%ED%95%99%EC%88%A0%EB%8C%80%ED%9A%8C
-
 김정호 교수, 한국반도체학술대회 ‘2025 강대원 상’ 수상
우리 대학 전기및전자공학부 김정호 교수가 회로·시스템 분야 '2025년 강대원 상'을 한국반도체학술대회 상임운영위원회로부터 수상한다. 김 교수는 HBM 개발에 기여한 공로를 인정받아 SK하이닉스 이강욱 부사장과 함께 수상한다. 시상식은 13일 오후 강원도 하이원그랜드호텔에서 한국반도체산업협회 · 한국반도체연구조합 · DB하이텍이 공동으로 주관, 개최하는 ‘제32회 한국반도체학술대회(KCS 2025)’ 개막식에서 진행된다.
강대원 상은 세계 최초로 모스펫(MOSFET)과 플로팅게이트를 개발해, 반도체 기술 발전에 신기원을 이룩한 고(故) 강대원 박사를 기리기 위해 제정되었으며, 한국반도체학술대회 상임운영위원회가 지난 2017년 열린 제24회 반도체 학술대회부터 강대원 박사를 이을 인재들을 발굴, 선정해서 시상하고 있다.
김정호 교수는 ‘HBM 아버지’로 불리는 인공지능 반도체 분야의 세계적 권위자이다. 지난 20년 이상 HBM 관련 설계 기술을 세계적으로 주도해 왔다. 특히 HBM 실리콘관통전극(TSV), 인터포저, 신호선 설계(SI), 전력선 설계(PI) 등을 연구하며 세계적으로 연구의 독창성을 인정받고 있다. 이것뿐만 아니라 2010년부터 HBM 상용화 설계에 직접 참여하고 있다. 그 결과, 현재의 인공지능 시대를 가능하게 했다는 평가를 받는다.
최근에는 6세대 HBM인 HBM4를 비롯해, HBM5, HBM6와 같은 차세대 HBM 구조와 아키텍트를 주도적으로 연구 중이다. 여기에 한 걸음 더 나아가 HBM 설계를 인공지능으로 자동화하려는 시도를 병행하고 있다. 특히 강화학습과 생성 인공지능을 결합해 HBM의 전기적, 열적 최적화 연구를 세계적 수준으로 이끌며, 이 분야의 연구를 선도하고 있다.
작년 6월에는, 삼성전자와 공동으로 KAIST에 ‘시스템아키텍트대학원’을 설립해 인공지능 반도체 분야 H/W 및 S/W 동시 설계가 가능한 고급 전문 인력을 양성하는 데 힘쓰고 있으며, 2018년부터 삼성전자 산학협력센터장을 맡고 있다. 또 네이버 ‧ 인텔과 협력해 KAIST에 AI 공동연구센터(NIK AI Research Center)를 설립하는 등 AI 반도체 설계와 더불어 AI 클라우드, AI 데이터 센터 성능 최적화를 목표로 반도체 산업의 신생태계 구축에도 기여하고 있다.
IEEE(국제전기전자공학자학회) 석학회원(Fellow)인 김 교수는 이와 같이 반도체 분야 연구와 교육을 통해 산업 발전에 기여한 공로를 인정받아 KAIST 학술상, KAIST 연구대상, KAIST 국제협력상, IEEE 기술 업적상 등을 수상했으며. IEEE 등 여러 국제학회에서 20여 차례에 걸쳐 '최고 논문상‘을 받는 등 학술적인 면에서도 큰 성과를 거두고 있다.
‘강대원 상’은 한국반도체학술대회 상임운영위원회가 세계적인 반도체 연구자인 고(故) 강대원 박사의 업적을 재조명하기 위해 지난 2017년, 처음 제정한 상이다. 강 박사는 미국 벨연구소에 입사해 1960년 이집트 출신 아탈라 박사와 트랜지스터 모스펫(MOS-FET)을 개발, 현대 반도체 기술의 핵심 토대를 마련했다. 또 플래시메모리 근간인 플로팅게이트를 세계 최초로 개발하기도 했다.
한편 한국반도체산업협회와 한국반도체연구조합, DB하이텍이 12~14일 강원도 하이원그랜드호텔에서 개최하는 32회 한국반도체학술대회에는 삼성전자·SK하이닉스·DB하이텍 등 반도체 기업을 포함해 국내 4,200명 이상의 반도체 분야 산·학·연 전문가와 학생이 참석해 역대 최대 규모인 1,659편 논문을 발표하는 등 연구 성과를 공유한다.
2025.02.12 조회수 2576
김정호 교수, 한국반도체학술대회 ‘2025 강대원 상’ 수상
우리 대학 전기및전자공학부 김정호 교수가 회로·시스템 분야 '2025년 강대원 상'을 한국반도체학술대회 상임운영위원회로부터 수상한다. 김 교수는 HBM 개발에 기여한 공로를 인정받아 SK하이닉스 이강욱 부사장과 함께 수상한다. 시상식은 13일 오후 강원도 하이원그랜드호텔에서 한국반도체산업협회 · 한국반도체연구조합 · DB하이텍이 공동으로 주관, 개최하는 ‘제32회 한국반도체학술대회(KCS 2025)’ 개막식에서 진행된다.
강대원 상은 세계 최초로 모스펫(MOSFET)과 플로팅게이트를 개발해, 반도체 기술 발전에 신기원을 이룩한 고(故) 강대원 박사를 기리기 위해 제정되었으며, 한국반도체학술대회 상임운영위원회가 지난 2017년 열린 제24회 반도체 학술대회부터 강대원 박사를 이을 인재들을 발굴, 선정해서 시상하고 있다.
김정호 교수는 ‘HBM 아버지’로 불리는 인공지능 반도체 분야의 세계적 권위자이다. 지난 20년 이상 HBM 관련 설계 기술을 세계적으로 주도해 왔다. 특히 HBM 실리콘관통전극(TSV), 인터포저, 신호선 설계(SI), 전력선 설계(PI) 등을 연구하며 세계적으로 연구의 독창성을 인정받고 있다. 이것뿐만 아니라 2010년부터 HBM 상용화 설계에 직접 참여하고 있다. 그 결과, 현재의 인공지능 시대를 가능하게 했다는 평가를 받는다.
최근에는 6세대 HBM인 HBM4를 비롯해, HBM5, HBM6와 같은 차세대 HBM 구조와 아키텍트를 주도적으로 연구 중이다. 여기에 한 걸음 더 나아가 HBM 설계를 인공지능으로 자동화하려는 시도를 병행하고 있다. 특히 강화학습과 생성 인공지능을 결합해 HBM의 전기적, 열적 최적화 연구를 세계적 수준으로 이끌며, 이 분야의 연구를 선도하고 있다.
작년 6월에는, 삼성전자와 공동으로 KAIST에 ‘시스템아키텍트대학원’을 설립해 인공지능 반도체 분야 H/W 및 S/W 동시 설계가 가능한 고급 전문 인력을 양성하는 데 힘쓰고 있으며, 2018년부터 삼성전자 산학협력센터장을 맡고 있다. 또 네이버 ‧ 인텔과 협력해 KAIST에 AI 공동연구센터(NIK AI Research Center)를 설립하는 등 AI 반도체 설계와 더불어 AI 클라우드, AI 데이터 센터 성능 최적화를 목표로 반도체 산업의 신생태계 구축에도 기여하고 있다.
IEEE(국제전기전자공학자학회) 석학회원(Fellow)인 김 교수는 이와 같이 반도체 분야 연구와 교육을 통해 산업 발전에 기여한 공로를 인정받아 KAIST 학술상, KAIST 연구대상, KAIST 국제협력상, IEEE 기술 업적상 등을 수상했으며. IEEE 등 여러 국제학회에서 20여 차례에 걸쳐 '최고 논문상‘을 받는 등 학술적인 면에서도 큰 성과를 거두고 있다.
‘강대원 상’은 한국반도체학술대회 상임운영위원회가 세계적인 반도체 연구자인 고(故) 강대원 박사의 업적을 재조명하기 위해 지난 2017년, 처음 제정한 상이다. 강 박사는 미국 벨연구소에 입사해 1960년 이집트 출신 아탈라 박사와 트랜지스터 모스펫(MOS-FET)을 개발, 현대 반도체 기술의 핵심 토대를 마련했다. 또 플래시메모리 근간인 플로팅게이트를 세계 최초로 개발하기도 했다.
한편 한국반도체산업협회와 한국반도체연구조합, DB하이텍이 12~14일 강원도 하이원그랜드호텔에서 개최하는 32회 한국반도체학술대회에는 삼성전자·SK하이닉스·DB하이텍 등 반도체 기업을 포함해 국내 4,200명 이상의 반도체 분야 산·학·연 전문가와 학생이 참석해 역대 최대 규모인 1,659편 논문을 발표하는 등 연구 성과를 공유한다.
2025.02.12 조회수 2576 -
 KAIST 단독 보안 학술대회 개최
우리 대학이 국내 대학으로서는 최초로 단독 보안 학술대회 ‘Security@KAIST Fair’를 오는 26일 개최한다.
