-
 인프라 없어도 치매 환자 신속히 찾을 수 있어요
무선랜이나 블루투스와 같은 무선신호 인프라가 설치되지 않은 건설 현장과 공장 건물에서도 동작하고, 어린이나 치매 노인을 찾아낼 수 있는 실내외 통합 GPS 시스템을 우리 연구진이 개발해 화제다.
우리 대학 전산학부 지능형 서비스통합 연구실 한동수 교수 연구팀이 전 세계 모든 건물에서 위치 서비스를 제공할 수 있는 ‘범용 실내외 통합 GPS 시스템’을 개발했다고 12일 밝혔다.
이번에 개발된 범용 실내외 통합 GPS 시스템인 카이로스(KAILOS, KAIST LOcating System)는 서비스 범위를 소수의 특정된 건물에서 벗어나 전 세계 모든 건물로 확장했다. 위치 인프라 제약에서도 벗어나 앞으로는 무선 신호가 부재한 건물에서도 구동되는, 소위 범용적인 실내외 통합 GPS 위치인식 서비스가 가능해질 전망이다.
연구팀은 실내외 전환 탐지 AI 기법과 건물 출입구를 탐지하는 AI 기법을 통합시킨 센서퓨전 위치인식 기법을 개발했다. 이 기법들은 건물 출입구 탐지, 층 탐지, 계단/엘리베이터와 같은 랜드마크 탐지 기법이 보행자 항법 기법(PDR)과 연계돼 작동한다.
구체적으로 연구팀은 GPS 신호와 관성센서에서 얻어지는 신호를 복합적으로 활용해 사용자가 진입하는 건물을 판별하고 건물에 진입하는 시점과 위치를 실시간에 탐지하는 기법을 개발했다. 건물 내에서는 기압과 관성센서를 활용해 계단/엘리베이터를 이용한 수직 이동을 탐지하고 기압 정보를 활용해 층을 탐지하는 기법도 개발했다.
한편 연구팀은 GPS, 와이파이(WiFi), 블루투스 신호 칩과 관성센서, 기압 센서, 지자기 센서, 조도 센서를 통합시킨 위치 전용 사물인터넷(IoT) 태그도 제작했다. 개발된 태그에 장착된 GPS 센서는 위성에서 직접 수신되는 L1 신호뿐 아니라 건물에 반사되는 L5 신호도 처리해 도심 협곡에서도 높은 정확도를 달성할 수 있다.
이제 위치 태그만 있으면 LTE 신호가 제공되는 전 세계 어느 건물에서도 실내외 구분 없이 위치를 추정하고, 추정된 위치에 기반한 다양한 실내외 통합 위치기반 응용 서비스를 개발할 수 있다. 사물인터넷(IoT) 태그의 배터리 소요에 있어서는 위치 서비스 주기에 따라 달라질 수 있지만 실시간 서비스 조건이 완화된 환경에서는 배터리 충전 없이 수일 동안 서비스를 제공할 수 있음을 확인했다.
연구팀은 스마트폰을 위치 단말로 사용하는 스마트폰에서 구동되는 실내외 통합 GPS 앱도 함께 개발했다. 개발된 앱은 위치기반 안전, 편의, 엔터테인먼트와 같은 응용 분야에서 널리 사용되면 연구팀이 보유하고 있는 ‘크라우드소싱 무선 라디오맵 구축 자동화 기법’과 접목해 도시 혹은 국가 수준의 정밀한 무선 라디오맵 구축도 가능해질 전망이다. 향후 도시 및 국가 수준의 라디오맵이 구축되면 신뢰도 높고 정확한 실내외 통합 GPS 서비스를 할 수 있다.
연구팀을 이끄는 전산학부 한동수 교수는 “이번에 업그레이드된 카이로스(KAILOS) 실내외 통합 GPS 시스템은 위치 인프라가 설치되지 않은 건설 현장과 공장 건물에서 개발된 시스템의 기능과 성능을 평가하는 6차례의 개념 증명(Proof of Concept, PoC) 과정도 수행해 상용화 가능성을 입증했다”며, “또한 어린이나 치매 노인 보호를 위해 실내외 통합 GPS 위치 태그를 신발에 장착하려는 요구가 있다. 건설 현장, 그리고 조선소, 제철소와 같은 공장 작업자의 안전을 위치에 기반해 관리하려는 시도도 있다. 이번에 개발한 시스템은 이런 상황에 적용이 쉬우며, 소방관이나 경찰의 도움이 필요한 구조요청에도 신속하게 대응할 수 있다”고 말했다.
이번에 개발된 실내외 통합 GPS 시스템은 2022년 개발이 시작된 한국형 GPS 시스템(KPS)의 서비스 영역을 실내로 확장하는 데도 활용될 것으로 기대된다.
한편 이번 연구는 방위사업청의 재원을 받아 국방과학연구소의 지원(미래도전 국방기술 연구개발사업)으로 수행됐다.
인프라 없어도 치매 환자 신속히 찾을 수 있어요
무선랜이나 블루투스와 같은 무선신호 인프라가 설치되지 않은 건설 현장과 공장 건물에서도 동작하고, 어린이나 치매 노인을 찾아낼 수 있는 실내외 통합 GPS 시스템을 우리 연구진이 개발해 화제다.
우리 대학 전산학부 지능형 서비스통합 연구실 한동수 교수 연구팀이 전 세계 모든 건물에서 위치 서비스를 제공할 수 있는 ‘범용 실내외 통합 GPS 시스템’을 개발했다고 12일 밝혔다.
이번에 개발된 범용 실내외 통합 GPS 시스템인 카이로스(KAILOS, KAIST LOcating System)는 서비스 범위를 소수의 특정된 건물에서 벗어나 전 세계 모든 건물로 확장했다. 위치 인프라 제약에서도 벗어나 앞으로는 무선 신호가 부재한 건물에서도 구동되는, 소위 범용적인 실내외 통합 GPS 위치인식 서비스가 가능해질 전망이다.
연구팀은 실내외 전환 탐지 AI 기법과 건물 출입구를 탐지하는 AI 기법을 통합시킨 센서퓨전 위치인식 기법을 개발했다. 이 기법들은 건물 출입구 탐지, 층 탐지, 계단/엘리베이터와 같은 랜드마크 탐지 기법이 보행자 항법 기법(PDR)과 연계돼 작동한다.
구체적으로 연구팀은 GPS 신호와 관성센서에서 얻어지는 신호를 복합적으로 활용해 사용자가 진입하는 건물을 판별하고 건물에 진입하는 시점과 위치를 실시간에 탐지하는 기법을 개발했다. 건물 내에서는 기압과 관성센서를 활용해 계단/엘리베이터를 이용한 수직 이동을 탐지하고 기압 정보를 활용해 층을 탐지하는 기법도 개발했다.
한편 연구팀은 GPS, 와이파이(WiFi), 블루투스 신호 칩과 관성센서, 기압 센서, 지자기 센서, 조도 센서를 통합시킨 위치 전용 사물인터넷(IoT) 태그도 제작했다. 개발된 태그에 장착된 GPS 센서는 위성에서 직접 수신되는 L1 신호뿐 아니라 건물에 반사되는 L5 신호도 처리해 도심 협곡에서도 높은 정확도를 달성할 수 있다.
이제 위치 태그만 있으면 LTE 신호가 제공되는 전 세계 어느 건물에서도 실내외 구분 없이 위치를 추정하고, 추정된 위치에 기반한 다양한 실내외 통합 위치기반 응용 서비스를 개발할 수 있다. 사물인터넷(IoT) 태그의 배터리 소요에 있어서는 위치 서비스 주기에 따라 달라질 수 있지만 실시간 서비스 조건이 완화된 환경에서는 배터리 충전 없이 수일 동안 서비스를 제공할 수 있음을 확인했다.
연구팀은 스마트폰을 위치 단말로 사용하는 스마트폰에서 구동되는 실내외 통합 GPS 앱도 함께 개발했다. 개발된 앱은 위치기반 안전, 편의, 엔터테인먼트와 같은 응용 분야에서 널리 사용되면 연구팀이 보유하고 있는 ‘크라우드소싱 무선 라디오맵 구축 자동화 기법’과 접목해 도시 혹은 국가 수준의 정밀한 무선 라디오맵 구축도 가능해질 전망이다. 향후 도시 및 국가 수준의 라디오맵이 구축되면 신뢰도 높고 정확한 실내외 통합 GPS 서비스를 할 수 있다.
연구팀을 이끄는 전산학부 한동수 교수는 “이번에 업그레이드된 카이로스(KAILOS) 실내외 통합 GPS 시스템은 위치 인프라가 설치되지 않은 건설 현장과 공장 건물에서 개발된 시스템의 기능과 성능을 평가하는 6차례의 개념 증명(Proof of Concept, PoC) 과정도 수행해 상용화 가능성을 입증했다”며, “또한 어린이나 치매 노인 보호를 위해 실내외 통합 GPS 위치 태그를 신발에 장착하려는 요구가 있다. 건설 현장, 그리고 조선소, 제철소와 같은 공장 작업자의 안전을 위치에 기반해 관리하려는 시도도 있다. 이번에 개발한 시스템은 이런 상황에 적용이 쉬우며, 소방관이나 경찰의 도움이 필요한 구조요청에도 신속하게 대응할 수 있다”고 말했다.
