College+of+Engineering
-
 KAIST researchers find sleep delays more prevalent in countries of particular culture than others
Sleep has a huge impact on health, well-being and productivity, but how long and how well people sleep these days has not been accurately reported. Previous research on how much and how well we sleep has mostly relied on self-reports or was confined within the data from the unnatural environments of the sleep laboratories.
So, the questions remained: Is the amount and quality of sleep purely a personal choice? Could they be independent from social factors such as culture and geography?
< From left to right, Sungkyu Park of Kangwon National University, South Korea; Assem Zhunis of KAIST and IBS, South Korea; Marios Constantinides of Nokia Bell Labs, UK; Luca Maria Aiello of the IT University of Copenhagen, Denmark; Daniele Quercia of Nokia Bell Labs and King's College London, UK; and Meeyoung Cha of IBS and KAIST, South Korea >
A new study led by researchers at Korea Advanced Institute of Science and Technology (KAIST) and Nokia Bell Labs in the United Kingdom investigated the cultural and individual factors that influence sleep. In contrast to previous studies that relied on surveys or controlled experiments at labs, the team used commercially available smartwatches for extensive data collection, analyzing 52 million logs collected over a four-year period from 30,082 individuals in 11 countries. These people wore Nokia smartwatches, which allowed the team to investigate country-specific sleep patterns based on the digital logs from the devices.
< Figure comparing survey and smartwatch logs on average sleep-time, wake-time, and sleep durations. Digital logs consistently recorded delayed hours of wake- and sleep-time, resulting in shorter sleep durations. >
Digital logs collected from the smartwatches revealed discrepancies in wake-up times and sleep-times, sometimes by tens of minutes to an hour, from the data previously collected from self-report assessments. The average sleep-time overall was calculated to be around midnight, and the average wake-up time was 7:42 AM. The team discovered, however, that individuals' sleep is heavily linked to their geographical location and cultural factors. While wake-up times were similar, sleep-time varied by country. Individuals in higher GDP countries had more records of delayed bedtime. Those in collectivist culture, compared to individualist culture, also showed more records of delayed bedtime. Among the studied countries, Japan had the shortest total sleep duration, averaging a duration of under 7 hours, while Finland had the longest, averaging 8 hours.
Researchers calculated essential sleep metrics used in clinical studies, such as sleep efficiency, sleep duration, and overslept hours on weekends, to analyze the extensive sleep patterns. Using Principal Component Analysis (PCA), they further condensed these metrics into two major sleep dimensions representing sleep quality and quantity. A cross-country comparison revealed that societal factors account for 55% of the variation in sleep quality and 63% of the variation in sleep quantity.
Countries with a higher individualism index (IDV), which placed greater emphasis on individual achievements and relationships, had significantly longer sleep durations, which could be attributed to such societies having a norm of going to bed early. Spain and Japan, on the other hand, had the bedtime scheduled at the latest hours despite having the highest collectivism scores (low IDV). The study also discovered a moderate relationship between a higher uncertainty avoidance index (UAI), which measures implementation of general laws and regulation in daily lives of regular citizens, and better sleep quality.
Researchers also investigated how physical activity can affect sleep quantity and quality to see if individuals can counterbalance cultural influences through personal interventions. They discovered that increasing daily activity can improve sleep quality in terms of shortened time needed in falling asleep and waking up. Individuals who exercise more, however, did not sleep longer. The effect of exercise differed by country, with more pronounced effects observed in some countries, such as the United States and Finland. Interestingly, in Japan, no obvious effect of exercise could be observed. These findings suggest that the relationship between daily activity and sleep may differ by country and that different exercise regimens may be more effective in different cultures.
This research published on the Scientific Reports by the international journal, Nature, sheds light on the influence of social factors on sleep. (Paper Title "Social dimensions impact individual sleep quantity and quality" Article number: 9681)
One of the co-authors, Daniele Quercia, commented: “Excessive work schedules, long working hours, and late bedtime in high-income countries and social engagement due to high collectivism may cause bedtimes to be delayed.”
Commenting on the research, the first author Shaun Sungkyu Park said, "While it is intriguing to see that a society can play a role in determining the quantity and quality of an individual's sleep with large-scale data, the significance of this study is that it quantitatively shows that even within the same culture (country), individual efforts such as daily exercise can have a positive impact on sleep quantity and quality."
"Sleep not only has a great impact on one’s well-being but it is also known to be associated with health issues such as obesity and dementia," said the lead author, Meeyoung Cha. "In order to ensure adequate sleep and improve sleep quality in an aging society, not only individual efforts but also a social support must be provided to work together," she said. The research team will contribute to the development of the high-tech sleep industry by making a code that easily calculates the sleep indicators developed in this study available free of charge, as well as providing the benchmark data for various types of sleep research to follow.
2023.07.07 View 3410
KAIST researchers find sleep delays more prevalent in countries of particular culture than others
Sleep has a huge impact on health, well-being and productivity, but how long and how well people sleep these days has not been accurately reported. Previous research on how much and how well we sleep has mostly relied on self-reports or was confined within the data from the unnatural environments of the sleep laboratories.
So, the questions remained: Is the amount and quality of sleep purely a personal choice? Could they be independent from social factors such as culture and geography?
< From left to right, Sungkyu Park of Kangwon National University, South Korea; Assem Zhunis of KAIST and IBS, South Korea; Marios Constantinides of Nokia Bell Labs, UK; Luca Maria Aiello of the IT University of Copenhagen, Denmark; Daniele Quercia of Nokia Bell Labs and King's College London, UK; and Meeyoung Cha of IBS and KAIST, South Korea >
A new study led by researchers at Korea Advanced Institute of Science and Technology (KAIST) and Nokia Bell Labs in the United Kingdom investigated the cultural and individual factors that influence sleep. In contrast to previous studies that relied on surveys or controlled experiments at labs, the team used commercially available smartwatches for extensive data collection, analyzing 52 million logs collected over a four-year period from 30,082 individuals in 11 countries. These people wore Nokia smartwatches, which allowed the team to investigate country-specific sleep patterns based on the digital logs from the devices.
< Figure comparing survey and smartwatch logs on average sleep-time, wake-time, and sleep durations. Digital logs consistently recorded delayed hours of wake- and sleep-time, resulting in shorter sleep durations. >
Digital logs collected from the smartwatches revealed discrepancies in wake-up times and sleep-times, sometimes by tens of minutes to an hour, from the data previously collected from self-report assessments. The average sleep-time overall was calculated to be around midnight, and the average wake-up time was 7:42 AM. The team discovered, however, that individuals' sleep is heavily linked to their geographical location and cultural factors. While wake-up times were similar, sleep-time varied by country. Individuals in higher GDP countries had more records of delayed bedtime. Those in collectivist culture, compared to individualist culture, also showed more records of delayed bedtime. Among the studied countries, Japan had the shortest total sleep duration, averaging a duration of under 7 hours, while Finland had the longest, averaging 8 hours.
Researchers calculated essential sleep metrics used in clinical studies, such as sleep efficiency, sleep duration, and overslept hours on weekends, to analyze the extensive sleep patterns. Using Principal Component Analysis (PCA), they further condensed these metrics into two major sleep dimensions representing sleep quality and quantity. A cross-country comparison revealed that societal factors account for 55% of the variation in sleep quality and 63% of the variation in sleep quantity.
Countries with a higher individualism index (IDV), which placed greater emphasis on individual achievements and relationships, had significantly longer sleep durations, which could be attributed to such societies having a norm of going to bed early. Spain and Japan, on the other hand, had the bedtime scheduled at the latest hours despite having the highest collectivism scores (low IDV). The study also discovered a moderate relationship between a higher uncertainty avoidance index (UAI), which measures implementation of general laws and regulation in daily lives of regular citizens, and better sleep quality.
Researchers also investigated how physical activity can affect sleep quantity and quality to see if individuals can counterbalance cultural influences through personal interventions. They discovered that increasing daily activity can improve sleep quality in terms of shortened time needed in falling asleep and waking up. Individuals who exercise more, however, did not sleep longer. The effect of exercise differed by country, with more pronounced effects observed in some countries, such as the United States and Finland. Interestingly, in Japan, no obvious effect of exercise could be observed. These findings suggest that the relationship between daily activity and sleep may differ by country and that different exercise regimens may be more effective in different cultures.
This research published on the Scientific Reports by the international journal, Nature, sheds light on the influence of social factors on sleep. (Paper Title "Social dimensions impact individual sleep quantity and quality" Article number: 9681)
One of the co-authors, Daniele Quercia, commented: “Excessive work schedules, long working hours, and late bedtime in high-income countries and social engagement due to high collectivism may cause bedtimes to be delayed.”
Commenting on the research, the first author Shaun Sungkyu Park said, "While it is intriguing to see that a society can play a role in determining the quantity and quality of an individual's sleep with large-scale data, the significance of this study is that it quantitatively shows that even within the same culture (country), individual efforts such as daily exercise can have a positive impact on sleep quantity and quality."
"Sleep not only has a great impact on one’s well-being but it is also known to be associated with health issues such as obesity and dementia," said the lead author, Meeyoung Cha. "In order to ensure adequate sleep and improve sleep quality in an aging society, not only individual efforts but also a social support must be provided to work together," she said. The research team will contribute to the development of the high-tech sleep industry by making a code that easily calculates the sleep indicators developed in this study available free of charge, as well as providing the benchmark data for various types of sleep research to follow.
2023.07.07 View 3410 -
 KAIST Civil Engineering Students named Runner-up at the 2023 ULI Hines Student Competition - Asia Pacific
A team of five students from the Korea Advanced Institute of Science and Technology (KAIST) were awarded second place in a premier urban design student competition hosted by the Urban Land Institute and Hines, 2023 ULI Hines Student Competition - Asia Pacific.
The competition, which was held for the first time in the Asia-Pacific region, is an internationally recognized event which typically attract hundreds of applicants.
Jonah Remigio, Sojung Noh, Estefania Rodriguez, Jihyun Kang, and Ayantu Teshome, who joined forces under the name of “Team Hashtag Development”, were supported by faculty advisors Dr. Albert Han and Dr. Youngchul Kim of the Department of Civil and Environmental Engineering to imagine a more sustainable and enriched way of living in the Jurong district of Singapore.
Their submission, titled “Proposal: The Nest”, analyzed the big data within Singapore, using the data to determine which real estate business strategies would best enhance the quality of living and economy of the region.
Their final design, "The Nest" utilized mixed-use zoning to integrate the site’s scenic waterfront with homes, medical innovation, and sustainable technology, altogether creating a place to innovate, inhabit, and immerse.
< The Nest by Team Hashtag Development (Jonah Remigio, Ayantu Teshome Mossisa, Estefania Ayelen Rodriguez del Puerto, Sojung Noh, Jihyun Kang) ©2023 Urban Land Institute >
Ultimately, the team was recognized for their hard work and determination, imprinting South Korea’s indelible footprint in the arena of international scholastic achievement as they were named to be one of the Finalists on April 13th.