정보보호대학원(책임교수 차상길)은 미 컴퓨터과학분야 평가사이트인 csrankings.org 기준 세계 20위권의 보안 연구 실적을 확보한 명실공히 국내 최고의 보안 연구 기관으로 평가받고 있으며, 본 학술대회를 통해 KAIST가 연구개발 중인 세계적인 수준의 최첨단 보안기술을 대외적으로 소개하는 자리를 마련했다.
이번 행사는 KAIST 정보보호대학원과 사이버보안연구센터가 주관하며, KAIST 내부에서 진행 중인 50개 이상의 프로젝트 발표와 5건의 기술 세미나, 그리고 다양한 보안 데모가 진행된다. 특히 아직 발표되지 않은 프로젝트가 다수 발표되어 보안 기술의 최신 동향을 한눈에 확인할 수 있는 자리가 될 전망이다. 또한 KAIST 정보보호대학원을 졸업하고 국내외에서 활동중인 졸업생과의 대화 자리를 마련하여 보안 분야에서의 취업과 연구 경험을 공유한다. 그리고 보안 분야를 선도하는 대표 기업들과의 협력을 진행하며, 현대자동차, SK텔레콤, ㈜스패로우 등 기업의 최신 보안 기술 전시가 함께 펼쳐진다.
전산학부는 올해 8월 ‘정보보호특성화 대학 사업’에 선정되었을 뿐 아니라 지난 6년간 진행해온 융합보안대학원 사업과 함께 정보보호 분야의의 특성화 인재양성에 적극 힘쓰고 있다.
한편, 과학기술정보통신부의 재원으로 정보통신기획평가원(IITP), 한국인터넷진흥원(KISA)의 지원을 받아 수행되는 본 행사는 대전 KAIST 본원에서 개최되는 행사로 누구나 무료로 참여할 수 있으며, 자세한 사항은 행사 홈페이지에서 확인할 수 있다(https://seckaist.github.io/2024/).
2024.11.12 조회수 3664
KAIST 단독 보안 학술대회 개최
우리 대학이 국내 대학으로서는 최초로 단독 보안 학술대회 ‘Security@KAIST Fair’를 오는 26일 개최한다.
정보보호대학원(책임교수 차상길)은 미 컴퓨터과학분야 평가사이트인 csrankings.org 기준 세계 20위권의 보안 연구 실적을 확보한 명실공히 국내 최고의 보안 연구 기관으로 평가받고 있으며, 본 학술대회를 통해 KAIST가 연구개발 중인 세계적인 수준의 최첨단 보안기술을 대외적으로 소개하는 자리를 마련했다.
이번 행사는 KAIST 정보보호대학원과 사이버보안연구센터가 주관하며, KAIST 내부에서 진행 중인 50개 이상의 프로젝트 발표와 5건의 기술 세미나, 그리고 다양한 보안 데모가 진행된다. 특히 아직 발표되지 않은 프로젝트가 다수 발표되어 보안 기술의 최신 동향을 한눈에 확인할 수 있는 자리가 될 전망이다. 또한 KAIST 정보보호대학원을 졸업하고 국내외에서 활동중인 졸업생과의 대화 자리를 마련하여 보안 분야에서의 취업과 연구 경험을 공유한다. 그리고 보안 분야를 선도하는 대표 기업들과의 협력을 진행하며, 현대자동차, SK텔레콤, ㈜스패로우 등 기업의 최신 보안 기술 전시가 함께 펼쳐진다.
전산학부는 올해 8월 ‘정보보호특성화 대학 사업’에 선정되었을 뿐 아니라 지난 6년간 진행해온 융합보안대학원 사업과 함께 정보보호 분야의의 특성화 인재양성에 적극 힘쓰고 있다.
한편, 과학기술정보통신부의 재원으로 정보통신기획평가원(IITP), 한국인터넷진흥원(KISA)의 지원을 받아 수행되는 본 행사는 대전 KAIST 본원에서 개최되는 행사로 누구나 무료로 참여할 수 있으며, 자세한 사항은 행사 홈페이지에서 확인할 수 있다(https://seckaist.github.io/2024/).
2024.11.12 조회수 3664 -
 경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
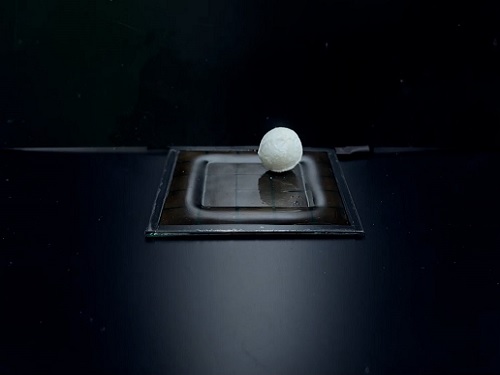
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5198
경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5198 -
 제21회 Ubiquitous Robots 2024 국제학술대회 개최
우리 대학이 한국로봇학회, 뉴욕대학교(이하 NYU)와 공동으로 '제21회 Ubiquitous Robots 2024 국제학술대회'를 지난달 24일부터 4일간 개최했다. 'KAIST-NYU 로보틱스 연구센터'의 주관으로 NYU 킴멜센터에서 열린 이번 학술대회는 유지환 건설및환경공학과 교수와 주세피 로이아노(Giuseppe Loianno) NYU 전기및컴퓨터공학과 교수가 공동조직위원장을 맡고 경기욱 기계공학과 교수와 파록 아타시자(Farokh Atashzar) NYU 기계공학과·전기및컴퓨터공학과 교수가 공동프로그램 위원장을 맡았다. 명예 조직위원장인 린다 밀스(LInda G. Mills) NYU 총장은 축사를 통해 대한민국 및 KAIST와 협력하는 파트너십의 중요성을 역설했다.
학술대회가 열린 나흘 동안 7개의 워크숍이 열려 4명의 기조 연사 발표와 더불어 200여 편의 연구자 논문 발표가 이루어졌다.
자데브 드사이(Jaydev P. Desai), 조지아텍 교수는 '로봇 공학이 경피적 및 혈관 내 시술 분야에서 직면하고 있는 어려움과 가능성(Challenges and Opportunities in Robotics for Transcatheter and Endovascular Interventions)'을 주제로 심장 판막 질환인 승모판 역류를 해결하기 위해 승모판 삽입물을 전달하는 로봇 솔루션 개발 및 로봇으로 조종할 수 있는 가이드와이어 개발에 대하여 발표했다.
사미 하다딘(Sami Haddadin), 뮌헨공대 교수는 '스스로 학습하며 환경과 상호작용 하는 로봇 개발(building the machine and learning the self)'을 주제로 발표했다. 로봇이 환경과 상호작용하며 물체를 조작할 수 있도록 만드는 것이 로봇공학 분야에서 매우 중요한 과제이지만, 여전히 많은 부분 해결되지 않았다는 점을 강조하고 스스로 학습해 주변 환경과 상호작용하는 로봇시스템 개발을 소개했다.
카차 몸바우(Katja Mombaur) 카스루공대 교수는 '인간형로봇의 실세계에서의 행동지능 (Motion intelligence for humanoid robots in the real world: the roles of bio-inspiration and computational methods)'을 주제로 인간 운동의 일반 원칙을 수학적으로 모델링하고, 모델에 기반한 방법과 모델 자유 접근 방식을 결합하여 설계된 인간형 로봇의 적응형 동작 제어 방법을 강연했다.
정순조 캘리포니아 공과대학교 교수는 '로봇 학습에서 컨트랙션의 중요성(Contraction is all you need in Robot learning)' 강연을 통해 실험실에서 직접 개발한 세계 최초의 날 수 있는 휴머노이드 로봇을 비롯해 새로운 개념의 학습 기반 계층적 최적제어 방법을 적용한 다양한 실용적 비행로봇 시스템에 관해 이야기했다.
학회 마지막 날에는 참가자들이 NYU의 로봇 관련 연구실을 둘러보는 테크 투어 프로그램이 진행돼 ▴ 수술로봇·햅틱 및 상호작용 로봇·뇌파기판 인터페이스 등을 연구하는 파록 아타시자 교수의 '메디컬 및 상호작용 지능로봇 실험실(Medical Robotics and Interactive Intelligent Technologies Lab)' ▴ 변화하는 주변 환경에 민첩하게 대응할 수 있는 다중로봇의 자율성 개발 분야 연구를 수행하는 주세피 로이아노 교수의 '민첩한 로봇 및 인지 실험실(Agile Robotics and Perception Lab)' ▴ 제어, 네트워크, 비선형 동역학에 기반을 둔 물리시스템의 모델링, 해석, 그리고 소프트로봇 응용시스템을 개발하는 마우리지오 포리리(Maurizio Porfiri) 교수의 '동역학 실험실 (Dynamical Systems Lab)' 등을 방문했다.
이번 학술대회에는 한국로봇학회 차기회장으로 선출된 김정 기계공학과 학과장을 포함해 박형순, 김진환, 박해원 기계공학과 교수와 명현 전기및전자공학부 교수, 이동만 전산학부 교수 등 로봇 분야를 연구하는 다수의 우리 대학 교수와 NYU의 로봇 및 제어 관련 분야 교수도 전원 참석해 뜻깊은 학술교류의 시간을 가졌다.
