AR
-
 KAIST Develops AI to Easily Find Promising Materials That Capture Only CO₂
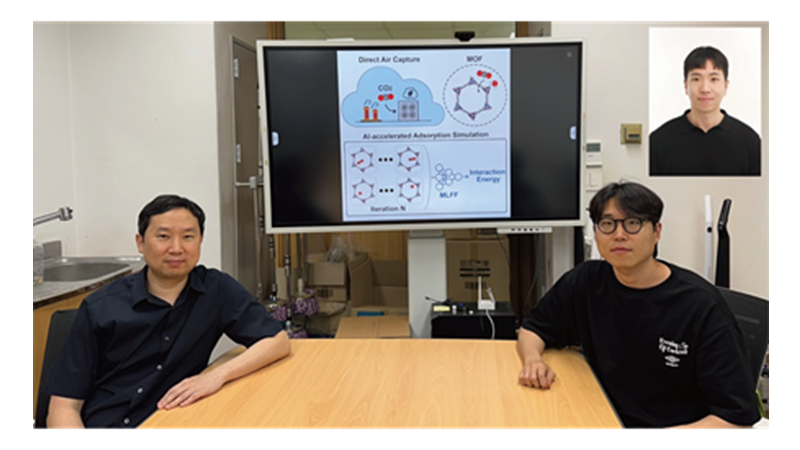
< Photo 1. (From left) Professor Jihan Kim, Ph.D. candidate Yunsung Lim and Dr. Hyunsoo Park of the Department of Chemical and Biomolecular Engineering >
In order to help prevent the climate crisis, actively reducing already-emitted CO₂ is essential. Accordingly, direct air capture (DAC) — a technology that directly extracts only CO₂ from the air — is gaining attention. However, effectively capturing pure CO₂ is not easy due to water vapor (H₂O) present in the air. KAIST researchers have successfully used AI-driven machine learning techniques to identify the most promising CO₂-capturing materials among metal-organic frameworks (MOFs), a key class of materials studied for this technology.
KAIST (President Kwang Hyung Lee) announced on the 29th of June that a research team led by Professor Jihan Kim from the Department of Chemical and Biomolecular Engineering, in collaboration with a team at Imperial College London, has developed a machine-learning-based simulation method that can quickly and accurately screen MOFs best suited for atmospheric CO₂ capture.
< Figure 1. Concept diagram of Direct Air Capture (DAC) technology and carbon capture using Metal-Organic Frameworks (MOFs). MOFs are promising porous materials capable of capturing carbon dioxide from the atmosphere, drawing attention as a core material for DAC technology. >
To overcome the difficulty of discovering high-performance materials due to the complexity of structures and the limitations of predicting intermolecular interactions, the research team developed a machine learning force field (MLFF) capable of precisely predicting the interactions between CO₂, water (H₂O), and MOFs. This new method enables calculations of MOF adsorption properties with quantum-mechanics-level accuracy at vastly faster speeds than before.
Using this system, the team screened over 8,000 experimentally synthesized MOF structures, identifying more than 100 promising candidates for CO₂ capture. Notably, this included new candidates that had not been uncovered by traditional force-field-based simulations. The team also analyzed the relationships between MOF chemical structure and adsorption performance, proposing seven key chemical features that will help in designing new materials for DAC.
< Figure 2. Concept diagram of adsorption simulation using Machine Learning Force Field (MLFF). The developed MLFF is applicable to various MOF structures and allows for precise calculation of adsorption properties by predicting interaction energies during repetitive Widom insertion simulations. It is characterized by simultaneously achieving high accuracy and low computational cost compared to conventional classical force fields. >
This research is recognized as a significant advance in the DAC field, greatly enhancing materials design and simulation by precisely predicting MOF-CO₂ and MOF-H₂O interactions.
The results of this research, with Ph.D. candidate Yunsung Lim and Dr. Hyunsoo Park of KAIST as co-first authors, were published in the international academic journal Matter on June 12.
※Paper Title: Accelerating CO₂ direct air capture screening for metal–organic frameworks with a transferable machine learning force field
※DOI: 10.1016/j.matt.2025.102203
This research was supported by the Saudi Aramco-KAIST CO₂ Management Center and the Ministry of Science and ICT's Global C.L.E.A.N. Project.
2025.06.29 View 275
KAIST Develops AI to Easily Find Promising Materials That Capture Only CO₂
< Photo 1. (From left) Professor Jihan Kim, Ph.D. candidate Yunsung Lim and Dr. Hyunsoo Park of the Department of Chemical and Biomolecular Engineering >
In order to help prevent the climate crisis, actively reducing already-emitted CO₂ is essential. Accordingly, direct air capture (DAC) — a technology that directly extracts only CO₂ from the air — is gaining attention. However, effectively capturing pure CO₂ is not easy due to water vapor (H₂O) present in the air. KAIST researchers have successfully used AI-driven machine learning techniques to identify the most promising CO₂-capturing materials among metal-organic frameworks (MOFs), a key class of materials studied for this technology.
KAIST (President Kwang Hyung Lee) announced on the 29th of June that a research team led by Professor Jihan Kim from the Department of Chemical and Biomolecular Engineering, in collaboration with a team at Imperial College London, has developed a machine-learning-based simulation method that can quickly and accurately screen MOFs best suited for atmospheric CO₂ capture.
< Figure 1. Concept diagram of Direct Air Capture (DAC) technology and carbon capture using Metal-Organic Frameworks (MOFs). MOFs are promising porous materials capable of capturing carbon dioxide from the atmosphere, drawing attention as a core material for DAC technology. >
To overcome the difficulty of discovering high-performance materials due to the complexity of structures and the limitations of predicting intermolecular interactions, the research team developed a machine learning force field (MLFF) capable of precisely predicting the interactions between CO₂, water (H₂O), and MOFs. This new method enables calculations of MOF adsorption properties with quantum-mechanics-level accuracy at vastly faster speeds than before.
Using this system, the team screened over 8,000 experimentally synthesized MOF structures, identifying more than 100 promising candidates for CO₂ capture. Notably, this included new candidates that had not been uncovered by traditional force-field-based simulations. The team also analyzed the relationships between MOF chemical structure and adsorption performance, proposing seven key chemical features that will help in designing new materials for DAC.
< Figure 2. Concept diagram of adsorption simulation using Machine Learning Force Field (MLFF). The developed MLFF is applicable to various MOF structures and allows for precise calculation of adsorption properties by predicting interaction energies during repetitive Widom insertion simulations. It is characterized by simultaneously achieving high accuracy and low computational cost compared to conventional classical force fields. >
This research is recognized as a significant advance in the DAC field, greatly enhancing materials design and simulation by precisely predicting MOF-CO₂ and MOF-H₂O interactions.
The results of this research, with Ph.D. candidate Yunsung Lim and Dr. Hyunsoo Park of KAIST as co-first authors, were published in the international academic journal Matter on June 12.
※Paper Title: Accelerating CO₂ direct air capture screening for metal–organic frameworks with a transferable machine learning force field
※DOI: 10.1016/j.matt.2025.102203
This research was supported by the Saudi Aramco-KAIST CO₂ Management Center and the Ministry of Science and ICT's Global C.L.E.A.N. Project.
2025.06.29 View 275 -
 KAIST Invites World-Renowned Scholars, Elevating Global Competitiveness
< Photo 1. (From left) Professor John Rogers, Professor Gregg Rothermel, Dr. Sang H. Choi >
KAIST announced on June 27th that it has appointed three world-renowned scholars, including Professor John A. Rogers of Northwestern University, USA, as Invited Distinguished Professors in key departments such as Materials Science and Engineering.
Professor John A. Rogers (Northwestern University, USA) will be working with the Department of Materials Science and Engineering from July 2025 to June 2028 with Professor Gregg Rothermel (North Carolina State University, USA) working with the School of Computing from August 2025 to July 2026, and Dr. Sang H. Choi (NASA Langley Research Center, USA) with the Department of Aerospace Engineering from May 2025 to April 2028.
Professor John A. Rogers, a person of global authority in the field of bio-integrated electronics, has been leading advanced convergence technologies such as flexible electronics, smart skin, and implantable sensors. His significant impact on academia and industry is evident through over 900 papers published in top-tier academic journals like Science, Nature, and Cell, and he comes in an H-index of 240*. His research group, the Rogers Research Group at Northwestern University, focuses on "Science that brings Solutions to Society," encompassing areas such as bio-integrated microsystems and unconventional nanofabrication techniques. He is the founding Director of the Querrey-Simpson Institute of Bioelectronics at Northwestern University.
* H-index 240: An H-index is a measurement used to assess the research productivity and impact of an individual authors. H-index 240 means that 240 or more papers have been cited at least 240 times each, indicating a significant impact and the presumable status as a world-class scholar.
The Department of Materials Science and Engineering plans to further enhance its research capabilities in next-generation bio-implantable materials and wearable devices and boost its global competitiveness through the invitation of Professor Rogers. In particular, it aims to create strong research synergies by linking with the development of bio-convergence interface materials, a core task of the Leading Research Center (ERC, total research budget of 13.5 billion KRW over 7 years) led by Professor Kun-Jae Lee.
Professor Gregg Rothermel, a world-renowned scholar in software engineering, was ranked second among the top 50 global researchers by Communications of the ACM. For over 30 years, he has conducted practical research to improve software reliability and quality. He has achieved influential research outcomes through collaborations with global companies such as Boeing, Microsoft, and Lockheed Martin. Dr. Rothermel's research at North Carolina State University focuses on software engineering and program analysis, with significant contributions through initiatives like the ESQuaReD Laboratory and the Software-Artifact Infrastructure Repository (SIR).
The School of Computing plans to strengthen its research capabilities in software engineering and conduct collaborative research on software design and testing to enhance the reliability and safety of AI-based software systems through the invitation of Professor Gregg Rothermel. In particular, he is expected to participate in the Big Data Edge-Cloud Service Research Center (ITRC, total research budget of 6.7 billion KRW over 8 years) led by Professor In-Young Ko of the School of Computing, and the Research on Improving Complex Mobility Safety (SafetyOps, Digital Columbus Project, total research budget of 3.5 billion KRW over 8 years), contributing to resolving uncertainties in machine learning-based AI software and advancing technology.
Dr. Sang H. Choi, a global expert in space exploration and energy harvesting, has worked at NASA Langley Research Center for over 40 years, authoring over 200 papers and reports, holding 45 patents, and receiving 71 awards from NASA. In 2022, he was inducted into the 'Inventors Hall of Fame' as part of NASA's Technology Transfer Program. This is a rare honor, recognizing researchers who have contributed to the private sector dissemination of space exploration technology, with only 35 individuals worldwide selected to date. Dr. Choi's extensive work at NASA includes research on advanced electronic and energetic materials, satellite sensors, and various nano-technologies.
Dr. Choi plans to collaborate with Associate Professor Hyun-Jung Kim (former NASA Research Scientist, 2009-2024), who joined the Department of Aerospace Engineering in September of 2024, to lead the development of core technologies for lunar exploration (energy sources, sensing, in-situ resource utilization ISRU).
KAIST President Kwang Hyung Lee stated, "It is very meaningful to be able to invite these world-class scholars. Through these appointments, KAIST will further strengthen its global competitiveness in research in the fields of advanced convergence technology such as bio-convergence electronics, AI software engineering, and space exploration, securing our position as the leader of global innovations."
2025.06.27 View 416
KAIST Invites World-Renowned Scholars, Elevating Global Competitiveness
< Photo 1. (From left) Professor John Rogers, Professor Gregg Rothermel, Dr. Sang H. Choi >
KAIST announced on June 27th that it has appointed three world-renowned scholars, including Professor John A. Rogers of Northwestern University, USA, as Invited Distinguished Professors in key departments such as Materials Science and Engineering.
Professor John A. Rogers (Northwestern University, USA) will be working with the Department of Materials Science and Engineering from July 2025 to June 2028 with Professor Gregg Rothermel (North Carolina State University, USA) working with the School of Computing from August 2025 to July 2026, and Dr. Sang H. Choi (NASA Langley Research Center, USA) with the Department of Aerospace Engineering from May 2025 to April 2028.
Professor John A. Rogers, a person of global authority in the field of bio-integrated electronics, has been leading advanced convergence technologies such as flexible electronics, smart skin, and implantable sensors. His significant impact on academia and industry is evident through over 900 papers published in top-tier academic journals like Science, Nature, and Cell, and he comes in an H-index of 240*. His research group, the Rogers Research Group at Northwestern University, focuses on "Science that brings Solutions to Society," encompassing areas such as bio-integrated microsystems and unconventional nanofabrication techniques. He is the founding Director of the Querrey-Simpson Institute of Bioelectronics at Northwestern University.
