College+of+Engineering
-
 KAIST Honors BMW and Hyundai with the 2022 Future Mobility of the Year Award
BMW ‘iVision Circular’, Commercial Vehicle-Hyundai Motors ‘Trailer Drone’ selected as winners of the international awards for concept cars established by KAIST Cho Chun Shik Graduate School of Mobility to honor car makers that strive to present new visions in the field of eco-friendly design of automobiles and unmanned logistics.
KAIST (President Kwang Hyung Lee) hosted the “2022 Future Mobility of the Year (FMOTY) Awards” at the Convention Hall of the BEXCO International Motor Show at Busan in the afternoon of the 14th.
The Future Mobility of the Year Awards is an award ceremony that selects a model that showcases useful transportation technology and innovative service concepts for the future society among the set of concept cars exhibited at the motor show.
As a one-of-a-kind international concept car awards established by KAIST's Cho Chun Shik Graduate School of Mobility (Headed by Professor Jang In-Gwon), the auto journalists from 11 countries were invited to be the jurors to select the winner. With the inaugural awards ceremony held in 2019, over the past three years, automakers from around the globe, including internationally renowned automakers, such as, Volvo/Toyota (2019), Honda/Hyundai (2020), and Renault (2021), even a new start-up car manufacturer like Canoo, the winner of last year’s award for commercial vehicles, were honored for their award-winning works.
At this year’s awards ceremony, the 4th of its kind, BMW's “iVision Circular” and Hyundai's “'Trailer Drone” were selected as the best concept cars of the year, the former from the Private Mobility category and the latter from the Public & Commercial Vehicles category.
The jury consisting of 16 domestic and foreign auto journalists, including BBC Top Gear's Paul Horrell and Car Magazine’s Georg Kacher, evaluated 53 concept car contestants that made their entry last year. The jurors’ general comment was that while the trend of the global automobile market flowing fast towards electric vehicles, this year's award-winning works presented a new vision in the field of eco-friendly design and unmanned logistics.
Private Mobility Categry Winner: BMW iVision Circular
BMW's 'iVision Circular', the winner of the Private Mobility category, is an eco-friendly compact car in which all parts of the vehicle are designed with recycled and/or natural materials. It has received favorable reviews for its in-depth implementation of the concept of a futuristic eco-friendly car by manufacturing the tires from natural rubber and adopting a design that made recycling of its parts very easily when the car is to be disposed of.
Public & Commercial Vehicles Categry Winner: Hyundai Trailer Drone
Hyundai Motor Company’s “Trailer Drone”, the winner of the Public & Commercial Vehicles category, is an eco-friendly autonomous driving truck that can transport large-scale logistics from a port to a destination without a human driver while two unmanned vehicles push and drag a trailer. The concept car won supports from a large number of judges for the blueprint it presented for a groundbreaking logistics service that applied both eco-friendly hydrogen fuel cell and fully autonomous driving technology.
Jurors from overseas congratulated the development team of BMW and Hyundai Motor Company via a video message for providing a new direction for the global automobile industry as it strives to transform in line with the changes in the post-pandemic era.
Professor Bo-won Kim, the Vice President for Planning and Budget of KAIST, who presented the awards, said, “It is time for the K-Mobility wave to sweep over the global mobility industry.” “KAIST will lead in the various fields of mobility technologies to support global automakers,” he added.
Splitting the center are KAIST Vice President Bo-Won Kim on the right, and Seong-Kwon Lee,
the Deputy Mayor of the City of Busan on the left. To Kim's left is the Senior VP of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, Jean-Philippe Parain, and to Lee's Right is Sangyup Lee,
the Head of Hyundai Motor Design Center and the Executive VP of Hyundai Motors.
At the ceremony, along with KAIST officials, including Vice President Bo-Won Kim and Professor In-Gwon Jang, the Head of Cho Chun Shik Graduate School of Mobility, are the Deputy Mayor Seong-Kwon Lee of the City of Busan and the figures from the automobile industry, including Jean-Philippe Parain, the Senior Vice President of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, who is visiting Korea to receive the '2022 Future Mobility' award, and Sangyup Lee, the Head of Hyundai Motor Design Center and the Executive Vice President of Hyundai Motor Company, were in the attendance.
More information about the awards ceremony and winning works are available at the official website of this year's Future Mobility Awards (www.fmoty.org).
Profile:In-Gwon Jang, Ph.D.Presidentthe Organizing Committeethe Future Mobility of the Year Awardshttp://www.fmoty.org/
Head ProfessorKAIST Cho Chun Shik Graduate School of Mobilityhttps://gt.kaist.ac.kr
2022.07.14 View 7490
KAIST Honors BMW and Hyundai with the 2022 Future Mobility of the Year Award
BMW ‘iVision Circular’, Commercial Vehicle-Hyundai Motors ‘Trailer Drone’ selected as winners of the international awards for concept cars established by KAIST Cho Chun Shik Graduate School of Mobility to honor car makers that strive to present new visions in the field of eco-friendly design of automobiles and unmanned logistics.
KAIST (President Kwang Hyung Lee) hosted the “2022 Future Mobility of the Year (FMOTY) Awards” at the Convention Hall of the BEXCO International Motor Show at Busan in the afternoon of the 14th.
The Future Mobility of the Year Awards is an award ceremony that selects a model that showcases useful transportation technology and innovative service concepts for the future society among the set of concept cars exhibited at the motor show.
As a one-of-a-kind international concept car awards established by KAIST's Cho Chun Shik Graduate School of Mobility (Headed by Professor Jang In-Gwon), the auto journalists from 11 countries were invited to be the jurors to select the winner. With the inaugural awards ceremony held in 2019, over the past three years, automakers from around the globe, including internationally renowned automakers, such as, Volvo/Toyota (2019), Honda/Hyundai (2020), and Renault (2021), even a new start-up car manufacturer like Canoo, the winner of last year’s award for commercial vehicles, were honored for their award-winning works.
At this year’s awards ceremony, the 4th of its kind, BMW's “iVision Circular” and Hyundai's “'Trailer Drone” were selected as the best concept cars of the year, the former from the Private Mobility category and the latter from the Public & Commercial Vehicles category.
The jury consisting of 16 domestic and foreign auto journalists, including BBC Top Gear's Paul Horrell and Car Magazine’s Georg Kacher, evaluated 53 concept car contestants that made their entry last year. The jurors’ general comment was that while the trend of the global automobile market flowing fast towards electric vehicles, this year's award-winning works presented a new vision in the field of eco-friendly design and unmanned logistics.
Private Mobility Categry Winner: BMW iVision Circular
BMW's 'iVision Circular', the winner of the Private Mobility category, is an eco-friendly compact car in which all parts of the vehicle are designed with recycled and/or natural materials. It has received favorable reviews for its in-depth implementation of the concept of a futuristic eco-friendly car by manufacturing the tires from natural rubber and adopting a design that made recycling of its parts very easily when the car is to be disposed of.
Public & Commercial Vehicles Categry Winner: Hyundai Trailer Drone
Hyundai Motor Company’s “Trailer Drone”, the winner of the Public & Commercial Vehicles category, is an eco-friendly autonomous driving truck that can transport large-scale logistics from a port to a destination without a human driver while two unmanned vehicles push and drag a trailer. The concept car won supports from a large number of judges for the blueprint it presented for a groundbreaking logistics service that applied both eco-friendly hydrogen fuel cell and fully autonomous driving technology.
Jurors from overseas congratulated the development team of BMW and Hyundai Motor Company via a video message for providing a new direction for the global automobile industry as it strives to transform in line with the changes in the post-pandemic era.
Professor Bo-won Kim, the Vice President for Planning and Budget of KAIST, who presented the awards, said, “It is time for the K-Mobility wave to sweep over the global mobility industry.” “KAIST will lead in the various fields of mobility technologies to support global automakers,” he added.
Splitting the center are KAIST Vice President Bo-Won Kim on the right, and Seong-Kwon Lee,
the Deputy Mayor of the City of Busan on the left. To Kim's left is the Senior VP of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, Jean-Philippe Parain, and to Lee's Right is Sangyup Lee,
the Head of Hyundai Motor Design Center and the Executive VP of Hyundai Motors.
At the ceremony, along with KAIST officials, including Vice President Bo-Won Kim and Professor In-Gwon Jang, the Head of Cho Chun Shik Graduate School of Mobility, are the Deputy Mayor Seong-Kwon Lee of the City of Busan and the figures from the automobile industry, including Jean-Philippe Parain, the Senior Vice President of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, who is visiting Korea to receive the '2022 Future Mobility' award, and Sangyup Lee, the Head of Hyundai Motor Design Center and the Executive Vice President of Hyundai Motor Company, were in the attendance.
More information about the awards ceremony and winning works are available at the official website of this year's Future Mobility Awards (www.fmoty.org).
Profile:In-Gwon Jang, Ph.D.Presidentthe Organizing Committeethe Future Mobility of the Year Awardshttp://www.fmoty.org/
Head ProfessorKAIST Cho Chun Shik Graduate School of Mobilityhttps://gt.kaist.ac.kr
2022.07.14 View 7490 -
 An AI-based, Indoor/Outdoor-Integrated (IOI) GPS System to Bring Seismic Waves in the Terrains of Positioning Technology
KAIST breaks new grounds in positioning technology with an AI-integrated GPS board that works both indoors and out
KAIST (President Kwang Hyung Lee) announced on the 8th that Professor Dong-Soo Han's research team (Intelligent Service Integration Lab) from the School of Computing has developed a GPS system that works both indoors and outdoors with quality precision regardless of the environment.
