everyday activities such as getting up from a sofa and overcoming obstacles such as stairs, ramps, or slopes and up to four pilots compete simultaneously on tracks to solve six tasks; and the pilot that solves the most tasks in the least amount of time wins the race.
(Kim, a triplegic for 22 years demonstrates walking and climbing the stairs (below photo) wearing the WalkOn Suit during the media day on June 21 at KAIST.)
Kim, who demonstrated walking and climbing the stairs wearing the WalkON Suit during the media day for the Cybathlon 2020 kickoff ceremony on June 21 at KAIST, said, “I have been confined to a wheelchair for more than 20 years. I am used to it so I feel like the wheelchair is one of my body parts. Actually, I don’t feel any big difficulties in doing everyday tasks in wheelchair. But whenever I face the fact that I will never be able to stand up with my own two legs again, I am so devastated.” He continued, “I still remember the day when I stood up with my own two legs by myself after 22 years. It was beyond description.”
The market for wearable robots, especially for exoskeleton robots, is continuing to grow as the aging population has been a major challenge in almost every advanced country. The global market for these robots expects to see annual growth of 41.2% to 8.3 billion US dollars by 2025. Healthcare wearable robots for the elderly and rehabilitation take up the half of the market share followed by wearable robots for industrial and defense purposes.
Professor Kong from the Department of Mechanical Engineering and his colleagues have developed two wearable robot systems in 2014: The "WalkON Suit" for complete paraplegics and “Angel Suit” for those with partial impairment in walking ability such as the elderly and rehabilitation patients.
Professor Kong said after 15 years of basic research, the team is now able to develop its own distinct technologies. He said their robots are powered by non-resistant precision drives with algorithms recognizing the user’s moving intention. Incorporated with prosthetic devices technology from the Severance Rehabilitation Hospital, their control technology has led to the production of a customizable robot suit optimized for each user’s physical condition.
The WalkON Suit, which boasts a maximum force of 250 Nm and maximum rotation speed of 45 RPM, gives the user high-energy efficiency modeled after the physiology of the human leg. It allows users to walk on flat ground and down stairs, climb up and down inclines, and sit and lie down. Currently the battery lasts five to six hours for locomotion and the approximate 25 kg of robot weight still remains a technical challenge to upgrade.
Professor Kong’s team has grafted AR glass technology into the WalkOn Suit that one of his pilots put on for the torch relay of the PyongChang Paralympics in 2018. His team is now upgrading the WalkON Suit 4.0 for next year’s competition. Severance Rehabilitation Hospital will help the seven pilots with their training.
Professor Kong said his goal is to make robots that can make people with disabilities much more independent. He stressed, “Wearable robots should be designed for each single user. We provide a very good graphical user interface so that we can design, check, and also verify our optimized design for users’ best performance.”
(Seven pilots and Professor Kong (fifth from left in second row) pose with guests who joined the Cybathlon 2020 kickoff ceremony. President Shin (fifth from right) made a congratulatory remarks during the ceremony.)
2019.06.25 View 41038 -
 KAIST to Host the 2017 AI World Cup in November
KAIST, the birthplace of the Robot World Cup in 1996, now presents a new technology matchup, the AI World Cup this November, which will be held at KAIST. The event is being organized by the Machine Intelligence and Robotics Multi-Sponsored Research and Education Platform (MIR-MSREP) of KAIST. The online, simulated AI soccer game, based on rolling updates, will be a draw for avid online gamers and tech-savvy university students from around the nation.
The tournament is comprised of three events: ▲A 5 on 5 AI soccer match to be played after self-learning using AI technology in an online simulation environment ▲Commentary in which online soccer videos are analyzed and commented on, and ▲Game reporters who will write articles on online soccer event results.
The participants will undergo a month-long online practice period in October and compete in preliminary matches from November 1 through 24. The top teams that scored the highest accumulated points will compete in the finals on December 1. In the finals, each team’s AI technology implementation method will be evaluated to select the final winning team. To ensure a successful event, KAIST will host a briefing session for participants on July 28.
Technological prowess and early exposure to AI accumulated at KAIST led to the launching of this tournament. Professor Jong-Hwan Kim, the chair of the Organizing Committee of the AI World Cup, hosted the first ever Robot World Cup back in 1996. His concept has now evolved into the emerging technology of AI and the members of the Organizing Committee encompass the professors from the various departments of electrical engineering, computing, industrial and systems engineering, aerospace engineering, civil and environmental engineering, and the graduate schools of Green Transportation, Cultural Technology, and Science and Technology Policy.
In particular, ongoing convergence research initiatives incorporating AI into a wide arrays of disciplines such as bio, nano, and IT, played a crucial role for making this AI World Cup happen. Professor Kim said, “The winner of this year’s competition will be awarded a certificate and a small gift. In 2018, we aim to expand the event to an international scale by allowing international teams.”