* H-index 240: An H-index is a measurement used to assess the research productivity and impact of an individual authors. H-index 240 means that 240 or more papers have been cited at least 240 times each, indicating a significant impact and the presumable status as a world-class scholar.
The Department of Materials Science and Engineering plans to further enhance its research capabilities in next-generation bio-implantable materials and wearable devices and boost its global competitiveness through the invitation of Professor Rogers. In particular, it aims to create strong research synergies by linking with the development of bio-convergence interface materials, a core task of the Leading Research Center (ERC, total research budget of 13.5 billion KRW over 7 years) led by Professor Kun-Jae Lee.
Professor Gregg Rothermel, a world-renowned scholar in software engineering, was ranked second among the top 50 global researchers by Communications of the ACM. For over 30 years, he has conducted practical research to improve software reliability and quality. He has achieved influential research outcomes through collaborations with global companies such as Boeing, Microsoft, and Lockheed Martin. Dr. Rothermel's research at North Carolina State University focuses on software engineering and program analysis, with significant contributions through initiatives like the ESQuaReD Laboratory and the Software-Artifact Infrastructure Repository (SIR).
The School of Computing plans to strengthen its research capabilities in software engineering and conduct collaborative research on software design and testing to enhance the reliability and safety of AI-based software systems through the invitation of Professor Gregg Rothermel. In particular, he is expected to participate in the Big Data Edge-Cloud Service Research Center (ITRC, total research budget of 6.7 billion KRW over 8 years) led by Professor In-Young Ko of the School of Computing, and the Research on Improving Complex Mobility Safety (SafetyOps, Digital Columbus Project, total research budget of 3.5 billion KRW over 8 years), contributing to resolving uncertainties in machine learning-based AI software and advancing technology.
Dr. Sang H. Choi, a global expert in space exploration and energy harvesting, has worked at NASA Langley Research Center for over 40 years, authoring over 200 papers and reports, holding 45 patents, and receiving 71 awards from NASA. In 2022, he was inducted into the 'Inventors Hall of Fame' as part of NASA's Technology Transfer Program. This is a rare honor, recognizing researchers who have contributed to the private sector dissemination of space exploration technology, with only 35 individuals worldwide selected to date. Dr. Choi's extensive work at NASA includes research on advanced electronic and energetic materials, satellite sensors, and various nano-technologies.
Dr. Choi plans to collaborate with Associate Professor Hyun-Jung Kim (former NASA Research Scientist, 2009-2024), who joined the Department of Aerospace Engineering in September of 2024, to lead the development of core technologies for lunar exploration (energy sources, sensing, in-situ resource utilization ISRU).
KAIST President Kwang Hyung Lee stated, "It is very meaningful to be able to invite these world-class scholars. Through these appointments, KAIST will further strengthen its global competitiveness in research in the fields of advanced convergence technology such as bio-convergence electronics, AI software engineering, and space exploration, securing our position as the leader of global innovations."
2025.06.27 View 416 -
 New and Highly Efficient Recycling Technology to Turn Used Tires into Raw Materials for Rubber and Nylon
< (From left) Kyungmin Choi (MS-Ph.D. integrated course, Department of Chemistry), Dr. Beomsoon Park, Professor Soon Hyeok Hong, Dr. Kyoungil Cho >
Approximately 1.5 billions of tires are discarded globally every year, and this is identified as one of the major causes of serious environmental pollution. The research team at the Department of Chemistry at KAIST has achieved a breakthrough by selectively converting waste tires into high-purity cyclic alkenes, valuable chemical building blocks used in the production of rubber and nylon fibers. This advance marks a new milestone in chemical recycling technology for waste tires.
The team, led by Professor Soon Hyeok Hong, has developed a dual-catalyst-based reaction system that overcomes the long-standing challenges associated with recycling vulcanized rubber materials.
Tires are composed of complex blends of synthetic and natural rubber, and their physical strength and durability are reinforced with additives such as silica, carbon black, and antioxidants. In particular, cross-linking between rubber chains is formed through the vulcanization process, giving them a structure resistant to heat and pressure, which is one of the main reasons why chemical recycling of waste tires is difficult.
Until now, waste tire recycling has mainly relied on pyrolysis or mechanical recycling methods. The pyrolysis method is a technology that decomposes polymer chains at high temperatures of 350-800°C to convert them into fuel oil, but it clearly has limitations such as high energy consumption, low selectivity, and the production of low-quality hydrocarbon mixtures.
To solve these problems, the research team developed a method to convert waste rubber into useful chemicals using dual catalysis. The first catalyst helps to break down rubber molecules by changing their bonding structure, and the second catalyst creates cyclic compounds through a ring-closing reaction.
This process shows high selectivity of up to 92% and a yield of 82%. The produced cyclopentene can be recycled into rubber, and cyclohexene can be used as a raw material for nylon fibers, making them industrially very valuable.
The research team successfully applied the developed system to discarded waste tires, achieving selective conversion into high-purity cyclic alkenes. Unlike the existing pyrolysis method, this is evaluated as a new turning point in the field of waste tire recycling as it can produce high-value chemicals through low-temperature precision catalytic reactions.
In addition, this catalytic platform is compatible with a wide range of synthetic and waste rubbers, positioning it as a promising foundation for scalable, circular solutions in the polymer and materials industries.
< Figure 1. Development of a Catalytic Method for Chemical Recycling of Waste Rubber >
Professor Hong stated, "This research offers an innovative solution for the chemical recycling of waste tires. We aim to develop next-generation high-efficiency catalysts and lay the groundwork for commercialization to enhance economic feasibility. Ultimately, our goal is to contribute to solving the broader waste plastic problem through fundamental chemistry."
This research, in which Beomsoon Park, Kyoungil Cho, and Kyungmin Choi participated, was supported by the National Research Foundation of Korea and was published online in the internationally renowned academic journal ‘Chem’ on June 18th.
※Paper Title: Catalytic and Selective Chemical Recycling of Post-Consumer Rubbers into Cycloalkenes
※DOI: 10.1016/j.chempr.2025.102625
2025.06.26 View 653
New and Highly Efficient Recycling Technology to Turn Used Tires into Raw Materials for Rubber and Nylon
< (From left) Kyungmin Choi (MS-Ph.D. integrated course, Department of Chemistry), Dr. Beomsoon Park, Professor Soon Hyeok Hong, Dr. Kyoungil Cho >
Approximately 1.5 billions of tires are discarded globally every year, and this is identified as one of the major causes of serious environmental pollution. The research team at the Department of Chemistry at KAIST has achieved a breakthrough by selectively converting waste tires into high-purity cyclic alkenes, valuable chemical building blocks used in the production of rubber and nylon fibers. This advance marks a new milestone in chemical recycling technology for waste tires.
The team, led by Professor Soon Hyeok Hong, has developed a dual-catalyst-based reaction system that overcomes the long-standing challenges associated with recycling vulcanized rubber materials.
Tires are composed of complex blends of synthetic and natural rubber, and their physical strength and durability are reinforced with additives such as silica, carbon black, and antioxidants. In particular, cross-linking between rubber chains is formed through the vulcanization process, giving them a structure resistant to heat and pressure, which is one of the main reasons why chemical recycling of waste tires is difficult.
Until now, waste tire recycling has mainly relied on pyrolysis or mechanical recycling methods. The pyrolysis method is a technology that decomposes polymer chains at high temperatures of 350-800°C to convert them into fuel oil, but it clearly has limitations such as high energy consumption, low selectivity, and the production of low-quality hydrocarbon mixtures.
To solve these problems, the research team developed a method to convert waste rubber into useful chemicals using dual catalysis. The first catalyst helps to break down rubber molecules by changing their bonding structure, and the second catalyst creates cyclic compounds through a ring-closing reaction.
This process shows high selectivity of up to 92% and a yield of 82%. The produced cyclopentene can be recycled into rubber, and cyclohexene can be used as a raw material for nylon fibers, making them industrially very valuable.
The research team successfully applied the developed system to discarded waste tires, achieving selective conversion into high-purity cyclic alkenes. Unlike the existing pyrolysis method, this is evaluated as a new turning point in the field of waste tire recycling as it can produce high-value chemicals through low-temperature precision catalytic reactions.
In addition, this catalytic platform is compatible with a wide range of synthetic and waste rubbers, positioning it as a promising foundation for scalable, circular solutions in the polymer and materials industries.
< Figure 1. Development of a Catalytic Method for Chemical Recycling of Waste Rubber >
Professor Hong stated, "This research offers an innovative solution for the chemical recycling of waste tires. We aim to develop next-generation high-efficiency catalysts and lay the groundwork for commercialization to enhance economic feasibility. Ultimately, our goal is to contribute to solving the broader waste plastic problem through fundamental chemistry."
This research, in which Beomsoon Park, Kyoungil Cho, and Kyungmin Choi participated, was supported by the National Research Foundation of Korea and was published online in the internationally renowned academic journal ‘Chem’ on June 18th.
※Paper Title: Catalytic and Selective Chemical Recycling of Post-Consumer Rubbers into Cycloalkenes
※DOI: 10.1016/j.chempr.2025.102625
2025.06.26 View 653 -
 KAIST to Lead the Way in Nurturing Talent and Driving S&T Innovation for a G3 AI Powerhouse
* Focusing on nurturing talent and dedicating to R&D to become a G3 AI powerhouse (Top 3 AI Nations).
* Leading the realization of an "AI-driven Basic Society for All" and developing technologies that leverage AI to overcome the crisis in Korea's manufacturing sector.
* 50 years ago, South Korea emerged as a scientific and technological powerhouse from the ashes, with KAIST at its core, contributing to the development of scientific and technological talent, innovative technology, national industrial growth, and the creation of a startup innovation ecosystem.
As public interest in AI and science and technology has significantly grown with the inauguration of the new government, KAIST (President Kwang Hyung Lee) announced its plan, on June 24th, to transform into an "AI-centric, Value-Creating Science and Technology University" that leads national innovation based on science and technology and spearheads solutions to global challenges.
At a time when South Korea is undergoing a major transition to a technology-driven society, KAIST, drawing on its half-century of experience as a "Starter Kit" for national development, is preparing to leap beyond being a mere educational and research institution to become a global innovation hub that creates new social value.
In particular, KAIST has presented a vision for realizing an "AI-driven Basic Society" where all citizens can utilize AI without alienation, enabling South Korea to ascend to the top three AI nations (G3). To achieve this, through the "National AI Research Hub" project (headed by Kee Eung Kim), led by KAIST representing South Korea, the institution is dedicated to enhancing industrial competitiveness and effectively solving social problems based on AI technology.
< KAIST President Kwang Hyung Lee >
KAIST's research achievements in the AI field are garnering international attention. In the top three machine learning conferences (ICML, NeurIPS, ICLR), KAIST ranked 5th globally and 1st in Asia over the past five years (2020-2024). During the same period, based on the number of papers published in top conferences in machine learning, natural language processing, and computer vision (ICML, NeurIPS, ICLR, ACL, EMNLP, NAACL, CVPR, ICCV, ECCV), KAIST ranked 5th globally and 4th in Asia. Furthermore, KAIST has consistently demonstrated unparalleled research capabilities, ranking 1st globally in the average number of papers accepted at ISSCC (International Solid-State Circuits Conference), the world's most prestigious academic conference on semiconductor integrated circuits, for 19 years (2006-2024).
KAIST is continuously expanding its research into core AI technologies, including hyper-scale AI models (Korean LLM), neuromorphic semiconductors, and low-power AI processors, as well as various application areas such as autonomous driving, urban air mobility (UAM), precision medicine, and explainable AI (XAI).
In the manufacturing sector, KAIST's AI technologies are also driving on-site innovation. Professor Young Jae Jang's team has enhanced productivity in advanced manufacturing fields like semiconductors and displays through digital twins utilizing manufacturing site data and AI-based prediction technology. Professor Song Min Kim's team developed ultra-low power wireless tag technology capable of tracking locations with sub-centimeter precision, accelerating the implementation of smart factories. Technologies such as industrial process optimization and equipment failure prediction developed by INEEJI Co., Ltd., founded by Professor Jaesik Choi, are being rapidly applied in real industrial settings, yielding results. INEEJI was designated as a national strategic technology in the 'Explainable AI (XAI)' field by the government in March.
< Researchers performing data analysis for AI research >
Practical applications are also emerging in the robotics sector, which is closely linked to AI. Professor Jemin Hwangbo's team from the Department of Mechanical Engineering garnered attention by newly developing RAIBO 2, a quadrupedal robot usable in high-risk environments such as disaster relief and rough terrain exploration. Professor Kyoung Chul Kong's team and Angel Robotics Co., Ltd. developed the WalkOn Suit exoskeleton robot, significantly improving the quality of life for individuals with complete lower body paralysis or walking disabilities.