This Indoor/Outdoor-Integrated GPS System, or IOI GPS System, for short, uses the GPS signals outdoors and estimates locations indoors using signals from multiple sources like an inertial sensor, pressure sensors, geomagnetic sensors, and light sensors. To this end, the research team developed techniques to detect environmental changes such as entering a building, and methods to detect entrances, ground floors, stairs, elevators and levels of buildings by utilizing artificial intelligence techniques. Various landmark detecting techniques were also incorporated with pedestrian dead reckoning (PDR), a navigation tool for pedestrians, to devise the so-called “Sensor-Fusion Positioning Algorithm”.
To date, it was common to estimate locations based on wireless LAN signals or base station signals in a space where the GPS signal could not reach. However, the IOI GPS enables positioning even in buildings without signals nor indoor maps.
The algorithm developed by the research team can provide accurate floor information within a building where even big tech companies like Google and Apple's positioning services do not provide. Unlike other positioning methods that rely on visual data, geomagnetic positioning techniques, or wireless LAN, this system also has the advantage of not requiring any prior preparation. In other words, the foundation to enable the usage of a universal GPS system that works both indoors and outdoors anywhere in the world is now ready.
The research team also produced a circuit board for the purpose of operating the IOI GPS System, mounted with chips to receive and process GPS, Wi-Fi, and Bluetooth signals, along with an inertial sensor, a barometer, a magnetometer, and a light sensor. The sensor-fusion positioning algorithm the lab has developed is also incorporated in the board.
When the accuracy of the IOI GPS board was tested in the N1 building of KAIST’s main campus in Daejeon, it achieved an accuracy of about 95% in floor estimation and an accuracy of about 3 to 6 meters in distance estimation. As for the indoor/outdoor transition, the navigational mode change was completed in about 0.3 seconds. When it was combined with the PDR technique, the estimation accuracy improved further down to a scope of one meter.
The research team is now working on assembling a tag with a built-in positioning board and applying it to location-based docent services for visitors at museums, science centers, and art galleries. The IOI GPS tag can be used for the purpose of tracking children and/or the elderly, and it can also be used to locate people or rescue workers lost in disaster-ridden or hazardous sites. On a different note, the sensor-fusion positioning algorithm and positioning board for vehicles are also under development for the tracking of vehicles entering indoor areas like underground parking lots.
When the IOI GPS board for vehicles is manufactured, the research team will work to collaborate with car manufacturers and car rental companies, and will also develop a sensor-fusion positioning algorithm for smartphones. Telecommunication companies seeking to diversify their programs in the field of location-based services will also be interested in the use the IOI GPS.
Professor Dong-Soo Han of the School of Computing, who leads the research team, said, “This is the first time to develop an indoor/outdoor integrated GPS system that can pinpoint locations in a building where there is no wireless signal or an indoor map, and there are an infinite number of areas it can be applied to. When the integration with the Korea Augmentation Satellite System (KASS) and the Korean GPS (KPS) System that began this year, is finally completed, Korea can become the leader in the field of GPS both indoors and outdoors, and we also have plans to manufacture semi-conductor chips for the IOI GPS System to keep the tech-gap between Korea and the followers.”
He added, "The guidance services at science centers, museums, and art galleries that uses IOI GPS tags can provide a set of data that would be very helpful for analyzing the visitors’ viewing traces. It is an essential piece of information required when the time comes to decide when to organize the next exhibit. We will be working on having it applied to the National Science Museum, first.”
The projects to develop the IOI GPS system and the trace analysis system for science centers were supported through Science, Culture, Exhibits and Services Capability Enhancement Program of the Ministry of Science and ICT.
Profile: Dong-Soo Han, Ph.D.Professorddsshhan@kaist.ac.krhttp://isilab.kaist.ac.kr
Intelligent Service Integration Lab.School of Computing
http://kaist.ac.kr/en/
Korea Advanced Institute of Science and Technology (KAIST)Daejeon, Republic of Korea
2022.07.13 View 6322
An AI-based, Indoor/Outdoor-Integrated (IOI) GPS System to Bring Seismic Waves in the Terrains of Positioning Technology
KAIST breaks new grounds in positioning technology with an AI-integrated GPS board that works both indoors and out
KAIST (President Kwang Hyung Lee) announced on the 8th that Professor Dong-Soo Han's research team (Intelligent Service Integration Lab) from the School of Computing has developed a GPS system that works both indoors and outdoors with quality precision regardless of the environment.
This Indoor/Outdoor-Integrated GPS System, or IOI GPS System, for short, uses the GPS signals outdoors and estimates locations indoors using signals from multiple sources like an inertial sensor, pressure sensors, geomagnetic sensors, and light sensors. To this end, the research team developed techniques to detect environmental changes such as entering a building, and methods to detect entrances, ground floors, stairs, elevators and levels of buildings by utilizing artificial intelligence techniques. Various landmark detecting techniques were also incorporated with pedestrian dead reckoning (PDR), a navigation tool for pedestrians, to devise the so-called “Sensor-Fusion Positioning Algorithm”.
To date, it was common to estimate locations based on wireless LAN signals or base station signals in a space where the GPS signal could not reach. However, the IOI GPS enables positioning even in buildings without signals nor indoor maps.
The algorithm developed by the research team can provide accurate floor information within a building where even big tech companies like Google and Apple's positioning services do not provide. Unlike other positioning methods that rely on visual data, geomagnetic positioning techniques, or wireless LAN, this system also has the advantage of not requiring any prior preparation. In other words, the foundation to enable the usage of a universal GPS system that works both indoors and outdoors anywhere in the world is now ready.
The research team also produced a circuit board for the purpose of operating the IOI GPS System, mounted with chips to receive and process GPS, Wi-Fi, and Bluetooth signals, along with an inertial sensor, a barometer, a magnetometer, and a light sensor. The sensor-fusion positioning algorithm the lab has developed is also incorporated in the board.
When the accuracy of the IOI GPS board was tested in the N1 building of KAIST’s main campus in Daejeon, it achieved an accuracy of about 95% in floor estimation and an accuracy of about 3 to 6 meters in distance estimation. As for the indoor/outdoor transition, the navigational mode change was completed in about 0.3 seconds. When it was combined with the PDR technique, the estimation accuracy improved further down to a scope of one meter.
The research team is now working on assembling a tag with a built-in positioning board and applying it to location-based docent services for visitors at museums, science centers, and art galleries. The IOI GPS tag can be used for the purpose of tracking children and/or the elderly, and it can also be used to locate people or rescue workers lost in disaster-ridden or hazardous sites. On a different note, the sensor-fusion positioning algorithm and positioning board for vehicles are also under development for the tracking of vehicles entering indoor areas like underground parking lots.
When the IOI GPS board for vehicles is manufactured, the research team will work to collaborate with car manufacturers and car rental companies, and will also develop a sensor-fusion positioning algorithm for smartphones. Telecommunication companies seeking to diversify their programs in the field of location-based services will also be interested in the use the IOI GPS.
Professor Dong-Soo Han of the School of Computing, who leads the research team, said, “This is the first time to develop an indoor/outdoor integrated GPS system that can pinpoint locations in a building where there is no wireless signal or an indoor map, and there are an infinite number of areas it can be applied to. When the integration with the Korea Augmentation Satellite System (KASS) and the Korean GPS (KPS) System that began this year, is finally completed, Korea can become the leader in the field of GPS both indoors and outdoors, and we also have plans to manufacture semi-conductor chips for the IOI GPS System to keep the tech-gap between Korea and the followers.”
He added, "The guidance services at science centers, museums, and art galleries that uses IOI GPS tags can provide a set of data that would be very helpful for analyzing the visitors’ viewing traces. It is an essential piece of information required when the time comes to decide when to organize the next exhibit. We will be working on having it applied to the National Science Museum, first.”
The projects to develop the IOI GPS system and the trace analysis system for science centers were supported through Science, Culture, Exhibits and Services Capability Enhancement Program of the Ministry of Science and ICT.
Profile: Dong-Soo Han, Ph.D.Professorddsshhan@kaist.ac.krhttp://isilab.kaist.ac.kr
Intelligent Service Integration Lab.School of Computing
http://kaist.ac.kr/en/
Korea Advanced Institute of Science and Technology (KAIST)Daejeon, Republic of Korea
2022.07.13 View 6322 -
 Atomically-Smooth Gold Crystals Help to Compress Light for Nanophotonic Applications
Highly compressed mid-infrared optical waves in a thin dielectric crystal on monocrystalline gold substrate investigated for the first time using a high-resolution scattering-type scanning near-field optical microscope.
KAIST researchers and their collaborators at home and abroad have successfully demonstrated a new platform for guiding the compressed light waves in very thin van der Waals crystals. Their method to guide the mid-infrared light with minimal loss will provide a breakthrough for the practical applications of ultra-thin dielectric crystals in next-generation optoelectronic devices based on strong light-matter interactions at the nanoscale.