Any undergraduate or graduate student in Korea can apply to participate in the ‘AI World Cup 2017’. KAIST will host a public trial event during the ‘Open KAIST’ event period to be held November 2-3 to help participating students understand the event better. ‘Open KAIST’ allows the general public to personally visit and experience what goes on in engineering departments and laboratories on the KAIST main campus. It is hosted by the College of Engineering every two years and is the largest event hosted by KAIST.
To participate in the ‘AI World Cup 2017,’ teams consisting of Korean undergraduates or graduate students can fill out application forms and submit them by September 30 on http://mir.kaist.ac.kr .
2017.07.14 View 11897
KAIST to Host the 2017 AI World Cup in November
KAIST, the birthplace of the Robot World Cup in 1996, now presents a new technology matchup, the AI World Cup this November, which will be held at KAIST. The event is being organized by the Machine Intelligence and Robotics Multi-Sponsored Research and Education Platform (MIR-MSREP) of KAIST. The online, simulated AI soccer game, based on rolling updates, will be a draw for avid online gamers and tech-savvy university students from around the nation.
The tournament is comprised of three events: ▲A 5 on 5 AI soccer match to be played after self-learning using AI technology in an online simulation environment ▲Commentary in which online soccer videos are analyzed and commented on, and ▲Game reporters who will write articles on online soccer event results.
The participants will undergo a month-long online practice period in October and compete in preliminary matches from November 1 through 24. The top teams that scored the highest accumulated points will compete in the finals on December 1. In the finals, each team’s AI technology implementation method will be evaluated to select the final winning team. To ensure a successful event, KAIST will host a briefing session for participants on July 28.
Technological prowess and early exposure to AI accumulated at KAIST led to the launching of this tournament. Professor Jong-Hwan Kim, the chair of the Organizing Committee of the AI World Cup, hosted the first ever Robot World Cup back in 1996. His concept has now evolved into the emerging technology of AI and the members of the Organizing Committee encompass the professors from the various departments of electrical engineering, computing, industrial and systems engineering, aerospace engineering, civil and environmental engineering, and the graduate schools of Green Transportation, Cultural Technology, and Science and Technology Policy.
In particular, ongoing convergence research initiatives incorporating AI into a wide arrays of disciplines such as bio, nano, and IT, played a crucial role for making this AI World Cup happen. Professor Kim said, “The winner of this year’s competition will be awarded a certificate and a small gift. In 2018, we aim to expand the event to an international scale by allowing international teams.”
Any undergraduate or graduate student in Korea can apply to participate in the ‘AI World Cup 2017’. KAIST will host a public trial event during the ‘Open KAIST’ event period to be held November 2-3 to help participating students understand the event better. ‘Open KAIST’ allows the general public to personally visit and experience what goes on in engineering departments and laboratories on the KAIST main campus. It is hosted by the College of Engineering every two years and is the largest event hosted by KAIST.
To participate in the ‘AI World Cup 2017,’ teams consisting of Korean undergraduates or graduate students can fill out application forms and submit them by September 30 on http://mir.kaist.ac.kr .
2017.07.14 View 11897 -
 Global Workshop on the Risks of Emerging Technologies
The Center for Science, Policy and Society (CSPS) at the Graduate School of Science and Technology Policy of KAIST will host the 2017 Global Expert Workshop on the Risks of Emerging Technologies Driving the Fourth Industrial Revolution March 17-18 at the Plaza Hotel in Seoul.
At the workshop, experts from public and private sectors at home and abroad will address the socio-economic impacts and implications of the emergence of new technologies that the Fourth Industrial Revolution will bring about. The workshop will be hosted in collaboration with the World Economic Forum’s Global Future Council (GFC) on Technology, Values and Policy. The World Economic Forum’s network of GFCs is the world’s foremost interdisciplinary knowledge network dedicated to promoting innovative thinking about the future.
Four keynote speakers, including Professor Wendell Wallach of the Interdisciplinary Center for Bioethics at Yale University and Dean of the School of Public Policy and Management at Tsinghua University Lan Xue, will deliver speeches. Professor Wallach is the leader of an AI/Robotics Global Governance Project sponsored by the World Economic Forum and will make a speech entitled “Build the Global Infrastructure to Make Sure that AI and Robotics Will Be Beneficial.” Dean Xue, a member of the World Economic Forum’s GFC on Tech, Values, and Policy, is well known for his analysis of the social implications of the risks brought about by emerging technologies. He will speak on “Global Risk Governance of Disruptive 4IR Technologies.”