Additionally, remarkable research is ongoing in future core technology areas such as AI semiconductors, quantum cryptography communication, ultra-small satellites, hydrogen fuel cells, next-generation batteries, and biomimetic sensors. Notably, space exploration technology based on small satellites, asteroid exploration projects, energy harvesting, and high-speed charging technologies are gaining attention.
Particularly in advanced bio and life sciences, KAIST is collaborating with Germany's Merck company on various research initiatives, including synthetic biology and mRNA. KAIST is also contributing to the construction of a 430 billion won Merck Bio-Center in Daejeon, thereby stimulating the local economy and creating jobs.
Based on these cutting-edge research capabilities, KAIST continues to expand its influence not only within the industry but also on the global stage. It has established strategic partnerships with leading universities worldwide, including MIT, Stanford University, and New York University (NYU). Notably, KAIST and NYU have established a joint campus in New York to strengthen human exchange and collaborative research. Active industry-academia collaborations with global companies such as Google, Intel, and TSMC are also ongoing, playing a pivotal role in future technology development and the creation of an innovation ecosystem.
These activities also lead to a strong startup ecosystem that drives South Korean industries. The flow of startups, which began with companies like Qnix Computer, Nexon, and Naver, has expanded to a total of 1,914 companies to date. Their cumulative assets amount to 94 trillion won, with sales reaching 36 trillion won and employing approximately 60,000 people. Over 90% of these are technology-based startups originating from faculty and student labs, demonstrating a model that makes a tangible economic contribution based on science and technology.
< Students at work >
Having consistently generated diverse achievements, KAIST has already produced approximately 80,000 "KAISTians" who have created innovation through challenge and failure, and is currently recruiting new talent to continue driving innovation that transforms South Korea and the world.
President Kwang Hyung Lee emphasized, "KAIST will establish itself as a global leader in science and technology, designing the future of South Korea and humanity and creating tangible value." He added, "We will focus on talent nurturing and research and development to realize the new government's national agenda of becoming a G3 AI powerhouse."
He further stated, "KAIST's vision for the AI field, in which it places particular emphasis, is to strive for a society where everyone can freely utilize AI. We will contribute to significantly boosting productivity by recovering manufacturing competitiveness through AI and actively disseminating physical AI, AI robots, and AI mobility technologies to industrial sites."
2025.06.24 View 637
KAIST to Lead the Way in Nurturing Talent and Driving S&T Innovation for a G3 AI Powerhouse
* Focusing on nurturing talent and dedicating to R&D to become a G3 AI powerhouse (Top 3 AI Nations).
* Leading the realization of an "AI-driven Basic Society for All" and developing technologies that leverage AI to overcome the crisis in Korea's manufacturing sector.
* 50 years ago, South Korea emerged as a scientific and technological powerhouse from the ashes, with KAIST at its core, contributing to the development of scientific and technological talent, innovative technology, national industrial growth, and the creation of a startup innovation ecosystem.
As public interest in AI and science and technology has significantly grown with the inauguration of the new government, KAIST (President Kwang Hyung Lee) announced its plan, on June 24th, to transform into an "AI-centric, Value-Creating Science and Technology University" that leads national innovation based on science and technology and spearheads solutions to global challenges.
At a time when South Korea is undergoing a major transition to a technology-driven society, KAIST, drawing on its half-century of experience as a "Starter Kit" for national development, is preparing to leap beyond being a mere educational and research institution to become a global innovation hub that creates new social value.
In particular, KAIST has presented a vision for realizing an "AI-driven Basic Society" where all citizens can utilize AI without alienation, enabling South Korea to ascend to the top three AI nations (G3). To achieve this, through the "National AI Research Hub" project (headed by Kee Eung Kim), led by KAIST representing South Korea, the institution is dedicated to enhancing industrial competitiveness and effectively solving social problems based on AI technology.
< KAIST President Kwang Hyung Lee >
KAIST's research achievements in the AI field are garnering international attention. In the top three machine learning conferences (ICML, NeurIPS, ICLR), KAIST ranked 5th globally and 1st in Asia over the past five years (2020-2024). During the same period, based on the number of papers published in top conferences in machine learning, natural language processing, and computer vision (ICML, NeurIPS, ICLR, ACL, EMNLP, NAACL, CVPR, ICCV, ECCV), KAIST ranked 5th globally and 4th in Asia. Furthermore, KAIST has consistently demonstrated unparalleled research capabilities, ranking 1st globally in the average number of papers accepted at ISSCC (International Solid-State Circuits Conference), the world's most prestigious academic conference on semiconductor integrated circuits, for 19 years (2006-2024).
KAIST is continuously expanding its research into core AI technologies, including hyper-scale AI models (Korean LLM), neuromorphic semiconductors, and low-power AI processors, as well as various application areas such as autonomous driving, urban air mobility (UAM), precision medicine, and explainable AI (XAI).
In the manufacturing sector, KAIST's AI technologies are also driving on-site innovation. Professor Young Jae Jang's team has enhanced productivity in advanced manufacturing fields like semiconductors and displays through digital twins utilizing manufacturing site data and AI-based prediction technology. Professor Song Min Kim's team developed ultra-low power wireless tag technology capable of tracking locations with sub-centimeter precision, accelerating the implementation of smart factories. Technologies such as industrial process optimization and equipment failure prediction developed by INEEJI Co., Ltd., founded by Professor Jaesik Choi, are being rapidly applied in real industrial settings, yielding results. INEEJI was designated as a national strategic technology in the 'Explainable AI (XAI)' field by the government in March.
< Researchers performing data analysis for AI research >
Practical applications are also emerging in the robotics sector, which is closely linked to AI. Professor Jemin Hwangbo's team from the Department of Mechanical Engineering garnered attention by newly developing RAIBO 2, a quadrupedal robot usable in high-risk environments such as disaster relief and rough terrain exploration. Professor Kyoung Chul Kong's team and Angel Robotics Co., Ltd. developed the WalkOn Suit exoskeleton robot, significantly improving the quality of life for individuals with complete lower body paralysis or walking disabilities.
Additionally, remarkable research is ongoing in future core technology areas such as AI semiconductors, quantum cryptography communication, ultra-small satellites, hydrogen fuel cells, next-generation batteries, and biomimetic sensors. Notably, space exploration technology based on small satellites, asteroid exploration projects, energy harvesting, and high-speed charging technologies are gaining attention.
Particularly in advanced bio and life sciences, KAIST is collaborating with Germany's Merck company on various research initiatives, including synthetic biology and mRNA. KAIST is also contributing to the construction of a 430 billion won Merck Bio-Center in Daejeon, thereby stimulating the local economy and creating jobs.
Based on these cutting-edge research capabilities, KAIST continues to expand its influence not only within the industry but also on the global stage. It has established strategic partnerships with leading universities worldwide, including MIT, Stanford University, and New York University (NYU). Notably, KAIST and NYU have established a joint campus in New York to strengthen human exchange and collaborative research. Active industry-academia collaborations with global companies such as Google, Intel, and TSMC are also ongoing, playing a pivotal role in future technology development and the creation of an innovation ecosystem.
These activities also lead to a strong startup ecosystem that drives South Korean industries. The flow of startups, which began with companies like Qnix Computer, Nexon, and Naver, has expanded to a total of 1,914 companies to date. Their cumulative assets amount to 94 trillion won, with sales reaching 36 trillion won and employing approximately 60,000 people. Over 90% of these are technology-based startups originating from faculty and student labs, demonstrating a model that makes a tangible economic contribution based on science and technology.
< Students at work >
Having consistently generated diverse achievements, KAIST has already produced approximately 80,000 "KAISTians" who have created innovation through challenge and failure, and is currently recruiting new talent to continue driving innovation that transforms South Korea and the world.
President Kwang Hyung Lee emphasized, "KAIST will establish itself as a global leader in science and technology, designing the future of South Korea and humanity and creating tangible value." He added, "We will focus on talent nurturing and research and development to realize the new government's national agenda of becoming a G3 AI powerhouse."
He further stated, "KAIST's vision for the AI field, in which it places particular emphasis, is to strive for a society where everyone can freely utilize AI. We will contribute to significantly boosting productivity by recovering manufacturing competitiveness through AI and actively disseminating physical AI, AI robots, and AI mobility technologies to industrial sites."
2025.06.24 View 637 -
 Distinguished Professor Sang Yup Lee Wins 2025 Global Metabolic Engineering Award
< Distinguished Professor Sang Yup Lee (Senior Vice President for Research) from the Department of Chemical & Biomolecular Engineering >
KAIST announced on the 20th that Professor Sang Yup Lee, who serves as the Vice President for Research and a Distinguished Professor at our university, has been awarded the '2025 Gregory N. Stephanopoulos Award for Metabolic Engineering' by the International Metabolic Engineering Society (IMES). Professor Lee delivered his award lecture at the 16th Metabolic Engineering Conference (ME16), held in Copenhagen, Denmark, from June 15th to 19th.
This award was established through contributions from the American Institute of Chemical Engineers (AIChE) Foundation, as well as fellow colleagues and acquaintances, to honor the achievements of Dr. Gregory Stephanopoulos, widely recognized as one of the pioneers of metabolic engineering. Presented biennially, the award recognizes scientists who have successfully commercialized fundamental research in metabolic engineering or have made outstanding contributions to the quantitative analysis, design, and modeling of metabolic pathways.
Professor Sang Yup Lee boasts an impressive record of over 770 journal papers and more than 860 patents. His groundbreaking research in metabolic engineering and biochemical engineering is highly acclaimed globally.
Throughout his 31 years as a professor at KAIST, Professor Lee has developed various metabolic engineering-based technologies and strategies. These advancements have been transferred to industries, facilitating the production of bulk chemicals, polymers, natural products, pharmaceuticals, and health functional foods. He has also founded companies and actively engages in advisory roles with various enterprises.
The International Metabolic Engineering Society (IMES) defines metabolic engineering as the manipulation of metabolic pathways in microorganisms or cells to produce useful substances (such as pharmaceuticals, biofuels, and chemical products). It utilizes tools like systems biology, synthetic biology, and computational modeling with the aim of enhancing the economic viability and sustainability of bio-based processes.
Furthermore, Professor Lee previously received the Merck Metabolic Engineering Award, a prominent international award in the field, in 2008. In 2018, he was honored with the Eni Award, often referred to as the Nobel Prize in energy, presented by the President of Italy.
Professor Sang Yup Lee remarked, "Metabolic engineering is a discipline that leads the current and future of biotechnology. It is a tremendous honor to receive this meaningful award at a time when the transition to a bio-based economy is accelerating. Together with my students and fellow researchers, we have generated numerous patents and transferred technologies to industry, and also established startups in the fields of biofuels, wound healing, and cosmetics. I will continue to pursue research that encompasses both fundamental research and technological commercialization."
The 'International Metabolic Engineering Society (IMES)' is a specialized society under the American Institute of Chemical Engineers. Its mission is to enable the production of various bio-based products, including pharmaceuticals, food additives, chemicals, and fuels, through metabolic engineering. The society hosts the Metabolic Engineering Conference biennially, offering researchers opportunities for knowledge exchange and collaboration.
2025.06.20 View 761
Distinguished Professor Sang Yup Lee Wins 2025 Global Metabolic Engineering Award
< Distinguished Professor Sang Yup Lee (Senior Vice President for Research) from the Department of Chemical & Biomolecular Engineering >
KAIST announced on the 20th that Professor Sang Yup Lee, who serves as the Vice President for Research and a Distinguished Professor at our university, has been awarded the '2025 Gregory N. Stephanopoulos Award for Metabolic Engineering' by the International Metabolic Engineering Society (IMES). Professor Lee delivered his award lecture at the 16th Metabolic Engineering Conference (ME16), held in Copenhagen, Denmark, from June 15th to 19th.
This award was established through contributions from the American Institute of Chemical Engineers (AIChE) Foundation, as well as fellow colleagues and acquaintances, to honor the achievements of Dr. Gregory Stephanopoulos, widely recognized as one of the pioneers of metabolic engineering. Presented biennially, the award recognizes scientists who have successfully commercialized fundamental research in metabolic engineering or have made outstanding contributions to the quantitative analysis, design, and modeling of metabolic pathways.
Professor Sang Yup Lee boasts an impressive record of over 770 journal papers and more than 860 patents. His groundbreaking research in metabolic engineering and biochemical engineering is highly acclaimed globally.