< Members of Team Hashtag Development >
Team Hashtag Development gave a virtual presentation to a jury of six ULI members on April 20th along with the "Team The REAL" from the University of Economics Ho Chi Minh City of Vietnam and "Team Omusubi" from the Waseda University of Japan, the team that submitted the proposal "Jurong Urban Health Campus" which was announced to be the winner on the 31st of May, after the virtual briefing by the top three finalists.
2023.06.26 View 3443
KAIST Civil Engineering Students named Runner-up at the 2023 ULI Hines Student Competition - Asia Pacific
A team of five students from the Korea Advanced Institute of Science and Technology (KAIST) were awarded second place in a premier urban design student competition hosted by the Urban Land Institute and Hines, 2023 ULI Hines Student Competition - Asia Pacific.
The competition, which was held for the first time in the Asia-Pacific region, is an internationally recognized event which typically attract hundreds of applicants.
Jonah Remigio, Sojung Noh, Estefania Rodriguez, Jihyun Kang, and Ayantu Teshome, who joined forces under the name of “Team Hashtag Development”, were supported by faculty advisors Dr. Albert Han and Dr. Youngchul Kim of the Department of Civil and Environmental Engineering to imagine a more sustainable and enriched way of living in the Jurong district of Singapore.
Their submission, titled “Proposal: The Nest”, analyzed the big data within Singapore, using the data to determine which real estate business strategies would best enhance the quality of living and economy of the region.
Their final design, "The Nest" utilized mixed-use zoning to integrate the site’s scenic waterfront with homes, medical innovation, and sustainable technology, altogether creating a place to innovate, inhabit, and immerse.
< The Nest by Team Hashtag Development (Jonah Remigio, Ayantu Teshome Mossisa, Estefania Ayelen Rodriguez del Puerto, Sojung Noh, Jihyun Kang) ©2023 Urban Land Institute >
Ultimately, the team was recognized for their hard work and determination, imprinting South Korea’s indelible footprint in the arena of international scholastic achievement as they were named to be one of the Finalists on April 13th.
< Members of Team Hashtag Development >
Team Hashtag Development gave a virtual presentation to a jury of six ULI members on April 20th along with the "Team The REAL" from the University of Economics Ho Chi Minh City of Vietnam and "Team Omusubi" from the Waseda University of Japan, the team that submitted the proposal "Jurong Urban Health Campus" which was announced to be the winner on the 31st of May, after the virtual briefing by the top three finalists.
2023.06.26 View 3443 -
 A KAIST research team develops a high-performance modular SSD system semiconductor
In recent years, there has been a rise in demand for large amounts of data to train AI models and, thus, data size has become increasingly important over time. Accordingly, solid state drives (SSDs, storage devices that use a semiconductor memory unit), which are core storage devices for data centers and cloud services, have also seen an increase in demand. However, the internal components of higher performing SSDs have become more tightly coupled, and this tightly-coupled structure limits SSD from maximized performance.
On June 15, a KAIST research team led by Professor Dongjun Kim (John Kim) from the School of Electrical Engineering (EE) announced the development of the first SSD system semiconductor structure that can increase the reading/writing performance of next generation SSDs and extend their lifespan through high-performance modular SSD systems.
Professor Kim’s team identified the limitations of the tightly-coupled structures in existing SSD designs and proposed a de-coupled structure that can maximize SSD performance by configuring an internal on-chip network specialized for flash memory. This technique utilizes on-chip network technology, which can freely send packet-based data within the chip and is often used to design non-memory system semiconductors like CPUs and GPUs. Through this, the team developed a ‘modular SSD’, which shows reduced interdependence between front-end and back-end designs, and allows their independent design and assembly.
*on-chip network: a packet-based connection structure for the internal components of system semiconductors like CPUs/GPUs. On-chip networks are one of the most critical design components for high-performing system semiconductors, and their importance grows with the size of the semiconductor chip.
Professor Kim’s team refers to the components nearer to the CPU as the front-end and the parts closer to the flash memory as back-end. They newly constructed an on-chip network specific to flash memory in order to allow data transmission between the back-end’s flash controller, proposing a de-coupled structure that can minimize performance drop.
The SSD can accelerate some functions of the flash translation layer, a critical element to drive the SSD, in order to allow flash memory to actively overcome its limitations. Another advantage of the de-coupled, modular structure is that the flash translation layer is not limited to the characteristics of specific flash memories. Instead, their front-end and back-end designs can be carried out independently. Through this, the team could produce 21-times faster response times compared to existing systems and extend SSD lifespan by 23% by also applying the DDS defect detection technique.
< Figure 1. Schematic diagram of the structure of a high-performance modular SSD system developed by Professor Dong-Jun Kim's team >
This research, conducted by first author and Ph.D. candidate Jiho Kim from the KAIST School of EE and co-author Professor Myoungsoo Jung, was presented on the 19th of June at the 50th IEEE/ACM International Symposium on Computer Architecture, the most prestigious academic conference in the field of computer architecture, held in Orlando, Florida. (Paper Title: Decoupled SSD: Rethinking SSD Architecture through Network-based Flash Controllers)
< Figure 2. Conceptual diagram of hardware acceleration through high-performance modular SSD system >
Professor Dongjun Kim, who led the research, said, “This research is significant in that it identified the structural limitations of existing SSDs, and showed that on-chip network technology based on system memory semiconductors like CPUs can drive the hardware to actively carry out the necessary actions. We expect this to contribute greatly to the next-generation high-performance SSD market.” He added, “The de-coupled architecture is a structure that can actively operate to extend devices’ lifespan. In other words, its significance is not limited to the level of performance and can, therefore, be used for various applications.”
KAIST commented that this research is also meaningful in that the results were reaped through a collaborative study between two world-renowned researchers: Professor Myeongsoo Jung, recognized in the field of computer system storage devices, and Professor Dongjun Kim, a leading researcher in computer architecture and interconnection networks.
This research was funded by the National Research Foundation of Korea, Samsung Electronics, the IC Design Education Center, and Next Generation Semiconductor Technology and Development granted by the Institute of Information & Communications Technology, Planning & Evaluation.
2023.06.23 View 3068
A KAIST research team develops a high-performance modular SSD system semiconductor
In recent years, there has been a rise in demand for large amounts of data to train AI models and, thus, data size has become increasingly important over time. Accordingly, solid state drives (SSDs, storage devices that use a semiconductor memory unit), which are core storage devices for data centers and cloud services, have also seen an increase in demand. However, the internal components of higher performing SSDs have become more tightly coupled, and this tightly-coupled structure limits SSD from maximized performance.
On June 15, a KAIST research team led by Professor Dongjun Kim (John Kim) from the School of Electrical Engineering (EE) announced the development of the first SSD system semiconductor structure that can increase the reading/writing performance of next generation SSDs and extend their lifespan through high-performance modular SSD systems.
Professor Kim’s team identified the limitations of the tightly-coupled structures in existing SSD designs and proposed a de-coupled structure that can maximize SSD performance by configuring an internal on-chip network specialized for flash memory. This technique utilizes on-chip network technology, which can freely send packet-based data within the chip and is often used to design non-memory system semiconductors like CPUs and GPUs. Through this, the team developed a ‘modular SSD’, which shows reduced interdependence between front-end and back-end designs, and allows their independent design and assembly.
*on-chip network: a packet-based connection structure for the internal components of system semiconductors like CPUs/GPUs. On-chip networks are one of the most critical design components for high-performing system semiconductors, and their importance grows with the size of the semiconductor chip.
Professor Kim’s team refers to the components nearer to the CPU as the front-end and the parts closer to the flash memory as back-end. They newly constructed an on-chip network specific to flash memory in order to allow data transmission between the back-end’s flash controller, proposing a de-coupled structure that can minimize performance drop.
The SSD can accelerate some functions of the flash translation layer, a critical element to drive the SSD, in order to allow flash memory to actively overcome its limitations. Another advantage of the de-coupled, modular structure is that the flash translation layer is not limited to the characteristics of specific flash memories. Instead, their front-end and back-end designs can be carried out independently. Through this, the team could produce 21-times faster response times compared to existing systems and extend SSD lifespan by 23% by also applying the DDS defect detection technique.
< Figure 1. Schematic diagram of the structure of a high-performance modular SSD system developed by Professor Dong-Jun Kim's team >
This research, conducted by first author and Ph.D. candidate Jiho Kim from the KAIST School of EE and co-author Professor Myoungsoo Jung, was presented on the 19th of June at the 50th IEEE/ACM International Symposium on Computer Architecture, the most prestigious academic conference in the field of computer architecture, held in Orlando, Florida. (Paper Title: Decoupled SSD: Rethinking SSD Architecture through Network-based Flash Controllers)
< Figure 2. Conceptual diagram of hardware acceleration through high-performance modular SSD system >
Professor Dongjun Kim, who led the research, said, “This research is significant in that it identified the structural limitations of existing SSDs, and showed that on-chip network technology based on system memory semiconductors like CPUs can drive the hardware to actively carry out the necessary actions. We expect this to contribute greatly to the next-generation high-performance SSD market.” He added, “The de-coupled architecture is a structure that can actively operate to extend devices’ lifespan. In other words, its significance is not limited to the level of performance and can, therefore, be used for various applications.”
KAIST commented that this research is also meaningful in that the results were reaped through a collaborative study between two world-renowned researchers: Professor Myeongsoo Jung, recognized in the field of computer system storage devices, and Professor Dongjun Kim, a leading researcher in computer architecture and interconnection networks.
This research was funded by the National Research Foundation of Korea, Samsung Electronics, the IC Design Education Center, and Next Generation Semiconductor Technology and Development granted by the Institute of Information & Communications Technology, Planning & Evaluation.
2023.06.23 View 3068 -
 A KAIST research team unveils new path for dense photonic integration
Integrated optical semiconductor (hereinafter referred to as optical semiconductor) technology is a next-generation semiconductor technology for which many researches and investments are being made worldwide because it can make complex optical systems such as LiDAR and quantum sensors and computers into a single small chip. In the existing semiconductor technology, the key was how small it was to make it in units of 5 nanometers or 2 nanometers, but increasing the degree of integration in optical semiconductor devices can be said to be a key technology that determines performance, price, and energy efficiency.
KAIST (President Kwang-Hyung Lee) announced on the 19th that a research team led by Professor Sangsik Kim of the Department of Electrical and Electronic Engineering discovered a new optical coupling mechanism that can increase the degree of integration of optical semiconductor devices by more than 100 times.
The degree of the number of elements that can be configured per chip is called the degree of integration. However, it is very difficult to increase the degree of integration of optical semiconductor devices, because crosstalk occurs between photons between adjacent devices due to the wave nature of light.
In previous studies, it was possible to reduce crosstalk of light only in specific polarizations, but in this study, the research team developed a method to increase the degree of integration even under polarization conditions, which were previously considered impossible, by discovering a new light coupling mechanism.
This study, led by Professor Sangsik Kim as a corresponding author and conducted with students he taught at Texas Tech University, was published in the international journal 'Light: Science & Applications' [IF=20.257] on June 2nd. done. (Paper title: Anisotropic leaky-like perturbation with subwavelength gratings enables zero crosstalk).