이와 함께, 김정 기계공학과 학과장은 카츠오 쿠라바야시(Katsuo Kurabayashi) NYU 기계항공공학과 학과장과 양 학과의 협력을 논의하는 등 우리 대학과 NYU의 가시적인 협력의 성과를 확인할 수 있는 의미 있는 행사로 평가됐다. 공동조직위원장으로 행사를 총괄한 유지환 건설및환경공학과 교수는 "KAIST-NYU 로봇연구센터가 주관한 이번 학술대회를 뉴욕에서 성공적으로 개최하게 되어 기쁘게 생각하고, 이를 기반으로 유비쿼터스 로봇 학회가 로봇 분야 중·소규모 학술대회로서 세계적인 입지를 확실하게 다지는 계기를 마련할 것"이라고 밝혔다.
2024.07.05 조회수 5806
제21회 Ubiquitous Robots 2024 국제학술대회 개최
우리 대학이 한국로봇학회, 뉴욕대학교(이하 NYU)와 공동으로 '제21회 Ubiquitous Robots 2024 국제학술대회'를 지난달 24일부터 4일간 개최했다. 'KAIST-NYU 로보틱스 연구센터'의 주관으로 NYU 킴멜센터에서 열린 이번 학술대회는 유지환 건설및환경공학과 교수와 주세피 로이아노(Giuseppe Loianno) NYU 전기및컴퓨터공학과 교수가 공동조직위원장을 맡고 경기욱 기계공학과 교수와 파록 아타시자(Farokh Atashzar) NYU 기계공학과·전기및컴퓨터공학과 교수가 공동프로그램 위원장을 맡았다. 명예 조직위원장인 린다 밀스(LInda G. Mills) NYU 총장은 축사를 통해 대한민국 및 KAIST와 협력하는 파트너십의 중요성을 역설했다.
학술대회가 열린 나흘 동안 7개의 워크숍이 열려 4명의 기조 연사 발표와 더불어 200여 편의 연구자 논문 발표가 이루어졌다.
자데브 드사이(Jaydev P. Desai), 조지아텍 교수는 '로봇 공학이 경피적 및 혈관 내 시술 분야에서 직면하고 있는 어려움과 가능성(Challenges and Opportunities in Robotics for Transcatheter and Endovascular Interventions)'을 주제로 심장 판막 질환인 승모판 역류를 해결하기 위해 승모판 삽입물을 전달하는 로봇 솔루션 개발 및 로봇으로 조종할 수 있는 가이드와이어 개발에 대하여 발표했다.
사미 하다딘(Sami Haddadin), 뮌헨공대 교수는 '스스로 학습하며 환경과 상호작용 하는 로봇 개발(building the machine and learning the self)'을 주제로 발표했다. 로봇이 환경과 상호작용하며 물체를 조작할 수 있도록 만드는 것이 로봇공학 분야에서 매우 중요한 과제이지만, 여전히 많은 부분 해결되지 않았다는 점을 강조하고 스스로 학습해 주변 환경과 상호작용하는 로봇시스템 개발을 소개했다.
카차 몸바우(Katja Mombaur) 카스루공대 교수는 '인간형로봇의 실세계에서의 행동지능 (Motion intelligence for humanoid robots in the real world: the roles of bio-inspiration and computational methods)'을 주제로 인간 운동의 일반 원칙을 수학적으로 모델링하고, 모델에 기반한 방법과 모델 자유 접근 방식을 결합하여 설계된 인간형 로봇의 적응형 동작 제어 방법을 강연했다.
정순조 캘리포니아 공과대학교 교수는 '로봇 학습에서 컨트랙션의 중요성(Contraction is all you need in Robot learning)' 강연을 통해 실험실에서 직접 개발한 세계 최초의 날 수 있는 휴머노이드 로봇을 비롯해 새로운 개념의 학습 기반 계층적 최적제어 방법을 적용한 다양한 실용적 비행로봇 시스템에 관해 이야기했다.
학회 마지막 날에는 참가자들이 NYU의 로봇 관련 연구실을 둘러보는 테크 투어 프로그램이 진행돼 ▴ 수술로봇·햅틱 및 상호작용 로봇·뇌파기판 인터페이스 등을 연구하는 파록 아타시자 교수의 '메디컬 및 상호작용 지능로봇 실험실(Medical Robotics and Interactive Intelligent Technologies Lab)' ▴ 변화하는 주변 환경에 민첩하게 대응할 수 있는 다중로봇의 자율성 개발 분야 연구를 수행하는 주세피 로이아노 교수의 '민첩한 로봇 및 인지 실험실(Agile Robotics and Perception Lab)' ▴ 제어, 네트워크, 비선형 동역학에 기반을 둔 물리시스템의 모델링, 해석, 그리고 소프트로봇 응용시스템을 개발하는 마우리지오 포리리(Maurizio Porfiri) 교수의 '동역학 실험실 (Dynamical Systems Lab)' 등을 방문했다.
이번 학술대회에는 한국로봇학회 차기회장으로 선출된 김정 기계공학과 학과장을 포함해 박형순, 김진환, 박해원 기계공학과 교수와 명현 전기및전자공학부 교수, 이동만 전산학부 교수 등 로봇 분야를 연구하는 다수의 우리 대학 교수와 NYU의 로봇 및 제어 관련 분야 교수도 전원 참석해 뜻깊은 학술교류의 시간을 가졌다.
이와 함께, 김정 기계공학과 학과장은 카츠오 쿠라바야시(Katsuo Kurabayashi) NYU 기계항공공학과 학과장과 양 학과의 협력을 논의하는 등 우리 대학과 NYU의 가시적인 협력의 성과를 확인할 수 있는 의미 있는 행사로 평가됐다. 공동조직위원장으로 행사를 총괄한 유지환 건설및환경공학과 교수는 "KAIST-NYU 로봇연구센터가 주관한 이번 학술대회를 뉴욕에서 성공적으로 개최하게 되어 기쁘게 생각하고, 이를 기반으로 유비쿼터스 로봇 학회가 로봇 분야 중·소규모 학술대회로서 세계적인 입지를 확실하게 다지는 계기를 마련할 것"이라고 밝혔다.
2024.07.05 조회수 5806 -
 명현 교수팀, 국제 로봇-자동화 학술대회 슬램(SLAM) 챌린지 2관왕, 저널 최우수논문상 수상
우리 대학 전기및전자공학부 명현 교수 연구실(Urban Robotics lab)의 "Urban Robotics Lab @ KAIST”와, "URL @ KAIST” 두 팀이 5월 29일부터 6월 2일 동안 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회(참가자 7천여 명)인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 내에서 개최된 힐티 슬램 챌린지(HILTI SLAM Challenge)에서 각각 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다고 9일 밝혔다.
※ 팀 구성
- Urban Robotics Lab @ KAIST (라이다 부문): 임형태 박사, 김대범, 신건희 석사과정, 이대한 인턴, 명현 교수 (KAIST), URL @ KAIST (비전 부문): 임현준 박사과정, 명현 교수 (KAIST)
힐티 슬램 챌린지 2023은 로봇 분야에서 가장 저명한 IEEE ICRA 학회의 미래 건설 워크샵 (Future of Construction Workshop) 프로그램의 일부로, 리히텐슈타인 공국의 힐티(HILTI) 사와 영국 옥스퍼드 대학의 옥스퍼드 로봇 연구소(Oxford Robotics Institute), 스위스 취리히 공대의 로봇 인지 그룹(Robotics and Perception Group)이 함께 주최했다. 본 대회는 공사환경이나 특징점이 부족한 좁은 실내 환경, 어두운 환경 등 기존 위치 측정 및 동시 지도화(Simultaneous Localization And Mapping, 이하 SLAM) 알고리즘이 동작하기 어려운 환경에서도 강인하게 동작할 수 있는 SLAM 알고리즘을 개발해 정확한 매핑을 하는 대회다. 본 대회에 총 80여 팀의 해외 유수 기업과 연구팀들이 참가했다. 특히, 이번 대회는 2021년도부터 꾸준히 개최되어, 현재는 ICRA 내의 대회 중에서도 저명한 대회 중 하나로 손꼽힌다.
연구팀은 자체 개발한 주변 환경의 특징에 따른 적응형 라이다-관성 주행계(AdaLIO: Adaptive LiDAR-Inertial Odometry) 알고리즘과 다양한 최적화 프레임워크(Pose Graph Optimization)를 활용해 라이다(LiDAR) 세션에서 총 63팀 중 전체 1위를 하였고, 비전 부문에서는 자체 개발한 직선 특징 기반의 강인한 비전-관성 주행계 알고리즘(UV-SLAM)을 활용해 학계 1위 (전체 2위)를 수상했다. 또한 부상으로 상금 3,000 CHF(스위스 프랑)와 1,000 CHF를 각각 받을 예정이다. 연구팀은 2022년에 처음 출전해 학계 2위 (전체 4위)를 수상한 바 있다.
참고로 SLAM 기술은 자율주행(자율차/자율로봇), 자율보행, 자율비행, 자율운항 등의 핵심이 되는 위치인식 및 맵 작성을 동시에 하는 기술이다.