Phonon-polaritons are collective oscillations of ions in polar dielectrics coupled to electromagnetic waves of light, whose electromagnetic field is much more compressed compared to the light wavelength. Recently, it was demonstrated that the phonon-polaritons in thin van der Waals crystals can be compressed even further when the material is placed on top of a highly conductive metal. In such a configuration, charges in the polaritonic crystal are “reflected” in the metal, and their coupling with light results in a new type of polariton waves called the image phonon-polaritons. Highly compressed image modes provide strong light-matter interactions, but are very sensitive to the substrate roughness, which hinders their practical application.
Challenged by these limitations, four research groups combined their efforts to develop a unique experimental platform using advanced fabrication and measurement methods. Their findings were published in Science Advances on July 13.
A KAIST research team led by Professor Min Seok Jang from the School of Electrical Engineering used a highly sensitive scanning near-field optical microscope (SNOM) to directly measure the optical fields of the hyperbolic image phonon-polaritons (HIP) propagating in a 63 nm-thick slab of hexagonal boron nitride (h-BN) on a monocrystalline gold substrate, showing the mid-infrared light waves in dielectric crystal compressed by a hundred times.
Professor Jang and a research professor in his group, Sergey Menabde, successfully obtained direct images of HIP waves propagating for many wavelengths, and detected a signal from the ultra-compressed high-order HIP in a regular h-BN crystals for the first time. They showed that the phonon-polaritons in van der Waals crystals can be significantly more compressed without sacrificing their lifetime.
This became possible due to the atomically-smooth surfaces of the home-grown gold crystals used as a substrate for the h-BN. Practically zero surface scattering and extremely small ohmic loss in gold at mid-infrared frequencies provide a low-loss environment for the HIP propagation. The HIP mode probed by the researchers was 2.4 times more compressed and yet exhibited a similar lifetime compared to the phonon-polaritons with a low-loss dielectric substrate, resulting in a twice higher figure of merit in terms of the normalized propagation length.
The ultra-smooth monocrystalline gold flakes used in the experiment were chemically grown by the team of Professor N. Asger Mortensen from the Center for Nano Optics at the University of Southern Denmark.
Mid-infrared spectrum is particularly important for sensing applications since many important organic molecules have absorption lines in the mid-infrared. However, a large number of molecules is required by the conventional detection methods for successful operation, whereas the ultra-compressed phonon-polariton fields can provide strong light-matter interactions at the microscopic level, thus significantly improving the detection limit down to a single molecule. The long lifetime of the HIP on monocrystalline gold will further improve the detection performance.
Furthermore, the study conducted by Professor Jang and the team demonstrated the striking similarity between the HIP and the image graphene plasmons. Both image modes possess significantly more confined electromagnetic field, yet their lifetime remains unaffected by the shorter polariton wavelength. This observation provides a broader perspective on image polaritons in general, and highlights their superiority in terms of the nanolight waveguiding compared to the conventional low-dimensional polaritons in van der Waals crystals on a dielectric substrate.
Professor Jang said, “Our research demonstrated the advantages of image polaritons, and especially the image phonon-polaritons. These optical modes can be used in the future optoelectronic devices where both the low-loss propagation and the strong light-matter interaction are necessary. I hope that our results will pave the way for the realization of more efficient nanophotonic devices such as metasurfaces, optical switches, sensors, and other applications operating at infrared frequencies.”
This research was funded by the Samsung Research Funding & Incubation Center of Samsung Electronics and the National Research Foundation of Korea (NRF). The Korea Institute of Science and Technology, Ministry of Education, Culture, Sports, Science and Technology of Japan, and The Villum Foundation, Denmark, also supported the work.
Figure. Nano-tip is used for the ultra-high-resolution imaging of the image phonon-polaritons in hBN launched by the gold crystal edge.
Publication:
Menabde, S. G., et al. (2022) Near-field probing of image phonon-polaritons in hexagonal boron nitride on gold crystals. Science Advances 8, Article ID: eabn0627. Available online at https://science.org/doi/10.1126/sciadv.abn0627.
Profile:
Min Seok Jang, MS, PhD
Associate Professor
jang.minseok@kaist.ac.kr
http://janglab.org/
Min Seok Jang Research Group
School of Electrical Engineering
http://kaist.ac.kr/en/
Korea Advanced Institute of Science and Technology (KAIST)
Daejeon, Republic of Korea
2022.07.13 View 7211
Atomically-Smooth Gold Crystals Help to Compress Light for Nanophotonic Applications
Highly compressed mid-infrared optical waves in a thin dielectric crystal on monocrystalline gold substrate investigated for the first time using a high-resolution scattering-type scanning near-field optical microscope.
KAIST researchers and their collaborators at home and abroad have successfully demonstrated a new platform for guiding the compressed light waves in very thin van der Waals crystals. Their method to guide the mid-infrared light with minimal loss will provide a breakthrough for the practical applications of ultra-thin dielectric crystals in next-generation optoelectronic devices based on strong light-matter interactions at the nanoscale.
Phonon-polaritons are collective oscillations of ions in polar dielectrics coupled to electromagnetic waves of light, whose electromagnetic field is much more compressed compared to the light wavelength. Recently, it was demonstrated that the phonon-polaritons in thin van der Waals crystals can be compressed even further when the material is placed on top of a highly conductive metal. In such a configuration, charges in the polaritonic crystal are “reflected” in the metal, and their coupling with light results in a new type of polariton waves called the image phonon-polaritons. Highly compressed image modes provide strong light-matter interactions, but are very sensitive to the substrate roughness, which hinders their practical application.
Challenged by these limitations, four research groups combined their efforts to develop a unique experimental platform using advanced fabrication and measurement methods. Their findings were published in Science Advances on July 13.
A KAIST research team led by Professor Min Seok Jang from the School of Electrical Engineering used a highly sensitive scanning near-field optical microscope (SNOM) to directly measure the optical fields of the hyperbolic image phonon-polaritons (HIP) propagating in a 63 nm-thick slab of hexagonal boron nitride (h-BN) on a monocrystalline gold substrate, showing the mid-infrared light waves in dielectric crystal compressed by a hundred times.
Professor Jang and a research professor in his group, Sergey Menabde, successfully obtained direct images of HIP waves propagating for many wavelengths, and detected a signal from the ultra-compressed high-order HIP in a regular h-BN crystals for the first time. They showed that the phonon-polaritons in van der Waals crystals can be significantly more compressed without sacrificing their lifetime.
This became possible due to the atomically-smooth surfaces of the home-grown gold crystals used as a substrate for the h-BN. Practically zero surface scattering and extremely small ohmic loss in gold at mid-infrared frequencies provide a low-loss environment for the HIP propagation. The HIP mode probed by the researchers was 2.4 times more compressed and yet exhibited a similar lifetime compared to the phonon-polaritons with a low-loss dielectric substrate, resulting in a twice higher figure of merit in terms of the normalized propagation length.
The ultra-smooth monocrystalline gold flakes used in the experiment were chemically grown by the team of Professor N. Asger Mortensen from the Center for Nano Optics at the University of Southern Denmark.
Mid-infrared spectrum is particularly important for sensing applications since many important organic molecules have absorption lines in the mid-infrared. However, a large number of molecules is required by the conventional detection methods for successful operation, whereas the ultra-compressed phonon-polariton fields can provide strong light-matter interactions at the microscopic level, thus significantly improving the detection limit down to a single molecule. The long lifetime of the HIP on monocrystalline gold will further improve the detection performance.
Furthermore, the study conducted by Professor Jang and the team demonstrated the striking similarity between the HIP and the image graphene plasmons. Both image modes possess significantly more confined electromagnetic field, yet their lifetime remains unaffected by the shorter polariton wavelength. This observation provides a broader perspective on image polaritons in general, and highlights their superiority in terms of the nanolight waveguiding compared to the conventional low-dimensional polaritons in van der Waals crystals on a dielectric substrate.
Professor Jang said, “Our research demonstrated the advantages of image polaritons, and especially the image phonon-polaritons. These optical modes can be used in the future optoelectronic devices where both the low-loss propagation and the strong light-matter interaction are necessary. I hope that our results will pave the way for the realization of more efficient nanophotonic devices such as metasurfaces, optical switches, sensors, and other applications operating at infrared frequencies.”
This research was funded by the Samsung Research Funding & Incubation Center of Samsung Electronics and the National Research Foundation of Korea (NRF). The Korea Institute of Science and Technology, Ministry of Education, Culture, Sports, Science and Technology of Japan, and The Villum Foundation, Denmark, also supported the work.
Figure. Nano-tip is used for the ultra-high-resolution imaging of the image phonon-polaritons in hBN launched by the gold crystal edge.
Publication:
Menabde, S. G., et al. (2022) Near-field probing of image phonon-polaritons in hexagonal boron nitride on gold crystals. Science Advances 8, Article ID: eabn0627. Available online at https://science.org/doi/10.1126/sciadv.abn0627.
