%EC%9E%90%EB%8F%99%ED%99%94
-
 건설재료의 성능 평가를 위한 실험 자동화 시스템 개발
빅데이터와 인공지능 기반의 건설재료 품질관리 혁신 기술 제시
우리 대학 건설및환경공학과 김재홍 교수 연구팀은 시멘트 분산제의 성능을 정밀하게 평가할 수 있는 자동화 실험 시스템을 개발했다. 이 시스템은 기존 수작업 실험의 한계를 극복하고, 데이터 사이언스와 머신러닝 기법을 활용해 시멘트 기반 재료의 품질 관리를 혁신적으로 개선할 수 있는 길을 열었다.
건설재료 품질관리의 도전과제
콘크리트는 전 세계에서 가장 많이 생산되는 공학 재료지만, 시멘트와 골재 같은 원재료가 지역마다 성질이 달라 품질과 성능의 변동성이 크다. 따라서 콘크리트 재료의 성능 시험에는 많은 수의 샘플이 필요하며, 이는 노동 집약적인 작업으로 이어진다.
김재홍 교수는 "건설재료는 다른 공학 재료에 비해 변동성이 매우 크기 때문에, 재료의 성능평가 신뢰성을 높이려면 충분한 양의 데이터가 필요합니다. 이를 위해서는 많은 수의 샘플을 제조하고 테스트해야 하는데, 기존의 수작업 방식으로는 단순히 품질 검증을 위한 작은 수의 샘플을 사용하여 현장에서 불량 레미콘 등의 문제가 종종 발생하고 있습니다"라고 설명했다.
혁신적인 자동화 실험 시스템
연구팀이 개발한 자동화 실험 시스템은 230mL 모르타르 샘플의 레올로지 특성을 정밀하게 측정할 수 있다. 이 시스템은 시료 준비, 재료 혼합, 레올로지 측정 등의 과정을 모두 자동화하여 인력 투입 없이도 정확하고 일관된 데이터를 생산할 수 있다.
연구팀은 이 시스템을 사용해 130개의 모르타르 샘플을 분석하여 시멘트 분산제의 효과를 포괄적으로 특성화했다. 주성분 분석(PCA)을 통해 토크 측정값의 뚜렷한 패턴을 발견했으며, 이를 통해 패턴의 분산을 설명하고 분산제 성능 차이를 효과적으로 포착할 수 있었다.
특히 이 자동화 시스템은 7%의 변동 계수로 우수한 재현성을 달성했으며, 이는 재료의 고유한 변동성으로 간주될 수 있다. 또한 관찰 기반 학습을 통해 시스템의 유용성을 확장하여 유동성과 블리딩 속도를 성공적으로 예측할 수 있었다. 이 내용은 건설공학 분야에서 권위 있는 학술지인 Cement and Concrete Research에 "Automated experimentation for evaluating cement dispersant performance"라는 제목으로 게재되었다.
(https://doi.org/10.1016/j.cemconres.2025.107895)
연구 결과 및 향후 계획
연구 결과는 3세대 시멘트 분산제의 우수한 성능을 확인하는 동시에, 분산제 사용량-레올로지 관계에 대한 통합적인 분석을 제시하였다. 이러한 자동화 실험 방식은 시멘트 기반 재료의 더 효율적이고 포괄적인 평가를 위한 프레임워크를 확립했다는 데 의의가 있다. 김재홍 교수는 "이번 연구에서 개발한 자동화 실험 시스템은 단순히 실험 과정을 자동화하는 것을 넘어, 데이터 사이언스와 머신러닝을 통합하여 건설재료의 품질관리 패러다임을 변화시킬 수 있는 잠재력을 가지고 있습니다"라고 강조했다.
한편, 연구팀은 건설재료의 성능 평가를 위한 자동화 실험 시스템 개발에 앞서, 건설재료의 특성에 적합한 머신러닝 알고리즘을 개발하였다. KAIST 건설및환경공학과/데이터사이언스대학원 강인국 박사과정이 제1저자로 참여한 관찰 기반 학습(observation-based learning), 도메인 적응(domain adaptation) 학습 알고리즘 등에 관한 연구는, 건설공학 분야에서 권위 있는 학술지인 Cement & Concrete Composites 등에 게재되었다.
(https://doi.org/10.1016/j.cemconcomp.2025.105943, https://doi.org/10.1016/j.conbuildmat.2023.133811).
연구팀은 앞으로 이 자동화 시스템을 확장하여 시멘트 분산제 성능 평가뿐만 아니라 강도 발현, 수화열, 내구성 등 다양한 콘크리트 성능 지표에 대한 자동화 실험을 수행할 계획이다. 또한 해외건설 및 국내건설 현장의 건설재료 변동성으로 인한 시공실패를 사전에 예측하고 방지하기 위한 성능평가 실험 자동화 및 로봇 플랫폼을 확장 구축할 예정이다.