이번에 개발된 실내외 통합 GPS 시스템은 2022년 개발이 시작된 한국형 GPS 시스템(KPS)의 서비스 영역을 실내로 확장하는 데도 활용될 것으로 기대된다.
한편 이번 연구는 방위사업청의 재원을 받아 국방과학연구소의 지원(미래도전 국방기술 연구개발사업)으로 수행됐다.
2024.08.12
조회수 4280
-
 차세대 우주-지상간 통신 및 초정밀 시간 안정화 기술 개발
GPS 위성간 시간 동기화로 네비게이션 위치 측정 정밀도를 높일수 있는 등 초정밀 시간 표준의 상호 비교/검증을 위해, 2012년 독일 표준연구원과 막스플랑크 양자광학연구소는 광섬유를 이용한 광시계를 비교 연구하였으나, 이는 광섬유 매설구간 활용으로 인해 공간적 제약이 있어, 최근 활발해지는 시간표준의 비교/전송 연구와 다양한 표준 주파수 응용기술에 대응하는 데 큰 어려움이 있어 왔다.
우리 대학 기계공학과 김승우, 김영진 교수 공동연구팀은 대기 중으로 광신호를 전송하여 공간의 제약을 뛰어넘는 차세대 우주-지상 간 광-시간 동기화의 원천 기술인, 대기를 통한 광주파수 전송 및 펨토초 레이저 안정화* 기술을 개발했다고 5일 밝혔다.
*펨토초 레이저 광 빗: 시간/주파수 표준으로 활용할 수 있는 광대역(수백만 개의 주파수의 중첩) 레이저, 빛의 스펙트럼이 머리빗과 닮았다 하여 붙여진 이름이다.
시간은 모든 물리량 중에서 가장 기본이 되는 물리단위로 다양한 물리단위를 정의하는 데 활용되기 때문에 우수한 시간 표준을 개발하는 것은 차세대 우주 규모의 측정 분야에서 다양한 물리량을 정확하고 정밀하게 측정을 가능케 한다.
이를 위해 먼저 연구팀은 1/1,000,000,000,000,000(천조분의 일) 초에 해당하는 시간 폭을 가지는 매우 정밀한 펨토초 레이저 광 빗에 기반한 시간 표준을 개발했다. 하지만 개발에만 수년이 걸리고, 시스템적으로 큰 노력이 들어가는 시간 표준의 개발을 효과적으로 활용하기 위해서 연구팀은 안정화된 레이저의 전송을 통해 다양한 환경에서 시간 표준을 효과적이고 효율적으로 활용할 수 있는 연구에 집중해 왔다.
대기를 통해 전송받은 레이저를 펨토초 레이저 광 빗 안정화에 활용해 수백 테라헤르츠(THz) 주파수 영역에서 4 테라헤르츠(THz)의 대역폭에 이르는 안정화 효과를 얻을 수 있었으며, 안정화된 광 빗을 통해 실질적으로 다양한 분야에 이 기술이 활용될 수 있음을 연구팀은 증명했다. 이는 차세대 지상-우주 간 시간 동기화를 통해 다양한 응용연구가 수행될 수 있음을 뜻한다. 아울러, 200~500 GHz의 주파수를 사용하는 차세대 통신 주파수 대역인 6G 실현을 위해서는 핵심 지역에 해당 주파수를 정밀하게 전송하여야만 하는데 이에 활용 가능하다.
기계공학과 양재원 박사가 제1 저자로 참여한 이번 연구는 국제 학술지 `빛: 과학과 응용(Light: Science and Applications)' 8월 12일 字 11권 253호에 출판됐다. (논문명 : Frequency comb-to-comb stabilization over a 1.3-km free-space atmospheric optical link).
연구팀은 대기를 통과하는 레이저의 우수한 시간 표준 특성이 유지될 수 있도록 하는 데 성공했다. 이후 연구팀은 전송된 레이저를 펨토초 레이저 광 빗의 안정화에 적용해 펨토초 레이저가 수 km 떨어진 시간 표준에 해당하는 안정도를 가질 수 있다는 것을 검증했다. 동시에 펨토초 레이저 광 빗을 적용해 다양한 응용연구를 수행할 수 있음을 검증했다.
주저자인 양재원, 이동일 연구원은 "지상-위성 간 광-시간 동기화에 관한 원천기술 개발을 통해 최근 관심이 높아지고 있는 우주의 다양한 측정 응용에 활용할 수 있다는 것을 실질적으로 검증을 수행했다ˮ라고 말했다.
한편 이번 연구는 한국연구재단의 과학기술분야 기초연구사업-개인연구사업- 리더연구(국가과학자)지원을 받아 수행됐다.
차세대 우주-지상간 통신 및 초정밀 시간 안정화 기술 개발
GPS 위성간 시간 동기화로 네비게이션 위치 측정 정밀도를 높일수 있는 등 초정밀 시간 표준의 상호 비교/검증을 위해, 2012년 독일 표준연구원과 막스플랑크 양자광학연구소는 광섬유를 이용한 광시계를 비교 연구하였으나, 이는 광섬유 매설구간 활용으로 인해 공간적 제약이 있어, 최근 활발해지는 시간표준의 비교/전송 연구와 다양한 표준 주파수 응용기술에 대응하는 데 큰 어려움이 있어 왔다.
우리 대학 기계공학과 김승우, 김영진 교수 공동연구팀은 대기 중으로 광신호를 전송하여 공간의 제약을 뛰어넘는 차세대 우주-지상 간 광-시간 동기화의 원천 기술인, 대기를 통한 광주파수 전송 및 펨토초 레이저 안정화* 기술을 개발했다고 5일 밝혔다.
*펨토초 레이저 광 빗: 시간/주파수 표준으로 활용할 수 있는 광대역(수백만 개의 주파수의 중첩) 레이저, 빛의 스펙트럼이 머리빗과 닮았다 하여 붙여진 이름이다.
시간은 모든 물리량 중에서 가장 기본이 되는 물리단위로 다양한 물리단위를 정의하는 데 활용되기 때문에 우수한 시간 표준을 개발하는 것은 차세대 우주 규모의 측정 분야에서 다양한 물리량을 정확하고 정밀하게 측정을 가능케 한다.
이를 위해 먼저 연구팀은 1/1,000,000,000,000,000(천조분의 일) 초에 해당하는 시간 폭을 가지는 매우 정밀한 펨토초 레이저 광 빗에 기반한 시간 표준을 개발했다. 하지만 개발에만 수년이 걸리고, 시스템적으로 큰 노력이 들어가는 시간 표준의 개발을 효과적으로 활용하기 위해서 연구팀은 안정화된 레이저의 전송을 통해 다양한 환경에서 시간 표준을 효과적이고 효율적으로 활용할 수 있는 연구에 집중해 왔다.
대기를 통해 전송받은 레이저를 펨토초 레이저 광 빗 안정화에 활용해 수백 테라헤르츠(THz) 주파수 영역에서 4 테라헤르츠(THz)의 대역폭에 이르는 안정화 효과를 얻을 수 있었으며, 안정화된 광 빗을 통해 실질적으로 다양한 분야에 이 기술이 활용될 수 있음을 연구팀은 증명했다. 이는 차세대 지상-우주 간 시간 동기화를 통해 다양한 응용연구가 수행될 수 있음을 뜻한다. 아울러, 200~500 GHz의 주파수를 사용하는 차세대 통신 주파수 대역인 6G 실현을 위해서는 핵심 지역에 해당 주파수를 정밀하게 전송하여야만 하는데 이에 활용 가능하다.
기계공학과 양재원 박사가 제1 저자로 참여한 이번 연구는 국제 학술지 `빛: 과학과 응용(Light: Science and Applications)' 8월 12일 字 11권 253호에 출판됐다. (논문명 : Frequency comb-to-comb stabilization over a 1.3-km free-space atmospheric optical link).
연구팀은 대기를 통과하는 레이저의 우수한 시간 표준 특성이 유지될 수 있도록 하는 데 성공했다. 이후 연구팀은 전송된 레이저를 펨토초 레이저 광 빗의 안정화에 적용해 펨토초 레이저가 수 km 떨어진 시간 표준에 해당하는 안정도를 가질 수 있다는 것을 검증했다. 동시에 펨토초 레이저 광 빗을 적용해 다양한 응용연구를 수행할 수 있음을 검증했다.
주저자인 양재원, 이동일 연구원은 "지상-위성 간 광-시간 동기화에 관한 원천기술 개발을 통해 최근 관심이 높아지고 있는 우주의 다양한 측정 응용에 활용할 수 있다는 것을 실질적으로 검증을 수행했다ˮ라고 말했다.
한편 이번 연구는 한국연구재단의 과학기술분야 기초연구사업-개인연구사업- 리더연구(국가과학자)지원을 받아 수행됐다.