Profile:
Min Seok Jang, MS, PhD
Associate Professor
jang.minseok@kaist.ac.kr
http://janglab.org/
Min Seok Jang Research Group
School of Electrical Engineering
http://kaist.ac.kr/en/
Korea Advanced Institute of Science and Technology (KAIST)
Daejeon, Republic of Korea
2022.07.13 View 7211 -
 PICASSO Technique Drives Biological Molecules into Technicolor
The new imaging approach brings current imaging colors from four to more than 15 for mapping overlapping proteins
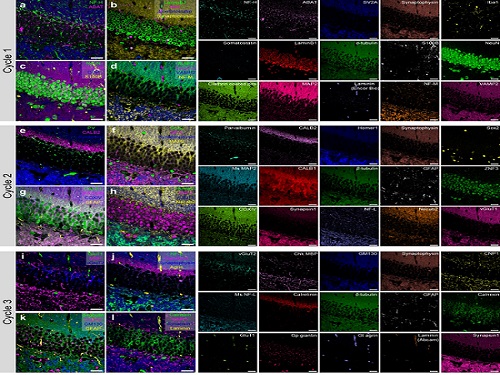
Pablo Picasso’s surreal cubist artistic style shifted common features into unrecognizable scenes, but a new imaging approach bearing his namesake may elucidate the most complicated subject: the brain. Employing artificial intelligence to clarify spectral color blending of tiny molecules used to stain specific proteins and other items of research interest, the PICASSO technique, allows researchers to use more than 15 colors to image and parse our overlapping proteins.
The PICASSO developers, based in Korea, published their approach on May 5 in Nature Communications.
Fluorophores — the staining molecules — emit specific colors when excited by a light, but if more than four fluorophores are used, their emitted colors overlap and blend. Researchers previously developed techniques to correct this spectral overlap by precisely defining the matrix of mixed and unmixed images. This measurement depends on reference spectra, found by identifying clear images of only one fluorophore-stained specimen or of multiple, identically prepared specimens that only contain a single fluorophore each.
“Such reference spectra measurement could be complicated to perform in highly heterogeneous specimens, such as the brain, due to the highly varied emission spectra of fluorophores depending on the subregions from which the spectra were measured,” said co-corresponding author Young-Gyu Yoon, professor in the School of Electrical Engineering at KAIST. He explained that the subregions would each need their own spectra reference measurements, making for an inefficient, time-consuming process. “To address this problem, we developed an approach that does not require reference spectra measurements.”
The approach is the “Process of ultra-multiplexed Imaging of biomolecules viA the unmixing of the Signals of Spectrally Overlapping fluorophores,” also known as PICASSO. Ultra-multiplexed imaging refers to visualizing the numerous individual components of a unit. Like a cinema multiplex in which each theater plays a different movie, each protein in a cell has a different role. By staining with fluorophores, researchers can begin to understand those roles.
“We devised a strategy based on information theory; unmixing is performed by iteratively minimizing the mutual information between mixed images,” said co-corresponding author Jae-Byum Chang, professor in the Department of Materials Science and Engineering, KAIST. “This allows us to get away with the assumption that the spatial distribution of different proteins is mutually exclusive and enables accurate information unmixing.”
To demonstrate PICASSO’s capabilities, the researchers applied the technique to imaging a mouse brain. With a single round of staining, they performed 15-color multiplexed imaging of a mouse brain. Although small, mouse brains are still complex, multifaceted organs that can take significant resources to map. According to the researchers, PICASSO can improve the capabilities of other imaging techniques and allow for the use of even more fluorophore colors.
Using one such imaging technique in combination with PICASSO, the team achieved 45-color multiplexed imaging of the mouse brain in only three staining and imaging cycles, according to Yoon.
“PICASSO is a versatile tool for the multiplexed biomolecule imaging of cultured cells, tissue slices and clinical specimens,” Chang said. “We anticipate that PICASSO will be useful for a broad range of applications for which biomolecules’ spatial information is important. One such application the tool would be useful for is revealing the cellular heterogeneities of tumor microenvironments, especially the heterogeneous populations of immune cells, which are closely related to cancer prognoses and the efficacy of cancer therapies.”
The Samsung Research Funding & Incubation Center for Future Technology supported this work. Spectral imaging was performed at the Korea Basic Science Institute Western Seoul Center.
-PublicationJunyoung Seo, Yeonbo Sim, Jeewon Kim, Hyunwoo Kim, In Cho, Hoyeon Nam, Yong-Gyu Yoon, Jae-Byum Chang, “PICASSO allows ultra-multiplexed fluorescence imaging of spatiallyoverlapping proteins without reference spectra measurements,” May 5, Nature Communications (doi.org/10.1038/s41467-022-30168-z)
-ProfileProfessor Jae-Byum ChangDepartment of Materials Science and EngineeringCollege of EngineeringKAIST
Professor Young-Gyu YoonSchool of Electrical EngineeringCollege of EngineeringKAIST
2022.06.22 View 5438
PICASSO Technique Drives Biological Molecules into Technicolor
The new imaging approach brings current imaging colors from four to more than 15 for mapping overlapping proteins
Pablo Picasso’s surreal cubist artistic style shifted common features into unrecognizable scenes, but a new imaging approach bearing his namesake may elucidate the most complicated subject: the brain. Employing artificial intelligence to clarify spectral color blending of tiny molecules used to stain specific proteins and other items of research interest, the PICASSO technique, allows researchers to use more than 15 colors to image and parse our overlapping proteins.
The PICASSO developers, based in Korea, published their approach on May 5 in Nature Communications.
Fluorophores — the staining molecules — emit specific colors when excited by a light, but if more than four fluorophores are used, their emitted colors overlap and blend. Researchers previously developed techniques to correct this spectral overlap by precisely defining the matrix of mixed and unmixed images. This measurement depends on reference spectra, found by identifying clear images of only one fluorophore-stained specimen or of multiple, identically prepared specimens that only contain a single fluorophore each.
“Such reference spectra measurement could be complicated to perform in highly heterogeneous specimens, such as the brain, due to the highly varied emission spectra of fluorophores depending on the subregions from which the spectra were measured,” said co-corresponding author Young-Gyu Yoon, professor in the School of Electrical Engineering at KAIST. He explained that the subregions would each need their own spectra reference measurements, making for an inefficient, time-consuming process. “To address this problem, we developed an approach that does not require reference spectra measurements.”
The approach is the “Process of ultra-multiplexed Imaging of biomolecules viA the unmixing of the Signals of Spectrally Overlapping fluorophores,” also known as PICASSO. Ultra-multiplexed imaging refers to visualizing the numerous individual components of a unit. Like a cinema multiplex in which each theater plays a different movie, each protein in a cell has a different role. By staining with fluorophores, researchers can begin to understand those roles.
“We devised a strategy based on information theory; unmixing is performed by iteratively minimizing the mutual information between mixed images,” said co-corresponding author Jae-Byum Chang, professor in the Department of Materials Science and Engineering, KAIST. “This allows us to get away with the assumption that the spatial distribution of different proteins is mutually exclusive and enables accurate information unmixing.”
To demonstrate PICASSO’s capabilities, the researchers applied the technique to imaging a mouse brain. With a single round of staining, they performed 15-color multiplexed imaging of a mouse brain. Although small, mouse brains are still complex, multifaceted organs that can take significant resources to map. According to the researchers, PICASSO can improve the capabilities of other imaging techniques and allow for the use of even more fluorophore colors.
Using one such imaging technique in combination with PICASSO, the team achieved 45-color multiplexed imaging of the mouse brain in only three staining and imaging cycles, according to Yoon.
“PICASSO is a versatile tool for the multiplexed biomolecule imaging of cultured cells, tissue slices and clinical specimens,” Chang said. “We anticipate that PICASSO will be useful for a broad range of applications for which biomolecules’ spatial information is important. One such application the tool would be useful for is revealing the cellular heterogeneities of tumor microenvironments, especially the heterogeneous populations of immune cells, which are closely related to cancer prognoses and the efficacy of cancer therapies.”
The Samsung Research Funding & Incubation Center for Future Technology supported this work. Spectral imaging was performed at the Korea Basic Science Institute Western Seoul Center.
-PublicationJunyoung Seo, Yeonbo Sim, Jeewon Kim, Hyunwoo Kim, In Cho, Hoyeon Nam, Yong-Gyu Yoon, Jae-Byum Chang, “PICASSO allows ultra-multiplexed fluorescence imaging of spatiallyoverlapping proteins without reference spectra measurements,” May 5, Nature Communications (doi.org/10.1038/s41467-022-30168-z)
-ProfileProfessor Jae-Byum ChangDepartment of Materials Science and EngineeringCollege of EngineeringKAIST
Professor Young-Gyu YoonSchool of Electrical EngineeringCollege of EngineeringKAIST
2022.06.22 View 5438 -
 KAIST & LG U+ Team Up for Quantum Computing Solution for Ultra-Space 6G Satellite Networking
KAIST quantum computer scientists have optimized ultra-space 6G Low-Earth Orbit (LEO) satellite networking, finding the shortest path to transfer data from a city to another place via multi-satellite hops.
The research team led by Professor June-Koo Kevin Rhee and Professor Dongsu Han in partnership with LG U+ verified the possibility of ultra-performance and precision communication with satellite networks using D-Wave, the first commercialized quantum computer.
Satellite network optimization has remained challenging since the network needs to be reconfigured whenever satellites approach other satellites within the connection range in a three-dimensional space. Moreover, LEO satellites orbiting at 200~2000 km above the Earth change their positions dynamically, whereas Geo-Stationary Orbit (GSO) satellites do not change their positions. Thus, LEO satellite network optimization needs to be solved in real time.