Professor Sangsik Kim said, "The interesting thing about this study is that it paradoxically eliminated the confusion through leaky waves (light tends to spread sideways), which was previously thought to increase the crosstalk." He went on to add, “If the optical coupling method using the leaky wave revealed in this study is applied, it will be possible to develop various optical semiconductor devices that are smaller and that has less noise.”
Professor Sangsik Kim is a researcher recognized for his expertise and research in optical semiconductor integration. Through his previous research, he developed an all-dielectric metamaterial that can control the degree of light spreading laterally by patterning a semiconductor structure at a size smaller than the wavelength, and proved this through experiments to improve the degree of integration of optical semiconductors. These studies were reported in ‘Nature Communications’ (Vol. 9, Article 1893, 2018) and ‘Optica’ (Vol. 7, pp. 881-887, 2020). In recognition of these achievements, Professor Kim has received the NSF Career Award from the National Science Foundation (NSF) and the Young Scientist Award from the Association of Korean-American Scientists and Engineers.
Meanwhile, this research was carried out with the support from the New Research Project of Excellence of the National Research Foundation of Korea and and the National Science Foundation of the US.
< Figure 1. Illustration depicting light propagation without crosstalk in the waveguide array of the developed metamaterial-based optical semiconductor >
2023.06.21 View 3101
A KAIST research team unveils new path for dense photonic integration
Integrated optical semiconductor (hereinafter referred to as optical semiconductor) technology is a next-generation semiconductor technology for which many researches and investments are being made worldwide because it can make complex optical systems such as LiDAR and quantum sensors and computers into a single small chip. In the existing semiconductor technology, the key was how small it was to make it in units of 5 nanometers or 2 nanometers, but increasing the degree of integration in optical semiconductor devices can be said to be a key technology that determines performance, price, and energy efficiency.
KAIST (President Kwang-Hyung Lee) announced on the 19th that a research team led by Professor Sangsik Kim of the Department of Electrical and Electronic Engineering discovered a new optical coupling mechanism that can increase the degree of integration of optical semiconductor devices by more than 100 times.
The degree of the number of elements that can be configured per chip is called the degree of integration. However, it is very difficult to increase the degree of integration of optical semiconductor devices, because crosstalk occurs between photons between adjacent devices due to the wave nature of light.
In previous studies, it was possible to reduce crosstalk of light only in specific polarizations, but in this study, the research team developed a method to increase the degree of integration even under polarization conditions, which were previously considered impossible, by discovering a new light coupling mechanism.
This study, led by Professor Sangsik Kim as a corresponding author and conducted with students he taught at Texas Tech University, was published in the international journal 'Light: Science & Applications' [IF=20.257] on June 2nd. done. (Paper title: Anisotropic leaky-like perturbation with subwavelength gratings enables zero crosstalk).
Professor Sangsik Kim said, "The interesting thing about this study is that it paradoxically eliminated the confusion through leaky waves (light tends to spread sideways), which was previously thought to increase the crosstalk." He went on to add, “If the optical coupling method using the leaky wave revealed in this study is applied, it will be possible to develop various optical semiconductor devices that are smaller and that has less noise.”
Professor Sangsik Kim is a researcher recognized for his expertise and research in optical semiconductor integration. Through his previous research, he developed an all-dielectric metamaterial that can control the degree of light spreading laterally by patterning a semiconductor structure at a size smaller than the wavelength, and proved this through experiments to improve the degree of integration of optical semiconductors. These studies were reported in ‘Nature Communications’ (Vol. 9, Article 1893, 2018) and ‘Optica’ (Vol. 7, pp. 881-887, 2020). In recognition of these achievements, Professor Kim has received the NSF Career Award from the National Science Foundation (NSF) and the Young Scientist Award from the Association of Korean-American Scientists and Engineers.
Meanwhile, this research was carried out with the support from the New Research Project of Excellence of the National Research Foundation of Korea and and the National Science Foundation of the US.
< Figure 1. Illustration depicting light propagation without crosstalk in the waveguide array of the developed metamaterial-based optical semiconductor >
2023.06.21 View 3101 -
 A KAIST Research Team Identifies a Cancer Reversion Mechanism
Despite decades of intensive cancer research by numerous biomedical scientists, cancer still holds its place as the number one cause of death in Korea. The fundamental reason behind the limitations of current cancer treatment methods is the fact that they all aim to completely destroy cancer cells, which eventually allows the cancer cells to acquire immunity. In other words, recurrences and side-effects caused by the destruction of healthy cells are inevitable. To this end, some have suggested anticancer treatment methods based on cancer reversion, which can revert cancer cells back to normal or near-normal cells under certain conditions. However, the practical development of this idea has not yet been attempted.
On June 8, a KAIST research team led by Professor Kwang-Hyun Cho from the Department of Bio and Brain Engineering reported to have successfully identified the fundamental principle of a process that can revert cancer cells back to normal cells without killing the cells.
Professor Cho’s team focused on the fact that unlike normal cells, which react according to external stimuli, cancer cells tend to ignore such stimuli and only undergo uncontrolled cell division. Through computer simulation analysis, the team discovered that the input-output (I/O) relationships that were distorted by genetic mutations could be reverted back to normal I/O relationships under certain conditions. The team then demonstrated through molecular cell experiments that such I/O relationship recovery also occurred in real cancer cells.
The results of this study, written by Dr. Jae Il Joo and Dr. Hwa-Jeong Park, were published in Wiley’s Advanced Science online on June 2 under the title, "Normalizing input-output relationships of cancer networks for reversion therapy."
< Image 1. Input-output (I/O) relationships in gene regulatory networks >
Professor Kwang-Hyun Cho's research team classified genes into four types by simulation-analyzing the effect of gene mutations on the I/O relationship of gene regulatory networks. (Figure A-J) In addition, by analyzing 18 genes of the cancer-related gene regulatory network, it was confirmed that when mutations occur in more than half of the genes constituting each network, reversibility is possible through appropriate control. (Figure K)
Professor Cho’s team uncovered that the reason the distorted I/O relationships of cancer cells could be reverted back to normal ones was the robustness and redundancy of intracellular gene control networks that developed over the course of evolution. In addition, they found that some genes were more promising as targets for cancer reversion than others, and showed through molecular cell experiments that controlling such genes could revert the distorted I/O relationships of cancer cells back to normal ones.
< Image 2. Simulation results of restoration of bladder cancer gene regulation network and I/O relationship of bladder cancer cells. >
The research team classified the effects of gene mutations on the I/O relationship in the bladder cancer gene regulation network by simulation analysis and classified them into 4 types. (Figure A) Through this, it was found that the distorted input-output relationship between bladder cancer cell lines KU-1919 and HCT-1197 could be restored to normal. (Figure B)
< Image 3. Analysis of survival of bladder cancer patients according to reversible gene mutation and I/O recovery experiment of bladder cancer cells. >
As predicted through network simulation analysis, Professor Kwang-Hyun Cho's research team confirmed through molecular cell experiments that the response to TGF-b was normally restored when AKT and MAP3K1 were inhibited in the bladder cancer cell line KU-1919. (Figure A-G) In addition, it was confirmed that there is a difference in the survival rate of bladder cancer patients depending on the presence or absence of a reversible gene mutation. (Figure H)
The results of this research show that the reversion of real cancer cells does not happen by chance, and that it is possible to systematically explore targets that can induce this phenomenon, thereby creating the potential for the development of innovative anticancer drugs that can control such target genes.
< Image 4. Cancer cell reversibility principle >
The research team analyzed the reversibility, redundancy, and robustness of various networks and found that there was a positive correlation between them. From this, it was found that reversibility was additionally inherent in the process of evolution in which the gene regulatory network acquired redundancy and consistency.
Professor Cho said, “By uncovering the fundamental principles of a new cancer reversion treatment strategy that may overcome the unresolved limitations of existing chemotherapy, we have increased the possibility of developing new and innovative drugs that can improve both the prognosis and quality of life of cancer patients.”
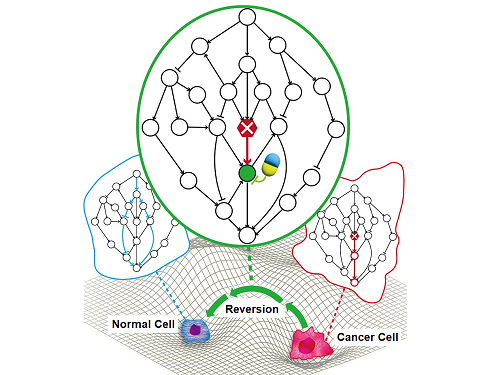
< Image 5. Conceptual diagram of research results >
The research team identified the fundamental control principle of cancer cell reversibility through systems biology research. When the I/O relationship of the intracellular gene regulatory network is distorted by mutation, the distorted I/O relationship can be restored to a normal state by identifying and adjusting the reversible gene target based on the redundancy of the molecular circuit inherent in the complex network.
After Professor Cho’s team first suggested the concept of reversion treatment, they published their results for reverting colorectal cancer in January 2020, and in January 2022 they successfully re-programmed malignant breast cancer cells back into hormone-treatable ones. In January 2023, the team successfully removed the metastasis ability from lung cancer cells and reverted them back to a state that allowed improved drug reactivity. However, these results were case studies of specific types of cancer and did not reveal what common principle allowed cancer reversion across all cancer types, making this the first revelation of the general principle of cancer reversion and its evolutionary origins.
This research was funded by the Ministry of Science and ICT of the Republic of Korea and the National Research Foundation of Korea.
2023.06.20 View 3349
A KAIST Research Team Identifies a Cancer Reversion Mechanism
Despite decades of intensive cancer research by numerous biomedical scientists, cancer still holds its place as the number one cause of death in Korea. The fundamental reason behind the limitations of current cancer treatment methods is the fact that they all aim to completely destroy cancer cells, which eventually allows the cancer cells to acquire immunity. In other words, recurrences and side-effects caused by the destruction of healthy cells are inevitable. To this end, some have suggested anticancer treatment methods based on cancer reversion, which can revert cancer cells back to normal or near-normal cells under certain conditions. However, the practical development of this idea has not yet been attempted.
On June 8, a KAIST research team led by Professor Kwang-Hyun Cho from the Department of Bio and Brain Engineering reported to have successfully identified the fundamental principle of a process that can revert cancer cells back to normal cells without killing the cells.
Professor Cho’s team focused on the fact that unlike normal cells, which react according to external stimuli, cancer cells tend to ignore such stimuli and only undergo uncontrolled cell division. Through computer simulation analysis, the team discovered that the input-output (I/O) relationships that were distorted by genetic mutations could be reverted back to normal I/O relationships under certain conditions. The team then demonstrated through molecular cell experiments that such I/O relationship recovery also occurred in real cancer cells.
The results of this study, written by Dr. Jae Il Joo and Dr. Hwa-Jeong Park, were published in Wiley’s Advanced Science online on June 2 under the title, "Normalizing input-output relationships of cancer networks for reversion therapy."