Throughout his 31 years as a professor at KAIST, Professor Lee has developed various metabolic engineering-based technologies and strategies. These advancements have been transferred to industries, facilitating the production of bulk chemicals, polymers, natural products, pharmaceuticals, and health functional foods. He has also founded companies and actively engages in advisory roles with various enterprises.
The International Metabolic Engineering Society (IMES) defines metabolic engineering as the manipulation of metabolic pathways in microorganisms or cells to produce useful substances (such as pharmaceuticals, biofuels, and chemical products). It utilizes tools like systems biology, synthetic biology, and computational modeling with the aim of enhancing the economic viability and sustainability of bio-based processes.
Furthermore, Professor Lee previously received the Merck Metabolic Engineering Award, a prominent international award in the field, in 2008. In 2018, he was honored with the Eni Award, often referred to as the Nobel Prize in energy, presented by the President of Italy.
Professor Sang Yup Lee remarked, "Metabolic engineering is a discipline that leads the current and future of biotechnology. It is a tremendous honor to receive this meaningful award at a time when the transition to a bio-based economy is accelerating. Together with my students and fellow researchers, we have generated numerous patents and transferred technologies to industry, and also established startups in the fields of biofuels, wound healing, and cosmetics. I will continue to pursue research that encompasses both fundamental research and technological commercialization."
The 'International Metabolic Engineering Society (IMES)' is a specialized society under the American Institute of Chemical Engineers. Its mission is to enable the production of various bio-based products, including pharmaceuticals, food additives, chemicals, and fuels, through metabolic engineering. The society hosts the Metabolic Engineering Conference biennially, offering researchers opportunities for knowledge exchange and collaboration.
2025.06.20 View 761 -
 KAIST Develops Glare-Free, Heat-Blocking 'Smart Window'... Applicable to Buildings and Vehicles
• Professor Hong Chul Moon of the Department of Chemical and Biomolecular Engineering develops RECM, a next-generation smart window technology, expecting cooling energy savings and effective indoor thermal management.
• When using the developed RECM, a significantly superior temperature reduction effect is observed compared to conventional windows.
• With a 'pedestrian-friendly smart window' design that eliminates glare by suppressing external reflections, it is expected to be adapted in architectural structures, transportation, and more.
< (From left) First author Hoy Jung Jo, Professor Hong Chul Moon >
In the building sector, which accounts for approximately 40% of global energy consumption, heat ingress through windows has been identified as a primary cause of wasted heating and cooling energy. Our research team has successfully developed a 'pedestrian-friendly smart window' technology capable of not only reducing heating and cooling energy in urban buildings but also resolving the persistent issue of 'light pollution' in urban living.
On the 17th of June, Professor Hong Chul Moon's research team at KAIST's Department of Chemical and Biomolecular Engineering announced the development of a 'smart window technology' that allows users to control the light and heat entering through windows according to their intent, and effectively neutralize glare from external sources.
Recently, 'active smart window' technology, which enables free adjustment of light and heat based on user operation, has garnered significant attention. Unlike conventional windows that passively react to changes in temperature or light, this is a next-generation window system that can be controlled in real-time via electrical signals.
The next-generation smart window technology developed by the research team, RECM (Reversible Electrodeposition and Electrochromic Mirror), is a smart window system based on a single-structured *electrochromic device that can actively control the transmittance of visible light and near-infrared (heat).
*Electrochromic device: A device whose optical properties change in response to an electrical signal.
In particular, by effectively suppressing the glare phenomenon caused by external reflected light—a problem previously identified in traditional metal *deposition smart windows—through the combined application of electrochromic materials, a 'pedestrian-friendly smart window' suitable for building facades has been realized.
*Deposition: A process involving the electrochemical reaction to coat metal ions, such as Ag+, onto an electrode surface in solid form.
The RECM system developed in this study operates in three modes depending on voltage control.
Mode I (Transparent Mode) is advantageous for allowing sunlight to enter the indoor space during winter, as it transmits both light and heat like ordinary glass.
In Mode II (Colored Mode), *Prussian Blue (PB) and **DHV+• chemical species are formed through a redox (oxidation-reduction) reaction, causing the window to turn a deep blue color. In this state, light is absorbed, and only a portion of the heat is transmitted, allowing for privacy while enabling appropriate indoor temperature control.
*Prussian Blue: An electrochromic material that transitions between colorless and blue upon electrical stimulation.
**DHV+•: A radical state colored molecule generated upon electrical stimulation.
Mode III (Colored and Deposition Mode) involves the reduction and deposition of silver (Ag+) ions on the electrode surface, reflecting both light and heat. Concurrently, the colored material absorbs the reflected light, effectively blocking glare for external pedestrians.
The research team validated the practical indoor temperature reduction effect of the RECM technology through experiments utilizing a miniature model house. When a conventional glass window was installed, the indoor temperature rose to 58.7°C within 45 minutes. Conversely, when RECM was operated in Mode III, the temperature reached 31.5°C, demonstrating a temperature reduction effect of approximately 27.2°C.
Furthermore, since each state transition is achievable solely by electrical signals, it is regarded as an active smart technology capable of instantaneous response according to season, time, and intended use.
< Figure 1. Operation mechanism of the RECM smart window. The RECM system can switch among three states—transparent, colored, and colored & deposition—via electrical stimulation. At -1.6 V, DHV•+ and Prussian Blue (PB) are formed, blocking visible light to provide privacy protection and heat blocking. At -2.0 V, silver (Ag) is deposited on the electrode surface, reflecting light and heat, while DHV•+ and Prussian Blue absorb reflected light, effectively suppressing external glare. Through this mechanism, it functions as an active smart window that simultaneously controls light, heat, and glare. >
Professor Hong Chul Moon of KAIST, the corresponding author of this study, stated, "This research goes beyond existing smart window technologies limited to visible light control, presenting a truly smart window platform that comprehensively considers not only active indoor thermal control but also the visual safety of pedestrians." He added, "Various applications are anticipated, from urban buildings to vehicles and trains."
< Figure 2. Analysis of glare suppression effect of conventional reflective smart windows and RECM. This figure presents the results comparing the glare phenomenon occurring during silver (Ag) deposition between conventional reflective smart windows and RECM Mode III. Conventional reflective devices resulted in strong reflected light on the desk surface due to their high reflectivity. In contrast, RECM Mode III, where the colored material absorbed reflected light, showed a 33% reduction in reflected light intensity, and no reflected light was observed from outside. This highlights the RECM system's distinctiveness and practicality as a 'pedestrian-friendly smart window' optimized for dense urban environments, extending beyond just heat blocking. >
The findings of this research were published on June 13, 2025, in Volume 10, Issue 6 of 'ACS Energy Letters'. The listed authors for this publication are Hoy Jung Jo, Yeon Jae Jang, Hyeon-Don Kim, Kwang-Seop Kim, and Hong Chul Moon.
※ Paper Title: Glare-Free, Energy-Efficient Smart Windows: A Pedestrian-Friendly System with Dynamically Tunable Light and Heat Regulation
※ DOI: 10.1021/acsenergylett.5c00637
< Figure 3. Temperature reduction performance verification in a miniature model house. The actual heat blocking effect was evaluated by applying RECM devices to a model building. Under identical conditions, the indoor temperature with ordinary glass rose to 58.7°C, whereas with RECM in Mode III, it reached 31.5°C, demonstrating a maximum temperature reduction effect of 27.2°C. The indoor temperature difference was also visually confirmed through thermal images, which proves the potential for indoor temperature control in urban buildings. >
This research was supported by the Nano & Material Technology Development Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT and the internal research program of the Korea Institute of Machinery and Materials.
2025.06.20 View 2134
KAIST Develops Glare-Free, Heat-Blocking 'Smart Window'... Applicable to Buildings and Vehicles
• Professor Hong Chul Moon of the Department of Chemical and Biomolecular Engineering develops RECM, a next-generation smart window technology, expecting cooling energy savings and effective indoor thermal management.
• When using the developed RECM, a significantly superior temperature reduction effect is observed compared to conventional windows.
• With a 'pedestrian-friendly smart window' design that eliminates glare by suppressing external reflections, it is expected to be adapted in architectural structures, transportation, and more.
< (From left) First author Hoy Jung Jo, Professor Hong Chul Moon >
In the building sector, which accounts for approximately 40% of global energy consumption, heat ingress through windows has been identified as a primary cause of wasted heating and cooling energy. Our research team has successfully developed a 'pedestrian-friendly smart window' technology capable of not only reducing heating and cooling energy in urban buildings but also resolving the persistent issue of 'light pollution' in urban living.
On the 17th of June, Professor Hong Chul Moon's research team at KAIST's Department of Chemical and Biomolecular Engineering announced the development of a 'smart window technology' that allows users to control the light and heat entering through windows according to their intent, and effectively neutralize glare from external sources.
Recently, 'active smart window' technology, which enables free adjustment of light and heat based on user operation, has garnered significant attention. Unlike conventional windows that passively react to changes in temperature or light, this is a next-generation window system that can be controlled in real-time via electrical signals.
The next-generation smart window technology developed by the research team, RECM (Reversible Electrodeposition and Electrochromic Mirror), is a smart window system based on a single-structured *electrochromic device that can actively control the transmittance of visible light and near-infrared (heat).
*Electrochromic device: A device whose optical properties change in response to an electrical signal.
In particular, by effectively suppressing the glare phenomenon caused by external reflected light—a problem previously identified in traditional metal *deposition smart windows—through the combined application of electrochromic materials, a 'pedestrian-friendly smart window' suitable for building facades has been realized.
*Deposition: A process involving the electrochemical reaction to coat metal ions, such as Ag+, onto an electrode surface in solid form.
The RECM system developed in this study operates in three modes depending on voltage control.
Mode I (Transparent Mode) is advantageous for allowing sunlight to enter the indoor space during winter, as it transmits both light and heat like ordinary glass.
In Mode II (Colored Mode), *Prussian Blue (PB) and **DHV+• chemical species are formed through a redox (oxidation-reduction) reaction, causing the window to turn a deep blue color. In this state, light is absorbed, and only a portion of the heat is transmitted, allowing for privacy while enabling appropriate indoor temperature control.
*Prussian Blue: An electrochromic material that transitions between colorless and blue upon electrical stimulation.
**DHV+•: A radical state colored molecule generated upon electrical stimulation.
Mode III (Colored and Deposition Mode) involves the reduction and deposition of silver (Ag+) ions on the electrode surface, reflecting both light and heat. Concurrently, the colored material absorbs the reflected light, effectively blocking glare for external pedestrians.
The research team validated the practical indoor temperature reduction effect of the RECM technology through experiments utilizing a miniature model house. When a conventional glass window was installed, the indoor temperature rose to 58.7°C within 45 minutes. Conversely, when RECM was operated in Mode III, the temperature reached 31.5°C, demonstrating a temperature reduction effect of approximately 27.2°C.
Furthermore, since each state transition is achievable solely by electrical signals, it is regarded as an active smart technology capable of instantaneous response according to season, time, and intended use.
< Figure 1. Operation mechanism of the RECM smart window. The RECM system can switch among three states—transparent, colored, and colored & deposition—via electrical stimulation. At -1.6 V, DHV•+ and Prussian Blue (PB) are formed, blocking visible light to provide privacy protection and heat blocking. At -2.0 V, silver (Ag) is deposited on the electrode surface, reflecting light and heat, while DHV•+ and Prussian Blue absorb reflected light, effectively suppressing external glare. Through this mechanism, it functions as an active smart window that simultaneously controls light, heat, and glare. >
Professor Hong Chul Moon of KAIST, the corresponding author of this study, stated, "This research goes beyond existing smart window technologies limited to visible light control, presenting a truly smart window platform that comprehensively considers not only active indoor thermal control but also the visual safety of pedestrians." He added, "Various applications are anticipated, from urban buildings to vehicles and trains."
< Figure 2. Analysis of glare suppression effect of conventional reflective smart windows and RECM. This figure presents the results comparing the glare phenomenon occurring during silver (Ag) deposition between conventional reflective smart windows and RECM Mode III. Conventional reflective devices resulted in strong reflected light on the desk surface due to their high reflectivity. In contrast, RECM Mode III, where the colored material absorbed reflected light, showed a 33% reduction in reflected light intensity, and no reflected light was observed from outside. This highlights the RECM system's distinctiveness and practicality as a 'pedestrian-friendly smart window' optimized for dense urban environments, extending beyond just heat blocking. >
The findings of this research were published on June 13, 2025, in Volume 10, Issue 6 of 'ACS Energy Letters'. The listed authors for this publication are Hoy Jung Jo, Yeon Jae Jang, Hyeon-Don Kim, Kwang-Seop Kim, and Hong Chul Moon.