한편, 명현 교수 연구팀의 오민호 박사과정, 정의곤 석사(현 네이버랩스 소속), 임형태 박사, 송원호 박사과정, 허수민 석사(현 스트라드비전 소속), 이응창 박사과정이 LIG넥스원과의 산학협업을 통해 작성한 논문이 동일 학술대회인 2023 IEEE ICRA 기간 중 6월 1일 열린 시상식에서 2022년 IEEE 국제 로봇/자동화 저널(RA-L, Robotics and Automation Letter) 최우수 논문상(Best paper award)을 수상했다.
※ 저자 구성
오민호 박사과정, 정의곤 석사, 임형태 박사, 송원호 박사과정, 허수민 석사, 이응창 박사과정 (이상 KAIST), 박정희 선임연구원, 김재경 단장, 이장우 선임연구원 (이상 LIG넥스원), 명현 교수 (KAIST)
연구팀의 논문은 세계적 권위 저널인 RA-L에 2022년 한해 동안 출간된 1,100여 편의 논문 중 편집위원회의 심사를 거쳐 5편의 최우수 논문 중 한편으로 선정됐고, 상패와 함께 상금을 수여받을 예정이다. (논문 제목: “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans”)
본 논문에서 명현 교수 연구팀은 미지의 탐사 환경에서도 지상 로봇이 안전하게 작동하며 임무를 수행할 수 있는 자율주행 시스템을 제안했다. 특히, 지상 로봇이 도심 환경 및 숲과 같은 험난한 비정형 환경과 같은 다양한 환경에서도 그래프 구조 기반의 이동 가능 영역 탐지 및 주변 환경의 객체 인식을 통해 실시간으로 자율주행이 가능하도록 솔루션을 제안했다.
또한, 연구팀은 실제 자율주행 시스템에 적용하여 실용성을 입증한 바 있으며, 해당 기술을 공개함으로써 로봇 자율 주행 기술 발전에 이바지했다. (공개 링크: https://github.com/url-kaist/TRAVEL)
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.
2023.06.09 조회수 9558
명현 교수팀, 국제 로봇-자동화 학술대회 슬램(SLAM) 챌린지 2관왕, 저널 최우수논문상 수상
우리 대학 전기및전자공학부 명현 교수 연구실(Urban Robotics lab)의 "Urban Robotics Lab @ KAIST”와, "URL @ KAIST” 두 팀이 5월 29일부터 6월 2일 동안 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회(참가자 7천여 명)인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 내에서 개최된 힐티 슬램 챌린지(HILTI SLAM Challenge)에서 각각 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다고 9일 밝혔다.
※ 팀 구성
- Urban Robotics Lab @ KAIST (라이다 부문): 임형태 박사, 김대범, 신건희 석사과정, 이대한 인턴, 명현 교수 (KAIST), URL @ KAIST (비전 부문): 임현준 박사과정, 명현 교수 (KAIST)
힐티 슬램 챌린지 2023은 로봇 분야에서 가장 저명한 IEEE ICRA 학회의 미래 건설 워크샵 (Future of Construction Workshop) 프로그램의 일부로, 리히텐슈타인 공국의 힐티(HILTI) 사와 영국 옥스퍼드 대학의 옥스퍼드 로봇 연구소(Oxford Robotics Institute), 스위스 취리히 공대의 로봇 인지 그룹(Robotics and Perception Group)이 함께 주최했다. 본 대회는 공사환경이나 특징점이 부족한 좁은 실내 환경, 어두운 환경 등 기존 위치 측정 및 동시 지도화(Simultaneous Localization And Mapping, 이하 SLAM) 알고리즘이 동작하기 어려운 환경에서도 강인하게 동작할 수 있는 SLAM 알고리즘을 개발해 정확한 매핑을 하는 대회다. 본 대회에 총 80여 팀의 해외 유수 기업과 연구팀들이 참가했다. 특히, 이번 대회는 2021년도부터 꾸준히 개최되어, 현재는 ICRA 내의 대회 중에서도 저명한 대회 중 하나로 손꼽힌다.
연구팀은 자체 개발한 주변 환경의 특징에 따른 적응형 라이다-관성 주행계(AdaLIO: Adaptive LiDAR-Inertial Odometry) 알고리즘과 다양한 최적화 프레임워크(Pose Graph Optimization)를 활용해 라이다(LiDAR) 세션에서 총 63팀 중 전체 1위를 하였고, 비전 부문에서는 자체 개발한 직선 특징 기반의 강인한 비전-관성 주행계 알고리즘(UV-SLAM)을 활용해 학계 1위 (전체 2위)를 수상했다. 또한 부상으로 상금 3,000 CHF(스위스 프랑)와 1,000 CHF를 각각 받을 예정이다. 연구팀은 2022년에 처음 출전해 학계 2위 (전체 4위)를 수상한 바 있다.
참고로 SLAM 기술은 자율주행(자율차/자율로봇), 자율보행, 자율비행, 자율운항 등의 핵심이 되는 위치인식 및 맵 작성을 동시에 하는 기술이다.
한편, 명현 교수 연구팀의 오민호 박사과정, 정의곤 석사(현 네이버랩스 소속), 임형태 박사, 송원호 박사과정, 허수민 석사(현 스트라드비전 소속), 이응창 박사과정이 LIG넥스원과의 산학협업을 통해 작성한 논문이 동일 학술대회인 2023 IEEE ICRA 기간 중 6월 1일 열린 시상식에서 2022년 IEEE 국제 로봇/자동화 저널(RA-L, Robotics and Automation Letter) 최우수 논문상(Best paper award)을 수상했다.
※ 저자 구성
오민호 박사과정, 정의곤 석사, 임형태 박사, 송원호 박사과정, 허수민 석사, 이응창 박사과정 (이상 KAIST), 박정희 선임연구원, 김재경 단장, 이장우 선임연구원 (이상 LIG넥스원), 명현 교수 (KAIST)
연구팀의 논문은 세계적 권위 저널인 RA-L에 2022년 한해 동안 출간된 1,100여 편의 논문 중 편집위원회의 심사를 거쳐 5편의 최우수 논문 중 한편으로 선정됐고, 상패와 함께 상금을 수여받을 예정이다. (논문 제목: “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans”)
본 논문에서 명현 교수 연구팀은 미지의 탐사 환경에서도 지상 로봇이 안전하게 작동하며 임무를 수행할 수 있는 자율주행 시스템을 제안했다. 특히, 지상 로봇이 도심 환경 및 숲과 같은 험난한 비정형 환경과 같은 다양한 환경에서도 그래프 구조 기반의 이동 가능 영역 탐지 및 주변 환경의 객체 인식을 통해 실시간으로 자율주행이 가능하도록 솔루션을 제안했다.
또한, 연구팀은 실제 자율주행 시스템에 적용하여 실용성을 입증한 바 있으며, 해당 기술을 공개함으로써 로봇 자율 주행 기술 발전에 이바지했다. (공개 링크: https://github.com/url-kaist/TRAVEL)
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.
2023.06.09 조회수 9558 -
 기술경영학부 김지희 교수, 김태성 학술상 수상
우리 대학 김지희 기술경영학부 교수가 지난 2월 2일 한국 경제학 공동학술대회에서 2023년 김태성 학술상을 수상하였다.
김태성 학술상은 한국 경제학계에서 가장 권위있는 상 중 하나로서, 한국계량경제학회에서 만 40세 이하 젊은 경제학자들 중 연구 성과가 탁월한 경제학자를 선정하여 경제학 공동학술대회(한국계량경제학회 총회)에서 시상한다.
한국계량경제학회는 김지희 교수의 2021년 로버트 루카스 주니어 상 수상 논문인 “A Schumpeterian Model of Top Income Inequality (2018, Journal of Political Economy)”, 무역제재로 인한 북한의 경제적 손실을 인공위성 조도 데이터를 이용하여 분석하여 최근 Journal of International Economics에 조건부 게재 승인된 논문 “The Economic Costs of Trade Sanctions: Evidence from North Korea”, 또한 금융, machine learning, AI등의 분야에서 학제간 연구를 활발히 진행한 점 등을 선정 이유로 밝혔다.
2023.02.03 조회수 6585
기술경영학부 김지희 교수, 김태성 학술상 수상
우리 대학 김지희 기술경영학부 교수가 지난 2월 2일 한국 경제학 공동학술대회에서 2023년 김태성 학술상을 수상하였다.
김태성 학술상은 한국 경제학계에서 가장 권위있는 상 중 하나로서, 한국계량경제학회에서 만 40세 이하 젊은 경제학자들 중 연구 성과가 탁월한 경제학자를 선정하여 경제학 공동학술대회(한국계량경제학회 총회)에서 시상한다.
한국계량경제학회는 김지희 교수의 2021년 로버트 루카스 주니어 상 수상 논문인 “A Schumpeterian Model of Top Income Inequality (2018, Journal of Political Economy)”, 무역제재로 인한 북한의 경제적 손실을 인공위성 조도 데이터를 이용하여 분석하여 최근 Journal of International Economics에 조건부 게재 승인된 논문 “The Economic Costs of Trade Sanctions: Evidence from North Korea”, 또한 금융, machine learning, AI등의 분야에서 학제간 연구를 활발히 진행한 점 등을 선정 이유로 밝혔다.