< Image 1. Input-output (I/O) relationships in gene regulatory networks >
Professor Kwang-Hyun Cho's research team classified genes into four types by simulation-analyzing the effect of gene mutations on the I/O relationship of gene regulatory networks. (Figure A-J) In addition, by analyzing 18 genes of the cancer-related gene regulatory network, it was confirmed that when mutations occur in more than half of the genes constituting each network, reversibility is possible through appropriate control. (Figure K)
Professor Cho’s team uncovered that the reason the distorted I/O relationships of cancer cells could be reverted back to normal ones was the robustness and redundancy of intracellular gene control networks that developed over the course of evolution. In addition, they found that some genes were more promising as targets for cancer reversion than others, and showed through molecular cell experiments that controlling such genes could revert the distorted I/O relationships of cancer cells back to normal ones.
< Image 2. Simulation results of restoration of bladder cancer gene regulation network and I/O relationship of bladder cancer cells. >
The research team classified the effects of gene mutations on the I/O relationship in the bladder cancer gene regulation network by simulation analysis and classified them into 4 types. (Figure A) Through this, it was found that the distorted input-output relationship between bladder cancer cell lines KU-1919 and HCT-1197 could be restored to normal. (Figure B)
< Image 3. Analysis of survival of bladder cancer patients according to reversible gene mutation and I/O recovery experiment of bladder cancer cells. >
As predicted through network simulation analysis, Professor Kwang-Hyun Cho's research team confirmed through molecular cell experiments that the response to TGF-b was normally restored when AKT and MAP3K1 were inhibited in the bladder cancer cell line KU-1919. (Figure A-G) In addition, it was confirmed that there is a difference in the survival rate of bladder cancer patients depending on the presence or absence of a reversible gene mutation. (Figure H)
The results of this research show that the reversion of real cancer cells does not happen by chance, and that it is possible to systematically explore targets that can induce this phenomenon, thereby creating the potential for the development of innovative anticancer drugs that can control such target genes.
< Image 4. Cancer cell reversibility principle >
The research team analyzed the reversibility, redundancy, and robustness of various networks and found that there was a positive correlation between them. From this, it was found that reversibility was additionally inherent in the process of evolution in which the gene regulatory network acquired redundancy and consistency.
Professor Cho said, “By uncovering the fundamental principles of a new cancer reversion treatment strategy that may overcome the unresolved limitations of existing chemotherapy, we have increased the possibility of developing new and innovative drugs that can improve both the prognosis and quality of life of cancer patients.”
< Image 5. Conceptual diagram of research results >
The research team identified the fundamental control principle of cancer cell reversibility through systems biology research. When the I/O relationship of the intracellular gene regulatory network is distorted by mutation, the distorted I/O relationship can be restored to a normal state by identifying and adjusting the reversible gene target based on the redundancy of the molecular circuit inherent in the complex network.
After Professor Cho’s team first suggested the concept of reversion treatment, they published their results for reverting colorectal cancer in January 2020, and in January 2022 they successfully re-programmed malignant breast cancer cells back into hormone-treatable ones. In January 2023, the team successfully removed the metastasis ability from lung cancer cells and reverted them back to a state that allowed improved drug reactivity. However, these results were case studies of specific types of cancer and did not reveal what common principle allowed cancer reversion across all cancer types, making this the first revelation of the general principle of cancer reversion and its evolutionary origins.
This research was funded by the Ministry of Science and ICT of the Republic of Korea and the National Research Foundation of Korea.
2023.06.20 View 3349 -
 Researchers finds a way to reduce the overheating of semiconductor devices
The demand to shrink the size of semiconductors coupled with the problem of the heat generated at the hot spots of the devices not being effectively dispersed has negatively affected the reliability and durability of modern devices. Existing thermal management technologies have not been up to the task. Thus, the discovery of a new way of dispersing heat by using surface waves generated on the thin metal films over the substrate is an important breakthrough.
KAIST (President Kwang Hyung Lee) announced that Professor Bong Jae Lee's research team in the Department of Mechanical Engineering succeeded in measuring a newly observed transference of heat induced by 'surface plasmon polariton' (SPP) in a thin metal film deposited on a substrate for the first time in the world.
☞ Surface plasmon polariton (SPP) refers to a surface wave formed on the surface of a metal as a result of strong interaction between the electromagnetic field at the interface between the dielectric and the metal and the free electrons on the metal surface and similar collectively vibrating particles.
The research team utilized surface plasmon polaritons (SPP), which are surface waves generated at the metal-dielectric interface, to improve thermal diffusion in nanoscale thin metal films. Since this new heat transfer mode occurs when a thin film of metal is deposited on a substrate, it is highly usable in the device manufacturing process and has the advantage of being able to be manufactured over a large area. The research team showed that the thermal conductivity increased by about 25% due to surface waves generated over a 100-nm-thick titanium (Ti) film with a radius of about 3 cm.
KAIST Professor Bong Jae Lee, who led the research, said, "The significance of this research is that a new heat transfer mode using surface waves over a thin metal film deposited on a substrate with low processing difficulty was identified for the first time in the world. It can be applied as a nanoscale heat spreader to efficiently dissipate heat near the hot spots for easily overheatable semiconductor devices.”
The result has great implications for the development of high-performance semiconductor devices in the future in that it can be applied to rapidly dissipate heat on a nanoscale thin film. In particular, this new heat transfer mode identified by the research team is expected to solve the fundamental problem of thermal management in semiconductor devices as it enables even more effective heat transfer at nanoscale thickness while the thermal conductivity of the thin film usually decreases due to the boundary scattering effect.
This study was published online on April 26 in 'Physical Review Letters' and was selected as an Editors' Suggestion. The research was carried out with support from the Basic Research Laboratory Support Program of the National Research Foundation of Korea.
< Figure. Schematic diagram of the principle of measuring the thermal conductivity of thin Titanium (TI) films and the thermal conductivity of surface plasmon polariton measured on the Ti film >
2023.06.01 View 3413
Researchers finds a way to reduce the overheating of semiconductor devices
The demand to shrink the size of semiconductors coupled with the problem of the heat generated at the hot spots of the devices not being effectively dispersed has negatively affected the reliability and durability of modern devices. Existing thermal management technologies have not been up to the task. Thus, the discovery of a new way of dispersing heat by using surface waves generated on the thin metal films over the substrate is an important breakthrough.
KAIST (President Kwang Hyung Lee) announced that Professor Bong Jae Lee's research team in the Department of Mechanical Engineering succeeded in measuring a newly observed transference of heat induced by 'surface plasmon polariton' (SPP) in a thin metal film deposited on a substrate for the first time in the world.
☞ Surface plasmon polariton (SPP) refers to a surface wave formed on the surface of a metal as a result of strong interaction between the electromagnetic field at the interface between the dielectric and the metal and the free electrons on the metal surface and similar collectively vibrating particles.
The research team utilized surface plasmon polaritons (SPP), which are surface waves generated at the metal-dielectric interface, to improve thermal diffusion in nanoscale thin metal films. Since this new heat transfer mode occurs when a thin film of metal is deposited on a substrate, it is highly usable in the device manufacturing process and has the advantage of being able to be manufactured over a large area. The research team showed that the thermal conductivity increased by about 25% due to surface waves generated over a 100-nm-thick titanium (Ti) film with a radius of about 3 cm.
KAIST Professor Bong Jae Lee, who led the research, said, "The significance of this research is that a new heat transfer mode using surface waves over a thin metal film deposited on a substrate with low processing difficulty was identified for the first time in the world. It can be applied as a nanoscale heat spreader to efficiently dissipate heat near the hot spots for easily overheatable semiconductor devices.”
The result has great implications for the development of high-performance semiconductor devices in the future in that it can be applied to rapidly dissipate heat on a nanoscale thin film. In particular, this new heat transfer mode identified by the research team is expected to solve the fundamental problem of thermal management in semiconductor devices as it enables even more effective heat transfer at nanoscale thickness while the thermal conductivity of the thin film usually decreases due to the boundary scattering effect.
This study was published online on April 26 in 'Physical Review Letters' and was selected as an Editors' Suggestion. The research was carried out with support from the Basic Research Laboratory Support Program of the National Research Foundation of Korea.
< Figure. Schematic diagram of the principle of measuring the thermal conductivity of thin Titanium (TI) films and the thermal conductivity of surface plasmon polariton measured on the Ti film >
2023.06.01 View 3413 -
 'Jumping Genes' Found to Alter Human Colon Genomes, Offering Insights into Aging and Tumorigenesis
The Korea Advanced Institute of Science and Technology (KAIST) and their collaborators have conducted a groundbreaking study targeting 'jumping genes' in the entire genomes of the human large intestine. Published in Nature on May 18 2023, the research unveils the surprising activity of 'Long interspersed nuclear element-1 (L1),' a type of jumping gene previously thought to be mostly dormant in human genomes. The study shows that L1 genes can become activated and disrupt genomic functions throughout an individual's lifetime, particularly in the colorectal epithelium.
(Paper Title: Widespread somatic L1 retrotransposition in normal colorectal epithelium, https://www.nature.com/articles/s41586-023-06046-z)
With approximately 500,000 L1 jumping genes, accounting for 17% of the human genome, they have long been recognized for their contribution to the evolution of the human species by introducing 'disruptive innovation' to genome sequences. Until now, it was believed that most L1 elements had lost their ability to jump in normal tissues of modern humans. However, this study reveals that some L1 jumping genes can be widely activated in normal cells, leading to the accumulation of genomic mutations over an individual's lifetime. The rate of L1 jumping and resulting genomic changes vary among different cell types, with a notable concentration observed in aged colon epithelial cells. The study illustrates that every colonic epithelial cell experiences an L1 jumping event by the age of 40 on average.
The research, led by co-first authors Chang Hyun Nam (a graduate student at KAIST) and Dr. Jeonghwan Youk (former graduate student at KAIST and assistant clinical professor at Seoul National University Hospital), involved the analysis of whole-genome sequences from 899 single cells obtained from skin (fibroblasts), blood, and colon epithelial tissues collected from 28 individuals. The study uncovers the activation of L1 jumping genes in normal cells, resulting in the gradual accumulation of genomic mutations over time. Additionally, the team explored epigenomic (DNA methylation) sequences to understand the mechanism behind L1 jumping gene activation. They found that cells with activated L1 jumping genes exhibit epigenetic instability, suggesting the critical role of epigenetic changes in regulating L1 jumping gene activity. Most of these epigenomic instabilities were found to arise during the early stages of embryogenesis. The study provides valuable insights into the aging process and the development of diseases in human colorectal tissues.
"This study illustrates that genomic damage in normal cells is acquired not only through exposure to carcinogens but also through the activity of endogenous components whose impact was previously unclear. Genomes of apparently healthy aged cells, particularly in the colorectal epithelium, become mosaic due to the activity of L1 jumping genes," said Prof. Young Seok Ju at KAIST.
"We emphasize the essential and ongoing collaboration among researchers in clinical medicine and basic medical sciences," said Prof. Min Jung Kim of the Department of Surgery at Seoul National University Hospital. "This case highlights the critical role of systematically collected human tissues from clinical settings in unraveling the complex process of disease development in humans."