2022.09.05
조회수 7401
-
 위치인식 기술의 혁신, 인공지능 활용한 실내외 통합 GPS 시스템 개발
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스 통합 연구실)이 실내외 환경 구분 없이 정밀한 위치인식이 가능한 `실내외 통합 GPS 시스템'을 개발했다고 8일 밝혔다.
이번에 개발된 실내외 통합 GPS 시스템은 실외에서는 GPS 신호를 사용해 위치를 추정하고 실내에서는 관성센서, 기압센서, 지자기센서, 조도센서에서 얻어지는 신호를 복합적으로 사용해 위치를 인식한다. 이를 위해 연구팀은 인공지능 기법을 활용한 실내외 탐지, 건물 출입구 탐지, 건물 진입 층 탐지, 계단/엘리베이터 탐지, 층 탐지 기법 등을 개발했다. 아울러 개발된 각종 랜드마크 탐지 기법들을 보행자 항법 기법(PDR)과 연계시킨 소위 센서 퓨전 위치인식 알고리즘도 새롭게 개발했다.
지금까지는 GPS 신호가 도달하지 않는 공간에서는 무선랜 신호나 기지국 신호를 기반으로 위치를 인식하는 것이 보통이었다. 하지만 이번에 개발된 실내외 통합 GPS 시스템은 신호가 존재하지 않고 실내지도가 제공되지 않는 건물에서도 위치인식을 가능하게 하는 최초의 기술이다.
연구팀이 개발한 알고리즘은 구글, 애플의 위치인식 서비스에서는 제공하지 않는 건물 내에서의 정확한 층 정보를 제공할 수 있다. 비전이나 지구 자기장, 무선랜 측위 방식과 달리 사전 준비 작업이 필요치 않은 장점도 있다. 전 세계 어디에서나 사용할 수 있는 범용적인 실내외 통합 GPS 시스템을 구축할 수 있는 기반이 마련됐다.
연구팀은 GPS, 와이파이, 블루투스 신호 수신 칩과 관성센서, 기압센서, 지자기센서, 조도센서 등을 탑재시킨 실내외 통합 GPS 전용 보드도 제작했다. 또한 제작된 하드웨어(HW) 보드에 개발된 센서퓨전 위치인식 알고리즘을 탑재했다. 제작된 실내외 통합 GPS 전용 하드웨어(HW) 보드의 위치인식 정확도를 대전 KAIST 본원 N1 건물에서 측정한 결과, 층 추정에 있어서는 약 95%의 정확도를, 수평 방향으로는 약 3~6미터의 정확도를 달성했다. 실내외 전환에 있어서는 약 0.3초의 전환 속도를 달성했다. 보행자 항법(PDR) 기법을 통합시켰을 때는 1미터 내외의 정확도를 달성하였다.
연구팀은 위치인식 보드가 내장된 태그를 제작하고 박물관, 과학관, 미술관 방문객들을 위한 위치기반 전시 안내 서비스에 적용할 예정이다. 개발된 실내외 통합 GPS 태그는 어린이나 노약자를 보호하는 목적으로도 활용할 수 있으며 소방관 혹은 작업장 작업자의 위치 파악에도 활용할 수 있다. 한편 지하 주차장과 같은 실내로 진입하는 차량의 위치를 추정하는 차량용 센서 퓨전 위치인식 알고리즘과 위치인식 보드도 개발하고 있다.
연구팀은 차량용 실내외 통합 GPS 위치인식 보드가 제작되면 자동차 제조사, 차량 대여 업체들과의 협력을 모색할 예정이며, 스마트폰에 탑재될 센서 퓨전 위치인식 알고리즘도 개발할 예정이다. 개발된 알고리즘이 내장된 실내외 통합 GPS 앱이 개발되면 위치인식 분야에서 다양한 사업화를 모색하는 통신사와의 협력도 가능할 것으로 기대된다.
연구팀을 이끄는 전산학부 한동수 교수는 "무선 신호가 존재하지 않고 실내지도도 주어지지 않는 건물에서 위치인식이 가능한 실내외 통합 GPS 시스템 개발은 이번이 처음이며, 그 응용 분야도 무궁무진하다. 2022년부터 개발이 시작된 한국형 GPS(KPS) 시스템, 한국형 항공위성서비스(Korea Augmentation Satellite System, KASS)와 통합되면 한국이 실내외 통합 GPS 분야에서 선도 국가로 나설 수 있으며 향후 기술 격차를 더 벌릴 수 있도록 실내외 통합 GPS 반도체 칩도 제작할 계획이다ˮ라고 말했다.
또 "개발된 실내외 통합 GPS 태그를 사용한 과학관, 박물관, 미술관 위치기반 안내 서비스는 관람객의 동선 분석에도 유용하게 활용될 수 있다. 전시물 교체를 결정할 때 요구되는 꼭 필요한 유용한 정보다. 국립중앙과학관에 우선 적용될 수 있도록 노력하겠다”라고 말했다.
한편 실내외 통합 GPS 시스템, 그리고 위치기반 관람객 동선 분석 시스템 개발은 과기정통부의 과학문화전시서비스 역량강화지원사업의 지원으로 개발됐다.
위치인식 기술의 혁신, 인공지능 활용한 실내외 통합 GPS 시스템 개발
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스 통합 연구실)이 실내외 환경 구분 없이 정밀한 위치인식이 가능한 `실내외 통합 GPS 시스템'을 개발했다고 8일 밝혔다.
이번에 개발된 실내외 통합 GPS 시스템은 실외에서는 GPS 신호를 사용해 위치를 추정하고 실내에서는 관성센서, 기압센서, 지자기센서, 조도센서에서 얻어지는 신호를 복합적으로 사용해 위치를 인식한다. 이를 위해 연구팀은 인공지능 기법을 활용한 실내외 탐지, 건물 출입구 탐지, 건물 진입 층 탐지, 계단/엘리베이터 탐지, 층 탐지 기법 등을 개발했다. 아울러 개발된 각종 랜드마크 탐지 기법들을 보행자 항법 기법(PDR)과 연계시킨 소위 센서 퓨전 위치인식 알고리즘도 새롭게 개발했다.
지금까지는 GPS 신호가 도달하지 않는 공간에서는 무선랜 신호나 기지국 신호를 기반으로 위치를 인식하는 것이 보통이었다. 하지만 이번에 개발된 실내외 통합 GPS 시스템은 신호가 존재하지 않고 실내지도가 제공되지 않는 건물에서도 위치인식을 가능하게 하는 최초의 기술이다.
연구팀이 개발한 알고리즘은 구글, 애플의 위치인식 서비스에서는 제공하지 않는 건물 내에서의 정확한 층 정보를 제공할 수 있다. 비전이나 지구 자기장, 무선랜 측위 방식과 달리 사전 준비 작업이 필요치 않은 장점도 있다. 전 세계 어디에서나 사용할 수 있는 범용적인 실내외 통합 GPS 시스템을 구축할 수 있는 기반이 마련됐다.
연구팀은 GPS, 와이파이, 블루투스 신호 수신 칩과 관성센서, 기압센서, 지자기센서, 조도센서 등을 탑재시킨 실내외 통합 GPS 전용 보드도 제작했다. 또한 제작된 하드웨어(HW) 보드에 개발된 센서퓨전 위치인식 알고리즘을 탑재했다. 제작된 실내외 통합 GPS 전용 하드웨어(HW) 보드의 위치인식 정확도를 대전 KAIST 본원 N1 건물에서 측정한 결과, 층 추정에 있어서는 약 95%의 정확도를, 수평 방향으로는 약 3~6미터의 정확도를 달성했다. 실내외 전환에 있어서는 약 0.3초의 전환 속도를 달성했다. 보행자 항법(PDR) 기법을 통합시켰을 때는 1미터 내외의 정확도를 달성하였다.
연구팀은 위치인식 보드가 내장된 태그를 제작하고 박물관, 과학관, 미술관 방문객들을 위한 위치기반 전시 안내 서비스에 적용할 예정이다. 개발된 실내외 통합 GPS 태그는 어린이나 노약자를 보호하는 목적으로도 활용할 수 있으며 소방관 혹은 작업장 작업자의 위치 파악에도 활용할 수 있다. 한편 지하 주차장과 같은 실내로 진입하는 차량의 위치를 추정하는 차량용 센서 퓨전 위치인식 알고리즘과 위치인식 보드도 개발하고 있다.
연구팀은 차량용 실내외 통합 GPS 위치인식 보드가 제작되면 자동차 제조사, 차량 대여 업체들과의 협력을 모색할 예정이며, 스마트폰에 탑재될 센서 퓨전 위치인식 알고리즘도 개발할 예정이다. 개발된 알고리즘이 내장된 실내외 통합 GPS 앱이 개발되면 위치인식 분야에서 다양한 사업화를 모색하는 통신사와의 협력도 가능할 것으로 기대된다.