2023.02.03 조회수 6585 -
 이현주 교수, IEEE MEMS 2025 학술대회장 선임
우리 대학 전기및전자공학부 이현주 석좌교수가 2025년 개최예정인 제38회 IEEE MEMS 국제 학술대회(International Conference on Micro Electro Mechanical Systems)의 학술대회장 (General Chair)에 선임됐다.
IEEE MEMS 학술대회는 MEMS(Micro Electro Mechanical System, 미세전자기계시스템) 분야에서 최고의 권위를 인정받는 국제컨퍼런스로, MEMS 기술로 제작되는 각종 마이크로 센서 및 액추에이터에 관한 모든 연구를 다루는 핵심 학술대회이다. 이 학술대회는 매년 800편 이상의 MEMS 분야 논문이 제출되며 엄격한 심사 프로세스를 거친 약 250편 내외의 논문을 선정해 발표하며 세계적 권위를 인정받고 있다. 특히, 대회에 제출된 논문 중 상위 10퍼센트 미만 가량만 구두 발표에 선정된다.이현주 교수는 올해 40세의 나이로 대회 역사상 최연소로 학술대회장에 선임되었으며, 2025년에 대만 국립칭화대학(National Tsing Hua University) 의 Sheng-Shian Li 교수와 공동학술대회장 직을 수행할 예정이다.
2022.04.14 조회수 8812
이현주 교수, IEEE MEMS 2025 학술대회장 선임
우리 대학 전기및전자공학부 이현주 석좌교수가 2025년 개최예정인 제38회 IEEE MEMS 국제 학술대회(International Conference on Micro Electro Mechanical Systems)의 학술대회장 (General Chair)에 선임됐다.
IEEE MEMS 학술대회는 MEMS(Micro Electro Mechanical System, 미세전자기계시스템) 분야에서 최고의 권위를 인정받는 국제컨퍼런스로, MEMS 기술로 제작되는 각종 마이크로 센서 및 액추에이터에 관한 모든 연구를 다루는 핵심 학술대회이다. 이 학술대회는 매년 800편 이상의 MEMS 분야 논문이 제출되며 엄격한 심사 프로세스를 거친 약 250편 내외의 논문을 선정해 발표하며 세계적 권위를 인정받고 있다. 특히, 대회에 제출된 논문 중 상위 10퍼센트 미만 가량만 구두 발표에 선정된다.이현주 교수는 올해 40세의 나이로 대회 역사상 최연소로 학술대회장에 선임되었으며, 2025년에 대만 국립칭화대학(National Tsing Hua University) 의 Sheng-Shian Li 교수와 공동학술대회장 직을 수행할 예정이다.
2022.04.14 조회수 8812 -
 원자력연 송철화 박사, 세계 학술대회서 'NURETH 펠로우' 수상
우리 학교 원자력 및 양자공학과를 졸업한 한국원자력연구원(원장 박원석) 혁신계통안전연구부 송철화 박사가 제19차 국제 원자로 열수력 학술대회(이하 NURETH)에서 ‘NURETH 펠로우(Fellow)’를 16일 수상하였다.
※ NURETH : International Topical Meeting on Nuclear Reactor Thermal Hydraulics
NURETH 펠로우는 미국원자력학회 열수력 부문(THD) 주도로 시상하는 최고권위 상 중 하나로, 2013년부터 2년마다 2명씩 선정하고 있다.
올해의 수상자인 송철화 박사는 지난 37년간 열수력학 및 원자로의 안전성 향상 연구개발에 매진하며 선도적인 업적을 이뤘다고 평가받았다.
열수력학은 고온고압으로 가동되는 원자로가 안전하게 설계·운영되도록 냉각재 거동 및 열전달 현상 등을 연구하는 핵심기술 분야다.
송철화 박사는 “NURTEH 펠로우 선정은 국제적으로 저명한 동료 학자들의 심사 및 추천에 따른 것이어서 더욱 영광스럽게 여겨진다”며, “함께 연구해 온 국내 후배 연구자들에게도 많은 국제활동과 수상의 기회가 있길 응원한다”고 소감을 밝혔다.
2022.03.24 조회수 7456
원자력연 송철화 박사, 세계 학술대회서 'NURETH 펠로우' 수상
우리 학교 원자력 및 양자공학과를 졸업한 한국원자력연구원(원장 박원석) 혁신계통안전연구부 송철화 박사가 제19차 국제 원자로 열수력 학술대회(이하 NURETH)에서 ‘NURETH 펠로우(Fellow)’를 16일 수상하였다.
※ NURETH : International Topical Meeting on Nuclear Reactor Thermal Hydraulics
NURETH 펠로우는 미국원자력학회 열수력 부문(THD) 주도로 시상하는 최고권위 상 중 하나로, 2013년부터 2년마다 2명씩 선정하고 있다.
올해의 수상자인 송철화 박사는 지난 37년간 열수력학 및 원자로의 안전성 향상 연구개발에 매진하며 선도적인 업적을 이뤘다고 평가받았다.
열수력학은 고온고압으로 가동되는 원자로가 안전하게 설계·운영되도록 냉각재 거동 및 열전달 현상 등을 연구하는 핵심기술 분야다.
송철화 박사는 “NURTEH 펠로우 선정은 국제적으로 저명한 동료 학자들의 심사 및 추천에 따른 것이어서 더욱 영광스럽게 여겨진다”며, “함께 연구해 온 국내 후배 연구자들에게도 많은 국제활동과 수상의 기회가 있길 응원한다”고 소감을 밝혔다.
2022.03.24 조회수 7456 -
 전산학부 이의진 교수, ACM UbiComp'21 학회 프로그램 위원장 선임
우리 대학 전산학부 이의진 교수가 오는 9월 21-26일 동안 온라인으로 열리는 ACM UbiComp 학회(International Joint Conference on Pervasive and Ubiquitous Computing)의 프로그램 위원장(Program Chair)으로 선임되어 학술 프로그램 조직을 총괄하게 됐다.
ACM UbiComp 학회는 모바일, 웨어러블, 사물인터넷(IoT), 가상/증강 현실(AR/VR)을 포함하는 차세대 컴퓨팅 환경을 위한 유비쿼터스 컴퓨팅 시스템 디자인, 개발, 실증, 이해에 관한 연구를 공유하는 국제 최고 권위의 학술대회다.
올해는 분야의 선구자인 고(故) 마크 와이저(Mark Weiser) 박사의 “유비쿼터스 컴퓨팅” 비전 선포 30주년을 맞이하여 노스웨스턴 대학의 Gregory Abowd 교수 등 주요학자들이 “미래 연구 방향”에 대해 논의를 진행할 예정이다. 230편 이상의 학술논문 발표, 38편의 포스터/데모, 11개의 워크샵, 4개의 튜토리얼, 박사 심포지움 등 다양한 학술교류 프로그램이 온라인으로 진행될 예정이다.
이의진 교수는 ACM UbiComp학회에 한국인으로서는 가장 많은 수의 논문을 출판하였으며 유비쿼터스 컴퓨팅 분야에 기여한 공로를 바탕으로 2021년도 프로그램위원장에 선임되었다.
UbiComp 학술대회 홈페이지: https://www.ubicomp.org/ubicomp2021/
2021.08.06 조회수 9354
전산학부 이의진 교수, ACM UbiComp'21 학회 프로그램 위원장 선임
우리 대학 전산학부 이의진 교수가 오는 9월 21-26일 동안 온라인으로 열리는 ACM UbiComp 학회(International Joint Conference on Pervasive and Ubiquitous Computing)의 프로그램 위원장(Program Chair)으로 선임되어 학술 프로그램 조직을 총괄하게 됐다.
ACM UbiComp 학회는 모바일, 웨어러블, 사물인터넷(IoT), 가상/증강 현실(AR/VR)을 포함하는 차세대 컴퓨팅 환경을 위한 유비쿼터스 컴퓨팅 시스템 디자인, 개발, 실증, 이해에 관한 연구를 공유하는 국제 최고 권위의 학술대회다.
올해는 분야의 선구자인 고(故) 마크 와이저(Mark Weiser) 박사의 “유비쿼터스 컴퓨팅” 비전 선포 30주년을 맞이하여 노스웨스턴 대학의 Gregory Abowd 교수 등 주요학자들이 “미래 연구 방향”에 대해 논의를 진행할 예정이다. 230편 이상의 학술논문 발표, 38편의 포스터/데모, 11개의 워크샵, 4개의 튜토리얼, 박사 심포지움 등 다양한 학술교류 프로그램이 온라인으로 진행될 예정이다.
이의진 교수는 ACM UbiComp학회에 한국인으로서는 가장 많은 수의 논문을 출판하였으며 유비쿼터스 컴퓨팅 분야에 기여한 공로를 바탕으로 2021년도 프로그램위원장에 선임되었다.