The research groups formulated the problem as a Quadratic Unconstrained Binary Optimization (QUBO) problem and managed to solve the problem, incorporating the connectivity and link distance limits as the constraints.
The proposed optimization algorithm is reported to be much more efficient in terms of hop counts and path length than previously reported studies using classical solutions. These results verify that a satellite network can provide ultra-performance (over 1Gbps user-perceived speed), and ultra-precision (less than 5ms end-to-end latency) network services, which are comparable to terrestrial communication.
Once QUBO is applied, “ultra-space networking” is expected to be realized with 6G. Researchers said that an ultra-space network provides communication services for an object moving at up to 10 km altitude with an extreme speed (~ 1000 km/h). Optimized LEO satellite networks can provide 6G communication services to currently unavailable areas such as air flights and deserts.
Professor Rhee, who is also the CEO of Qunova Computing, noted, “Collaboration with LG U+ was meaningful as we were able to find an industrial application for a quantum computer. We look forward to more quantum application research on real problems such as in communications, drug and material discovery, logistics, and fintech industries.”
2022.06.17 View 4906
KAIST & LG U+ Team Up for Quantum Computing Solution for Ultra-Space 6G Satellite Networking
KAIST quantum computer scientists have optimized ultra-space 6G Low-Earth Orbit (LEO) satellite networking, finding the shortest path to transfer data from a city to another place via multi-satellite hops.
The research team led by Professor June-Koo Kevin Rhee and Professor Dongsu Han in partnership with LG U+ verified the possibility of ultra-performance and precision communication with satellite networks using D-Wave, the first commercialized quantum computer.
Satellite network optimization has remained challenging since the network needs to be reconfigured whenever satellites approach other satellites within the connection range in a three-dimensional space. Moreover, LEO satellites orbiting at 200~2000 km above the Earth change their positions dynamically, whereas Geo-Stationary Orbit (GSO) satellites do not change their positions. Thus, LEO satellite network optimization needs to be solved in real time.
The research groups formulated the problem as a Quadratic Unconstrained Binary Optimization (QUBO) problem and managed to solve the problem, incorporating the connectivity and link distance limits as the constraints.
The proposed optimization algorithm is reported to be much more efficient in terms of hop counts and path length than previously reported studies using classical solutions. These results verify that a satellite network can provide ultra-performance (over 1Gbps user-perceived speed), and ultra-precision (less than 5ms end-to-end latency) network services, which are comparable to terrestrial communication.
Once QUBO is applied, “ultra-space networking” is expected to be realized with 6G. Researchers said that an ultra-space network provides communication services for an object moving at up to 10 km altitude with an extreme speed (~ 1000 km/h). Optimized LEO satellite networks can provide 6G communication services to currently unavailable areas such as air flights and deserts.
Professor Rhee, who is also the CEO of Qunova Computing, noted, “Collaboration with LG U+ was meaningful as we were able to find an industrial application for a quantum computer. We look forward to more quantum application research on real problems such as in communications, drug and material discovery, logistics, and fintech industries.”
2022.06.17 View 4906 -
 Professor Juho Kim’s Team Wins Best Paper Award at ACM CHI 2022
The research team led by Professor Juho Kim from the KAIST School of Computing won a Best Paper Award and an Honorable Mention Award at the Association for Computing Machinery Conference on Human Factors in Computing Systems (ACM CHI) held between April 30 and May 6.
ACM CHI is the world’s most recognized conference in the field of human computer interactions (HCI), and is ranked number one out of all HCI-related journals and conferences based on Google Scholar’s h-5 index. Best paper awards are given to works that rank in the top one percent, and honorable mention awards are given to the top five percent of the papers accepted by the conference.
Professor Juho Kim presented a total of seven papers at ACM CHI 2022, and tied for the largest number of papers. A total of 19 papers were affiliated with KAIST, putting it fifth out of all participating institutes and thereby proving KAIST’s competence in research.
One of Professor Kim’s research teams composed of Jeongyeon Kim (first author, MS graduate) from the School of Computing, MS candidate Yubin Choi from the School of Electrical Engineering, and Dr. Meng Xia (post-doctoral associate in the School of Computing, currently a post-doctoral associate at Carnegie Mellon University) received a best paper award for their paper, “Mobile-Friendly Content Design for MOOCs: Challenges, Requirements, and Design Opportunities”.
The study analyzed the difficulties experienced by learners watching video-based educational content in a mobile environment and suggests guidelines for solutions. The research team analyzed 134 survey responses and 21 interviews, and revealed that texts that are too small or overcrowded are what mainly brings down the legibility of video contents. Additionally, lighting, noise, and surrounding environments that change frequently are also important factors that may disturb a learning experience.
Based on these findings, the team analyzed the aptness of 41,722 frames from 101 video lectures for mobile environments, and confirmed that they generally show low levels of adequacy. For instance, in the case of text sizes, only 24.5% of the frames were shown to be adequate for learning in mobile environments. To overcome this issue, the research team suggested a guideline that may improve the legibility of video contents and help overcome the difficulties arising from mobile learning environments.
The importance of and dependency on video-based learning continue to rise, especially in the wake of the pandemic, and it is meaningful that this research suggested a means to analyze and tackle the difficulties of users that learn from the small screens of mobile devices. Furthermore, the paper also suggested technology that can solve problems related to video-based learning through human-AI collaborations, enhancing existing video lectures and improving learning experiences. This technology can be applied to various video-based platforms and content creation.
Meanwhile, a research team composed of Ph.D. candidate Tae Soo Kim (first author), MS candidate DaEun Choi, and Ph.D. candidate Yoonseo Choi from the School of Computing received an honorable mention award for their paper, “Stylette: styling the Web with Natural Language”.
The research team developed a novel interface technology that allows nonexperts who are unfamiliar with technical jargon to edit website features through speech. People often find it difficult to use or find the information they need from various websites due to accessibility issues, device-related constraints, inconvenient design, style preferences, etc. However, it is not easy for laymen to edit website features without expertise in programming or design, and most end up just putting up with the inconveniences. But what if the system could read the intentions of its users from their everyday language like “emphasize this part a little more”, or “I want a more modern design”, and edit the features automatically?
Based on this question, Professor Kim’s research team developed ‘Stylette’, a system in which AI analyses its users’ speech expressed in their natural language and automatically recommends a new style that best fits their intentions. The research team created a new system by putting together language AI, visual AI, and user interface technologies. On the linguistic side, a large-scale language model AI converts the intentions of the users expressed through their everyday language into adequate style elements. On the visual side, computer vision AI compares 1.7 million existing web design features and recommends a style adequate for the current website. In an experiment where 40 nonexperts were asked to edit a website design, the subjects that used this system showed double the success rate in a time span that was 35% shorter compared to the control group.
It is meaningful that this research proposed a practical case in which AI technology constructs intuitive interactions with users. The developed technology can be applied to existing design applications and web browsers in a plug-in format, and can be utilized to improve websites or for advertisements by collecting the natural intention data of users on a large scale.
2022.06.13 View 4573
Professor Juho Kim’s Team Wins Best Paper Award at ACM CHI 2022
The research team led by Professor Juho Kim from the KAIST School of Computing won a Best Paper Award and an Honorable Mention Award at the Association for Computing Machinery Conference on Human Factors in Computing Systems (ACM CHI) held between April 30 and May 6.
ACM CHI is the world’s most recognized conference in the field of human computer interactions (HCI), and is ranked number one out of all HCI-related journals and conferences based on Google Scholar’s h-5 index. Best paper awards are given to works that rank in the top one percent, and honorable mention awards are given to the top five percent of the papers accepted by the conference.
Professor Juho Kim presented a total of seven papers at ACM CHI 2022, and tied for the largest number of papers. A total of 19 papers were affiliated with KAIST, putting it fifth out of all participating institutes and thereby proving KAIST’s competence in research.
One of Professor Kim’s research teams composed of Jeongyeon Kim (first author, MS graduate) from the School of Computing, MS candidate Yubin Choi from the School of Electrical Engineering, and Dr. Meng Xia (post-doctoral associate in the School of Computing, currently a post-doctoral associate at Carnegie Mellon University) received a best paper award for their paper, “Mobile-Friendly Content Design for MOOCs: Challenges, Requirements, and Design Opportunities”.
The study analyzed the difficulties experienced by learners watching video-based educational content in a mobile environment and suggests guidelines for solutions. The research team analyzed 134 survey responses and 21 interviews, and revealed that texts that are too small or overcrowded are what mainly brings down the legibility of video contents. Additionally, lighting, noise, and surrounding environments that change frequently are also important factors that may disturb a learning experience.
Based on these findings, the team analyzed the aptness of 41,722 frames from 101 video lectures for mobile environments, and confirmed that they generally show low levels of adequacy. For instance, in the case of text sizes, only 24.5% of the frames were shown to be adequate for learning in mobile environments. To overcome this issue, the research team suggested a guideline that may improve the legibility of video contents and help overcome the difficulties arising from mobile learning environments.