※ Paper Title: Glare-Free, Energy-Efficient Smart Windows: A Pedestrian-Friendly System with Dynamically Tunable Light and Heat Regulation
※ DOI: 10.1021/acsenergylett.5c00637
< Figure 3. Temperature reduction performance verification in a miniature model house. The actual heat blocking effect was evaluated by applying RECM devices to a model building. Under identical conditions, the indoor temperature with ordinary glass rose to 58.7°C, whereas with RECM in Mode III, it reached 31.5°C, demonstrating a maximum temperature reduction effect of 27.2°C. The indoor temperature difference was also visually confirmed through thermal images, which proves the potential for indoor temperature control in urban buildings. >
This research was supported by the Nano & Material Technology Development Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT and the internal research program of the Korea Institute of Machinery and Materials.
2025.06.20 View 2134 -
 Simultaneous Analysis of 21 Chemical Reactions... AI to Transform New Drug Development
< Photo 1. (From left) Professor Hyunwoo Kim and students Donghun Kim and Gyeongseon Choi in the Integrated M.S./Ph.D. program of the Department of Chemistry >
Thalidomide, a drug once used to alleviate morning sickness in pregnant women, exhibits distinct properties due to its optical isomers* in the body: one isomer has a sedative effect, while the other causes severe side effects like birth defects. As this example illustrates, precise organic synthesis techniques, which selectively synthesize only the desired optical isomer, are crucial in new drug development. Overcoming the traditional methods that struggled with simultaneously analyzing multiple reactants, our research team has developed the world's first technology to precisely analyze 21 types of reactants simultaneously. This breakthrough is expected to make a significant contribution to new drug development utilizing AI and robots.
*Optical Isomers: A pair of molecules with the same chemical formula that are mirror images of each other and cannot be superimposed due to their asymmetric structure. This is analogous to a left and right hand, which are similar in form but cannot be perfectly overlaid.
KAIST's Professor Hyunwoo Kim's research team in the Department of Chemistry announced on the 16th that they have developed an innovative optical isomer analysis technology suitable for the era of AI-driven autonomous synthesis*. This research is the world's first technology to precisely analyze asymmetric catalytic reactions involving multiple reactants simultaneously using high-resolution fluorine nuclear magnetic resonance spectroscopy (19F NMR). It is expected to make groundbreaking contributions to various fields, including new drug development and catalyst optimization.
*AI-driven Autonomous Synthesis: An advanced technology that automates and optimizes chemical substance synthesis processes using artificial intelligence (AI). It is gaining attention as a core element for realizing automated and intelligent research environments in future laboratories. AI predicts and adjusts experimental conditions, interprets results, and designs subsequent experiments independently, minimizing human intervention in repetitive experiments and significantly increasing research efficiency and innovativeness.
Currently, while autonomous synthesis systems can automate everything from reaction design to execution, reaction analysis still relies on individual processing using traditional equipment. This leads to slower speeds and bottlenecks, making it unsuitable for high-speed repetitive experiments.
Furthermore, multi-substrate simultaneous screening techniques proposed in the 1990s garnered attention as a strategy to maximize reaction analysis efficiency. However, limitations of existing chromatography-based analysis methods restricted the number of applicable substrates. In asymmetric synthesis reactions, which selectively synthesize only the desired optical isomer, simultaneously analyzing more than 10 types of substrates was nearly impossible.
< Figure 1. Conventional organic reaction evaluation methods follow a process of deriving optimal reaction conditions using a single substrate, then expanding the substrate scope one by one under those conditions, leaving potential reaction areas unexplored. To overcome this, high-throughput screening is introduced to broadly explore catalyst reactivity for various substrates. When combined with multi-substrate screening, this approach allows for a much broader and more systematic understanding of reaction scope and trends. >
To overcome these limitations, the research team developed a 19F NMR-based multi-substrate simultaneous screening technology. This method involves performing asymmetric catalytic reactions with multiple reactants in a single reaction vessel, introducing a fluorine functional group into the products, and then applying their self-developed chiral cobalt reagent to clearly quantify all optical isomers using 19F NMR.
Utilizing the excellent resolution and sensitivity of 19F NMR, the research team successfully performed asymmetric synthesis reactions of 21 substrates simultaneously in a single reaction vessel and quantitatively measured the product yield and optical isomer ratio without any separate purification steps.
Professor Hyunwoo Kim stated, "While anyone can perform asymmetric synthesis reactions with multiple substrates in one reactor, accurately analyzing all the products has been a challenging problem to solve until now. We expect that achieving world-class multi-substrate screening analysis technology will greatly contribute to enhancing the analytical capabilities of AI-driven autonomous synthesis platforms."
< Figure 2. A method for analyzing multi-substrate asymmetric catalytic reactions, where different substrates react simultaneously in a single reactor, using fluorine nuclear magnetic resonance has been implemented. By utilizing the characteristics of fluorine nuclear magnetic resonance, which has a clean background signal and a wide chemical shift range, the reactivity of each substrate can be quantitatively analyzed. It is also shown that the optical activity of all reactants can be simultaneously measured using a cobalt metal complex. >
He further added, "This research provides a technology that can rapidly verify the efficiency and selectivity of asymmetric catalytic reactions essential for new drug development, and it is expected to be utilized as a core analytical tool for AI-driven autonomous research."
< Figure 3. It can be seen that in a multi-substrate reductive amination reaction using a total of 21 substrates, the yield and optical activity of the reactants according to the catalyst system were simultaneously measured using a fluorine nuclear magnetic resonance-based analysis platform. The yield of each reactant is indicated by color saturation, and the optical activity by numbers. >
Donghun Kim (first author, Integrated M.S./Ph.D. program) and Gyeongseon Choi (second author, Integrated M.S./Ph.D. program) from the KAIST Department of Chemistry participated in this research. The study was published online in the Journal of the American Chemical Society on May 27, 2025.※ Paper Title: One-pot Multisubstrate Screening for Asymmetric Catalysis Enabled by 19F NMR-based Simultaneous Chiral Analysis※ DOI: 10.1021/jacs.5c03446
This research was supported by the National Research Foundation of Korea's Mid-Career Researcher Program, the Asymmetric Catalytic Reaction Design Center, and the KAIST KC30 Project.
< Figure 4. Conceptual diagram of performing multi-substrate screening reactions and utilizing fluorine nuclear magnetic resonance spectroscopy. >
2025.06.16 View 1206
Simultaneous Analysis of 21 Chemical Reactions... AI to Transform New Drug Development
< Photo 1. (From left) Professor Hyunwoo Kim and students Donghun Kim and Gyeongseon Choi in the Integrated M.S./Ph.D. program of the Department of Chemistry >
Thalidomide, a drug once used to alleviate morning sickness in pregnant women, exhibits distinct properties due to its optical isomers* in the body: one isomer has a sedative effect, while the other causes severe side effects like birth defects. As this example illustrates, precise organic synthesis techniques, which selectively synthesize only the desired optical isomer, are crucial in new drug development. Overcoming the traditional methods that struggled with simultaneously analyzing multiple reactants, our research team has developed the world's first technology to precisely analyze 21 types of reactants simultaneously. This breakthrough is expected to make a significant contribution to new drug development utilizing AI and robots.
*Optical Isomers: A pair of molecules with the same chemical formula that are mirror images of each other and cannot be superimposed due to their asymmetric structure. This is analogous to a left and right hand, which are similar in form but cannot be perfectly overlaid.
KAIST's Professor Hyunwoo Kim's research team in the Department of Chemistry announced on the 16th that they have developed an innovative optical isomer analysis technology suitable for the era of AI-driven autonomous synthesis*. This research is the world's first technology to precisely analyze asymmetric catalytic reactions involving multiple reactants simultaneously using high-resolution fluorine nuclear magnetic resonance spectroscopy (19F NMR). It is expected to make groundbreaking contributions to various fields, including new drug development and catalyst optimization.
*AI-driven Autonomous Synthesis: An advanced technology that automates and optimizes chemical substance synthesis processes using artificial intelligence (AI). It is gaining attention as a core element for realizing automated and intelligent research environments in future laboratories. AI predicts and adjusts experimental conditions, interprets results, and designs subsequent experiments independently, minimizing human intervention in repetitive experiments and significantly increasing research efficiency and innovativeness.
Currently, while autonomous synthesis systems can automate everything from reaction design to execution, reaction analysis still relies on individual processing using traditional equipment. This leads to slower speeds and bottlenecks, making it unsuitable for high-speed repetitive experiments.
Furthermore, multi-substrate simultaneous screening techniques proposed in the 1990s garnered attention as a strategy to maximize reaction analysis efficiency. However, limitations of existing chromatography-based analysis methods restricted the number of applicable substrates. In asymmetric synthesis reactions, which selectively synthesize only the desired optical isomer, simultaneously analyzing more than 10 types of substrates was nearly impossible.
< Figure 1. Conventional organic reaction evaluation methods follow a process of deriving optimal reaction conditions using a single substrate, then expanding the substrate scope one by one under those conditions, leaving potential reaction areas unexplored. To overcome this, high-throughput screening is introduced to broadly explore catalyst reactivity for various substrates. When combined with multi-substrate screening, this approach allows for a much broader and more systematic understanding of reaction scope and trends. >
To overcome these limitations, the research team developed a 19F NMR-based multi-substrate simultaneous screening technology. This method involves performing asymmetric catalytic reactions with multiple reactants in a single reaction vessel, introducing a fluorine functional group into the products, and then applying their self-developed chiral cobalt reagent to clearly quantify all optical isomers using 19F NMR.
Utilizing the excellent resolution and sensitivity of 19F NMR, the research team successfully performed asymmetric synthesis reactions of 21 substrates simultaneously in a single reaction vessel and quantitatively measured the product yield and optical isomer ratio without any separate purification steps.
Professor Hyunwoo Kim stated, "While anyone can perform asymmetric synthesis reactions with multiple substrates in one reactor, accurately analyzing all the products has been a challenging problem to solve until now. We expect that achieving world-class multi-substrate screening analysis technology will greatly contribute to enhancing the analytical capabilities of AI-driven autonomous synthesis platforms."
< Figure 2. A method for analyzing multi-substrate asymmetric catalytic reactions, where different substrates react simultaneously in a single reactor, using fluorine nuclear magnetic resonance has been implemented. By utilizing the characteristics of fluorine nuclear magnetic resonance, which has a clean background signal and a wide chemical shift range, the reactivity of each substrate can be quantitatively analyzed. It is also shown that the optical activity of all reactants can be simultaneously measured using a cobalt metal complex. >
He further added, "This research provides a technology that can rapidly verify the efficiency and selectivity of asymmetric catalytic reactions essential for new drug development, and it is expected to be utilized as a core analytical tool for AI-driven autonomous research."
< Figure 3. It can be seen that in a multi-substrate reductive amination reaction using a total of 21 substrates, the yield and optical activity of the reactants according to the catalyst system were simultaneously measured using a fluorine nuclear magnetic resonance-based analysis platform. The yield of each reactant is indicated by color saturation, and the optical activity by numbers. >
Donghun Kim (first author, Integrated M.S./Ph.D. program) and Gyeongseon Choi (second author, Integrated M.S./Ph.D. program) from the KAIST Department of Chemistry participated in this research. The study was published online in the Journal of the American Chemical Society on May 27, 2025.※ Paper Title: One-pot Multisubstrate Screening for Asymmetric Catalysis Enabled by 19F NMR-based Simultaneous Chiral Analysis※ DOI: 10.1021/jacs.5c03446
This research was supported by the National Research Foundation of Korea's Mid-Career Researcher Program, the Asymmetric Catalytic Reaction Design Center, and the KAIST KC30 Project.
< Figure 4. Conceptual diagram of performing multi-substrate screening reactions and utilizing fluorine nuclear magnetic resonance spectroscopy. >
2025.06.16 View 1206 -
 KAIST Holds a Ceremony to Declare their Renewed Commitment for Ethical Management
KAIST held a ceremony to declare their renewed "Commitment for Ethical Management" to raise awareness and solidify the commitment its members to faithfully fulfill ethical responsibilities and duties.
Last March, the university established the 'Special Committee for Ethical Management,' chaired by the Provost, and under the leadership of this committee, a new 'Code of Ethics' and 'Code of Conduct' were prepared, containing ethical standards that members must adhere to across all areas of education, research, and administration.
< Photo 1. Attendees pledge to practice ethics during the declaration for the ethical management. >
This ceremony was arranged as an occasion for the president, key executives, and representatives from each university constituent to share the purpose and direction of the newly established ethical standards and to pledge their commitment to practicing them.