UbiComp 학술대회 홈페이지: https://www.ubicomp.org/ubicomp2021/
2021.08.06 조회수 9354 -
 2021 국제 양자내성암호 학술대회 공동 개최
우리대학이 7월 20일(화)부터 22일(목)까지 3일간 대전컨벤션센터에서 양자내성 암호에 관한 세계 최고의 학술대회인 ʻ2021 국제양자내성암호 학술대회(Post Quantum Cryptography, PQCrypto)ʼ를 한국전자통신연구원(ETRI)과 비대면 방식으로 공동 개최한다.
국제 양자내성암호 학술대회는 양자컴퓨터 기술에 적용할 수 있는 차세대 암호 및 인증 기술에 대한 최신 연구 결과와 정보를 공유는 자리다. 2006년부터 유럽·미주·아시아를 순회하여 개최되고 있으며, 올해는 코로나 19의 세계적인 대유행으로 인해 온라인 화상회의 프로그램인 줌(Zoom)과 유튜브(Youtube)를 통해 발표와 토론을 진행할 예정이다. 우리가 현재 사용하고 있는 암호 체계는 0 또는 1만을 사용하는 디지털 정보로 구성되어 있으며, ʻ정수론적 어려움ʼ의 문제를 근거로 안전하다는 평가를 받고 있다. 예를 들면 합성수를 소인수 분해하는 것이 어렵다는 문제 등이다. 그러나 0이면서 1이기도 한 양자 상태의 정보 결합과 중첩 현상을 이용하는 양자컴퓨터 기술로 공격할 경우, 소인수분해 문제를 쉽게 풀 수 있어 현재 암호는 치명적인 결함을 갖게 된다. 양자컴퓨터를 이용해 공격해도 해독할 수 없는 안전한 양자내성 암호를 조속히 연구 개발해 보급해야 하는 이유다. 이번 학술대회에는 미국 국립표준기술연구소(National Institute of Standards and Technology, NIST)의 양자내성 암호 표준 개발 책임자인 더스틴 무디(Dustin Moody) 박사와 프랑스 리옹 고등 사범학교(École Normale Supérieure de Lyon)의 컴퓨터공학과 데미안 스텔레(Damien Stehle) 학부장의 초청 강연을 비롯해 25편의 엄선한 최신 논문이 발표된다. 또한, 국가 정보통신 인프라를 양자내성암호 방식으로 전환하기 위한 한국·일본·프랑스의 준비 상황도 참석자들과 공유할 예정이다. 미국 표준기술연구소는 2017년부터 전 세계 연구자들을 대상으로 양자내성암호를 주제로 한 공모를 진행했다. 그 결과, 80개의 알고리즘을 접수했으며, 현재 7개의 암호 방식과 8개의 후보 암호 방식을 선정한 상태다. 조만간 최종 방식을 결정해 공개할 것이라는 세간의 기대를 받고 있다. 이번 학술대회에서는 래티스(Lattice)를 이용한 난제, 다변수 다항식 문제를 이용한 방식, 부호 문제를 이용한 방식, 아이소제니(Isogeny)를 이용한 방식, 해시함수(Hash function)를 이용한 방식 등 최근 학계에서 활발하게 다뤄지고 있는 새로운 연구 방식 및 기존 방식을 해독하는 연구 등이 발표된다. 또한, 양자 컴퓨터를 이용한 안전성 분석과 부채널 정보를 이용한 공격 방식 등에 관한 최신 연구 성과도 공유된다. 이번 행사의 총괄을 맡은 김광조 KAIST 전산학부 교수(세계암호학회 석학회원)는 "온라인을 통해 수학·전산학·전자공학·양자정보학·암호 해독 분야의 세계적인 전문가들을 한자리에 초청해 국내 양자내성암호 체계의 조기 전환 방향을 토의하기 위해 이번 학술대회를 준비했다ˮ라고 개최 배경을 밝혔다. 이어 김 교수는 "최신 사이버 공격에 대응해 장기적인 안전성을 보장하는 암호화폐 및 블록체인, 5G 및 6G 이동통신의 암호 체계, 차세대 인터넷 보안 기술, 프라이버시 보호 기술 등을 배울 수 있는 소중한 기회가 되어 세계 수준의 전문 인력을 양성하는 일에도 기여할 수 있을 것ˮ이라고 강조했다.우리나라 시간을 기준으로 20일 오후 1시에 시작되는 이번 행사는 35개국 출신의 연구자 400여 명이 사전 등록을 완료했다. 행사의 모든 순서는 유튜브로 중계되며 전 세계에서 최소 10만 명 이상이 참여할 것으로 기대를 모으고 있다. ʻ2021 국제양자내성암호 학술대회ʼ와 관련한 자세한 안내사항 및 무료 참여 등록 절차는 홈페이지( https://pqcrypto2021.kr )에서 확인할 수 있다.
2021.07.19 조회수 11381
2021 국제 양자내성암호 학술대회 공동 개최
우리대학이 7월 20일(화)부터 22일(목)까지 3일간 대전컨벤션센터에서 양자내성 암호에 관한 세계 최고의 학술대회인 ʻ2021 국제양자내성암호 학술대회(Post Quantum Cryptography, PQCrypto)ʼ를 한국전자통신연구원(ETRI)과 비대면 방식으로 공동 개최한다.
국제 양자내성암호 학술대회는 양자컴퓨터 기술에 적용할 수 있는 차세대 암호 및 인증 기술에 대한 최신 연구 결과와 정보를 공유는 자리다. 2006년부터 유럽·미주·아시아를 순회하여 개최되고 있으며, 올해는 코로나 19의 세계적인 대유행으로 인해 온라인 화상회의 프로그램인 줌(Zoom)과 유튜브(Youtube)를 통해 발표와 토론을 진행할 예정이다. 우리가 현재 사용하고 있는 암호 체계는 0 또는 1만을 사용하는 디지털 정보로 구성되어 있으며, ʻ정수론적 어려움ʼ의 문제를 근거로 안전하다는 평가를 받고 있다. 예를 들면 합성수를 소인수 분해하는 것이 어렵다는 문제 등이다. 그러나 0이면서 1이기도 한 양자 상태의 정보 결합과 중첩 현상을 이용하는 양자컴퓨터 기술로 공격할 경우, 소인수분해 문제를 쉽게 풀 수 있어 현재 암호는 치명적인 결함을 갖게 된다. 양자컴퓨터를 이용해 공격해도 해독할 수 없는 안전한 양자내성 암호를 조속히 연구 개발해 보급해야 하는 이유다. 이번 학술대회에는 미국 국립표준기술연구소(National Institute of Standards and Technology, NIST)의 양자내성 암호 표준 개발 책임자인 더스틴 무디(Dustin Moody) 박사와 프랑스 리옹 고등 사범학교(École Normale Supérieure de Lyon)의 컴퓨터공학과 데미안 스텔레(Damien Stehle) 학부장의 초청 강연을 비롯해 25편의 엄선한 최신 논문이 발표된다. 또한, 국가 정보통신 인프라를 양자내성암호 방식으로 전환하기 위한 한국·일본·프랑스의 준비 상황도 참석자들과 공유할 예정이다. 미국 표준기술연구소는 2017년부터 전 세계 연구자들을 대상으로 양자내성암호를 주제로 한 공모를 진행했다. 그 결과, 80개의 알고리즘을 접수했으며, 현재 7개의 암호 방식과 8개의 후보 암호 방식을 선정한 상태다. 조만간 최종 방식을 결정해 공개할 것이라는 세간의 기대를 받고 있다. 이번 학술대회에서는 래티스(Lattice)를 이용한 난제, 다변수 다항식 문제를 이용한 방식, 부호 문제를 이용한 방식, 아이소제니(Isogeny)를 이용한 방식, 해시함수(Hash function)를 이용한 방식 등 최근 학계에서 활발하게 다뤄지고 있는 새로운 연구 방식 및 기존 방식을 해독하는 연구 등이 발표된다. 또한, 양자 컴퓨터를 이용한 안전성 분석과 부채널 정보를 이용한 공격 방식 등에 관한 최신 연구 성과도 공유된다. 이번 행사의 총괄을 맡은 김광조 KAIST 전산학부 교수(세계암호학회 석학회원)는 "온라인을 통해 수학·전산학·전자공학·양자정보학·암호 해독 분야의 세계적인 전문가들을 한자리에 초청해 국내 양자내성암호 체계의 조기 전환 방향을 토의하기 위해 이번 학술대회를 준비했다ˮ라고 개최 배경을 밝혔다. 이어 김 교수는 "최신 사이버 공격에 대응해 장기적인 안전성을 보장하는 암호화폐 및 블록체인, 5G 및 6G 이동통신의 암호 체계, 차세대 인터넷 보안 기술, 프라이버시 보호 기술 등을 배울 수 있는 소중한 기회가 되어 세계 수준의 전문 인력을 양성하는 일에도 기여할 수 있을 것ˮ이라고 강조했다.우리나라 시간을 기준으로 20일 오후 1시에 시작되는 이번 행사는 35개국 출신의 연구자 400여 명이 사전 등록을 완료했다. 행사의 모든 순서는 유튜브로 중계되며 전 세계에서 최소 10만 명 이상이 참여할 것으로 기대를 모으고 있다. ʻ2021 국제양자내성암호 학술대회ʼ와 관련한 자세한 안내사항 및 무료 참여 등록 절차는 홈페이지( https://pqcrypto2021.kr )에서 확인할 수 있다.