연구팀을 이끄는 전산학부 한동수 교수는 "무선 신호가 존재하지 않고 실내지도도 주어지지 않는 건물에서 위치인식이 가능한 실내외 통합 GPS 시스템 개발은 이번이 처음이며, 그 응용 분야도 무궁무진하다. 2022년부터 개발이 시작된 한국형 GPS(KPS) 시스템, 한국형 항공위성서비스(Korea Augmentation Satellite System, KASS)와 통합되면 한국이 실내외 통합 GPS 분야에서 선도 국가로 나설 수 있으며 향후 기술 격차를 더 벌릴 수 있도록 실내외 통합 GPS 반도체 칩도 제작할 계획이다ˮ라고 말했다.
또 "개발된 실내외 통합 GPS 태그를 사용한 과학관, 박물관, 미술관 위치기반 안내 서비스는 관람객의 동선 분석에도 유용하게 활용될 수 있다. 전시물 교체를 결정할 때 요구되는 꼭 필요한 유용한 정보다. 국립중앙과학관에 우선 적용될 수 있도록 노력하겠다”라고 말했다.
한편 실내외 통합 GPS 시스템, 그리고 위치기반 관람객 동선 분석 시스템 개발은 과기정통부의 과학문화전시서비스 역량강화지원사업의 지원으로 개발됐다.
2022.07.08
조회수 12362
-
 초대규모 그래프 프로세싱 시뮬레이션 기술 개발
우리 대학 연구진이 오늘날 정보통신(IT) 분야에서 광범위하게 사용되는 그래프 타입의 데이터를 실제로 저장하지 않고도 알고리즘을 계산할 수 있는 `그래프 프로세싱 시뮬레이션'이라는 신개념 기술을 세계 최초로 개발하는 데 성공했다. 데이터를 저장할 필요가 없어 1조 개 간선의 초대규모 그래프도 PC 한 대로 처리가 가능하다.
우리 대학 전산학부 김민수 교수 연구팀은 1조 개 간선의 초대규모 그래프에 대해 데이터 저장 없이 알고리즘을 계산할 수 있는 신개념 기술을 세계 최초로 개발했다고 23일 밝혔다.
오늘날 웹, SNS, 인공지능, 블록체인 등의 광범위한 분야들에서 그래프 타입의 데이터에 대한 다양한 알고리즘들의 연구가 매우 중요하다. 그러나 그래프 데이터의 복잡성으로 인해 그 크기가 커질 때 막대한 규모의 컴퓨터 클러스터가 있어야만 알고리즘 계산이 가능하다는 문제가 있다.
김 교수 연구팀은 이를 근본적으로 해결하는 T-GPS(Trillion-scale Graph Processing Simulation)라는 기술을 개발했다. 이 T-GPS 기술은 그래프 데이터를 실제로 디스크에 저장하지 않고도 마치 그래프 데이터가 저장돼 있는 것처럼 알고리즘을 계산할 수 있고, 계산 결과도 실제 저장된 그래프에 대한 알고리즘 계산과 완전히 동일하다는 장점이 있다.
그래프 알고리즘은 그래프 처리 엔진 상에서 개발되고 실행된다. 이는 산업적으로 널리 사용되는 SQL 질의를 데이터베이스 관리 시스템(DBMS) 엔진 상에서 개발하고 실행하는 것과 유사한 방식이다.
지금까지는 그래프 알고리즘을 개발하기 위해 먼저 합성 그래프를 생성 및 저장한 후, 이를 다시 그래프 처리 엔진에서 메모리로 적재해 알고리즘을 계산하는 2단계 방법을 사용했다. 그래프 데이터는 그 복잡성으로 인해 전체를 메모리로 적재하는 것이 요구되며, 그래프의 규모가 커지면 대규모 컴퓨터 클러스터 장비가 있어야만 알고리즘을 개발하고 실행할 수 있다는 커다란 단점이 있었다.
김 교수팀은 합성 그래프와 그래프 처리 엔진 분야에서 국제 최고 권위의 학술대회에 매년 논문을 발표하는 등 세계 최고의 기술력을 보유하고 있으며, 그 기술들을 바탕으로 기존 2단계 방법의 문제를 해결했다.
그래프 데이터상에서 그래프 알고리즘이 계산을 위해 접근하는 부분을 짧은 순간 동안 실시간으로 생성해, 마치 그래프 데이터가 존재하는 것처럼 알고리즘을 계산하는 것이다. 이때 그래프 데이터를 아무렇게 실시간 생성하는 것이 아니라 합성 그래프 모델에 따라 생성하고 저장한 것과 동일하도록 실시간 생성하는 것이 핵심 기술 중 하나다.
또한, 그래프 처리 엔진이 실시간으로 생성되는 그래프를 실제 그래프처럼 인식하고 알고리즘을 완전히 동일하게 계산하도록 엔진을 수정한 것이 또 다른 핵심 기술이다.
김민수 교수 연구팀은 T-GPS 기술을 종래의 2단계 방법과 성능을 비교한 결과, 종래의 2단계 방법이 11대의 컴퓨터로 구성된 클러스터에서 10억 개 간선 규모의 그래프를 계산할 수 있었던 반면, T-GPS 기술은 1대의 컴퓨터에서 1조 개 간선 규모의 그래프를 계산할 수 있어 컴퓨터 자원 대비 10,000배 더 큰 규모의 데이터를 처리를 할 수 있음을 확인했다. 또한, 알고리즘 계산 시간도 최대 43배 더 빠름을 확인했다.
교신저자로 참여한 김민수 교수는 "오늘날 거의 모든 IT 분야에서 그래프 데이터를 활용하고 있는바, 연구팀이 개발한 새로운 기술은 그래프 알고리즘의 개발 규모와 효율을 획기적으로 높일 수 있어 산업적 측면에서 파급 효과가 매우 클 것으로 기대한다ˮ 라고 말했다.
이번 연구에는 김 교수의 제자이자 캐나다 워털루 대학에 박사후 연구원으로 재직 중인 박힘찬 박사가 제1 저자로, 김 교수가 교신저자로 참여했으며 지난 22일 그리스 차니아에서 온라인으로 열린 데이터베이스 분야 최고 국제학술대회 중 하나인 IEEE ICDE에서 발표됐다. (논문명 : Trillion-scale Graph Processing Simulation based on Top-Down Graph Upscaling).
한편, 이 연구는 한국연구재단 선도연구센터 사업 및 중견연구자 지원사업, 과기정통부 IITP SW스타랩 사업의 지원을 받아 수행됐다.
초대규모 그래프 프로세싱 시뮬레이션 기술 개발
우리 대학 연구진이 오늘날 정보통신(IT) 분야에서 광범위하게 사용되는 그래프 타입의 데이터를 실제로 저장하지 않고도 알고리즘을 계산할 수 있는 `그래프 프로세싱 시뮬레이션'이라는 신개념 기술을 세계 최초로 개발하는 데 성공했다. 데이터를 저장할 필요가 없어 1조 개 간선의 초대규모 그래프도 PC 한 대로 처리가 가능하다.
우리 대학 전산학부 김민수 교수 연구팀은 1조 개 간선의 초대규모 그래프에 대해 데이터 저장 없이 알고리즘을 계산할 수 있는 신개념 기술을 세계 최초로 개발했다고 23일 밝혔다.
오늘날 웹, SNS, 인공지능, 블록체인 등의 광범위한 분야들에서 그래프 타입의 데이터에 대한 다양한 알고리즘들의 연구가 매우 중요하다. 그러나 그래프 데이터의 복잡성으로 인해 그 크기가 커질 때 막대한 규모의 컴퓨터 클러스터가 있어야만 알고리즘 계산이 가능하다는 문제가 있다.
김 교수 연구팀은 이를 근본적으로 해결하는 T-GPS(Trillion-scale Graph Processing Simulation)라는 기술을 개발했다. 이 T-GPS 기술은 그래프 데이터를 실제로 디스크에 저장하지 않고도 마치 그래프 데이터가 저장돼 있는 것처럼 알고리즘을 계산할 수 있고, 계산 결과도 실제 저장된 그래프에 대한 알고리즘 계산과 완전히 동일하다는 장점이 있다.
그래프 알고리즘은 그래프 처리 엔진 상에서 개발되고 실행된다. 이는 산업적으로 널리 사용되는 SQL 질의를 데이터베이스 관리 시스템(DBMS) 엔진 상에서 개발하고 실행하는 것과 유사한 방식이다.
지금까지는 그래프 알고리즘을 개발하기 위해 먼저 합성 그래프를 생성 및 저장한 후, 이를 다시 그래프 처리 엔진에서 메모리로 적재해 알고리즘을 계산하는 2단계 방법을 사용했다. 그래프 데이터는 그 복잡성으로 인해 전체를 메모리로 적재하는 것이 요구되며, 그래프의 규모가 커지면 대규모 컴퓨터 클러스터 장비가 있어야만 알고리즘을 개발하고 실행할 수 있다는 커다란 단점이 있었다.
김 교수팀은 합성 그래프와 그래프 처리 엔진 분야에서 국제 최고 권위의 학술대회에 매년 논문을 발표하는 등 세계 최고의 기술력을 보유하고 있으며, 그 기술들을 바탕으로 기존 2단계 방법의 문제를 해결했다.