The Ethical Management Declaration consisted of: ▲ a progress report by the KAIST Special Committee for Ethical Management, ▲ a commemorative address by the president, ▲ an oath of the Code of Ethics and Code of Conduct, and ▲ the presentation of the 'Excellent Ethics Professor Award' organized by the Graduate Student Human Rights Center. Attendees shared the values and meaning of ethical management pursued by KAIST.
Particularly at this ceremony, six representatives – faculty, staff, and students – selected to reflect KAIST's values encompassing diversity in position, role, gender, and future generations, took the oath for the Code of Ethics and Code of Conduct.
< Photo 2. Attendees pledge to practice ethics during the Ethical Management Declaration. >
Also introduced at the ceremony was the "Ethical Excellence Award for Professors". It is an award that was organized by the Graduate Student Human Rights Center under the KAIST Student Council to recognize the faculty members for their outstanding ethical conduct in the laboratory setting. The 2025 recipients of the newly established award were the honored at the declaration ceremony for added significance.
Taking this declaration ceremony as an example, KAIST plans to actively encourage each departments, divisions and offices to also hold ethical management declarations of their own to establish a trustworthy, healthy, and transparent organizational culture through the daily practice of ethical responsibilities, and to continuously spread the practice of ethical management among all members.
President Kwang Hyung Lee emphasized, "Adhering to research and social ethics must be the foundation for KAIST to become a university trusted globally," and expressed, "I hope this ceremony serves as a turning point for all members to more faithfully practice their ethical responsibilities and duties."
2025.06.16 View 672
KAIST Holds a Ceremony to Declare their Renewed Commitment for Ethical Management
KAIST held a ceremony to declare their renewed "Commitment for Ethical Management" to raise awareness and solidify the commitment its members to faithfully fulfill ethical responsibilities and duties.
Last March, the university established the 'Special Committee for Ethical Management,' chaired by the Provost, and under the leadership of this committee, a new 'Code of Ethics' and 'Code of Conduct' were prepared, containing ethical standards that members must adhere to across all areas of education, research, and administration.
< Photo 1. Attendees pledge to practice ethics during the declaration for the ethical management. >
This ceremony was arranged as an occasion for the president, key executives, and representatives from each university constituent to share the purpose and direction of the newly established ethical standards and to pledge their commitment to practicing them.
The Ethical Management Declaration consisted of: ▲ a progress report by the KAIST Special Committee for Ethical Management, ▲ a commemorative address by the president, ▲ an oath of the Code of Ethics and Code of Conduct, and ▲ the presentation of the 'Excellent Ethics Professor Award' organized by the Graduate Student Human Rights Center. Attendees shared the values and meaning of ethical management pursued by KAIST.
Particularly at this ceremony, six representatives – faculty, staff, and students – selected to reflect KAIST's values encompassing diversity in position, role, gender, and future generations, took the oath for the Code of Ethics and Code of Conduct.
< Photo 2. Attendees pledge to practice ethics during the Ethical Management Declaration. >
Also introduced at the ceremony was the "Ethical Excellence Award for Professors". It is an award that was organized by the Graduate Student Human Rights Center under the KAIST Student Council to recognize the faculty members for their outstanding ethical conduct in the laboratory setting. The 2025 recipients of the newly established award were the honored at the declaration ceremony for added significance.
Taking this declaration ceremony as an example, KAIST plans to actively encourage each departments, divisions and offices to also hold ethical management declarations of their own to establish a trustworthy, healthy, and transparent organizational culture through the daily practice of ethical responsibilities, and to continuously spread the practice of ethical management among all members.
President Kwang Hyung Lee emphasized, "Adhering to research and social ethics must be the foundation for KAIST to become a university trusted globally," and expressed, "I hope this ceremony serves as a turning point for all members to more faithfully practice their ethical responsibilities and duties."
2025.06.16 View 672 -
 “One Experiment Is All It Takes”: KAIST Team Revolutionizes Drug Interaction Testing, Replacing 60,000 Studies
A groundbreaking new method developed by researchers at KAIST and Chungnam National University could drastically streamline drug interaction testing — replacing dozens of traditional experiments with just one.
The research, led by Professor Jae Kyoung Kim of KAIST Department of Mathematical Sciences & IBS Biomedical Mathematics Group and Professor Sang Kyum Kim of Chungnam National University's College of Pharmacy, introduces a novel analysis technique called 50-BOA, published in Nature Communications on June 5, 2025.
< Photo 1. (From left) Professor Sang Kyum Kim (Chungnam National University College of Pharmacy, co-corresponding author), Dr. Yun Min Song (IBS Biomedical Mathematics Group, formerly KAIST Department of Mathematical Sciences, co-first author), undergraduate student Hyeong Jun Jang (KAIST, co-first author), Professor Jae Kyoung Kim (KAIST and IBS Biomedical Mathematics Group, co-corresponding author) (Top left in the bubble) Professor Hwi-yeol Yun (Chungnam National University College of Pharmacy, co-author) >
For decades, scientists have had to repeat drug inhibition experiments across a wide range of concentrations to estimate inhibition constants — a process seen in over 60,000 scientific publications. But the KAIST-led team discovered that a single, well-chosen inhibitor concentration can yield even more accurate results.
< Figure 1. Graphical summary of 50-BOA. 50-BOA improves the accuracy and efficiency of inhibition constant estimation by using only a single inhibitor concentration instead of the traditionally used method of employing multiple inhibitor concentrations. >
“This approach challenges long-standing assumptions in experimental pharmacology,” says Prof. Kim. “It shows how mathematics can fundamentally redesign life science experiments.”
By mathematically analyzing the sources of error in conventional methods, the team found that over half the data typically collected adds no value or even skews results. Their new method not only cuts experimental effort by over 75%, but also enhances reproducibility and accuracy.
To help researchers adopt the method quickly, the team developed a user-friendly tool that takes simple Excel files as input, now freely available on GitHub:
☞ https://github.com/Mathbiomed/50-BOA
< Figure 2. The MATLAB and R package of 50-BOA at GitHub >
The work holds promise for faster and more reliable drug development, especially in assessing potential interactions in combination therapies. The U.S. FDA already emphasizes the importance of accurate enzyme inhibition assessment during early-stage drug evaluation — and this method could soon become a new gold standard.
2025.06.16 View 1395
“One Experiment Is All It Takes”: KAIST Team Revolutionizes Drug Interaction Testing, Replacing 60,000 Studies
A groundbreaking new method developed by researchers at KAIST and Chungnam National University could drastically streamline drug interaction testing — replacing dozens of traditional experiments with just one.
The research, led by Professor Jae Kyoung Kim of KAIST Department of Mathematical Sciences & IBS Biomedical Mathematics Group and Professor Sang Kyum Kim of Chungnam National University's College of Pharmacy, introduces a novel analysis technique called 50-BOA, published in Nature Communications on June 5, 2025.
< Photo 1. (From left) Professor Sang Kyum Kim (Chungnam National University College of Pharmacy, co-corresponding author), Dr. Yun Min Song (IBS Biomedical Mathematics Group, formerly KAIST Department of Mathematical Sciences, co-first author), undergraduate student Hyeong Jun Jang (KAIST, co-first author), Professor Jae Kyoung Kim (KAIST and IBS Biomedical Mathematics Group, co-corresponding author) (Top left in the bubble) Professor Hwi-yeol Yun (Chungnam National University College of Pharmacy, co-author) >
For decades, scientists have had to repeat drug inhibition experiments across a wide range of concentrations to estimate inhibition constants — a process seen in over 60,000 scientific publications. But the KAIST-led team discovered that a single, well-chosen inhibitor concentration can yield even more accurate results.
< Figure 1. Graphical summary of 50-BOA. 50-BOA improves the accuracy and efficiency of inhibition constant estimation by using only a single inhibitor concentration instead of the traditionally used method of employing multiple inhibitor concentrations. >
“This approach challenges long-standing assumptions in experimental pharmacology,” says Prof. Kim. “It shows how mathematics can fundamentally redesign life science experiments.”
By mathematically analyzing the sources of error in conventional methods, the team found that over half the data typically collected adds no value or even skews results. Their new method not only cuts experimental effort by over 75%, but also enhances reproducibility and accuracy.
To help researchers adopt the method quickly, the team developed a user-friendly tool that takes simple Excel files as input, now freely available on GitHub:
☞ https://github.com/Mathbiomed/50-BOA
< Figure 2. The MATLAB and R package of 50-BOA at GitHub >
The work holds promise for faster and more reliable drug development, especially in assessing potential interactions in combination therapies. The U.S. FDA already emphasizes the importance of accurate enzyme inhibition assessment during early-stage drug evaluation — and this method could soon become a new gold standard.
2025.06.16 View 1395 -
 KAIST Predicts Diseases by Early Detection of Aging Signals in Liver Tissue
- KAIST-KRIBB Develops ‘FiNi-seq’ Technology to Capture Characteristics of Fibrotic Microenvironments Accumulated in Liver Tissue and Dynamic Changes of Early Aging Cells
- Elucidation of the Spatial Ecosystem of Aged Liver Tissue, where Reprogramming of Senescent Cells and Immune Exhaustion Progresses, at the Single-Cell Genome and Epigenome Levels
< (From left) Professor Jong-Eun Park of KAIST Graduate School of Medical Science and Engineering (GSMSE), Dr. Chuna Kim of KRIBB, Dr. Kwon Yong Tak of KAIST GSMSE, Ph.D. Candidate Juyeon Kim of KRIBB, Ph.D. Candidate Myungsun Park of KAIST GSMSE >
Aging and chronic diseases involve the gradual accumulation of subtle tissue changes over a long period. Therefore, there are still limitations in quantitatively understanding these changes within organs and linking them to early signs of disease onset. In response, Korean researchers have successfully developed a platform technology that accurately captures localized changes that first occur within tissue, significantly aiding in faster disease discovery and prediction, and in setting personalized treatment targets.
KAIST (President Kwang Hyung Lee) announced on June 12th that a joint research team led by Professor Jong-Eun Park of the Graduate School of Medical Science and Engineering at KAIST and Dr. Chuna Kim of the Aging Convergence Research Center at the Korea Research Institute of Bioscience and Biotechnology (KRIBB, President Seok-Yoon Kwon) has developed ‘FiNi-seq (Fibrotic Niche enrichment sequencing)’ technology. This technology captures fibrotic microenvironments locally occurring in aged liver tissue and enables precise analysis at the single-cell transcriptome level*.
*Single-cell transcriptome analysis: A method to measure how actively each cell uses which genes, allowing identification and function of individual diseased cells.
The researchers developed a method to selectively enrich early aging microenvironments where regeneration is delayed and fibrosis accumulates, by physically selecting regions with high tissue degradation resistance in aged liver tissue.
In this process, high-resolution identification of fibrosis-related endothelial cells, fibroblasts interacting with the immune system, and immune-exhausted cells such as PD-1 highly expressing CD8 T cells, which were difficult to capture with existing single-cell analysis technologies, was possible.
In particular, the research team confirmed through ‘FiNi-seq’ technology that specific cells observed in fibrotic areas within aged liver tissue secondarily age the surrounding environment through secreted factors, and that this leads to the expansion of the aged environment.
Furthermore, they also elucidated the mechanism by which endothelial cells lose their tissue-specific identity and induce innate immune responses, promoting immune cell infiltration. Through spatial transcriptome analysis, the spatial distribution of fibroblasts interacting with immune cells was quantified, revealing their involvement in tissue regeneration, induction of inflammatory responses, and progression to chronic fibrosis.
The research team performed integrated analysis of multi-omics\* data to obtain transcriptome and epigenome information, precisely interpreting the microenvironment of aged liver tissue and its spatial heterogeneity, and confirming how these changes are connected to the intrahepatic vascular structure.
*Multi-omics: An integrated analysis method for various biological information within an organism, such as genes, proteins, metabolites, and cell information.
The newly developed ‘FiNi-seq’ technology is expected to be a useful platform for high-resolution capture of pathophysiological signals in most chronic liver diseases, including the aging process that causes fibrosis.
< Figure 1. Isolation of fibrotic regions from aged liver tissue, followed by single-cell transcriptome analysis and validation in a fibrosis model. >
The first author, Dr. Kwon Yong Tak of KAIST Graduate School of Medical Science and Engineering (GSMSE), a hepatologist at Seoul St. Mary's Hospital, designed this study to lay the groundwork for early diagnosis and treatment of fibrosis progression, the most important clinical prognostic indicator in chronic liver disease, while pursuing his Ph.D. at KAIST KAIST GSMSE with support from the physician-scientist training program. Co-first author Myungsun Park, a Ph.D. candidate at KAIST KAIST GSMSE, was responsible for the technical implementation of FiNi-seq technology, and Juyeon Kim, a Ph.D. candidate at KRIBB's Aging Convergence Research Center, was responsible for imaging analysis of aged tissue, playing a key role in the research.