"I am delighted that the research team's advancements in single-cell genome technology have come to fruition. We will persistently strive to lead in single-cell genome technology," said Prof. Hyun Woo Kwon of the Department of Nuclear Medicine at Korea University School of Medicine.
The research team received support from the Research Leader Program and the Young Researcher Program of the National Research Foundation of Korea, a grant from the MD-PhD/Medical Scientist Training Program through the Korea Health Industry Development Institute, and the Suh Kyungbae Foundation.
< Figure 1. Experimental design of the study >
< Figure 2. Schematic diagram illustrating factors influencing the soL1R landscape. >
Genetic composition of rc-L1s is inherited from the parents. The methylation landscape of rc-L1 promoters is predominantly determined by global DNA demethylation, followed by remethylation processes in the developmental stages. Then, when an rc-L1 is promoter demethylated in a specific cell lineage, the source expresses L1 transcripts thus making possible the induction of soL1Rs.
2023.05.22 View 3211
'Jumping Genes' Found to Alter Human Colon Genomes, Offering Insights into Aging and Tumorigenesis
The Korea Advanced Institute of Science and Technology (KAIST) and their collaborators have conducted a groundbreaking study targeting 'jumping genes' in the entire genomes of the human large intestine. Published in Nature on May 18 2023, the research unveils the surprising activity of 'Long interspersed nuclear element-1 (L1),' a type of jumping gene previously thought to be mostly dormant in human genomes. The study shows that L1 genes can become activated and disrupt genomic functions throughout an individual's lifetime, particularly in the colorectal epithelium.
(Paper Title: Widespread somatic L1 retrotransposition in normal colorectal epithelium, https://www.nature.com/articles/s41586-023-06046-z)
With approximately 500,000 L1 jumping genes, accounting for 17% of the human genome, they have long been recognized for their contribution to the evolution of the human species by introducing 'disruptive innovation' to genome sequences. Until now, it was believed that most L1 elements had lost their ability to jump in normal tissues of modern humans. However, this study reveals that some L1 jumping genes can be widely activated in normal cells, leading to the accumulation of genomic mutations over an individual's lifetime. The rate of L1 jumping and resulting genomic changes vary among different cell types, with a notable concentration observed in aged colon epithelial cells. The study illustrates that every colonic epithelial cell experiences an L1 jumping event by the age of 40 on average.
The research, led by co-first authors Chang Hyun Nam (a graduate student at KAIST) and Dr. Jeonghwan Youk (former graduate student at KAIST and assistant clinical professor at Seoul National University Hospital), involved the analysis of whole-genome sequences from 899 single cells obtained from skin (fibroblasts), blood, and colon epithelial tissues collected from 28 individuals. The study uncovers the activation of L1 jumping genes in normal cells, resulting in the gradual accumulation of genomic mutations over time. Additionally, the team explored epigenomic (DNA methylation) sequences to understand the mechanism behind L1 jumping gene activation. They found that cells with activated L1 jumping genes exhibit epigenetic instability, suggesting the critical role of epigenetic changes in regulating L1 jumping gene activity. Most of these epigenomic instabilities were found to arise during the early stages of embryogenesis. The study provides valuable insights into the aging process and the development of diseases in human colorectal tissues.
"This study illustrates that genomic damage in normal cells is acquired not only through exposure to carcinogens but also through the activity of endogenous components whose impact was previously unclear. Genomes of apparently healthy aged cells, particularly in the colorectal epithelium, become mosaic due to the activity of L1 jumping genes," said Prof. Young Seok Ju at KAIST.
"We emphasize the essential and ongoing collaboration among researchers in clinical medicine and basic medical sciences," said Prof. Min Jung Kim of the Department of Surgery at Seoul National University Hospital. "This case highlights the critical role of systematically collected human tissues from clinical settings in unraveling the complex process of disease development in humans."
"I am delighted that the research team's advancements in single-cell genome technology have come to fruition. We will persistently strive to lead in single-cell genome technology," said Prof. Hyun Woo Kwon of the Department of Nuclear Medicine at Korea University School of Medicine.
The research team received support from the Research Leader Program and the Young Researcher Program of the National Research Foundation of Korea, a grant from the MD-PhD/Medical Scientist Training Program through the Korea Health Industry Development Institute, and the Suh Kyungbae Foundation.
< Figure 1. Experimental design of the study >
< Figure 2. Schematic diagram illustrating factors influencing the soL1R landscape. >
Genetic composition of rc-L1s is inherited from the parents. The methylation landscape of rc-L1 promoters is predominantly determined by global DNA demethylation, followed by remethylation processes in the developmental stages. Then, when an rc-L1 is promoter demethylated in a specific cell lineage, the source expresses L1 transcripts thus making possible the induction of soL1Rs.
2023.05.22 View 3211 -
 KAIST debuts “DreamWaQer” - a quadrupedal robot that can walk in the dark
- The team led by Professor Hyun Myung of the School of Electrical Engineering developed “DreamWaQ”, a deep reinforcement learning-based walking robot control technology that can walk in an atypical environment without visual and/or tactile information
- Utilization of “DreamWaQ” technology can enable mass production of various types of “DreamWaQers”
- Expected to be used in exploration of atypical environment involving unique circumstances such as disasters by fire.
A team of Korean engineering researchers has developed a quadrupedal robot technology that can climb up and down the steps and moves without falling over in uneven environments such as tree roots without the help of visual or tactile sensors even in disastrous situations in which visual confirmation is impeded due to darkness or thick smoke from the flames.
KAIST (President Kwang Hyung Lee) announced on the 29th of March that Professor Hyun Myung's research team at the Urban Robotics Lab in the School of Electrical Engineering developed a walking robot control technology that enables robust 'blind locomotion' in various atypical environments.
< (From left) Prof. Hyun Myung, Doctoral Candidates I Made Aswin Nahrendra, Byeongho Yu, and Minho Oh. In the foreground is the DreamWaQer, a quadrupedal robot equipped with DreamWaQ technology. >
The KAIST research team developed "DreamWaQ" technology, which was named so as it enables walking robots to move about even in the dark, just as a person can walk without visual help fresh out of bed and going to the bathroom in the dark. With this technology installed atop any legged robots, it will be possible to create various types of "DreamWaQers".
Existing walking robot controllers are based on kinematics and/or dynamics models. This is expressed as a model-based control method. In particular, on atypical environments like the open, uneven fields, it is necessary to obtain the feature information of the terrain more quickly in order to maintain stability as it walks. However, it has been shown to depend heavily on the cognitive ability to survey the surrounding environment.
In contrast, the controller developed by Professor Hyun Myung's research team based on deep reinforcement learning (RL) methods can quickly calculate appropriate control commands for each motor of the walking robot through data of various environments obtained from the simulator. Whereas the existing controllers that learned from simulations required a separate re-orchestration to make it work with an actual robot, this controller developed by the research team is expected to be easily applied to various walking robots because it does not require an additional tuning process.
DreamWaQ, the controller developed by the research team, is largely composed of a context estimation network that estimates the ground and robot information and a policy network that computes control commands. The context-aided estimator network estimates the ground information implicitly and the robot’s status explicitly through inertial information and joint information. This information is fed into the policy network to be used to generate optimal control commands. Both networks are learned together in the simulation.
While the context-aided estimator network is learned through supervised learning, the policy network is learned through an actor-critic architecture, a deep RL methodology. The actor network can only implicitly infer surrounding terrain information. In the simulation, the surrounding terrain information is known, and the critic, or the value network, that has the exact terrain information evaluates the policy of the actor network.
This whole learning process takes only about an hour in a GPU-enabled PC, and the actual robot is equipped with only the network of learned actors. Without looking at the surrounding terrain, it goes through the process of imagining which environment is similar to one of the various environments learned in the simulation using only the inertial sensor (IMU) inside the robot and the measurement of joint angles. If it suddenly encounters an offset, such as a staircase, it will not know until its foot touches the step, but it will quickly draw up terrain information the moment its foot touches the surface. Then the control command suitable for the estimated terrain information is transmitted to each motor, enabling rapidly adapted walking.
The DreamWaQer robot walked not only in the laboratory environment, but also in an outdoor environment around the campus with many curbs and speed bumps, and over a field with many tree roots and gravel, demonstrating its abilities by overcoming a staircase with a difference of a height that is two-thirds of its body. In addition, regardless of the environment, the research team confirmed that it was capable of stable walking ranging from a slow speed of 0.3 m/s to a rather fast speed of 1.0 m/s.
The results of this study were produced by a student in doctorate course, I Made Aswin Nahrendra, as the first author, and his colleague Byeongho Yu as a co-author. It has been accepted to be presented at the upcoming IEEE International Conference on Robotics and Automation (ICRA) scheduled to be held in London at the end of May. (Paper title: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning)
The videos of the walking robot DreamWaQer equipped with the developed DreamWaQ can be found at the address below.
Main Introduction: https://youtu.be/JC1_bnTxPiQ Experiment Sketches: https://youtu.be/mhUUZVbeDA0
Meanwhile, this research was carried out with the support from the Robot Industry Core Technology Development Program of the Ministry of Trade, Industry and Energy (MOTIE). (Task title: Development of Mobile Intelligence SW for Autonomous Navigation of Legged Robots in Dynamic and Atypical Environments for Real Application)
< Figure 1. Overview of DreamWaQ, a controller developed by this research team. This network consists of an estimator network that learns implicit and explicit estimates together, a policy network that acts as a controller, and a value network that provides guides to the policies during training. When implemented in a real robot, only the estimator and policy network are used. Both networks run in less than 1 ms on the robot's on-board computer. >
< Figure 2. Since the estimator can implicitly estimate the ground information as the foot touches the surface, it is possible to adapt quickly to rapidly changing ground conditions. >
< Figure 3. Results showing that even a small walking robot was able to overcome steps with height differences of about 20cm. >
2023.05.18 View 4657
KAIST debuts “DreamWaQer” - a quadrupedal robot that can walk in the dark
- The team led by Professor Hyun Myung of the School of Electrical Engineering developed “DreamWaQ”, a deep reinforcement learning-based walking robot control technology that can walk in an atypical environment without visual and/or tactile information
- Utilization of “DreamWaQ” technology can enable mass production of various types of “DreamWaQers”
- Expected to be used in exploration of atypical environment involving unique circumstances such as disasters by fire.
A team of Korean engineering researchers has developed a quadrupedal robot technology that can climb up and down the steps and moves without falling over in uneven environments such as tree roots without the help of visual or tactile sensors even in disastrous situations in which visual confirmation is impeded due to darkness or thick smoke from the flames.
KAIST (President Kwang Hyung Lee) announced on the 29th of March that Professor Hyun Myung's research team at the Urban Robotics Lab in the School of Electrical Engineering developed a walking robot control technology that enables robust 'blind locomotion' in various atypical environments.
< (From left) Prof. Hyun Myung, Doctoral Candidates I Made Aswin Nahrendra, Byeongho Yu, and Minho Oh. In the foreground is the DreamWaQer, a quadrupedal robot equipped with DreamWaQ technology. >
The KAIST research team developed "DreamWaQ" technology, which was named so as it enables walking robots to move about even in the dark, just as a person can walk without visual help fresh out of bed and going to the bathroom in the dark. With this technology installed atop any legged robots, it will be possible to create various types of "DreamWaQers".