그래프 데이터상에서 그래프 알고리즘이 계산을 위해 접근하는 부분을 짧은 순간 동안 실시간으로 생성해, 마치 그래프 데이터가 존재하는 것처럼 알고리즘을 계산하는 것이다. 이때 그래프 데이터를 아무렇게 실시간 생성하는 것이 아니라 합성 그래프 모델에 따라 생성하고 저장한 것과 동일하도록 실시간 생성하는 것이 핵심 기술 중 하나다.
또한, 그래프 처리 엔진이 실시간으로 생성되는 그래프를 실제 그래프처럼 인식하고 알고리즘을 완전히 동일하게 계산하도록 엔진을 수정한 것이 또 다른 핵심 기술이다.
김민수 교수 연구팀은 T-GPS 기술을 종래의 2단계 방법과 성능을 비교한 결과, 종래의 2단계 방법이 11대의 컴퓨터로 구성된 클러스터에서 10억 개 간선 규모의 그래프를 계산할 수 있었던 반면, T-GPS 기술은 1대의 컴퓨터에서 1조 개 간선 규모의 그래프를 계산할 수 있어 컴퓨터 자원 대비 10,000배 더 큰 규모의 데이터를 처리를 할 수 있음을 확인했다. 또한, 알고리즘 계산 시간도 최대 43배 더 빠름을 확인했다.
교신저자로 참여한 김민수 교수는 "오늘날 거의 모든 IT 분야에서 그래프 데이터를 활용하고 있는바, 연구팀이 개발한 새로운 기술은 그래프 알고리즘의 개발 규모와 효율을 획기적으로 높일 수 있어 산업적 측면에서 파급 효과가 매우 클 것으로 기대한다ˮ 라고 말했다.
이번 연구에는 김 교수의 제자이자 캐나다 워털루 대학에 박사후 연구원으로 재직 중인 박힘찬 박사가 제1 저자로, 김 교수가 교신저자로 참여했으며 지난 22일 그리스 차니아에서 온라인으로 열린 데이터베이스 분야 최고 국제학술대회 중 하나인 IEEE ICDE에서 발표됐다. (논문명 : Trillion-scale Graph Processing Simulation based on Top-Down Graph Upscaling).
한편, 이 연구는 한국연구재단 선도연구센터 사업 및 중견연구자 지원사업, 과기정통부 IITP SW스타랩 사업의 지원을 받아 수행됐다.
2021.04.23
조회수 26926
-
 사생활 침해 논란없는 코로나19 감염병 확산방지시스템 개발
세계 각국에서 주목을 받는 K-방역을 떠받쳐 온 코로나19 관련 검사·추적·치료 등 기존 3T 시스템을 한층 업그레이드시킨 새로운 `코로나19 감염병 확산방지시스템(앱&웹)'이 개발됐다.
우리 대학이 개발한 이 시스템은 GPS·무선랜·블루투스·기압계·관성 센서의 신호를 주기적으로 수집, 기록하는 스마트폰 블랙박스를 기반으로 하고 있어 사생활 침해 논란을 최소화하면서 신속한 역학조사와 격리자 관리 등 코로나19 상황에 효율적인 대응이 가능하다. 기존 3T 시스템은 신용카드 이용 내역 등 광범위한 개인정보 접근을 통해 확진자 동선을 공개하는 과정에서 사생활 노출로 인한 인권침해 우려가 꾸준히 제기돼 왔다.
전산학부 지능형서비스통합연구실 한동수 교수 연구팀은 스마트폰의 이동 동선을 기록하는 스마트폰 블랙박스를 기반으로 `코로나19 감염병 확산방지시스템(앱&웹)'을 개발했다고 10일 밝혔다.
한 교수 연구팀이 개발한 스마트폰 블랙박스 시스템은 스마트폰에 내장돼있는 GPS와 와이파이·블루투스·관성 센서 등을 통해서 수집된 신호를 보관했다가 2주가 지나면 자동으로 폐기한다. 또 개인 스마트폰 블랙박스에 저장된 기록은 일체 외부로 유출되지 않으며 특히 확진자의 동선을 공개하는 경우에도 문자로 표현되는 장소 정보가 아닌 신호 정보를 공개하기 때문에 확진자의 사생활 보호가 가능하다.
따라서 코로나19 집단감염대응 차원에서 그동안 꾸준히 지적돼 온 개인의 사생활 침해 문제에 대해 기존과는 다르게 보다 섬세한 방법으로 접근했다는 점이 이 시스템의 가장 큰 특징이다.
한 교수팀의 `코로나19 감염병 확산방지시스템'은 크게 일반인을 위한 `바이러스 노출 자가진단 시스템'과 감염병 관리기관을 위한 `확진자 역학조사 시스템', 그리고 `격리자 관리 시스템' 등 3개 시스템으로 이뤄져 있다.
우선 `바이러스 노출 자가진단 시스템'은 확진자의 동선과 개인의 스마트폰 블랙박스에 기록된 동선의 중첩 여부를 체크해 이뤄진다. 현재 방식은 확진자의 정보가 메시지를 통해 전달되고 개개인이 직접 확진자의 동선을 확인하는 불편함이 따르지만 한 교수팀이 개발한 시스템에서는 사용자가 수시로 해당 앱의 버튼을 눌러 바이러스 노출 여부를 쉽고 빠르게 체크할 수 있다.
`확진자 역학조사 시스템'을 통해 확진자 관련 역학조사를 빠르고 정확하게 수행할 수 있다. 코로나19 감염병 확진을 받은 환자의 스마트폰 블랙박스에 기록된 신호를 지도상에 표시를 해주기 때문에 역학 조사관이 확진자의 이동 동선을 쉽게 파악할 수 있다.
한동수 교수는 이와 함께 이 시스템에 지난 10여년간 개발해 온 실내·외 통합 위치 인식시스템 KAILOS(KAIST Locating System)의 기능도 적용했다. 이에 따라 실내지도와 신호지도가 준비된 건물에서는 건물 내부에서도 확진자의 이동 동선을 확인할 수 있다.
스마트폰 블랙박스는 격리자 관리에도 활용된다. 격리자의 스마트폰 블랙박스가 수집한 신호는 주기적으로 `격리자 관리 시스템'에 전송된다. `격리자 관리 시스템'은 전송받은 신호를 실시간으로 분석해 격리자의 격리공간 이탈 여부를 확인한다. GPS 신호뿐 아니라 무선랜 신호를 사용함으로써 실외뿐 아니라 실내에서의 확진자 격리공간 이탈 여부를 확인할 수 있어 기존 방식보다 더 정확하게 격리자를 관리할 수 있다는 게 강점이다.
한동수 교수는 "현재 약 30여 종의 스마트폰이 사용되고 있는데 스마트폰마다 탑재된 센서의 종류가 매우 다양해서 연구팀이 개발한 시스템을 다양한 스마트폰에 이식하고 테스트하는 작업을 진행하고 있다ˮ면서 "이 작업을 마치는 대로 곧 시스템을 출시할 계획ˮ이라고 소개했다.
KAIST 신성철 총장도 "PreSPI(Prevention System for Pandemic Disease Infection)로 이름 붙인 이 시스템을 활용하면 코로나19 재확산으로 수고하는 의료진 등 방역 분야 종사자들의 수고와 시간을 획기적으로 줄일 수 있고 사생활 침해 논란 없이 신속하고 정확한 역학조사가 가능해져 K-방역의 우수성을 다시 한번 세계 각국에 과시하는 계기가 될 것ˮ이라고 강조했다.
사생활 침해 논란없는 코로나19 감염병 확산방지시스템 개발
세계 각국에서 주목을 받는 K-방역을 떠받쳐 온 코로나19 관련 검사·추적·치료 등 기존 3T 시스템을 한층 업그레이드시킨 새로운 `코로나19 감염병 확산방지시스템(앱&웹)'이 개발됐다.
우리 대학이 개발한 이 시스템은 GPS·무선랜·블루투스·기압계·관성 센서의 신호를 주기적으로 수집, 기록하는 스마트폰 블랙박스를 기반으로 하고 있어 사생활 침해 논란을 최소화하면서 신속한 역학조사와 격리자 관리 등 코로나19 상황에 효율적인 대응이 가능하다. 기존 3T 시스템은 신용카드 이용 내역 등 광범위한 개인정보 접근을 통해 확진자 동선을 공개하는 과정에서 사생활 노출로 인한 인권침해 우려가 꾸준히 제기돼 왔다.
전산학부 지능형서비스통합연구실 한동수 교수 연구팀은 스마트폰의 이동 동선을 기록하는 스마트폰 블랙박스를 기반으로 `코로나19 감염병 확산방지시스템(앱&웹)'을 개발했다고 10일 밝혔다.