The importance of and dependency on video-based learning continue to rise, especially in the wake of the pandemic, and it is meaningful that this research suggested a means to analyze and tackle the difficulties of users that learn from the small screens of mobile devices. Furthermore, the paper also suggested technology that can solve problems related to video-based learning through human-AI collaborations, enhancing existing video lectures and improving learning experiences. This technology can be applied to various video-based platforms and content creation.
Meanwhile, a research team composed of Ph.D. candidate Tae Soo Kim (first author), MS candidate DaEun Choi, and Ph.D. candidate Yoonseo Choi from the School of Computing received an honorable mention award for their paper, “Stylette: styling the Web with Natural Language”.
The research team developed a novel interface technology that allows nonexperts who are unfamiliar with technical jargon to edit website features through speech. People often find it difficult to use or find the information they need from various websites due to accessibility issues, device-related constraints, inconvenient design, style preferences, etc. However, it is not easy for laymen to edit website features without expertise in programming or design, and most end up just putting up with the inconveniences. But what if the system could read the intentions of its users from their everyday language like “emphasize this part a little more”, or “I want a more modern design”, and edit the features automatically?
Based on this question, Professor Kim’s research team developed ‘Stylette’, a system in which AI analyses its users’ speech expressed in their natural language and automatically recommends a new style that best fits their intentions. The research team created a new system by putting together language AI, visual AI, and user interface technologies. On the linguistic side, a large-scale language model AI converts the intentions of the users expressed through their everyday language into adequate style elements. On the visual side, computer vision AI compares 1.7 million existing web design features and recommends a style adequate for the current website. In an experiment where 40 nonexperts were asked to edit a website design, the subjects that used this system showed double the success rate in a time span that was 35% shorter compared to the control group.
It is meaningful that this research proposed a practical case in which AI technology constructs intuitive interactions with users. The developed technology can be applied to existing design applications and web browsers in a plug-in format, and can be utilized to improve websites or for advertisements by collecting the natural intention data of users on a large scale.
2022.06.13 View 4573 -
 Professor Iickho Song Publishes a Book on Probability and Random Variables in English
Professor Iickho Song from the School of Electrical Engineering has published a book on probability and random variables in English. This is the translated version of his book in Korean ‘Theory of Random Variables’, which was selected as an Excellent Book of Basic Sciences by the National Academy of Sciences and the Ministry of Education in 2020.
The book discusses diverse concepts, notions, and applications concerning probability and random variables, explaining basic concepts and results in a clearer and more complete manner.
Readers will also find unique results on the explicit general formula of joint moments and the expected values of nonlinear functions for normal random vectors. In addition, interesting applications for the step and impulse functions in discussions on random vectors are presented. Thanks to a wealth of examples and a total of 330 practice problems of varying difficulty, readers will have the opportunity to significantly expand their knowledge and skills. The book includes an extensive index, allowing readers to quickly and easily find what they are looking for. It also offers a valuable reference guide for experienced scholars and professionals, helping them review and refine their expertise.
Link: https://link.springer.com/book/10.1007/978-3-030-97679-8
2022.06.13 View 2489
Professor Iickho Song Publishes a Book on Probability and Random Variables in English
Professor Iickho Song from the School of Electrical Engineering has published a book on probability and random variables in English. This is the translated version of his book in Korean ‘Theory of Random Variables’, which was selected as an Excellent Book of Basic Sciences by the National Academy of Sciences and the Ministry of Education in 2020.
The book discusses diverse concepts, notions, and applications concerning probability and random variables, explaining basic concepts and results in a clearer and more complete manner.
Readers will also find unique results on the explicit general formula of joint moments and the expected values of nonlinear functions for normal random vectors. In addition, interesting applications for the step and impulse functions in discussions on random vectors are presented. Thanks to a wealth of examples and a total of 330 practice problems of varying difficulty, readers will have the opportunity to significantly expand their knowledge and skills. The book includes an extensive index, allowing readers to quickly and easily find what they are looking for. It also offers a valuable reference guide for experienced scholars and professionals, helping them review and refine their expertise.
Link: https://link.springer.com/book/10.1007/978-3-030-97679-8
2022.06.13 View 2489 -
 Professor Sang Kil Cha Receives IEEE Test-of-Time Award
Professor Sang Kil Cha from the Graduate School of Information Security (GSIS) in the School of Computing received the Test-of-Time Award from IEEE Security & Privacy, a top conference in the field of information security.
The Test-of-Time Award recognizes the research papers that have influenced the field of information security the most over the past decade. Three papers were selected this year, and Professor Cha is the first Korean winner of the award.
The paper by Professor Cha was published in 2012 under the title, “Unleashing Mayhem on Binary Code”. It was the first to ever suggest an algorithm that automatically finds bugs in binary code and creates exploits that links them to an attack code.
The developed algorithm is a core technique used for world-class cyber security hacking competitions like the Cyber Grand Challenge, an AI hacking contest.
Starting with this research, Professor Cha has carried out various studies to develop technologies that can find bugs and vulnerabilities through binary analyses, and is currently developing B2R2, a Korean platform that can analyze various binary codes.
2022.06.13 View 3037
Professor Sang Kil Cha Receives IEEE Test-of-Time Award
Professor Sang Kil Cha from the Graduate School of Information Security (GSIS) in the School of Computing received the Test-of-Time Award from IEEE Security & Privacy, a top conference in the field of information security.
The Test-of-Time Award recognizes the research papers that have influenced the field of information security the most over the past decade. Three papers were selected this year, and Professor Cha is the first Korean winner of the award.
The paper by Professor Cha was published in 2012 under the title, “Unleashing Mayhem on Binary Code”. It was the first to ever suggest an algorithm that automatically finds bugs in binary code and creates exploits that links them to an attack code.
The developed algorithm is a core technique used for world-class cyber security hacking competitions like the Cyber Grand Challenge, an AI hacking contest.
Starting with this research, Professor Cha has carried out various studies to develop technologies that can find bugs and vulnerabilities through binary analyses, and is currently developing B2R2, a Korean platform that can analyze various binary codes.
2022.06.13 View 3037 -
 Professor Jae-Woong Jeong Receives Hyonwoo KAIST Academic Award
Professor Jae-Woong Jeong from the School of Electrical Engineering was selected for the Hyonwoo KAIST Academic Award, funded by the HyonWoo Cultural Foundation (Chairman Soo-il Kwak, honorary professor at Seoul National University Business School).
The Hyonwoo KAIST Academic Award, presented for the first time in 2021, is an award newly founded by the donations of Chairman Soo-il Kwak of the HyonWoo Cultural Foundation, who aims to reward excellent KAIST scholars who have made outstanding academic achievements.
Every year, through the strict evaluations of the selection committee of the HyonWoo Cultural Foundation and the faculty reward recommendation board, KAIST will choose one faculty member that may represent the school with their excellent academic achievement, and reward them with a plaque and 100 million won.
Professor Jae-Woong Jeong, the winner of this year’s award, developed the first IoT-based wireless remote brain neural network control system to overcome brain diseases, and has been leading the field. The research was published in 2021 in Nature Biomedical Engineering, one of world’s best scientific journals, and has been recognized as a novel technology that suggested a new vision for the automation of brain research and disease treatment. This study, led by Professor Jeong’s research team, was part of the KAIST College of Engineering Global Initiative Interdisciplinary Research Project, and was jointly studied by Washington University School of Medicine through an international research collaboration. The technology was introduced more than 60 times through both domestic and international media, including Medical Xpress, MBC News, and Maeil Business News.
Professor Jeong has also developed a wirelessly chargeable soft machine for brain transplants, and the results were published in Nature Communications. He thereby opened a new paradigm for implantable semi-permanent devices for transplants, and is making unprecedented research achievements.
2022.06.13 View 4095
Professor Jae-Woong Jeong Receives Hyonwoo KAIST Academic Award
Professor Jae-Woong Jeong from the School of Electrical Engineering was selected for the Hyonwoo KAIST Academic Award, funded by the HyonWoo Cultural Foundation (Chairman Soo-il Kwak, honorary professor at Seoul National University Business School).
The Hyonwoo KAIST Academic Award, presented for the first time in 2021, is an award newly founded by the donations of Chairman Soo-il Kwak of the HyonWoo Cultural Foundation, who aims to reward excellent KAIST scholars who have made outstanding academic achievements.
Every year, through the strict evaluations of the selection committee of the HyonWoo Cultural Foundation and the faculty reward recommendation board, KAIST will choose one faculty member that may represent the school with their excellent academic achievement, and reward them with a plaque and 100 million won.
Professor Jae-Woong Jeong, the winner of this year’s award, developed the first IoT-based wireless remote brain neural network control system to overcome brain diseases, and has been leading the field. The research was published in 2021 in Nature Biomedical Engineering, one of world’s best scientific journals, and has been recognized as a novel technology that suggested a new vision for the automation of brain research and disease treatment. This study, led by Professor Jeong’s research team, was part of the KAIST College of Engineering Global Initiative Interdisciplinary Research Project, and was jointly studied by Washington University School of Medicine through an international research collaboration. The technology was introduced more than 60 times through both domestic and international media, including Medical Xpress, MBC News, and Maeil Business News.
Professor Jeong has also developed a wirelessly chargeable soft machine for brain transplants, and the results were published in Nature Communications. He thereby opened a new paradigm for implantable semi-permanent devices for transplants, and is making unprecedented research achievements.