Existing walking robot controllers are based on kinematics and/or dynamics models. This is expressed as a model-based control method. In particular, on atypical environments like the open, uneven fields, it is necessary to obtain the feature information of the terrain more quickly in order to maintain stability as it walks. However, it has been shown to depend heavily on the cognitive ability to survey the surrounding environment.
In contrast, the controller developed by Professor Hyun Myung's research team based on deep reinforcement learning (RL) methods can quickly calculate appropriate control commands for each motor of the walking robot through data of various environments obtained from the simulator. Whereas the existing controllers that learned from simulations required a separate re-orchestration to make it work with an actual robot, this controller developed by the research team is expected to be easily applied to various walking robots because it does not require an additional tuning process.
DreamWaQ, the controller developed by the research team, is largely composed of a context estimation network that estimates the ground and robot information and a policy network that computes control commands. The context-aided estimator network estimates the ground information implicitly and the robot’s status explicitly through inertial information and joint information. This information is fed into the policy network to be used to generate optimal control commands. Both networks are learned together in the simulation.
While the context-aided estimator network is learned through supervised learning, the policy network is learned through an actor-critic architecture, a deep RL methodology. The actor network can only implicitly infer surrounding terrain information. In the simulation, the surrounding terrain information is known, and the critic, or the value network, that has the exact terrain information evaluates the policy of the actor network.
This whole learning process takes only about an hour in a GPU-enabled PC, and the actual robot is equipped with only the network of learned actors. Without looking at the surrounding terrain, it goes through the process of imagining which environment is similar to one of the various environments learned in the simulation using only the inertial sensor (IMU) inside the robot and the measurement of joint angles. If it suddenly encounters an offset, such as a staircase, it will not know until its foot touches the step, but it will quickly draw up terrain information the moment its foot touches the surface. Then the control command suitable for the estimated terrain information is transmitted to each motor, enabling rapidly adapted walking.
The DreamWaQer robot walked not only in the laboratory environment, but also in an outdoor environment around the campus with many curbs and speed bumps, and over a field with many tree roots and gravel, demonstrating its abilities by overcoming a staircase with a difference of a height that is two-thirds of its body. In addition, regardless of the environment, the research team confirmed that it was capable of stable walking ranging from a slow speed of 0.3 m/s to a rather fast speed of 1.0 m/s.
The results of this study were produced by a student in doctorate course, I Made Aswin Nahrendra, as the first author, and his colleague Byeongho Yu as a co-author. It has been accepted to be presented at the upcoming IEEE International Conference on Robotics and Automation (ICRA) scheduled to be held in London at the end of May. (Paper title: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning)
The videos of the walking robot DreamWaQer equipped with the developed DreamWaQ can be found at the address below.
Main Introduction: https://youtu.be/JC1_bnTxPiQ Experiment Sketches: https://youtu.be/mhUUZVbeDA0
Meanwhile, this research was carried out with the support from the Robot Industry Core Technology Development Program of the Ministry of Trade, Industry and Energy (MOTIE). (Task title: Development of Mobile Intelligence SW for Autonomous Navigation of Legged Robots in Dynamic and Atypical Environments for Real Application)
< Figure 1. Overview of DreamWaQ, a controller developed by this research team. This network consists of an estimator network that learns implicit and explicit estimates together, a policy network that acts as a controller, and a value network that provides guides to the policies during training. When implemented in a real robot, only the estimator and policy network are used. Both networks run in less than 1 ms on the robot's on-board computer. >
< Figure 2. Since the estimator can implicitly estimate the ground information as the foot touches the surface, it is possible to adapt quickly to rapidly changing ground conditions. >
< Figure 3. Results showing that even a small walking robot was able to overcome steps with height differences of about 20cm. >
2023.05.18 View 4657 -
 Synthetic sRNAs to knockdown genes in medical and industrial bacteria
Bacteria are intimately involved in our daily lives. These microorganisms have been used in human history for food such as cheese, yogurt, and wine, In more recent years, through metabolic engineering, microorganisms been used extensively as microbial cell factories to manufacture plastics, feed for livestock, dietary supplements, and drugs. However, in addition to these bacteria that are beneficial to human lives, pathogens such as Pneumonia, Salmonella, and Staphylococcus that cause various infectious diseases are also ubiquitously present. It is important to be able to metabolically control these beneficial industrial bacteria for high value-added chemicals production and to manipulate harmful pathogens to suppress its pathogenic traits.
KAIST (President Kwang Hyung Lee) announced on the 10th that a research team led by Distinguished Professor Sang Yup Lee of the Department of Biochemical Engineering has developed a new sRNA tool that can effectively inhibit target genes in various bacteria, including both Gram-negative and Gram-positive bacteria. The research results were published online on April 24 in Nature Communications.
※ Thesis title: Targeted and high-throughput gene knockdown in diverse bacteria using synthetic sRNAs
※ Author information : Jae Sung Cho (co-1st), Dongsoo Yang (co-1st), Cindy Pricilia Surya Prabowo (co-author), Mohammad Rifqi Ghiffary (co-author), Taehee Han (co-author), Kyeong Rok Choi (co-author), Cheon Woo Moon (co-author), Hengrui Zhou (co-author), Jae Yong Ryu (co-author), Hyun Uk Kim (co-author) and Sang Yup Lee (corresponding author).
sRNA is an effective tool for synthesizing and regulating target genes in E. coli, but it has been difficult to apply to industrially useful Gram-positive bacteria such as Bacillus subtilis and Corynebacterium in addition to Gram-negative bacteria such as E. coli.
To address this issue, a research team led by Distinguished Professor Lee Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST developed a new sRNA platform that can effectively suppress target genes in various bacteria, including both Gram-negative and positive bacteria. The research team surveyed thousands of microbial-derived sRNA systems in the microbial database, and eventually designated the sRNA system derived from 'Bacillus subtilis' that showed the highest gene knockdown efficiency, and designated it as “Broad-Host-Range sRNA”, or BHR-sRNA.
A similar well-known system is the CRISPR interference (CRISPRi) system, which is a modified CRISPR system that knocks down gene expression by suppressing the gene transcription process. However, the Cas9 protein in the CRISPRi system has a very high molecular weight, and there have been reports growth inhibition in bacteria. The BHR-sRNA system developed in this study did not affect bacterial growth while showing similar gene knockdown efficiencies to CRISPRi.
< Figure 1. a) Schematic illustration demonstrating the mechanism of syntetic sRNA b) Phylogenetic tree of the 16 Gram-negative and Gram-positive bacterial species tested for gene knockdown by the BHR-sRNA system. >
To validate the versatility of the BHR-sRNA system, 16 different gram-negative and gram-positive bacteria were selected and tested, where the BHR-sRNA system worked successfully in 15 of them. In addition, it was demonstrated that the gene knockdown capability was more effective than that of the existing E. coli-based sRNA system in 10 bacteria. The BHR-sRNA system proved to be a universal tool capable of effectively inhibiting gene expression in various bacteria.
In order to address the problem of antibiotic-resistant pathogens that have recently become more serious, the BHR-sRNA was demonstrated to suppress the pathogenicity by suppressing the gene producing the virulence factor. By using BHR-sRNA, biofilm formation, one of the factors resulting in antibiotic resistance, was inhibited by 73% in Staphylococcus epidermidis a pathogen that can cause hospital-acquired infections. Antibiotic resistance was also weakened by 58% in the pneumonia causing bacteria Klebsiella pneumoniae. In addition, BHR-sRNA was applied to industrial bacteria to develop microbial cell factories to produce high value-added chemicals with better production performance. Notably, superior industrial strains were constructed with the aid of BHR-sRNA to produce the following chemicals: valerolactam, a raw material for polyamide polymers, methyl-anthranilate, a grape-flavor food additive, and indigoidine, a blue-toned natural dye.
The BHR-sRNA developed through this study will help expedite the commercialization of bioprocesses to produce high value-added compounds and materials such as artificial meat, jet fuel, health supplements, pharmaceuticals, and plastics. It is also anticipated that to help eradicating antibiotic-resistant pathogens in preparation for another upcoming pandemic. “In the past, we could only develop new tools for gene knockdown for each bacterium, but now we have developed a tool that works for a variety of bacteria” said Distinguished Professor Sang Yup Lee.
This work was supported by the Development of Next-generation Biorefinery Platform Technologies for Leading Bio-based Chemicals Industry Project and the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project from NRF supported by the Korean MSIT.
2023.05.10 View 3350
Synthetic sRNAs to knockdown genes in medical and industrial bacteria
Bacteria are intimately involved in our daily lives. These microorganisms have been used in human history for food such as cheese, yogurt, and wine, In more recent years, through metabolic engineering, microorganisms been used extensively as microbial cell factories to manufacture plastics, feed for livestock, dietary supplements, and drugs. However, in addition to these bacteria that are beneficial to human lives, pathogens such as Pneumonia, Salmonella, and Staphylococcus that cause various infectious diseases are also ubiquitously present. It is important to be able to metabolically control these beneficial industrial bacteria for high value-added chemicals production and to manipulate harmful pathogens to suppress its pathogenic traits.
KAIST (President Kwang Hyung Lee) announced on the 10th that a research team led by Distinguished Professor Sang Yup Lee of the Department of Biochemical Engineering has developed a new sRNA tool that can effectively inhibit target genes in various bacteria, including both Gram-negative and Gram-positive bacteria. The research results were published online on April 24 in Nature Communications.
※ Thesis title: Targeted and high-throughput gene knockdown in diverse bacteria using synthetic sRNAs
※ Author information : Jae Sung Cho (co-1st), Dongsoo Yang (co-1st), Cindy Pricilia Surya Prabowo (co-author), Mohammad Rifqi Ghiffary (co-author), Taehee Han (co-author), Kyeong Rok Choi (co-author), Cheon Woo Moon (co-author), Hengrui Zhou (co-author), Jae Yong Ryu (co-author), Hyun Uk Kim (co-author) and Sang Yup Lee (corresponding author).
sRNA is an effective tool for synthesizing and regulating target genes in E. coli, but it has been difficult to apply to industrially useful Gram-positive bacteria such as Bacillus subtilis and Corynebacterium in addition to Gram-negative bacteria such as E. coli.
To address this issue, a research team led by Distinguished Professor Lee Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST developed a new sRNA platform that can effectively suppress target genes in various bacteria, including both Gram-negative and positive bacteria. The research team surveyed thousands of microbial-derived sRNA systems in the microbial database, and eventually designated the sRNA system derived from 'Bacillus subtilis' that showed the highest gene knockdown efficiency, and designated it as “Broad-Host-Range sRNA”, or BHR-sRNA.
A similar well-known system is the CRISPR interference (CRISPRi) system, which is a modified CRISPR system that knocks down gene expression by suppressing the gene transcription process. However, the Cas9 protein in the CRISPRi system has a very high molecular weight, and there have been reports growth inhibition in bacteria. The BHR-sRNA system developed in this study did not affect bacterial growth while showing similar gene knockdown efficiencies to CRISPRi.