한 교수 연구팀이 개발한 스마트폰 블랙박스 시스템은 스마트폰에 내장돼있는 GPS와 와이파이·블루투스·관성 센서 등을 통해서 수집된 신호를 보관했다가 2주가 지나면 자동으로 폐기한다. 또 개인 스마트폰 블랙박스에 저장된 기록은 일체 외부로 유출되지 않으며 특히 확진자의 동선을 공개하는 경우에도 문자로 표현되는 장소 정보가 아닌 신호 정보를 공개하기 때문에 확진자의 사생활 보호가 가능하다.
따라서 코로나19 집단감염대응 차원에서 그동안 꾸준히 지적돼 온 개인의 사생활 침해 문제에 대해 기존과는 다르게 보다 섬세한 방법으로 접근했다는 점이 이 시스템의 가장 큰 특징이다.
한 교수팀의 `코로나19 감염병 확산방지시스템'은 크게 일반인을 위한 `바이러스 노출 자가진단 시스템'과 감염병 관리기관을 위한 `확진자 역학조사 시스템', 그리고 `격리자 관리 시스템' 등 3개 시스템으로 이뤄져 있다.
우선 `바이러스 노출 자가진단 시스템'은 확진자의 동선과 개인의 스마트폰 블랙박스에 기록된 동선의 중첩 여부를 체크해 이뤄진다. 현재 방식은 확진자의 정보가 메시지를 통해 전달되고 개개인이 직접 확진자의 동선을 확인하는 불편함이 따르지만 한 교수팀이 개발한 시스템에서는 사용자가 수시로 해당 앱의 버튼을 눌러 바이러스 노출 여부를 쉽고 빠르게 체크할 수 있다.
`확진자 역학조사 시스템'을 통해 확진자 관련 역학조사를 빠르고 정확하게 수행할 수 있다. 코로나19 감염병 확진을 받은 환자의 스마트폰 블랙박스에 기록된 신호를 지도상에 표시를 해주기 때문에 역학 조사관이 확진자의 이동 동선을 쉽게 파악할 수 있다.
한동수 교수는 이와 함께 이 시스템에 지난 10여년간 개발해 온 실내·외 통합 위치 인식시스템 KAILOS(KAIST Locating System)의 기능도 적용했다. 이에 따라 실내지도와 신호지도가 준비된 건물에서는 건물 내부에서도 확진자의 이동 동선을 확인할 수 있다.
스마트폰 블랙박스는 격리자 관리에도 활용된다. 격리자의 스마트폰 블랙박스가 수집한 신호는 주기적으로 `격리자 관리 시스템'에 전송된다. `격리자 관리 시스템'은 전송받은 신호를 실시간으로 분석해 격리자의 격리공간 이탈 여부를 확인한다. GPS 신호뿐 아니라 무선랜 신호를 사용함으로써 실외뿐 아니라 실내에서의 확진자 격리공간 이탈 여부를 확인할 수 있어 기존 방식보다 더 정확하게 격리자를 관리할 수 있다는 게 강점이다.
한동수 교수는 "현재 약 30여 종의 스마트폰이 사용되고 있는데 스마트폰마다 탑재된 센서의 종류가 매우 다양해서 연구팀이 개발한 시스템을 다양한 스마트폰에 이식하고 테스트하는 작업을 진행하고 있다ˮ면서 "이 작업을 마치는 대로 곧 시스템을 출시할 계획ˮ이라고 소개했다.
KAIST 신성철 총장도 "PreSPI(Prevention System for Pandemic Disease Infection)로 이름 붙인 이 시스템을 활용하면 코로나19 재확산으로 수고하는 의료진 등 방역 분야 종사자들의 수고와 시간을 획기적으로 줄일 수 있고 사생활 침해 논란 없이 신속하고 정확한 역학조사가 가능해져 K-방역의 우수성을 다시 한번 세계 각국에 과시하는 계기가 될 것ˮ이라고 강조했다.
2020.06.11
조회수 25159
-
 김용대 교수, 대테러 방지용 안티 드론 기술 개발
〈 (오른쪽 위부터 시계방향으로) 김용대 교수, 권유진, 노주환, 신호철, 김도현 박사과정 〉
우리 대학 전기및전자공학부 김용대 교수 연구팀이 위조 GPS 신호를 이용해 드론의 위치를 속이는 방식으로 드론을 납치할 수 있는 안티 드론 기술을 개발했다.
이 기술은 긴급 상황에서 급격한 방향 변화 없이도 드론이 원하는 방향으로 안전하게 움직이도록 유도할 수 있어 테러 등의 목적을 가진 위험한 드론에 효과적으로 대응할 수 있다.
이번 연구성과는 ‘ACM 트랜잭션 온 프라이버시 & 시큐리티(ACM Transactions on Privacy and Security, TOPS)’ 저널 4월 9일 자에 게재됐다. (논문명 : Tractor Beam: Safe-hijacking of Consumer Drones with Adaptive GPS Spoofing)
드론 산업이 발전하며 수색, 구조, 방재 및 재해 대응, 택배와 정찰 등 다양한 영역에서 드론이 활용되면서 한편으로는 사유지와 주요시설 무단 침입, 안전과 보안 위협, 사생활 침해 등의 우려 또한 커지고 있다.
이에 따라 드론 침투를 탐지하고 대응하는 안티 드론 산업 급성장하고 있다. 현재 공항 등 주요시설에 구축되고 있는 안티 드론 시스템들은 방해 전파나 고출력 레이저를 쏘거나 그물로 포획해 드론을 무력화시키는 방식이다.
그러나 테러를 목적으로 폭발물이나 무기를 장착한 드론은 사람들과 주요시설로부터 즉시 안전거리를 확보한 뒤 무력화해야 피해가 최소화될 수 있다. 예를 들어 공항에서 무단 침입한 드론을 단순 방해 전파로 대응하면 드론을 못 움직이게 할 수는 있지만 한 자리에 계속 떠 있게 돼 비행기의 이착륙이 긴 시간 중단될 수 있다.
이렇듯 위험한 드론을 발견하는 즉시 안전하게 원하는 방향으로 격리할 수 있는 새로운 안티 드론 기술의 필요성이 커지고 있다.
김 교수 연구팀은 위조 GPS 신호를 이용해 드론의 위치를 속이는 방식으로 드론을 납치할 수 있는 안티 드론 기술을 개발했다.
위조 GPS 신호를 통해 드론이 자신의 위치를 착각하게 만들어서 정해진 위치나 경로로부터 드론을 이탈시키는 공격 기법은 기존 연구를 통해 알려진 바 있다. 그러나 이러한 공격 기법은 GPS 안전모드가 활성화되면 적용할 수 없다는 문제가 있다.
GPS 안전모드는 드론이 위조 GPS 신호로 인해 신호가 끊기거나 위치 정확도가 낮아지면 드론의 안전을 보장하기 위해 발동되는 일종의 비상 모드로 모델이나 제조사에 따라 제각각이기 때문이다.
연구팀은 디제이아이(DJI), 패롯(Parrot) 등 주요 드론 제조업체의 드론 GPS 안전모드를 분석하고 이를 기준으로 드론의 분류 체계를 만들어 각 드론 유형에 따른 드론 납치 기법을 설계했다.
이 분류 체계는 거의 모든 형태의 드론 GPS 안전모드를 다루고 있어 모델, 제조사와 관계없이 GPS를 사용하고 있는 드론이라면 보편적으로 적용할 수 있다. 연구팀은 실제 총 4종의 드론에 개발한 기법을 적용했고, 그 결과 작은 오차범위 안에서 의도한 납치 방향으로 드론을 안전하게 유도할 수 있음을 입증했다.
김 교수는 “기존 컨슈머 드론들은 GPS 안전모드를 갖추고 있어 위조 GPS 공격으로부터 안전한 것처럼 보이나 초보적인 방법으로 GPS 오류를 감지하고 있어 대부분 우회가 가능하다”라며 “특히 드론 불법 비행으로 발생하는 항공업계와 공항의 피해를 줄이는데 기여할 수 있을 것이다”라고 말했다.
연구팀은 기술이전을 통해 기존 안티 드론 솔루션에 연구팀이 개발한 기술을 적용하는 방식으로 상용화에 나설 계획이다.
이번 연구는 방위사업청의 광운대학교 초소형무인기 전술신호처리 특화연구실과 국방과학연구소의 지원을 통해 수행됐다.
□ 그림 설명
그림1. PC로 부터 위조 GPS 전파를 생성하여 지향성 안테나를 이용해 드론에 신호를 주입하는 실험환경
김용대 교수, 대테러 방지용 안티 드론 기술 개발
〈 (오른쪽 위부터 시계방향으로) 김용대 교수, 권유진, 노주환, 신호철, 김도현 박사과정 〉
우리 대학 전기및전자공학부 김용대 교수 연구팀이 위조 GPS 신호를 이용해 드론의 위치를 속이는 방식으로 드론을 납치할 수 있는 안티 드론 기술을 개발했다.
이 기술은 긴급 상황에서 급격한 방향 변화 없이도 드론이 원하는 방향으로 안전하게 움직이도록 유도할 수 있어 테러 등의 목적을 가진 위험한 드론에 효과적으로 대응할 수 있다.