2021.07.19 조회수 11381 -
 제18회 이산화탄소 활용에 관한 국제학술대회 개최
우리 대학은 7월 18일(일)부터 22일(목)까지 5일간 `제18회 이산화탄소 활용에 관한 국제학술대회(18th International Conference on Carbon Dioxide Utilization, 이하 ICCDU 2021)'를 개최한다.
기후변화에 대응하기 위한 ‘이산화탄소의 포집 및 활용 기술’을 주제로 열리는 이번 학술대회에는 미국 공학한림원 회원인 이산화탄소 전환 부분의 세계적인 학자인 량시판(L.S. Fan) 오하이오 주립대학 교수와 이상엽 우리 대학 연구부총장을 포함해 재료공학·화학·생명화학공학 분야의 세계적인 석학 31명이 강연자로 참여하며, 온라인 화상회의 프로그램인 줌(Zoom)을 통해 진행된다.
이산화탄소 활용에 관한 국제학술 대회 (ICCDU)는 탄소 포집, 저장 및 활용에 관한 연구를 위해 1991년 설립되어 국·내외 저명한 석학들이 참하는 정보 교류의 장으로 자리매김했다. 이번 국제학술대회에는 전 세계 250여명의 연구자들이 참여한다. 또한, ▴이산화탄소의 열적/촉매 전환(Thermal and catalytic conversion) ▴전기화학적/광화학적 전환(Electrochemical and Photochemical conversion) ▴생명공학공정 ▴이산화탄소 포집 공정 기술, ▴이산화탄소 활용 기술의 전 과정 평가(Life-cycle assessment) 및 기술 경제성 분석 (Techno-economic analysis) 등 크게 5개의 주제를 아우르는 재료공학·화학·화학공학 분야에서 130여 편에 달하는 혁신적인 기술과 최신 성과들이 제공될 예정이다.
미국과 영연방 소속이 아닌 과학자 중 유일하게 세계 3대 아카데미(미국공학한림원, 미국국립과학원, 영국왕립학회) 회원에 동시에 선임된 석학인 이상엽 KAIST 교수, 엘스비어가 발행하는 미립자 분야 대표적 학술지인 미립자기술학술지(Powder Technology) 편집장 량시판(Liang-Shih Fan) 오하이오 주립대학 교수, 국제플라즈마화학학회(International Plasma Chemistry Society) 이사회 이사 및 부회장을 맡은 안네미 보가츠(Annemie Bogaerts) 앤트워프 대학 교수, 중국촉매학술지 부편집장 타오 장(Tao Zhang) 중국과학원 교수, SK이노베이션 최고기술경영자인 이성준 환경과학기술원장, 미국화학회가 발행하는 촉매분야 대표적 학술지인 촉매학술지(ACS Catalysis) 편집장을 역임하고 현재는 오픈어세스 미국화학회지(JACS Au) 편집장을 맡은 크리스토퍼 존스(Christopher W. Jones.) 조지아 공과대학 교수 등 국·내외를 아우르는 세계적인 석학들이 학계에서 새롭게 떠오르는 유망 이산화탄소 활용 연구 현황을 발표한다.
이를 위해, 세계적 학술 출판사 엘스비어(Elsevier)가 발행하는 이산화탄소 활용 분야 대표적 학술지인 이산화탄소 활용 학술지(Journal of CO2 Utilization, 편집장: 박상언 인하대 교수, Impact factor: 7.132)와 한국화학공학 학술지(Korean Journal of Chemical Engineering, 편집장: 이재형 우리 대학 교수, Impact factor: 3.309)에서는 이산화탄소 발생 저감과 지속 가능한 사회 설립을 위한 첨단 공학 분야의 성과를 공유하기 위해 특별호를 발간할 예정이다.
매년 세계 다른 지역에서 개최되어 온 ICCDU는 코로나19로 인해 올해는 학술대회 역사상 최초로 온라인으로 개최되며, 우리 대학 생명화학공학과와 한국화학공학회가 행사를 주관한다. 이번 행사의 총괄을 맡은 이재우 교수(생명화학공학과 학과장, Journal of CO2 Utilization 편집위원)는 "ICCDU 2021의 개최는 인류가 직면한 기후 변화를 해결하기 위해 전 세계 석학들이 학술교류 및 네트워킹의 장을 형성할 수 있는 소중한 기회가 될 것”이라고 강조했다.
이번 행사와 관련한 자세한 정보와 등록은 홈페이지(http://iccdu2021.org/)에서 확인할 수 있다.
2021.07.19 조회수 12948
제18회 이산화탄소 활용에 관한 국제학술대회 개최
우리 대학은 7월 18일(일)부터 22일(목)까지 5일간 `제18회 이산화탄소 활용에 관한 국제학술대회(18th International Conference on Carbon Dioxide Utilization, 이하 ICCDU 2021)'를 개최한다.
기후변화에 대응하기 위한 ‘이산화탄소의 포집 및 활용 기술’을 주제로 열리는 이번 학술대회에는 미국 공학한림원 회원인 이산화탄소 전환 부분의 세계적인 학자인 량시판(L.S. Fan) 오하이오 주립대학 교수와 이상엽 우리 대학 연구부총장을 포함해 재료공학·화학·생명화학공학 분야의 세계적인 석학 31명이 강연자로 참여하며, 온라인 화상회의 프로그램인 줌(Zoom)을 통해 진행된다.
이산화탄소 활용에 관한 국제학술 대회 (ICCDU)는 탄소 포집, 저장 및 활용에 관한 연구를 위해 1991년 설립되어 국·내외 저명한 석학들이 참하는 정보 교류의 장으로 자리매김했다. 이번 국제학술대회에는 전 세계 250여명의 연구자들이 참여한다. 또한, ▴이산화탄소의 열적/촉매 전환(Thermal and catalytic conversion) ▴전기화학적/광화학적 전환(Electrochemical and Photochemical conversion) ▴생명공학공정 ▴이산화탄소 포집 공정 기술, ▴이산화탄소 활용 기술의 전 과정 평가(Life-cycle assessment) 및 기술 경제성 분석 (Techno-economic analysis) 등 크게 5개의 주제를 아우르는 재료공학·화학·화학공학 분야에서 130여 편에 달하는 혁신적인 기술과 최신 성과들이 제공될 예정이다.
미국과 영연방 소속이 아닌 과학자 중 유일하게 세계 3대 아카데미(미국공학한림원, 미국국립과학원, 영국왕립학회) 회원에 동시에 선임된 석학인 이상엽 KAIST 교수, 엘스비어가 발행하는 미립자 분야 대표적 학술지인 미립자기술학술지(Powder Technology) 편집장 량시판(Liang-Shih Fan) 오하이오 주립대학 교수, 국제플라즈마화학학회(International Plasma Chemistry Society) 이사회 이사 및 부회장을 맡은 안네미 보가츠(Annemie Bogaerts) 앤트워프 대학 교수, 중국촉매학술지 부편집장 타오 장(Tao Zhang) 중국과학원 교수, SK이노베이션 최고기술경영자인 이성준 환경과학기술원장, 미국화학회가 발행하는 촉매분야 대표적 학술지인 촉매학술지(ACS Catalysis) 편집장을 역임하고 현재는 오픈어세스 미국화학회지(JACS Au) 편집장을 맡은 크리스토퍼 존스(Christopher W. Jones.) 조지아 공과대학 교수 등 국·내외를 아우르는 세계적인 석학들이 학계에서 새롭게 떠오르는 유망 이산화탄소 활용 연구 현황을 발표한다.
이를 위해, 세계적 학술 출판사 엘스비어(Elsevier)가 발행하는 이산화탄소 활용 분야 대표적 학술지인 이산화탄소 활용 학술지(Journal of CO2 Utilization, 편집장: 박상언 인하대 교수, Impact factor: 7.132)와 한국화학공학 학술지(Korean Journal of Chemical Engineering, 편집장: 이재형 우리 대학 교수, Impact factor: 3.309)에서는 이산화탄소 발생 저감과 지속 가능한 사회 설립을 위한 첨단 공학 분야의 성과를 공유하기 위해 특별호를 발간할 예정이다.
매년 세계 다른 지역에서 개최되어 온 ICCDU는 코로나19로 인해 올해는 학술대회 역사상 최초로 온라인으로 개최되며, 우리 대학 생명화학공학과와 한국화학공학회가 행사를 주관한다. 이번 행사의 총괄을 맡은 이재우 교수(생명화학공학과 학과장, Journal of CO2 Utilization 편집위원)는 "ICCDU 2021의 개최는 인류가 직면한 기후 변화를 해결하기 위해 전 세계 석학들이 학술교류 및 네트워킹의 장을 형성할 수 있는 소중한 기회가 될 것”이라고 강조했다.
이번 행사와 관련한 자세한 정보와 등록은 홈페이지(http://iccdu2021.org/)에서 확인할 수 있다.