Dr. Chuna Kim of KRIBB stated, “Through this study, we were able to precisely elucidate the cellular composition and spatial characteristics of the fibrotic microenvironment observed in aged liver tissue at the single-cell level.”
< Figure 2. Spatially defined stepwise progression patterns of aging-related regions within the liver and identification of regulatory factors inducing them. >
Professor Jong-Eun Park of the Graduate School of Medical Science and Engineering said, “As an analytical technology that can capture subtle changes occurring in the early stages of aging and chronic diseases, it is expected to play a significant role in finding effective treatment targets in the future. Also, we plan to expand this research to chronic diseases in other organs such as the lungs and kidneys, as well as various liver disease models.”
This research was published in the international journal ‘Nature Aging’ on May 5, 2025, with Dr. Kwon Yong Tak of KAIST KAIST GSMSE, Ph.D. Candidate Juyeon Kim of KRIBB, and Ph.D. Candidate Myungsun Park of KAIST as co-first authors.
*Paper Title: Quasi-spatial single-cell transcriptome based on physical tissue properties defines early aging associated niche in liver
*DOI: https://doi.org/10.1038/s43587-025-00857-7
This research was supported by several domestic institutions, including the National Research Foundation of Korea, the Korea Health Industry Development Institute (KHIDI), the Korea Research Institute of Bioscience and Biotechnology (KRIBB), KIST, POSCO Science Fellowship, and the Convergence Medical Scientist Training Program.
2025.06.12 View 1116
KAIST Predicts Diseases by Early Detection of Aging Signals in Liver Tissue
- KAIST-KRIBB Develops ‘FiNi-seq’ Technology to Capture Characteristics of Fibrotic Microenvironments Accumulated in Liver Tissue and Dynamic Changes of Early Aging Cells
- Elucidation of the Spatial Ecosystem of Aged Liver Tissue, where Reprogramming of Senescent Cells and Immune Exhaustion Progresses, at the Single-Cell Genome and Epigenome Levels
< (From left) Professor Jong-Eun Park of KAIST Graduate School of Medical Science and Engineering (GSMSE), Dr. Chuna Kim of KRIBB, Dr. Kwon Yong Tak of KAIST GSMSE, Ph.D. Candidate Juyeon Kim of KRIBB, Ph.D. Candidate Myungsun Park of KAIST GSMSE >
Aging and chronic diseases involve the gradual accumulation of subtle tissue changes over a long period. Therefore, there are still limitations in quantitatively understanding these changes within organs and linking them to early signs of disease onset. In response, Korean researchers have successfully developed a platform technology that accurately captures localized changes that first occur within tissue, significantly aiding in faster disease discovery and prediction, and in setting personalized treatment targets.
KAIST (President Kwang Hyung Lee) announced on June 12th that a joint research team led by Professor Jong-Eun Park of the Graduate School of Medical Science and Engineering at KAIST and Dr. Chuna Kim of the Aging Convergence Research Center at the Korea Research Institute of Bioscience and Biotechnology (KRIBB, President Seok-Yoon Kwon) has developed ‘FiNi-seq (Fibrotic Niche enrichment sequencing)’ technology. This technology captures fibrotic microenvironments locally occurring in aged liver tissue and enables precise analysis at the single-cell transcriptome level*.
*Single-cell transcriptome analysis: A method to measure how actively each cell uses which genes, allowing identification and function of individual diseased cells.
The researchers developed a method to selectively enrich early aging microenvironments where regeneration is delayed and fibrosis accumulates, by physically selecting regions with high tissue degradation resistance in aged liver tissue.
In this process, high-resolution identification of fibrosis-related endothelial cells, fibroblasts interacting with the immune system, and immune-exhausted cells such as PD-1 highly expressing CD8 T cells, which were difficult to capture with existing single-cell analysis technologies, was possible.
In particular, the research team confirmed through ‘FiNi-seq’ technology that specific cells observed in fibrotic areas within aged liver tissue secondarily age the surrounding environment through secreted factors, and that this leads to the expansion of the aged environment.
Furthermore, they also elucidated the mechanism by which endothelial cells lose their tissue-specific identity and induce innate immune responses, promoting immune cell infiltration. Through spatial transcriptome analysis, the spatial distribution of fibroblasts interacting with immune cells was quantified, revealing their involvement in tissue regeneration, induction of inflammatory responses, and progression to chronic fibrosis.
The research team performed integrated analysis of multi-omics\* data to obtain transcriptome and epigenome information, precisely interpreting the microenvironment of aged liver tissue and its spatial heterogeneity, and confirming how these changes are connected to the intrahepatic vascular structure.
*Multi-omics: An integrated analysis method for various biological information within an organism, such as genes, proteins, metabolites, and cell information.
The newly developed ‘FiNi-seq’ technology is expected to be a useful platform for high-resolution capture of pathophysiological signals in most chronic liver diseases, including the aging process that causes fibrosis.
< Figure 1. Isolation of fibrotic regions from aged liver tissue, followed by single-cell transcriptome analysis and validation in a fibrosis model. >
The first author, Dr. Kwon Yong Tak of KAIST Graduate School of Medical Science and Engineering (GSMSE), a hepatologist at Seoul St. Mary's Hospital, designed this study to lay the groundwork for early diagnosis and treatment of fibrosis progression, the most important clinical prognostic indicator in chronic liver disease, while pursuing his Ph.D. at KAIST KAIST GSMSE with support from the physician-scientist training program. Co-first author Myungsun Park, a Ph.D. candidate at KAIST KAIST GSMSE, was responsible for the technical implementation of FiNi-seq technology, and Juyeon Kim, a Ph.D. candidate at KRIBB's Aging Convergence Research Center, was responsible for imaging analysis of aged tissue, playing a key role in the research.
Dr. Chuna Kim of KRIBB stated, “Through this study, we were able to precisely elucidate the cellular composition and spatial characteristics of the fibrotic microenvironment observed in aged liver tissue at the single-cell level.”
< Figure 2. Spatially defined stepwise progression patterns of aging-related regions within the liver and identification of regulatory factors inducing them. >
Professor Jong-Eun Park of the Graduate School of Medical Science and Engineering said, “As an analytical technology that can capture subtle changes occurring in the early stages of aging and chronic diseases, it is expected to play a significant role in finding effective treatment targets in the future. Also, we plan to expand this research to chronic diseases in other organs such as the lungs and kidneys, as well as various liver disease models.”
This research was published in the international journal ‘Nature Aging’ on May 5, 2025, with Dr. Kwon Yong Tak of KAIST KAIST GSMSE, Ph.D. Candidate Juyeon Kim of KRIBB, and Ph.D. Candidate Myungsun Park of KAIST as co-first authors.
*Paper Title: Quasi-spatial single-cell transcriptome based on physical tissue properties defines early aging associated niche in liver
*DOI: https://doi.org/10.1038/s43587-025-00857-7
This research was supported by several domestic institutions, including the National Research Foundation of Korea, the Korea Health Industry Development Institute (KHIDI), the Korea Research Institute of Bioscience and Biotechnology (KRIBB), KIST, POSCO Science Fellowship, and the Convergence Medical Scientist Training Program.
2025.06.12 View 1116 -
 KAIST Turns an Unprecedented Idea into Reality: Quantum Computing with Magnets
What started as an idea under KAIST’s Global Singularity Research Project—"Can we build a quantum computer using magnets?"—has now become a scientific reality. A KAIST-led international research team has successfully demonstrated a core quantum computing technology using magnetic materials (ferromagnets) for the first time in the world.
KAIST (represented by President Kwang-Hyung Lee) announced on the 6th of May that a team led by Professor Kab-Jin Kim from the Department of Physics, in collaboration with the Argonne National Laboratory and the University of Illinois Urbana-Champaign (UIUC), has developed a “photon-magnon hybrid chip” and successfully implemented real-time, multi-pulse interference using magnetic materials—marking a global first.
< Photo 1. Dr. Moojune Song (left) and Professor Kab-Jin Kim (right) of KAIST Department of Physics >
In simple terms, the researchers developed a special chip that synchronizes light and internal magnetic vibrations (magnons), enabling the transmission of phase information between distant magnets. They succeeded in observing and controlling interference between multiple signals in real time. This marks the first experimental evidence that magnets can serve as key components in quantum computing, serving as a pivotal step toward magnet-based quantum platforms.
The N and S poles of a magnet stem from the spin of electrons inside atoms. When many atoms align, their collective spin vibrations create a quantum particle known as a “magnon.”
Magnons are especially promising because of their nonreciprocal nature—they can carry information in only one direction, which makes them suitable for quantum noise isolation in compact quantum chips. They can also couple with both light and microwaves, enabling the potential for long-distance quantum communication over tens of kilometers.
Moreover, using special materials like antiferromagnets could allow quantum computers to operate at terahertz (THz) frequencies, far surpassing today’s hardware limitations, and possibly enabling room-temperature quantum computing without the need for bulky cryogenic equipment.
To build such a system, however, one must be able to transmit, measure, and control the phase information of magnons—the starting point and propagation of their waveforms—in real time. This had not been achieved until now.
< Figure 1. Superconducting Circuit-Based Magnon-Photon Hybrid System. (a) Schematic diagram of the device. A NbN superconducting resonator circuit fabricated on a silicon substrate is coupled with spherical YIG magnets (250 μm diameter), and magnons are generated and measured in real-time via a vertical antenna. (b) Photograph of the actual device. The distance between the two YIG spheres is 12 mm, a distance at which they cannot influence each other without the superconducting circuit. >
Professor Kim’s team used two tiny magnetic spheres made of Yttrium Iron Garnet (YIG) placed 12 mm apart with a superconducting resonator in between—similar to those used in quantum processors by Google and IBM. They input pulses into one magnet and successfully observed lossless transmission of magnon vibrations to the second magnet via the superconducting circuit.
They confirmed that from single nanosecond pulses to four microwave pulses, the magnon vibrations maintained their phase information and demonstrated predictable constructive or destructive interference in real time—known as coherent interference.
By adjusting the pulse frequencies and their intervals, the researchers could also freely control the interference patterns of magnons, effectively showing for the first time that electrical signals can be used to manipulate magnonic quantum states.
This work demonstrated that quantum gate operations using multiple pulses—a fundamental technique in quantum information processing—can be implemented using a hybrid system of magnetic materials and superconducting circuits. This opens the door for the practical use of magnet-based quantum devices.
< Figure 2. Experimental Data. (a) Measurement results of magnon-magnon band anticrossing via continuous wave measurement, showing the formation of a strong coupling hybrid system. (b) Magnon pulse exchange oscillation phenomenon between YIG spheres upon single pulse application. It can be seen that magnon information is coherently transmitted at regular time intervals through the superconducting circuit. (c,d) Magnon interference phenomenon upon dual pulse application. The magnon information state can be arbitrarily controlled by adjusting the time interval and carrier frequency between pulses. >
Professor Kab-Jin Kim stated, “This project began with a bold, even unconventional idea proposed to the Global Singularity Research Program: ‘What if we could build a quantum computer with magnets?’ The journey has been fascinating, and this study not only opens a new field of quantum spintronics, but also marks a turning point in developing high-efficiency quantum information processing devices.”
The research was co-led by postdoctoral researcher Moojune Song (KAIST), Dr. Yi Li and Dr. Valentine Novosad from Argonne National Lab, and Prof. Axel Hoffmann’s team at UIUC. The results were published in Nature Communications on April 17 and npj Spintronics on April 1, 2025.
Paper 1: Single-shot magnon interference in a magnon-superconducting-resonator hybrid circuit, Nat. Commun. 16, 3649 (2025)
DOI: https://doi.org/10.1038/s41467-025-58482-2
Paper 2: Single-shot electrical detection of short-wavelength magnon pulse transmission in a magnonic ultra-thin-film waveguide, npj Spintronics 3, 12 (2025)
DOI: https://doi.org/10.1038/s44306-025-00072-5
The research was supported by KAIST’s Global Singularity Research Initiative, the National Research Foundation of Korea (including the Mid-Career Researcher, Leading Research Center, and Quantum Information Science Human Resource Development programs), and the U.S. Department of Energy.
2025.06.12 View 2098
KAIST Turns an Unprecedented Idea into Reality: Quantum Computing with Magnets
What started as an idea under KAIST’s Global Singularity Research Project—"Can we build a quantum computer using magnets?"—has now become a scientific reality. A KAIST-led international research team has successfully demonstrated a core quantum computing technology using magnetic materials (ferromagnets) for the first time in the world.