2022.06.13 View 4095 -
 2022 KAIST Research Day Recognizes 10 Outstanding Researches
On May 31, the 2022 KAIST Research Day was held at the Jeong Geun-mo Conference Hall at KAIST’s main campus.
Since 2016, Research Day has been a yearly festival for researchers at KAIST. By introducing major research achievements and providing opportunities for information exchanges in R&D, it aims to create an atmosphere for mutual cooperation and communication amongst researchers, thereby vitalizing interdisciplinary research.
At this year’s event, 10 faculty members and their representative research achievements were rewarded. As the winner of the Grand Prize for Research, Professor Il-Doo Kim (Department of Materials Science and Engineering) gave a lecture on his topic, “Ultrasensitive flexible chemical sensor”.
With rising attention being given to environmental safety and healthcare, the importance of mobile sensors for trace amounts of molecules that can quickly raise hazard signals and allow early diagnosis from breath analysis have been brought to light. The lecture will break down ultrasensitive chemical sensor development cases, and introduced how gas sensor technologies developed at KAIST in particular are being applied at semiconductor and display fabrication plants for environmental and safety analyses and hazard prevention.
Professor Il-Doo Kim is a recognized researcher for his inventive achievements in the fields of respiratory gas sensor technology for early disease monitoring, and ordered nanofiber membranes for antiviral and fine dust filters.
Professor Kim has so far published 343 international research papers, received 56 journal covers, been awarded 230 domestic and international patents, and completed 12 technology transfers. He has also received a presidential award on the 51st invention day in 2016, Scientist of the Year Award selected by reporters in 2019, and has been named a fellow in the engineering division of the Korean Academy of Science and Technology in 2022.
Professor Kwang-Hyun Cho at the Department of Bio and Brain Engineering and Professor Doh Chang Lee at the Department of Chemical and Biomolecular Engineering were each awarded the Research Award, and Professor Dongsoo Han at the School of Computing received the Innovation Award.
Professors Buhm Soon Park at the Graduate School of Science and Technology Policy, Changick Kim at the School of Electrical Engineering and Hyun Jung Cho at the School of Digital Humanities and Computational Social Sciences received the Interdisciplinary Research Award as a team.
The passion and experiences of the awardees are to be introduced to undergraduate and graduate students as well as fellow researchers through a pre-recorded video lecture, while the lecture of the winner of the grand prize will be delivered on site.
Meanwhile, the top ten R&D achievements of KAIST selected excellent research outcomes from the natural and biological sciences including “Polariton-based PT symmetry laser that turns loss into gain” (Professor Yong-Hoon Cho at the Department of Physics), “Solution to the Riemann Problem including weak shock waves in 1-dimensional space” (Professor Moon-Jin Kang at the Department of Mathematical Sciences), and “Characterization of immune reaction in COVID-19 patients” (Professor Eui-Cheol Shin at the Graduate School of Medical Science and Engineering.)
Awardees from the engineering field included “Fluid surface stabilization technology using plasma jet” (Professor Wonho Choe at the Department of Nuclear and Quantum Engineering, “Visual recognition technology using event-based cameras” (Professor Kuk-Jin Yoon at theDepartment of Mechanical Engineering, “Artificial sensory system development through neural signal mimicry” (Professor Seongjun Park at the Department of Bio and Brain Engineering, “Mott transition material-based ultrahigh speed, low-power, and deformation-resistant true random number generator” (Professor Kyung Min Kim at the Department of Materials Science and Engineering, “Investment service design based on Aline: ESG” (Professor Sangsu Lee at the Department of Industrial Design), “Structural color printing technology without chemical colorings” (Professor Shin-Hyun Kim at the Department of Chemical and Biomolecular Engineering), and “Differentiable transient optical transfer simulation” (Professor Minhyuk Kim at the School of Computing)
To encourage the participation of members of KAIST, all parts of the ceremony will be broadcast live through YouTube in both English and Korean.” He added, “Offline audiences will congratulate the awardees at Fusion Hall in the KI Building and gain research ideas.”
2022.06.10 View 4810
2022 KAIST Research Day Recognizes 10 Outstanding Researches
On May 31, the 2022 KAIST Research Day was held at the Jeong Geun-mo Conference Hall at KAIST’s main campus.
Since 2016, Research Day has been a yearly festival for researchers at KAIST. By introducing major research achievements and providing opportunities for information exchanges in R&D, it aims to create an atmosphere for mutual cooperation and communication amongst researchers, thereby vitalizing interdisciplinary research.
At this year’s event, 10 faculty members and their representative research achievements were rewarded. As the winner of the Grand Prize for Research, Professor Il-Doo Kim (Department of Materials Science and Engineering) gave a lecture on his topic, “Ultrasensitive flexible chemical sensor”.
With rising attention being given to environmental safety and healthcare, the importance of mobile sensors for trace amounts of molecules that can quickly raise hazard signals and allow early diagnosis from breath analysis have been brought to light. The lecture will break down ultrasensitive chemical sensor development cases, and introduced how gas sensor technologies developed at KAIST in particular are being applied at semiconductor and display fabrication plants for environmental and safety analyses and hazard prevention.
Professor Il-Doo Kim is a recognized researcher for his inventive achievements in the fields of respiratory gas sensor technology for early disease monitoring, and ordered nanofiber membranes for antiviral and fine dust filters.
Professor Kim has so far published 343 international research papers, received 56 journal covers, been awarded 230 domestic and international patents, and completed 12 technology transfers. He has also received a presidential award on the 51st invention day in 2016, Scientist of the Year Award selected by reporters in 2019, and has been named a fellow in the engineering division of the Korean Academy of Science and Technology in 2022.
Professor Kwang-Hyun Cho at the Department of Bio and Brain Engineering and Professor Doh Chang Lee at the Department of Chemical and Biomolecular Engineering were each awarded the Research Award, and Professor Dongsoo Han at the School of Computing received the Innovation Award.
Professors Buhm Soon Park at the Graduate School of Science and Technology Policy, Changick Kim at the School of Electrical Engineering and Hyun Jung Cho at the School of Digital Humanities and Computational Social Sciences received the Interdisciplinary Research Award as a team.
The passion and experiences of the awardees are to be introduced to undergraduate and graduate students as well as fellow researchers through a pre-recorded video lecture, while the lecture of the winner of the grand prize will be delivered on site.
Meanwhile, the top ten R&D achievements of KAIST selected excellent research outcomes from the natural and biological sciences including “Polariton-based PT symmetry laser that turns loss into gain” (Professor Yong-Hoon Cho at the Department of Physics), “Solution to the Riemann Problem including weak shock waves in 1-dimensional space” (Professor Moon-Jin Kang at the Department of Mathematical Sciences), and “Characterization of immune reaction in COVID-19 patients” (Professor Eui-Cheol Shin at the Graduate School of Medical Science and Engineering.)
Awardees from the engineering field included “Fluid surface stabilization technology using plasma jet” (Professor Wonho Choe at the Department of Nuclear and Quantum Engineering, “Visual recognition technology using event-based cameras” (Professor Kuk-Jin Yoon at theDepartment of Mechanical Engineering, “Artificial sensory system development through neural signal mimicry” (Professor Seongjun Park at the Department of Bio and Brain Engineering, “Mott transition material-based ultrahigh speed, low-power, and deformation-resistant true random number generator” (Professor Kyung Min Kim at the Department of Materials Science and Engineering, “Investment service design based on Aline: ESG” (Professor Sangsu Lee at the Department of Industrial Design), “Structural color printing technology without chemical colorings” (Professor Shin-Hyun Kim at the Department of Chemical and Biomolecular Engineering), and “Differentiable transient optical transfer simulation” (Professor Minhyuk Kim at the School of Computing)
To encourage the participation of members of KAIST, all parts of the ceremony will be broadcast live through YouTube in both English and Korean.” He added, “Offline audiences will congratulate the awardees at Fusion Hall in the KI Building and gain research ideas.”
2022.06.10 View 4810 -
 Game Design Guide Book for Middle-Aged and Older Adult Players Helps Rewrite Gaming Culture
The online book ‘Game Design Guide for Adults in Their 50s and Older’ helps to increase accessibility for adult gamers
A KAIST multi-disciplinary research team published a game guide to respond to the new demands of senior gamers and expand the gaming market. The guide will be helpful for designing interfaces fit for senior groups as a way to minimize the cognitive burdens related to aging. It also helps readers understand older users’ cognitive abilities and socioemotional characteristics.
“This guide analyzed the game experience of players in their 50s and older and converted it into a game design element that can be easily referred to by game developers and designers,” explained Professor Young Im Do from the Graduate School of Culture Technology who led the research.
The gaming industry is paying attention to the emerging trend of ‘active aging’ and senior gamers. According to the National Purchase Diary Panel Inc., game play time increased significantly in the 45-64 age group compared to other age groups during the pandemic. Despite the growing number of senior gamers, it is still difficult for older novice players to start video games because most commercial games focus on younger players. For example, older players can feel frustrated if the game requires fast reflexes and accurate timing. Font sizes and objects that are too small as well as interfaces that are too complicated can be challenging for senior gamers.