More than thirty experts will participate in the workshop. Speakers include the KAIST Vice President for Planning and Budget Soohyun Kim, Dean of KAIST Institute San Yup Lee, Professor Jaeseung Jeong of the Department of Bio and Brain Engineering at KAIST, Dr. Sung Chul Kang of the KIST Healthcare Robotics Research Group, and Korea Evaluation Institute of Industrial Technology Program Director Kyong Hoon Kim.
The CSPS of KAIST will continue to make collaborative research efforts with the GFC for developing new insights and perspectives on key global systems as well as study the impact and governance of key emerging technologies.
2017.03.16 View 10670
Global Workshop on the Risks of Emerging Technologies
The Center for Science, Policy and Society (CSPS) at the Graduate School of Science and Technology Policy of KAIST will host the 2017 Global Expert Workshop on the Risks of Emerging Technologies Driving the Fourth Industrial Revolution March 17-18 at the Plaza Hotel in Seoul.
At the workshop, experts from public and private sectors at home and abroad will address the socio-economic impacts and implications of the emergence of new technologies that the Fourth Industrial Revolution will bring about. The workshop will be hosted in collaboration with the World Economic Forum’s Global Future Council (GFC) on Technology, Values and Policy. The World Economic Forum’s network of GFCs is the world’s foremost interdisciplinary knowledge network dedicated to promoting innovative thinking about the future.
Four keynote speakers, including Professor Wendell Wallach of the Interdisciplinary Center for Bioethics at Yale University and Dean of the School of Public Policy and Management at Tsinghua University Lan Xue, will deliver speeches. Professor Wallach is the leader of an AI/Robotics Global Governance Project sponsored by the World Economic Forum and will make a speech entitled “Build the Global Infrastructure to Make Sure that AI and Robotics Will Be Beneficial.” Dean Xue, a member of the World Economic Forum’s GFC on Tech, Values, and Policy, is well known for his analysis of the social implications of the risks brought about by emerging technologies. He will speak on “Global Risk Governance of Disruptive 4IR Technologies.”
More than thirty experts will participate in the workshop. Speakers include the KAIST Vice President for Planning and Budget Soohyun Kim, Dean of KAIST Institute San Yup Lee, Professor Jaeseung Jeong of the Department of Bio and Brain Engineering at KAIST, Dr. Sung Chul Kang of the KIST Healthcare Robotics Research Group, and Korea Evaluation Institute of Industrial Technology Program Director Kyong Hoon Kim.
The CSPS of KAIST will continue to make collaborative research efforts with the GFC for developing new insights and perspectives on key global systems as well as study the impact and governance of key emerging technologies.
2017.03.16 View 10670 -
 Professor Kwon to Represent the Asia-Pacific Region of the IEEE RAS
Professor Dong-Soon Kwon of the Mechanical Engineering Department at KAIST has been reappointed to the Administrative Committee of the Institute of Electrical and Electronics Engineers (IEEE) Robotics and Automation Society (IEEE RAS). Beginning January 1, 2017, he will serve his second three-year term, which will end in 2019. In 2014, he was the first Korean appointed to the committee, representing the Asia-Pacific community of the IEEE Society.
Professor Kwon said, “I feel thankful but, at the same time, it is a great responsibility to serve the Asian research community within the Society. I hope I can contribute to the development of robotics engineering in the region and in Korea as well.”
Consisted of 18 elected members, the administrative committee manages the major activities of IEEE RAS including hosting its annual flagship meeting, the International Conference on Robotics and Automation.
The IEEE RAS fosters the advancement in the theory and practice of robotics and automation engineering and facilitates the exchange of scientific and technological knowledge that supports the maintenance of high professional standards among its members.
2016.12.06 View 10240
Professor Kwon to Represent the Asia-Pacific Region of the IEEE RAS
Professor Dong-Soon Kwon of the Mechanical Engineering Department at KAIST has been reappointed to the Administrative Committee of the Institute of Electrical and Electronics Engineers (IEEE) Robotics and Automation Society (IEEE RAS). Beginning January 1, 2017, he will serve his second three-year term, which will end in 2019. In 2014, he was the first Korean appointed to the committee, representing the Asia-Pacific community of the IEEE Society.
Professor Kwon said, “I feel thankful but, at the same time, it is a great responsibility to serve the Asian research community within the Society. I hope I can contribute to the development of robotics engineering in the region and in Korea as well.”
Consisted of 18 elected members, the administrative committee manages the major activities of IEEE RAS including hosting its annual flagship meeting, the International Conference on Robotics and Automation.
The IEEE RAS fosters the advancement in the theory and practice of robotics and automation engineering and facilitates the exchange of scientific and technological knowledge that supports the maintenance of high professional standards among its members.
2016.12.06 View 10240