KAIST (represented by President Kwang-Hyung Lee) announced on the 6th of May that a team led by Professor Kab-Jin Kim from the Department of Physics, in collaboration with the Argonne National Laboratory and the University of Illinois Urbana-Champaign (UIUC), has developed a “photon-magnon hybrid chip” and successfully implemented real-time, multi-pulse interference using magnetic materials—marking a global first.
< Photo 1. Dr. Moojune Song (left) and Professor Kab-Jin Kim (right) of KAIST Department of Physics >
In simple terms, the researchers developed a special chip that synchronizes light and internal magnetic vibrations (magnons), enabling the transmission of phase information between distant magnets. They succeeded in observing and controlling interference between multiple signals in real time. This marks the first experimental evidence that magnets can serve as key components in quantum computing, serving as a pivotal step toward magnet-based quantum platforms.
The N and S poles of a magnet stem from the spin of electrons inside atoms. When many atoms align, their collective spin vibrations create a quantum particle known as a “magnon.”
Magnons are especially promising because of their nonreciprocal nature—they can carry information in only one direction, which makes them suitable for quantum noise isolation in compact quantum chips. They can also couple with both light and microwaves, enabling the potential for long-distance quantum communication over tens of kilometers.
Moreover, using special materials like antiferromagnets could allow quantum computers to operate at terahertz (THz) frequencies, far surpassing today’s hardware limitations, and possibly enabling room-temperature quantum computing without the need for bulky cryogenic equipment.
To build such a system, however, one must be able to transmit, measure, and control the phase information of magnons—the starting point and propagation of their waveforms—in real time. This had not been achieved until now.
< Figure 1. Superconducting Circuit-Based Magnon-Photon Hybrid System. (a) Schematic diagram of the device. A NbN superconducting resonator circuit fabricated on a silicon substrate is coupled with spherical YIG magnets (250 μm diameter), and magnons are generated and measured in real-time via a vertical antenna. (b) Photograph of the actual device. The distance between the two YIG spheres is 12 mm, a distance at which they cannot influence each other without the superconducting circuit. >
Professor Kim’s team used two tiny magnetic spheres made of Yttrium Iron Garnet (YIG) placed 12 mm apart with a superconducting resonator in between—similar to those used in quantum processors by Google and IBM. They input pulses into one magnet and successfully observed lossless transmission of magnon vibrations to the second magnet via the superconducting circuit.
They confirmed that from single nanosecond pulses to four microwave pulses, the magnon vibrations maintained their phase information and demonstrated predictable constructive or destructive interference in real time—known as coherent interference.
By adjusting the pulse frequencies and their intervals, the researchers could also freely control the interference patterns of magnons, effectively showing for the first time that electrical signals can be used to manipulate magnonic quantum states.
This work demonstrated that quantum gate operations using multiple pulses—a fundamental technique in quantum information processing—can be implemented using a hybrid system of magnetic materials and superconducting circuits. This opens the door for the practical use of magnet-based quantum devices.
< Figure 2. Experimental Data. (a) Measurement results of magnon-magnon band anticrossing via continuous wave measurement, showing the formation of a strong coupling hybrid system. (b) Magnon pulse exchange oscillation phenomenon between YIG spheres upon single pulse application. It can be seen that magnon information is coherently transmitted at regular time intervals through the superconducting circuit. (c,d) Magnon interference phenomenon upon dual pulse application. The magnon information state can be arbitrarily controlled by adjusting the time interval and carrier frequency between pulses. >
Professor Kab-Jin Kim stated, “This project began with a bold, even unconventional idea proposed to the Global Singularity Research Program: ‘What if we could build a quantum computer with magnets?’ The journey has been fascinating, and this study not only opens a new field of quantum spintronics, but also marks a turning point in developing high-efficiency quantum information processing devices.”
The research was co-led by postdoctoral researcher Moojune Song (KAIST), Dr. Yi Li and Dr. Valentine Novosad from Argonne National Lab, and Prof. Axel Hoffmann’s team at UIUC. The results were published in Nature Communications on April 17 and npj Spintronics on April 1, 2025.
Paper 1: Single-shot magnon interference in a magnon-superconducting-resonator hybrid circuit, Nat. Commun. 16, 3649 (2025)
DOI: https://doi.org/10.1038/s41467-025-58482-2
Paper 2: Single-shot electrical detection of short-wavelength magnon pulse transmission in a magnonic ultra-thin-film waveguide, npj Spintronics 3, 12 (2025)
DOI: https://doi.org/10.1038/s44306-025-00072-5
The research was supported by KAIST’s Global Singularity Research Initiative, the National Research Foundation of Korea (including the Mid-Career Researcher, Leading Research Center, and Quantum Information Science Human Resource Development programs), and the U.S. Department of Energy.
2025.06.12 View 2098 -
 KAIST Successfully Develops High-Performance Water Electrolysis Without Platinum, Bringing Hydrogen Economy Closer
< Photo 1. (Front row, from left) Jeesoo Park (Ph.D. Candidate), Professor Hee-Tak Kim (Back row, from left) Kyunghwa Seok (Ph.D. Candidate), Dr. Gisu Doo, Euntaek Oh (Ph.D. Candidate) >
Hydrogen is gaining attention as a clean energy source that emits no carbon. Among various methods, water electrolysis, which splits water into hydrogen and oxygen using electricity, is recognized as an eco-friendly hydrogen production method. Specifically, proton exchange membrane water electrolysis (PEMWE) is considered a next-generation hydrogen production technology due to its ability to produce high-purity hydrogen at high pressure. However, existing PEMWE technology has faced limitations in commercialization due to its heavy reliance on expensive precious metal catalysts and coating materials. Korean researchers have now proposed a new solution to address these technical and economic bottlenecks.
KAIST (President Kwang Hyung Lee) announced on June 11th that a research team led by Professor Hee-Tak Kim of the Department of Chemical and Biomolecular Engineering, in a joint study with Dr. Gisu Doo of the Korea Institute of Energy Research (KIER, President Chang-keun Lee), has developed a next-generation water electrolysis technology that achieves high performance without the need for expensive platinum (Pt) coating.
The research team focused on the primary reason why 'iridium oxide (IrOx),' a highly active catalyst for water electrolysis electrodes, fails to perform optimally. They found that this is due to inefficient electron transfer and, for the first time in the world, demonstrated that performance can be maximized simply by controlling the catalyst particle size.
In this study, it was revealed that the reason iridium oxide catalysts do not exhibit excellent performance without platinum coating is due to 'electron transport resistance' that occurs at the interface between the catalyst, the ion conductor (hereinafter referred to as ionomer), and the Ti (titanium) substrate—core components inherently used together in water electrolysis electrodes.
Specifically, they identified that the 'pinch-off' phenomenon, where the electron pathway is blocked between the catalyst, ionomer, and titanium substrate, is the critical cause of reduced conductivity. The ionomer has properties close to an electron insulator, thereby hindering electron flow when it surrounds catalyst particles. Furthermore, when the ionomer comes into contact with the titanium substrate, an electron barrier forms on the surface oxide layer of the titanium substrate, significantly increasing resistance.
< Figure 1. Infographic related to electron transport resistance at the catalyst layer/diffusion layer interface >
To address this, the research team fabricated and compared catalysts of various particle sizes. Through single-cell evaluation and multiphysics simulations, they demonstrated, for the first time globally, that when iridium oxide catalyst particles with a size of 20 nanometers (nm) or larger are used, the ionomer mixed region decreases, ensuring an electron pathway and restoring conductivity.
Moreover, they successfully optimized the interfacial structure through precise design, simultaneously ensuring both reactivity and electron transport. This achievement demonstrated that the previously unavoidable trade-off between catalyst activity and conductivity can be overcome through meticulous interfacial design.
This breakthrough is expected to be a significant milestone not only for the development of high-performance catalyst materials but also for the future commercialization of proton exchange membrane water electrolysis systems that can achieve high efficiency while drastically reducing the amount of precious metals used.
Professor Hee-Tak Kim stated, "This research presents a new interface design strategy that can resolve the interfacial conductivity problem, which was a bottleneck in high-performance water electrolysis technology." He added, "By securing high performance even without expensive materials like platinum, it will be a stepping stone closer to realizing a hydrogen economy."
This research, with Jeesoo Park, a Ph.D. student from the Department of Chemical and Biomolecular Engineering at KAIST, as the first author, was published on June 7th in 'Energy & Environmental Science' (IF: 32.4, 2025), a leading international journal in the energy and environmental fields, and was recognized for its innovativeness and impact. (Paper title: On the interface electron transport problem of highly active IrOx catalysts, DOI: 10.1039/D4EE05816J).
This research was supported by the New and Renewable Energy Core Technology Development Project of the Ministry of Trade, Industry and Energy.
2025.06.11 View 1680
KAIST Successfully Develops High-Performance Water Electrolysis Without Platinum, Bringing Hydrogen Economy Closer
< Photo 1. (Front row, from left) Jeesoo Park (Ph.D. Candidate), Professor Hee-Tak Kim (Back row, from left) Kyunghwa Seok (Ph.D. Candidate), Dr. Gisu Doo, Euntaek Oh (Ph.D. Candidate) >
Hydrogen is gaining attention as a clean energy source that emits no carbon. Among various methods, water electrolysis, which splits water into hydrogen and oxygen using electricity, is recognized as an eco-friendly hydrogen production method. Specifically, proton exchange membrane water electrolysis (PEMWE) is considered a next-generation hydrogen production technology due to its ability to produce high-purity hydrogen at high pressure. However, existing PEMWE technology has faced limitations in commercialization due to its heavy reliance on expensive precious metal catalysts and coating materials. Korean researchers have now proposed a new solution to address these technical and economic bottlenecks.
KAIST (President Kwang Hyung Lee) announced on June 11th that a research team led by Professor Hee-Tak Kim of the Department of Chemical and Biomolecular Engineering, in a joint study with Dr. Gisu Doo of the Korea Institute of Energy Research (KIER, President Chang-keun Lee), has developed a next-generation water electrolysis technology that achieves high performance without the need for expensive platinum (Pt) coating.
The research team focused on the primary reason why 'iridium oxide (IrOx),' a highly active catalyst for water electrolysis electrodes, fails to perform optimally. They found that this is due to inefficient electron transfer and, for the first time in the world, demonstrated that performance can be maximized simply by controlling the catalyst particle size.
In this study, it was revealed that the reason iridium oxide catalysts do not exhibit excellent performance without platinum coating is due to 'electron transport resistance' that occurs at the interface between the catalyst, the ion conductor (hereinafter referred to as ionomer), and the Ti (titanium) substrate—core components inherently used together in water electrolysis electrodes.
Specifically, they identified that the 'pinch-off' phenomenon, where the electron pathway is blocked between the catalyst, ionomer, and titanium substrate, is the critical cause of reduced conductivity. The ionomer has properties close to an electron insulator, thereby hindering electron flow when it surrounds catalyst particles. Furthermore, when the ionomer comes into contact with the titanium substrate, an electron barrier forms on the surface oxide layer of the titanium substrate, significantly increasing resistance.
< Figure 1. Infographic related to electron transport resistance at the catalyst layer/diffusion layer interface >
To address this, the research team fabricated and compared catalysts of various particle sizes. Through single-cell evaluation and multiphysics simulations, they demonstrated, for the first time globally, that when iridium oxide catalyst particles with a size of 20 nanometers (nm) or larger are used, the ionomer mixed region decreases, ensuring an electron pathway and restoring conductivity.
Moreover, they successfully optimized the interfacial structure through precise design, simultaneously ensuring both reactivity and electron transport. This achievement demonstrated that the previously unavoidable trade-off between catalyst activity and conductivity can be overcome through meticulous interfacial design.
This breakthrough is expected to be a significant milestone not only for the development of high-performance catalyst materials but also for the future commercialization of proton exchange membrane water electrolysis systems that can achieve high efficiency while drastically reducing the amount of precious metals used.
Professor Hee-Tak Kim stated, "This research presents a new interface design strategy that can resolve the interfacial conductivity problem, which was a bottleneck in high-performance water electrolysis technology." He added, "By securing high performance even without expensive materials like platinum, it will be a stepping stone closer to realizing a hydrogen economy."
This research, with Jeesoo Park, a Ph.D. student from the Department of Chemical and Biomolecular Engineering at KAIST, as the first author, was published on June 7th in 'Energy & Environmental Science' (IF: 32.4, 2025), a leading international journal in the energy and environmental fields, and was recognized for its innovativeness and impact. (Paper title: On the interface electron transport problem of highly active IrOx catalysts, DOI: 10.1039/D4EE05816J).
This research was supported by the New and Renewable Energy Core Technology Development Project of the Ministry of Trade, Industry and Energy.
2025.06.11 View 1680