The research team presents how to handle these difficulties in game design considering the visual-motor coordination of people in age groups ranging from their 20s to 80s. It also proposes various game elements such as audio-visual elements, cognitive and motor elements, game rules, stories and characters, social aspects, in-app purchases, and advertisements for senior groups. The guide also proposes a game service model and introduces examples of game prototypes that apply supportive technology.
For this guide, the researchers operated the “International Game Living Lab”, which is an open space for creating novel and innovative solutions by converging IT technology into daily life. In the lab, ordinary citizens, research institutes, companies, and local communities formed a cooperative network and actively participated in experiments, education, and discussions for finding solutions over three years.
Researchers in multi-disciplinary fields, including computer science, psychology, game design, and gerontechnology, covered various methodologies to understand the game experience of adults in their 50s and older. In order to profile players of this age group, three different approaches were performed: visual-motor coordination experiments, an EEG (Electroencephalogram) test, and a gameplay workshop. Then, they converted the results into practical knowledge that can be used in the gaming industry.
Professor Kyung Myun Lee from the School of Digital Humanities and Computational Social Sciences at KAIST, Professor Byungjoo Shin from Yonsei University, CEO Junyoung Shin of CareU, and CEO Minseok Doh of Heartverse participated in this online book which is available to the public at https://wikidocs.net/book/7356.
2022.06.10 View 3619
Game Design Guide Book for Middle-Aged and Older Adult Players Helps Rewrite Gaming Culture
The online book ‘Game Design Guide for Adults in Their 50s and Older’ helps to increase accessibility for adult gamers
A KAIST multi-disciplinary research team published a game guide to respond to the new demands of senior gamers and expand the gaming market. The guide will be helpful for designing interfaces fit for senior groups as a way to minimize the cognitive burdens related to aging. It also helps readers understand older users’ cognitive abilities and socioemotional characteristics.
“This guide analyzed the game experience of players in their 50s and older and converted it into a game design element that can be easily referred to by game developers and designers,” explained Professor Young Im Do from the Graduate School of Culture Technology who led the research.
The gaming industry is paying attention to the emerging trend of ‘active aging’ and senior gamers. According to the National Purchase Diary Panel Inc., game play time increased significantly in the 45-64 age group compared to other age groups during the pandemic. Despite the growing number of senior gamers, it is still difficult for older novice players to start video games because most commercial games focus on younger players. For example, older players can feel frustrated if the game requires fast reflexes and accurate timing. Font sizes and objects that are too small as well as interfaces that are too complicated can be challenging for senior gamers.
The research team presents how to handle these difficulties in game design considering the visual-motor coordination of people in age groups ranging from their 20s to 80s. It also proposes various game elements such as audio-visual elements, cognitive and motor elements, game rules, stories and characters, social aspects, in-app purchases, and advertisements for senior groups. The guide also proposes a game service model and introduces examples of game prototypes that apply supportive technology.
For this guide, the researchers operated the “International Game Living Lab”, which is an open space for creating novel and innovative solutions by converging IT technology into daily life. In the lab, ordinary citizens, research institutes, companies, and local communities formed a cooperative network and actively participated in experiments, education, and discussions for finding solutions over three years.
Researchers in multi-disciplinary fields, including computer science, psychology, game design, and gerontechnology, covered various methodologies to understand the game experience of adults in their 50s and older. In order to profile players of this age group, three different approaches were performed: visual-motor coordination experiments, an EEG (Electroencephalogram) test, and a gameplay workshop. Then, they converted the results into practical knowledge that can be used in the gaming industry.
Professor Kyung Myun Lee from the School of Digital Humanities and Computational Social Sciences at KAIST, Professor Byungjoo Shin from Yonsei University, CEO Junyoung Shin of CareU, and CEO Minseok Doh of Heartverse participated in this online book which is available to the public at https://wikidocs.net/book/7356.
2022.06.10 View 3619 -
 Now You Can See Floral Scents!
Optical interferometry visualizes how often lilies emit volatile organic compounds
Have you ever thought about when flowers emit their scents?
KAIST mechanical engineers and biological scientists directly visualized how often a lily releases a floral scent using a laser interferometry method. These measurement results can provide new insights for understanding and further exploring the biosynthesis and emission mechanisms of floral volatiles.
Why is it important to know this? It is well known that the fragrance of flowers affects their interactions with pollinators, microorganisms, and florivores. For instance, many flowering plants can tune their scent emission rates when pollinators are active for pollination. Petunias and the wild tobacco Nicotiana attenuata emit floral scents at night to attract night-active pollinators. Thus, visualizing scent emissions can help us understand the ecological evolution of plant-pollinator interactions.
Many groups have been trying to develop methods for scent analysis. Mass spectrometry has been one widely used method for investigating the fragrance of flowers. Although mass spectrometry reveals the quality and quantity of floral scents, it is impossible to directly measure the releasing frequency. A laser-based gas detection system and a smartphone-based detection system using chemo-responsive dyes have also been used to measure volatile organic compounds (VOCs) in real-time, but it is still hard to measure the time-dependent emission rate of floral scents.
However, the KAIST research team co-led by Professor Hyoungsoo Kim from the Department of Mechanical Engineering and Professor Sang-Gyu Kim from the Department of Biological Sciences measured a refractive index difference between the vapor of the VOCs of lilies and the air to measure the emission frequency. The floral scent vapor was detected and the refractive index of air was 1.0 while that of the major floral scent of a linalool lily was 1.46.
Professor Hyoungsoo Kim said, “We expect this technology to be further applicable to various industrial sectors such as developing it to detect hazardous substances in a space.” The research team also plans to identify the DNA mechanism that controls floral scent secretion.
The current work entitled “Real-time visualization of scent accumulation reveals the frequency of floral scent emissions” was published in ‘Frontiers in Plant Science’ on April 18, 2022. (https://doi.org/10.3389/fpls.2022.835305).
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF-2021R1A2C2007835), the Rural Development Administration (PJ016403), and the KAIST-funded Global Singularity Research PREP-Program.
-Publication:H. Kim, G. Lee, J. Song, and S.-G. Kim, "Real-time visualization of scent accumulation reveals the frequency of floral scent emissions," Frontiers in Plant Science 18, 835305 (2022) (https://doi.org/10.3389/fpls.2022.835305)
-Profile:Professor Hyoungsoo Kimhttp://fil.kaist.ac.kr
@MadeInH on TwitterDepartment of Mechanical EngineeringKAIST
Professor Sang-Gyu Kimhttps://sites.google.com/view/kimlab/home Department of Biological SciencesKAIST
2022.05.25 View 5393
Now You Can See Floral Scents!
Optical interferometry visualizes how often lilies emit volatile organic compounds
Have you ever thought about when flowers emit their scents?
KAIST mechanical engineers and biological scientists directly visualized how often a lily releases a floral scent using a laser interferometry method. These measurement results can provide new insights for understanding and further exploring the biosynthesis and emission mechanisms of floral volatiles.
Why is it important to know this? It is well known that the fragrance of flowers affects their interactions with pollinators, microorganisms, and florivores. For instance, many flowering plants can tune their scent emission rates when pollinators are active for pollination. Petunias and the wild tobacco Nicotiana attenuata emit floral scents at night to attract night-active pollinators. Thus, visualizing scent emissions can help us understand the ecological evolution of plant-pollinator interactions.
Many groups have been trying to develop methods for scent analysis. Mass spectrometry has been one widely used method for investigating the fragrance of flowers. Although mass spectrometry reveals the quality and quantity of floral scents, it is impossible to directly measure the releasing frequency. A laser-based gas detection system and a smartphone-based detection system using chemo-responsive dyes have also been used to measure volatile organic compounds (VOCs) in real-time, but it is still hard to measure the time-dependent emission rate of floral scents.
However, the KAIST research team co-led by Professor Hyoungsoo Kim from the Department of Mechanical Engineering and Professor Sang-Gyu Kim from the Department of Biological Sciences measured a refractive index difference between the vapor of the VOCs of lilies and the air to measure the emission frequency. The floral scent vapor was detected and the refractive index of air was 1.0 while that of the major floral scent of a linalool lily was 1.46.
Professor Hyoungsoo Kim said, “We expect this technology to be further applicable to various industrial sectors such as developing it to detect hazardous substances in a space.” The research team also plans to identify the DNA mechanism that controls floral scent secretion.
The current work entitled “Real-time visualization of scent accumulation reveals the frequency of floral scent emissions” was published in ‘Frontiers in Plant Science’ on April 18, 2022. (https://doi.org/10.3389/fpls.2022.835305).
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF-2021R1A2C2007835), the Rural Development Administration (PJ016403), and the KAIST-funded Global Singularity Research PREP-Program.
-Publication:H. Kim, G. Lee, J. Song, and S.-G. Kim, "Real-time visualization of scent accumulation reveals the frequency of floral scent emissions," Frontiers in Plant Science 18, 835305 (2022) (https://doi.org/10.3389/fpls.2022.835305)
-Profile:Professor Hyoungsoo Kimhttp://fil.kaist.ac.kr
@MadeInH on TwitterDepartment of Mechanical EngineeringKAIST
Professor Sang-Gyu Kimhttps://sites.google.com/view/kimlab/home Department of Biological SciencesKAIST
2022.05.25 View 5393