2021.07.19 조회수 12948 -
 교내 군 위탁교육장교, 국방대 국방학술대회 금상 수상 쾌거
우리 대학 문술미래전략대학원 박사과정 육군소령 장영균(지도교수 : 양재석)과 신소재공학과 석사과정 육군대위 박규순(지도교수 : 스티브박)이 국방대학교 대학원생 국방학술대회에서 금상을 수상하는 쾌거를 달성했다.
매년 국방대학교에서 열리는 국방학술대회는 안보정책, 군사전략, 국방관리, 국방과학 4개 분과에서 국방분야 우수 연구를 수상하는 대회다. 대회에서는 국방대학교, KAIST, 서울대 등 전국 각지에서 국방관련 연구를 하는 군 위탁장교와 민간학생들이 참가했다. 그 중에서 우리학교 학생은 안보정책 분과와 국방과학 분과에 참가하여 각 분과에서 1등을 해 금상(각 군 참모총장상)을 수상했다. 이를 통해 KAIST 학생들이 국가, 국방 R&D 분야에서 뛰어난 역량을 갖췄다는 사실을 알 수 있다.
현재 국군간호사관학교 교양학처 군사학교수로 재직중인 문술미래전략대학원 장영균 소령은 “Network Analysis of the US-China Hegemonic Transition”(미국과 중국의 패권전이에 대한 네트워크 분석) 이라는 연구논문을 발표했다. 이 연구는 현재 국제관계의 핵심 이슈인 미국과 중국의 패권경쟁을 네트워크 분석을 적용해 분석 및 평가한 연구로서, 심사위원들로부터 데이터에 기반한 과학적 접근을 통해 미국과 중국의 패권전이 현상을 객관적으로 분석했다는 평을 받았다. 장영균 소령은 "질적연구가 주를 이루고 있는 국제관계 분야에서 복잡계 네트워크라는 과학적 기법을 적용해 국제사회의 구조변화를 객관적으로 분석하고, 이를 기초로 국가의 미래 안보전략 수립에 기여하고 싶다"고 말했다. 장영균 소령의 수상을 통해 우리 대학이 이·공계 분야뿐만 아니라 사회과학 분야, 특히 국방 사회과학 분야에도 높은 수준을 갖추고 있음을 알 수 있다.
신소재공학과 박규순 대위는 “Development of 3D printable inks to fabricate fabric-based tactile sensors for warrior platform and robot combat system(미래 보병체계 및 로봇 전투체계 적용을 위한 직물 기반 촉각센서 제작용 3D 프린팅 용액 개발)”의 연구주제로 발표했다. 이는 현재 군이 추진하고 있는 워리어 플랫폼(Warrior Platform, 미래 보병체계)과 소프트 로봇 전투체계에 적용하기 위한 촉각센서를 개발한 것이다. 워리어 플랫폼에 촉각센서를 적용해 전투원의 모든 신체활동을 인지, 국방 데이터센터와 연계해 실제 전투나 훈련 속에서 전투원이 필요로 하는 움직임을 데이터화 할 수 있다. 이를 통해 교육훈련의 변혁을 이끌어 낼 수 있는 점에서 좋은 평가를 받았다. 또한, 전장상황 속에서는 로봇체계의 파괴나 변형이 빈번하게 이루어진다. 이러한 상황 속에서 구성품의 각도와 길이를 기반으로 역계산하는 기존의 로봇 제어시스템은 필연적으로 오차가 발생하는데, 촉각센서를 통해 파괴와 변형이 이루어진 이후의 결과를 통해 정확한 자세제어가 가능하다.
발표 당시 심사위원은 촉각센서가 우리 군에 꼭 필요한 분야라며 좋은 연구를 해주어 고맙다는 의견을 말하기도 했다.
특히, 박규순 대위는 우리 대학 석사과정 1학년 재학 중으로 위 성과는 여러 박사과정, 석사졸업예정자 학생들과 경쟁해 얻은 성과다. 또, 촉각센서가 군에 필요한 분야임을 알리기 위해 한국군사과학기술학회 발표와 육군 군수지에 기고를 하기도 했다. 군사과학기술을 대중들에게 쉽게 인지될 수 있도록 “Military Talk_재미있는 군사이야기”의 제목으로 일반도서를 출판하는 등 국방 R&D에 열정을 다하고 있다.
장영균 소령과 박규순 대위는 "함께 열정적으로 연구한 연구팀들과 연구에 전념할 수 있는 환경을 만들어준 학교와 지도교수님께 감사드린다"라며 “4차 산업혁명 시대를 맞아 대한민국의 안보를 위해 앞으로 더욱 성실히 연구에 임할 것이다.”라고 수상 소감을 밝혔다.
2020.11.16 조회수 34986
교내 군 위탁교육장교, 국방대 국방학술대회 금상 수상 쾌거
우리 대학 문술미래전략대학원 박사과정 육군소령 장영균(지도교수 : 양재석)과 신소재공학과 석사과정 육군대위 박규순(지도교수 : 스티브박)이 국방대학교 대학원생 국방학술대회에서 금상을 수상하는 쾌거를 달성했다.
매년 국방대학교에서 열리는 국방학술대회는 안보정책, 군사전략, 국방관리, 국방과학 4개 분과에서 국방분야 우수 연구를 수상하는 대회다. 대회에서는 국방대학교, KAIST, 서울대 등 전국 각지에서 국방관련 연구를 하는 군 위탁장교와 민간학생들이 참가했다. 그 중에서 우리학교 학생은 안보정책 분과와 국방과학 분과에 참가하여 각 분과에서 1등을 해 금상(각 군 참모총장상)을 수상했다. 이를 통해 KAIST 학생들이 국가, 국방 R&D 분야에서 뛰어난 역량을 갖췄다는 사실을 알 수 있다.
현재 국군간호사관학교 교양학처 군사학교수로 재직중인 문술미래전략대학원 장영균 소령은 “Network Analysis of the US-China Hegemonic Transition”(미국과 중국의 패권전이에 대한 네트워크 분석) 이라는 연구논문을 발표했다. 이 연구는 현재 국제관계의 핵심 이슈인 미국과 중국의 패권경쟁을 네트워크 분석을 적용해 분석 및 평가한 연구로서, 심사위원들로부터 데이터에 기반한 과학적 접근을 통해 미국과 중국의 패권전이 현상을 객관적으로 분석했다는 평을 받았다. 장영균 소령은 "질적연구가 주를 이루고 있는 국제관계 분야에서 복잡계 네트워크라는 과학적 기법을 적용해 국제사회의 구조변화를 객관적으로 분석하고, 이를 기초로 국가의 미래 안보전략 수립에 기여하고 싶다"고 말했다. 장영균 소령의 수상을 통해 우리 대학이 이·공계 분야뿐만 아니라 사회과학 분야, 특히 국방 사회과학 분야에도 높은 수준을 갖추고 있음을 알 수 있다.
신소재공학과 박규순 대위는 “Development of 3D printable inks to fabricate fabric-based tactile sensors for warrior platform and robot combat system(미래 보병체계 및 로봇 전투체계 적용을 위한 직물 기반 촉각센서 제작용 3D 프린팅 용액 개발)”의 연구주제로 발표했다. 이는 현재 군이 추진하고 있는 워리어 플랫폼(Warrior Platform, 미래 보병체계)과 소프트 로봇 전투체계에 적용하기 위한 촉각센서를 개발한 것이다. 워리어 플랫폼에 촉각센서를 적용해 전투원의 모든 신체활동을 인지, 국방 데이터센터와 연계해 실제 전투나 훈련 속에서 전투원이 필요로 하는 움직임을 데이터화 할 수 있다. 이를 통해 교육훈련의 변혁을 이끌어 낼 수 있는 점에서 좋은 평가를 받았다. 또한, 전장상황 속에서는 로봇체계의 파괴나 변형이 빈번하게 이루어진다. 이러한 상황 속에서 구성품의 각도와 길이를 기반으로 역계산하는 기존의 로봇 제어시스템은 필연적으로 오차가 발생하는데, 촉각센서를 통해 파괴와 변형이 이루어진 이후의 결과를 통해 정확한 자세제어가 가능하다.
발표 당시 심사위원은 촉각센서가 우리 군에 꼭 필요한 분야라며 좋은 연구를 해주어 고맙다는 의견을 말하기도 했다.
특히, 박규순 대위는 우리 대학 석사과정 1학년 재학 중으로 위 성과는 여러 박사과정, 석사졸업예정자 학생들과 경쟁해 얻은 성과다. 또, 촉각센서가 군에 필요한 분야임을 알리기 위해 한국군사과학기술학회 발표와 육군 군수지에 기고를 하기도 했다. 군사과학기술을 대중들에게 쉽게 인지될 수 있도록 “Military Talk_재미있는 군사이야기”의 제목으로 일반도서를 출판하는 등 국방 R&D에 열정을 다하고 있다.
장영균 소령과 박규순 대위는 "함께 열정적으로 연구한 연구팀들과 연구에 전념할 수 있는 환경을 만들어준 학교와 지도교수님께 감사드린다"라며 “4차 산업혁명 시대를 맞아 대한민국의 안보를 위해 앞으로 더욱 성실히 연구에 임할 것이다.”라고 수상 소감을 밝혔다.
2020.11.16 조회수 34986