< Figure 1. a) Schematic illustration demonstrating the mechanism of syntetic sRNA b) Phylogenetic tree of the 16 Gram-negative and Gram-positive bacterial species tested for gene knockdown by the BHR-sRNA system. >
To validate the versatility of the BHR-sRNA system, 16 different gram-negative and gram-positive bacteria were selected and tested, where the BHR-sRNA system worked successfully in 15 of them. In addition, it was demonstrated that the gene knockdown capability was more effective than that of the existing E. coli-based sRNA system in 10 bacteria. The BHR-sRNA system proved to be a universal tool capable of effectively inhibiting gene expression in various bacteria.
In order to address the problem of antibiotic-resistant pathogens that have recently become more serious, the BHR-sRNA was demonstrated to suppress the pathogenicity by suppressing the gene producing the virulence factor. By using BHR-sRNA, biofilm formation, one of the factors resulting in antibiotic resistance, was inhibited by 73% in Staphylococcus epidermidis a pathogen that can cause hospital-acquired infections. Antibiotic resistance was also weakened by 58% in the pneumonia causing bacteria Klebsiella pneumoniae. In addition, BHR-sRNA was applied to industrial bacteria to develop microbial cell factories to produce high value-added chemicals with better production performance. Notably, superior industrial strains were constructed with the aid of BHR-sRNA to produce the following chemicals: valerolactam, a raw material for polyamide polymers, methyl-anthranilate, a grape-flavor food additive, and indigoidine, a blue-toned natural dye.
The BHR-sRNA developed through this study will help expedite the commercialization of bioprocesses to produce high value-added compounds and materials such as artificial meat, jet fuel, health supplements, pharmaceuticals, and plastics. It is also anticipated that to help eradicating antibiotic-resistant pathogens in preparation for another upcoming pandemic. “In the past, we could only develop new tools for gene knockdown for each bacterium, but now we have developed a tool that works for a variety of bacteria” said Distinguished Professor Sang Yup Lee.
This work was supported by the Development of Next-generation Biorefinery Platform Technologies for Leading Bio-based Chemicals Industry Project and the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project from NRF supported by the Korean MSIT.
2023.05.10 View 3350 -
 Seanie Lee of KAIST Kim Jaechul Graduate School of AI, named the 2023 Apple Scholars in AI Machine Learning
Seanie Lee, a Ph.D. candidate at the Kim Jaechul Graduate School of AI, has been selected as one of the Apple Scholars in AI/ML PhD fellowship program recipients for 2023. Lee, advised by Sung Ju Hwang and Juho Lee, is a rising star in AI.
< Seanie Lee of KAIST Kim Jaechul Graduate School of AI >
The Apple Scholars in AI/ML PhD fellowship program, launched in 2020, aims to discover and support young researchers with a promising future in computer science. Each year, a handful of graduate students in related fields worldwide are selected for the program. For the following two years, the selected students are provided with financial support for research, international conference attendance, internship opportunities, and mentorship by an Apple engineer.
This year, 22 PhD students were selected from leading universities worldwide, including Johns Hopkins University, MIT, Stanford University, Imperial College London, Edinburgh University, Tsinghua University, HKUST, and Technion. Seanie Lee is the first Korean student to be selected for the program.
Lee’s research focuses on transfer learning, a subfield of AI that reuses pre-trained AI models on large datasets such as images or text corpora to train them for new purposes.
(*text corpus: a collection of text resources in computer-readable forms)
His work aims to improve the performance of transfer learning by developing new data augmentation methods that allow for more effective training using few training data samples and new regularization techniques that prevent the overfitting of large AI models to training data. He has published 11 papers, all of which were accepted to top-tier conferences such as the Annual Meeting of the Association for Computational Linguistics (ACL), International Conference on Learning Representations (ICLR), and Annual Conference on Neural Information Processing Systems (NeurIPS).
“Being selected as one of the Apple Scholars in AI/ML PhD fellowship program is a great motivation for me,” said Lee. “So far, AI research has been largely focused on computer vision and natural language processing, but I want to push the boundaries now and use modern tools of AI to solve problems in natural science, like physics.”
2023.04.20 View 3388
Seanie Lee of KAIST Kim Jaechul Graduate School of AI, named the 2023 Apple Scholars in AI Machine Learning
Seanie Lee, a Ph.D. candidate at the Kim Jaechul Graduate School of AI, has been selected as one of the Apple Scholars in AI/ML PhD fellowship program recipients for 2023. Lee, advised by Sung Ju Hwang and Juho Lee, is a rising star in AI.
< Seanie Lee of KAIST Kim Jaechul Graduate School of AI >
The Apple Scholars in AI/ML PhD fellowship program, launched in 2020, aims to discover and support young researchers with a promising future in computer science. Each year, a handful of graduate students in related fields worldwide are selected for the program. For the following two years, the selected students are provided with financial support for research, international conference attendance, internship opportunities, and mentorship by an Apple engineer.
This year, 22 PhD students were selected from leading universities worldwide, including Johns Hopkins University, MIT, Stanford University, Imperial College London, Edinburgh University, Tsinghua University, HKUST, and Technion. Seanie Lee is the first Korean student to be selected for the program.
Lee’s research focuses on transfer learning, a subfield of AI that reuses pre-trained AI models on large datasets such as images or text corpora to train them for new purposes.
(*text corpus: a collection of text resources in computer-readable forms)
His work aims to improve the performance of transfer learning by developing new data augmentation methods that allow for more effective training using few training data samples and new regularization techniques that prevent the overfitting of large AI models to training data. He has published 11 papers, all of which were accepted to top-tier conferences such as the Annual Meeting of the Association for Computational Linguistics (ACL), International Conference on Learning Representations (ICLR), and Annual Conference on Neural Information Processing Systems (NeurIPS).
“Being selected as one of the Apple Scholars in AI/ML PhD fellowship program is a great motivation for me,” said Lee. “So far, AI research has been largely focused on computer vision and natural language processing, but I want to push the boundaries now and use modern tools of AI to solve problems in natural science, like physics.”
2023.04.20 View 3388 -
 KAIST Team Develops Highly-Sensitive Wearable Piezoelectric Blood Pressure Sensor for Continuous Health Monitoring
- A collaborative research team led by KAIST Professor Keon Jae Lee verifies the accuracy of the highly-sensitive sensor through clinical trials
- Commercialization of the watch and patch-type sensor is in progress
A KAIST research team led by Professor Keon Jae Lee from the Department of Materials Science and Engineering and the College of Medicine of the Catholic University of Korea has developed a highly sensitive, wearable piezoelectric blood pressure sensor.
Blood pressure is a critical indicator for assessing general health and predicting stroke or heart failure. In particular, cardiovascular disease is the leading cause of global death, therefore, periodic measurement of blood pressure is crucial for personal healthcare.
Recently, there has been a growing interest in healthcare devices for continuous blood pressure monitoring. Although smart watches using LED-based photoplethysmography (PPG) technology have been on market, these devices have been limited by the accuracy constraints of optical sensors, making it hard to meet the international standards of automatic sphygmomanometers.
Professor Lee’s team has developed the wearable piezoelectric blood pressure sensor by transferring a highly sensitive, inorganic piezoelectric membrane from bulk sapphire substrates to flexible substrates. Ultrathin piezoelectric sensors with a thickness of several micrometers (one hundredth of the human hair) exhibit conformal contact with the skin to successfully collect accurate blood pressure from the subtle pulsation of the blood vessels.
Clinical trial at the St. Mary’s Hospital of the Catholic University validated the accuracy of blood pressure sensor at par with international standard with errors within ±5 mmHg and a standard deviation under 8 mmHg for both systolic and diastolic blood pressure. In addition, the research team successfully embedded the sensor on a watch-type product to enable continuous monitoring of blood pressure.
Prof. Keon Jae Lee said, “Major target of our healthcare devices is hypertensive patients for their daily medical check-up. We plan to develop a comfortable patch-type sensor to monitor blood pressure during sleep and have a start-up company commercialize these watch and patch-type products soon.”
This result titled “Clinical validation of wearable piezoelectric blood pressure sensor for health monitoring” was published in the online issue of Advanced Materials on March 24th, 2023. (DOI: 10.1002/adma.202301627)
Figure 1. Schematic illustration of the overall concept for a wearable piezoelectric blood pressure sensor (WPBPS).
Figure 2. Wearable piezoelectric blood pressure sensor (WPBPS) mounted on a watch (a) Schematic design of the WPBPS-embedded wristwatch. (b) Block diagram of the wireless communication circuit, which filters, amplifies, and transmits wireless data to portable devices. (c) Pulse waveforms transmitted from the wristwatch to the portable device by the wireless communication circuit. The inset shows a photograph of monitoring a user’s beat-to-beat pulses and their corresponding BP values in real time using the developed WPBPS-mounted wristwatch.
2023.04.17 View 3636
KAIST Team Develops Highly-Sensitive Wearable Piezoelectric Blood Pressure Sensor for Continuous Health Monitoring
- A collaborative research team led by KAIST Professor Keon Jae Lee verifies the accuracy of the highly-sensitive sensor through clinical trials
- Commercialization of the watch and patch-type sensor is in progress
A KAIST research team led by Professor Keon Jae Lee from the Department of Materials Science and Engineering and the College of Medicine of the Catholic University of Korea has developed a highly sensitive, wearable piezoelectric blood pressure sensor.
Blood pressure is a critical indicator for assessing general health and predicting stroke or heart failure. In particular, cardiovascular disease is the leading cause of global death, therefore, periodic measurement of blood pressure is crucial for personal healthcare.
Recently, there has been a growing interest in healthcare devices for continuous blood pressure monitoring. Although smart watches using LED-based photoplethysmography (PPG) technology have been on market, these devices have been limited by the accuracy constraints of optical sensors, making it hard to meet the international standards of automatic sphygmomanometers.
Professor Lee’s team has developed the wearable piezoelectric blood pressure sensor by transferring a highly sensitive, inorganic piezoelectric membrane from bulk sapphire substrates to flexible substrates. Ultrathin piezoelectric sensors with a thickness of several micrometers (one hundredth of the human hair) exhibit conformal contact with the skin to successfully collect accurate blood pressure from the subtle pulsation of the blood vessels.
Clinical trial at the St. Mary’s Hospital of the Catholic University validated the accuracy of blood pressure sensor at par with international standard with errors within ±5 mmHg and a standard deviation under 8 mmHg for both systolic and diastolic blood pressure. In addition, the research team successfully embedded the sensor on a watch-type product to enable continuous monitoring of blood pressure.
Prof. Keon Jae Lee said, “Major target of our healthcare devices is hypertensive patients for their daily medical check-up. We plan to develop a comfortable patch-type sensor to monitor blood pressure during sleep and have a start-up company commercialize these watch and patch-type products soon.”