이번 연구성과는 ‘ACM 트랜잭션 온 프라이버시 & 시큐리티(ACM Transactions on Privacy and Security, TOPS)’ 저널 4월 9일 자에 게재됐다. (논문명 : Tractor Beam: Safe-hijacking of Consumer Drones with Adaptive GPS Spoofing)
드론 산업이 발전하며 수색, 구조, 방재 및 재해 대응, 택배와 정찰 등 다양한 영역에서 드론이 활용되면서 한편으로는 사유지와 주요시설 무단 침입, 안전과 보안 위협, 사생활 침해 등의 우려 또한 커지고 있다.
이에 따라 드론 침투를 탐지하고 대응하는 안티 드론 산업 급성장하고 있다. 현재 공항 등 주요시설에 구축되고 있는 안티 드론 시스템들은 방해 전파나 고출력 레이저를 쏘거나 그물로 포획해 드론을 무력화시키는 방식이다.
그러나 테러를 목적으로 폭발물이나 무기를 장착한 드론은 사람들과 주요시설로부터 즉시 안전거리를 확보한 뒤 무력화해야 피해가 최소화될 수 있다. 예를 들어 공항에서 무단 침입한 드론을 단순 방해 전파로 대응하면 드론을 못 움직이게 할 수는 있지만 한 자리에 계속 떠 있게 돼 비행기의 이착륙이 긴 시간 중단될 수 있다.
이렇듯 위험한 드론을 발견하는 즉시 안전하게 원하는 방향으로 격리할 수 있는 새로운 안티 드론 기술의 필요성이 커지고 있다.
김 교수 연구팀은 위조 GPS 신호를 이용해 드론의 위치를 속이는 방식으로 드론을 납치할 수 있는 안티 드론 기술을 개발했다.
위조 GPS 신호를 통해 드론이 자신의 위치를 착각하게 만들어서 정해진 위치나 경로로부터 드론을 이탈시키는 공격 기법은 기존 연구를 통해 알려진 바 있다. 그러나 이러한 공격 기법은 GPS 안전모드가 활성화되면 적용할 수 없다는 문제가 있다.
GPS 안전모드는 드론이 위조 GPS 신호로 인해 신호가 끊기거나 위치 정확도가 낮아지면 드론의 안전을 보장하기 위해 발동되는 일종의 비상 모드로 모델이나 제조사에 따라 제각각이기 때문이다.
연구팀은 디제이아이(DJI), 패롯(Parrot) 등 주요 드론 제조업체의 드론 GPS 안전모드를 분석하고 이를 기준으로 드론의 분류 체계를 만들어 각 드론 유형에 따른 드론 납치 기법을 설계했다.
이 분류 체계는 거의 모든 형태의 드론 GPS 안전모드를 다루고 있어 모델, 제조사와 관계없이 GPS를 사용하고 있는 드론이라면 보편적으로 적용할 수 있다. 연구팀은 실제 총 4종의 드론에 개발한 기법을 적용했고, 그 결과 작은 오차범위 안에서 의도한 납치 방향으로 드론을 안전하게 유도할 수 있음을 입증했다.
김 교수는 “기존 컨슈머 드론들은 GPS 안전모드를 갖추고 있어 위조 GPS 공격으로부터 안전한 것처럼 보이나 초보적인 방법으로 GPS 오류를 감지하고 있어 대부분 우회가 가능하다”라며 “특히 드론 불법 비행으로 발생하는 항공업계와 공항의 피해를 줄이는데 기여할 수 있을 것이다”라고 말했다.
연구팀은 기술이전을 통해 기존 안티 드론 솔루션에 연구팀이 개발한 기술을 적용하는 방식으로 상용화에 나설 계획이다.
이번 연구는 방위사업청의 광운대학교 초소형무인기 전술신호처리 특화연구실과 국방과학연구소의 지원을 통해 수행됐다.
□ 그림 설명
그림1. PC로 부터 위조 GPS 전파를 생성하여 지향성 안테나를 이용해 드론에 신호를 주입하는 실험환경
2019.06.05
조회수 18996
-
 한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
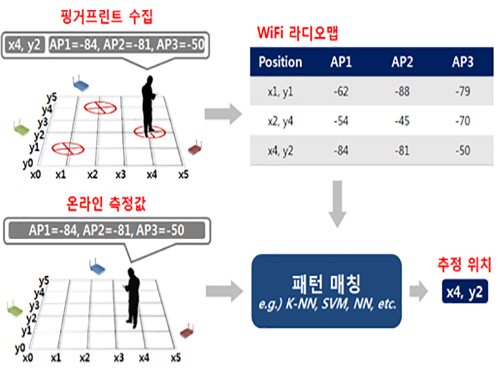
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
2017.04.12
조회수 18860
-
 KAIST, 대학 캠퍼스 내 실내외 통합 내비게이션 개발
한 동 수 교수
석사과정 면접을 앞둔 김 모 군은 면접 당일 교내에서 곤욕을 치렀다. 캠퍼스가 넓어 길 찾기가 어려웠을 뿐 아니라 실내에 도착한 이후에도 정확한 면접장 위치를 찾지 못해 지각을 겨우 면했기 때문이다.
우리 대학 전산학부 한동수 교수 연구팀은 위와 같은 문제를 해결할 수 있는 실내외 통합 내비게이션 시스템 ‘캠퍼스 아틀라스(가제)’를 개발했다.
이번에 개발된 실내외 통합 내비게이션 시스템은 우리 대학 캠퍼스에 적용돼 방문자의 이름 혹은 목적지의 방 번호를 입력하면 도착할 때까지 실내외가 연결된 길 안내 서비스를 제공한다.
또한 교내에서 열리는 학회나 강연 등을 행사 장소와 함께 등록해 행사명만으로도 목적지를 검색하는 기능을 삽입했다. 이를 통해 방문객들이 어려움 없이 행사 장소를 찾을 수 있게 만들었다.
한 교수의 지능형 서비스 연구실은 평균 4~5층으로 구성된 40여 개 건물이 있는 우리 대학 캠퍼스를 대상으로 기술을 구현했다.
200여 개의 실내 지도, 4천 여 개의 관심지점(POI: Point Of Interest) 정보, 7천 여 개의 노드로 구성된 실내외 경로, 약 40여 개의 건물별 무선랜 신호지도 구축 작업을 수행했다.
이렇게 수집된 정보는 작년 3월 연구팀이 개발한 글로벌 실내 위치인식 시스템인 KAILOS(KAIST Indoor Locating System)에 적용해 일반에 공개하고 있다.
KAILOS는 사용자 참여 방식(크라우드 소싱)으로 전 세계 실내지도와 신호지도를 모아 실내 내비게이션 서비스를 제공하는 실내 GPS 시스템이다. 실내지도 등록, 무선신호 수집 툴, 실내 경로 설계 툴 등을 갖추고 있다.
그 외에도 위치인식 정확도 가시화 툴, 실내외 통합 위치인식 시스템 등을 추가할 예정이다.
연구팀은 대학 뿐 아니라 지하철 및 버스 환승 구역, 실내 외 쇼핑몰이 공존하는 지역 등 통합 내비게이션 서비스가 요구되는 지역을 대상으로 적용 영역을 넓힐 예정이다. 궁극적으로는 상용 실외 내비게이션 시스템과 연계시키는 것을 목표로 한다고 밝혔다.
한 교수는 “길 안내 서비스에 머무르지 않고 캠퍼스 라이프 로깅, 출결 체크 자동화 등으로 발전시킬 것이다”며 “새로운 교육 및 연구 환경을 제공하는 위치 기반 스마트 캠퍼스로 발전시킬 계획이다”고 말했다.
□ 그림 설명
그림 1. Campus Atlas 앱 주요 화면
그림 2. KAIST 캠퍼스 외부 경로 설계가 완성된 모습
KAIST, 대학 캠퍼스 내 실내외 통합 내비게이션 개발
한 동 수 교수
석사과정 면접을 앞둔 김 모 군은 면접 당일 교내에서 곤욕을 치렀다. 캠퍼스가 넓어 길 찾기가 어려웠을 뿐 아니라 실내에 도착한 이후에도 정확한 면접장 위치를 찾지 못해 지각을 겨우 면했기 때문이다.
우리 대학 전산학부 한동수 교수 연구팀은 위와 같은 문제를 해결할 수 있는 실내외 통합 내비게이션 시스템 ‘캠퍼스 아틀라스(가제)’를 개발했다.
이번에 개발된 실내외 통합 내비게이션 시스템은 우리 대학 캠퍼스에 적용돼 방문자의 이름 혹은 목적지의 방 번호를 입력하면 도착할 때까지 실내외가 연결된 길 안내 서비스를 제공한다.
또한 교내에서 열리는 학회나 강연 등을 행사 장소와 함께 등록해 행사명만으로도 목적지를 검색하는 기능을 삽입했다. 이를 통해 방문객들이 어려움 없이 행사 장소를 찾을 수 있게 만들었다.
한 교수의 지능형 서비스 연구실은 평균 4~5층으로 구성된 40여 개 건물이 있는 우리 대학 캠퍼스를 대상으로 기술을 구현했다.