This result titled “Clinical validation of wearable piezoelectric blood pressure sensor for health monitoring” was published in the online issue of Advanced Materials on March 24th, 2023. (DOI: 10.1002/adma.202301627)
Figure 1. Schematic illustration of the overall concept for a wearable piezoelectric blood pressure sensor (WPBPS).
Figure 2. Wearable piezoelectric blood pressure sensor (WPBPS) mounted on a watch (a) Schematic design of the WPBPS-embedded wristwatch. (b) Block diagram of the wireless communication circuit, which filters, amplifies, and transmits wireless data to portable devices. (c) Pulse waveforms transmitted from the wristwatch to the portable device by the wireless communication circuit. The inset shows a photograph of monitoring a user’s beat-to-beat pulses and their corresponding BP values in real time using the developed WPBPS-mounted wristwatch.
2023.04.17 View 3636 -
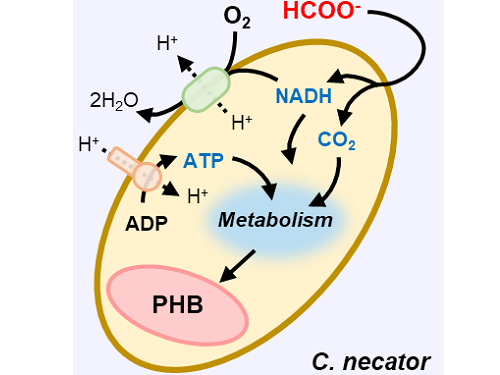 A biohybrid system to extract 20 times more bioplastic from CO2 developed by KAIST researchers
As the issues surrounding global climate change intensify, more attention and determined efforts are required to re-grasp the issue as a state of “crisis” and respond to it properly. Among the various methods of recycling CO2, the electrochemical CO2 conversion technology is a technology that can convert CO2 into useful chemical substances using electrical energy. Since it is easy to operate facilities and can use the electricity from renewable sources like the solar cells or the wind power, it has received a lot of attention as an eco-friendly technology can contribute to reducing greenhouse gases and achieve carbon neutrality.
KAIST (President Kwang Hyung Lee) announced on the 30th that the joint research team led by Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering succeeded in developing a technology that produces bioplastics from CO2 with high efficiency by developing a hybrid system that interlinked the electrochemical CO2 conversion and microbial bio conversion methods together. The results of the research, which showed the world's highest productivity by more than 20 times compared to similar systems, were published online on March 27th in the "Proceedings of the National Academy of Sciences (PNAS)".
※ Paper title: Biohybrid CO2 electrolysis for the direct synthesis of polyesters from CO2
※ Author information: Jinkyu Lim (currently at Stanford Linear Accelerator Center, co-first author), So Young Choi (KAIST, co-first author), Jae Won Lee (KAIST, co-first author), Hyunjoo Lee (KAIST, corresponding author), Sang Yup Lee (KAIST, corresponding author)
For the efficient conversion of CO2, high-efficiency electrode catalysts and systems are actively being developed. As conversion products, only compounds containing one or up to three carbon atoms are produced on a limited basis. Compounds of one carbon, such as CO, formic acid, and ethylene, are produced with relatively high efficiency. Liquid compounds of several carbons, such as ethanol, acetic acid, and propanol, can also be produced by these systems, but due to the nature of the chemical reaction that requires more electrons, there are limitations involving the conversion efficiency and the product selection.
Accordingly, a joint research team led by Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST developed a technology to produce bioplastics from CO2 by linking electrochemical conversion technology with bioconversion method that uses microorganisms.
This electrochemical-bio hybrid system is in the form of having an electrolyzer, in which electrochemical conversion reactions occur, connected to a fermenter, in which microorganisms are cultured. When CO2 is converted to formic acid in the electrolyzer, and it is fed into the fermenter in which the microbes like the Cupriavidus necator, in this case, consumes the carbon source to produce polyhydroxyalkanoate (PHA), a microbial-derived bioplastic.
According to the research results of the existing hybrid concepts, there was a disadvantage of having low productivity or stopping at a non-continuous process due to problems of low efficiency of the electrolysis and irregular results arising from the culturing conditions of the microbes.
In order to overcome these problems, the joint research team made formic acid with a gas diffusion electrode using gaseous CO2. In addition, the team developed a 'physiologically compatible catholyte' that can be used as a culture medium for microorganisms as well as an electrolyte that allows the electrolysis to occur sufficiently without inhibiting the growth of microorganisms, without having to have a additional separation and purification process, which allowed the acide to be supplied directly to microorganisms.
Through this, the electrolyte solution containing formic acid made from CO2 enters the fermentation tank, is used for microbial culture, and enters the electrolyzer to be circulated, maximizing the utilization of the electrolyte solution and remaining formic acid. In addition, a filter was installed to ensure that only the electrolyte solution with any and all microorganisms that can affect the electrosis filtered out is supplied back to the electrolyzer, and that the microorganisms exist only in the fermenter, designing the two system to work well together with utmost efficiency.
Through the developed hybrid system, the produced bioplastic, poly-3-hydroxybutyrate (PHB), of up to 83% of the cell dry weight was produced from CO2, which produced 1.38g of PHB from a 4 cm2 electrode, which is the world's first gram(g) level production and is more than 20 times more productive than previous research. In addition, the hybrid system is expected to be applied to various industrial processes in the future as it shows promises of the continuous culture system.
The corresponding authors, Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee noted that “The results of this research are technologies that can be applied to the production of various chemical substances as well as bioplastics, and are expected to be used as key parts needed in achieving carbon neutrality in the future.”
This research was received and performed with the supports from the CO2 Reduction Catalyst and Energy Device Technology Development Project, the Heterogeneous Atomic Catalyst Control Project, and the Next-generation Biorefinery Source Technology Development Project to lead the Biochemical Industry of the Oil-replacement Eco-friendly Chemical Technology Development Program by the Ministry of Science and ICT.
Figure 1. Schematic diagram and photo of the biohybrid CO2 electrolysis system.
(A) A conceptual scheme and (B) a photograph of the biohybrid CO2 electrolysis system. (C) A detailed scheme of reaction inside the system. Gaseous CO2 was converted to formate in the electrolyzer, and the formate was converted to PHB by the cells in the fermenter. The catholyte was developed so that it is compatible with both CO2 electrolysis and fermentation and was continuously circulated.
2023.03.30 View 4871
A biohybrid system to extract 20 times more bioplastic from CO2 developed by KAIST researchers
As the issues surrounding global climate change intensify, more attention and determined efforts are required to re-grasp the issue as a state of “crisis” and respond to it properly. Among the various methods of recycling CO2, the electrochemical CO2 conversion technology is a technology that can convert CO2 into useful chemical substances using electrical energy. Since it is easy to operate facilities and can use the electricity from renewable sources like the solar cells or the wind power, it has received a lot of attention as an eco-friendly technology can contribute to reducing greenhouse gases and achieve carbon neutrality.
KAIST (President Kwang Hyung Lee) announced on the 30th that the joint research team led by Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering succeeded in developing a technology that produces bioplastics from CO2 with high efficiency by developing a hybrid system that interlinked the electrochemical CO2 conversion and microbial bio conversion methods together. The results of the research, which showed the world's highest productivity by more than 20 times compared to similar systems, were published online on March 27th in the "Proceedings of the National Academy of Sciences (PNAS)".
※ Paper title: Biohybrid CO2 electrolysis for the direct synthesis of polyesters from CO2
※ Author information: Jinkyu Lim (currently at Stanford Linear Accelerator Center, co-first author), So Young Choi (KAIST, co-first author), Jae Won Lee (KAIST, co-first author), Hyunjoo Lee (KAIST, corresponding author), Sang Yup Lee (KAIST, corresponding author)
For the efficient conversion of CO2, high-efficiency electrode catalysts and systems are actively being developed. As conversion products, only compounds containing one or up to three carbon atoms are produced on a limited basis. Compounds of one carbon, such as CO, formic acid, and ethylene, are produced with relatively high efficiency. Liquid compounds of several carbons, such as ethanol, acetic acid, and propanol, can also be produced by these systems, but due to the nature of the chemical reaction that requires more electrons, there are limitations involving the conversion efficiency and the product selection.
Accordingly, a joint research team led by Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST developed a technology to produce bioplastics from CO2 by linking electrochemical conversion technology with bioconversion method that uses microorganisms.
This electrochemical-bio hybrid system is in the form of having an electrolyzer, in which electrochemical conversion reactions occur, connected to a fermenter, in which microorganisms are cultured. When CO2 is converted to formic acid in the electrolyzer, and it is fed into the fermenter in which the microbes like the Cupriavidus necator, in this case, consumes the carbon source to produce polyhydroxyalkanoate (PHA), a microbial-derived bioplastic.
According to the research results of the existing hybrid concepts, there was a disadvantage of having low productivity or stopping at a non-continuous process due to problems of low efficiency of the electrolysis and irregular results arising from the culturing conditions of the microbes.
In order to overcome these problems, the joint research team made formic acid with a gas diffusion electrode using gaseous CO2. In addition, the team developed a 'physiologically compatible catholyte' that can be used as a culture medium for microorganisms as well as an electrolyte that allows the electrolysis to occur sufficiently without inhibiting the growth of microorganisms, without having to have a additional separation and purification process, which allowed the acide to be supplied directly to microorganisms.
Through this, the electrolyte solution containing formic acid made from CO2 enters the fermentation tank, is used for microbial culture, and enters the electrolyzer to be circulated, maximizing the utilization of the electrolyte solution and remaining formic acid. In addition, a filter was installed to ensure that only the electrolyte solution with any and all microorganisms that can affect the electrosis filtered out is supplied back to the electrolyzer, and that the microorganisms exist only in the fermenter, designing the two system to work well together with utmost efficiency.
Through the developed hybrid system, the produced bioplastic, poly-3-hydroxybutyrate (PHB), of up to 83% of the cell dry weight was produced from CO2, which produced 1.38g of PHB from a 4 cm2 electrode, which is the world's first gram(g) level production and is more than 20 times more productive than previous research. In addition, the hybrid system is expected to be applied to various industrial processes in the future as it shows promises of the continuous culture system.
The corresponding authors, Professor Hyunjoo Lee and Distinguished Professor Sang Yup Lee noted that “The results of this research are technologies that can be applied to the production of various chemical substances as well as bioplastics, and are expected to be used as key parts needed in achieving carbon neutrality in the future.”
This research was received and performed with the supports from the CO2 Reduction Catalyst and Energy Device Technology Development Project, the Heterogeneous Atomic Catalyst Control Project, and the Next-generation Biorefinery Source Technology Development Project to lead the Biochemical Industry of the Oil-replacement Eco-friendly Chemical Technology Development Program by the Ministry of Science and ICT.
Figure 1. Schematic diagram and photo of the biohybrid CO2 electrolysis system.
(A) A conceptual scheme and (B) a photograph of the biohybrid CO2 electrolysis system. (C) A detailed scheme of reaction inside the system. Gaseous CO2 was converted to formate in the electrolyzer, and the formate was converted to PHB by the cells in the fermenter. The catholyte was developed so that it is compatible with both CO2 electrolysis and fermentation and was continuously circulated.
2023.03.30 View 4871