200여 개의 실내 지도, 4천 여 개의 관심지점(POI: Point Of Interest) 정보, 7천 여 개의 노드로 구성된 실내외 경로, 약 40여 개의 건물별 무선랜 신호지도 구축 작업을 수행했다.
이렇게 수집된 정보는 작년 3월 연구팀이 개발한 글로벌 실내 위치인식 시스템인 KAILOS(KAIST Indoor Locating System)에 적용해 일반에 공개하고 있다.
KAILOS는 사용자 참여 방식(크라우드 소싱)으로 전 세계 실내지도와 신호지도를 모아 실내 내비게이션 서비스를 제공하는 실내 GPS 시스템이다. 실내지도 등록, 무선신호 수집 툴, 실내 경로 설계 툴 등을 갖추고 있다.
그 외에도 위치인식 정확도 가시화 툴, 실내외 통합 위치인식 시스템 등을 추가할 예정이다.
연구팀은 대학 뿐 아니라 지하철 및 버스 환승 구역, 실내 외 쇼핑몰이 공존하는 지역 등 통합 내비게이션 서비스가 요구되는 지역을 대상으로 적용 영역을 넓힐 예정이다. 궁극적으로는 상용 실외 내비게이션 시스템과 연계시키는 것을 목표로 한다고 밝혔다.
한 교수는 “길 안내 서비스에 머무르지 않고 캠퍼스 라이프 로깅, 출결 체크 자동화 등으로 발전시킬 것이다”며 “새로운 교육 및 연구 환경을 제공하는 위치 기반 스마트 캠퍼스로 발전시킬 계획이다”고 말했다.
□ 그림 설명
그림 1. Campus Atlas 앱 주요 화면
그림 2. KAIST 캠퍼스 외부 경로 설계가 완성된 모습
2015.09.02
조회수 12315
-
 한동수 교수, 2013 대한민국 창조경제대상 국무총리상 수상
우리 학교 전산학과 한동수 교수가 12일 오전 11시 20분 서울 코엑스 인터컨티넨탈 호텔에서 열린 ‘2013 대한민국 창조경제대상’에서 개인으로는 1위에 해당하는 국무총리상을 수상했다.
한 교수는 △실내 GPS 시스템을 구축하는 기술 △실내외 통합 내비게이션 시스템 △특허서적 발간 등을 통해 정부가 추진하는 창조경제에 기여한 공로를 인정받았다.
이와 함께 실내위치인식분야와 스마트폰 응용 서비스 분야에서 50여 건의 특허를 출원하고 30여 건을 등록, 국내외 실내위치인식분야 기술 발전에 폭 넓게 기여한 점도 인정받았다.
한 교수가 개발한 실내 GPS 구축 지원 시스템과 실내외 통합 내비게이션 시스템은 12일부터 4일 동안 코엑스에서 개최되는 창조경제 박람회에서 전시된다.
‘대한민국 창조경제대상’은 창의적인 신기술을 개발해 창조경제 활성화에 기여한 기업이나 개인을 발굴해 포상하는 상이다.
한동수 교수, 2013 대한민국 창조경제대상 국무총리상 수상
우리 학교 전산학과 한동수 교수가 12일 오전 11시 20분 서울 코엑스 인터컨티넨탈 호텔에서 열린 ‘2013 대한민국 창조경제대상’에서 개인으로는 1위에 해당하는 국무총리상을 수상했다.
한 교수는 △실내 GPS 시스템을 구축하는 기술 △실내외 통합 내비게이션 시스템 △특허서적 발간 등을 통해 정부가 추진하는 창조경제에 기여한 공로를 인정받았다.
이와 함께 실내위치인식분야와 스마트폰 응용 서비스 분야에서 50여 건의 특허를 출원하고 30여 건을 등록, 국내외 실내위치인식분야 기술 발전에 폭 넓게 기여한 점도 인정받았다.
한 교수가 개발한 실내 GPS 구축 지원 시스템과 실내외 통합 내비게이션 시스템은 12일부터 4일 동안 코엑스에서 개최되는 창조경제 박람회에서 전시된다.
‘대한민국 창조경제대상’은 창의적인 신기술을 개발해 창조경제 활성화에 기여한 기업이나 개인을 발굴해 포상하는 상이다.
2013.12.12
조회수 14284
-
 한동수 칼럼 GPS 산업의 차세대 금맥
우리학교 전산학과 한동수 교수가
매일경제 2013년 11월 6일(수)자 칼럼을 실었다.
제목: GPS 산업의 차세대 금맥
신문: 매일경제
저자: 전산학과 한동수 교수
일시: 2013년 11월 6일(수)
기사보기 : GPS 산업의 차세대 금맥
한동수 칼럼 GPS 산업의 차세대 금맥
우리학교 전산학과 한동수 교수가
매일경제 2013년 11월 6일(수)자 칼럼을 실었다.
제목: GPS 산업의 차세대 금맥
신문: 매일경제
저자: 전산학과 한동수 교수
일시: 2013년 11월 6일(수)
기사보기 : GPS 산업의 차세대 금맥
2013.11.06
조회수 9255
-
 이지윤 교수, 미국 FAA 공로상 수상
- 태양폭풍으로 인한 이온층 변화를 감시해 항공기 안전운항 보장 -
우리 학교 항공우주공학과 이지윤(39) 교수가 GPS(위성항법시스템) 보강시스템 개발 및 위성항법 기술진보에 크게 공헌한 점을 인정받아 지난 16일 미국 연방항공청(Federal Aviation Administration, FAA)으로부터 공로상을 수상했다.
GPS 보강시스템은 실시간 1m 이내의 위치 정확도와 무결성 정보를 제공해 항공기의 정밀하고 안전한 항행을 가능하게 한다. 하지만 태양 활동이 극대기에 이르면 이온층의 총전자량이 급격히 늘어나면서 GPS 보강시스템을 이용한 항법해의 위치오차가 증가한다.
이 교수는 태양폭풍으로 인한 이온층의 변화를 지속적으로 감시하고 이온층 위협 모델을 구축해 GPS 보강시스템 사용자의 안전을 보장할 수 있도록 하는 독창적인 모니터링 소프트웨어를 개발했다. 연구 결과는 지구물리학분야의 세계적 학술지 ‘라디오 사이언스(Radio Science)’에 지난해 7월 게재됐다.
이 교수가 개발한 소프트웨어는 FAA 기술센터의 검증을 거쳐 유로컨트롤(Eurocontrol)을 비롯한 세계 주요기관에 배포돼 사용 중으로 향후 국제기구의 협의를 거쳐 표준화될 전망이다.
이 교수는 “미래 항법기술의 핵심인 위성항법에 대한 활용도가 항공·해양·교통· 정보통신·금융 등 주요 국가 인프라로 확대된 만큼 시스템의 성능과 안전성 확보가 무엇보다 중요한 시기”라며 “앞으로 국가 간 협력을 통해 GPS 보강시스템의 전지구적 서비스가 가능한 방향으로 발전할 것”이라고 밝혔다.
이지윤 교수, 미국 FAA 공로상 수상
- 태양폭풍으로 인한 이온층 변화를 감시해 항공기 안전운항 보장 -
우리 학교 항공우주공학과 이지윤(39) 교수가 GPS(위성항법시스템) 보강시스템 개발 및 위성항법 기술진보에 크게 공헌한 점을 인정받아 지난 16일 미국 연방항공청(Federal Aviation Administration, FAA)으로부터 공로상을 수상했다.
GPS 보강시스템은 실시간 1m 이내의 위치 정확도와 무결성 정보를 제공해 항공기의 정밀하고 안전한 항행을 가능하게 한다. 하지만 태양 활동이 극대기에 이르면 이온층의 총전자량이 급격히 늘어나면서 GPS 보강시스템을 이용한 항법해의 위치오차가 증가한다.
이 교수는 태양폭풍으로 인한 이온층의 변화를 지속적으로 감시하고 이온층 위협 모델을 구축해 GPS 보강시스템 사용자의 안전을 보장할 수 있도록 하는 독창적인 모니터링 소프트웨어를 개발했다. 연구 결과는 지구물리학분야의 세계적 학술지 ‘라디오 사이언스(Radio Science)’에 지난해 7월 게재됐다.
이 교수가 개발한 소프트웨어는 FAA 기술센터의 검증을 거쳐 유로컨트롤(Eurocontrol)을 비롯한 세계 주요기관에 배포돼 사용 중으로 향후 국제기구의 협의를 거쳐 표준화될 전망이다.
이 교수는 “미래 항법기술의 핵심인 위성항법에 대한 활용도가 항공·해양·교통· 정보통신·금융 등 주요 국가 인프라로 확대된 만큼 시스템의 성능과 안전성 확보가 무엇보다 중요한 시기”라며 “앞으로 국가 간 협력을 통해 GPS 보강시스템의 전지구적 서비스가 가능한 방향으로 발전할 것”이라고 밝혔다.
2013.09.26
조회수 16626
-
 명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
2013.08.19
조회수 18204