김 교수는 "궁극적으로 우리의 목표는 건설산업에서 전문 테크니션 부족 문제, 기능인력 노령화 문제, 주52시간제 시행 등에 대응하기 위한 건설재료 품질관리 및 성능평가의 완전한 자동화 시스템을 구축하는 것입니다. 이를 통해 데이터 기반의 의사결정이 가능한 스마트 건설 환경을 조성하고자 합니다"라고 밝혔다.
이 연구는 과학기술정보통신부의 재원으로 한국연구재단의 지원을 받아 수행되었다.
2025.04.14 조회수 2209
건설재료의 성능 평가를 위한 실험 자동화 시스템 개발
빅데이터와 인공지능 기반의 건설재료 품질관리 혁신 기술 제시
우리 대학 건설및환경공학과 김재홍 교수 연구팀은 시멘트 분산제의 성능을 정밀하게 평가할 수 있는 자동화 실험 시스템을 개발했다. 이 시스템은 기존 수작업 실험의 한계를 극복하고, 데이터 사이언스와 머신러닝 기법을 활용해 시멘트 기반 재료의 품질 관리를 혁신적으로 개선할 수 있는 길을 열었다.
건설재료 품질관리의 도전과제
콘크리트는 전 세계에서 가장 많이 생산되는 공학 재료지만, 시멘트와 골재 같은 원재료가 지역마다 성질이 달라 품질과 성능의 변동성이 크다. 따라서 콘크리트 재료의 성능 시험에는 많은 수의 샘플이 필요하며, 이는 노동 집약적인 작업으로 이어진다.
김재홍 교수는 "건설재료는 다른 공학 재료에 비해 변동성이 매우 크기 때문에, 재료의 성능평가 신뢰성을 높이려면 충분한 양의 데이터가 필요합니다. 이를 위해서는 많은 수의 샘플을 제조하고 테스트해야 하는데, 기존의 수작업 방식으로는 단순히 품질 검증을 위한 작은 수의 샘플을 사용하여 현장에서 불량 레미콘 등의 문제가 종종 발생하고 있습니다"라고 설명했다.
혁신적인 자동화 실험 시스템
연구팀이 개발한 자동화 실험 시스템은 230mL 모르타르 샘플의 레올로지 특성을 정밀하게 측정할 수 있다. 이 시스템은 시료 준비, 재료 혼합, 레올로지 측정 등의 과정을 모두 자동화하여 인력 투입 없이도 정확하고 일관된 데이터를 생산할 수 있다.
연구팀은 이 시스템을 사용해 130개의 모르타르 샘플을 분석하여 시멘트 분산제의 효과를 포괄적으로 특성화했다. 주성분 분석(PCA)을 통해 토크 측정값의 뚜렷한 패턴을 발견했으며, 이를 통해 패턴의 분산을 설명하고 분산제 성능 차이를 효과적으로 포착할 수 있었다.
특히 이 자동화 시스템은 7%의 변동 계수로 우수한 재현성을 달성했으며, 이는 재료의 고유한 변동성으로 간주될 수 있다. 또한 관찰 기반 학습을 통해 시스템의 유용성을 확장하여 유동성과 블리딩 속도를 성공적으로 예측할 수 있었다. 이 내용은 건설공학 분야에서 권위 있는 학술지인 Cement and Concrete Research에 "Automated experimentation for evaluating cement dispersant performance"라는 제목으로 게재되었다.
(https://doi.org/10.1016/j.cemconres.2025.107895)
연구 결과 및 향후 계획
연구 결과는 3세대 시멘트 분산제의 우수한 성능을 확인하는 동시에, 분산제 사용량-레올로지 관계에 대한 통합적인 분석을 제시하였다. 이러한 자동화 실험 방식은 시멘트 기반 재료의 더 효율적이고 포괄적인 평가를 위한 프레임워크를 확립했다는 데 의의가 있다. 김재홍 교수는 "이번 연구에서 개발한 자동화 실험 시스템은 단순히 실험 과정을 자동화하는 것을 넘어, 데이터 사이언스와 머신러닝을 통합하여 건설재료의 품질관리 패러다임을 변화시킬 수 있는 잠재력을 가지고 있습니다"라고 강조했다.
한편, 연구팀은 건설재료의 성능 평가를 위한 자동화 실험 시스템 개발에 앞서, 건설재료의 특성에 적합한 머신러닝 알고리즘을 개발하였다. KAIST 건설및환경공학과/데이터사이언스대학원 강인국 박사과정이 제1저자로 참여한 관찰 기반 학습(observation-based learning), 도메인 적응(domain adaptation) 학습 알고리즘 등에 관한 연구는, 건설공학 분야에서 권위 있는 학술지인 Cement & Concrete Composites 등에 게재되었다.
(https://doi.org/10.1016/j.cemconcomp.2025.105943, https://doi.org/10.1016/j.conbuildmat.2023.133811).
연구팀은 앞으로 이 자동화 시스템을 확장하여 시멘트 분산제 성능 평가뿐만 아니라 강도 발현, 수화열, 내구성 등 다양한 콘크리트 성능 지표에 대한 자동화 실험을 수행할 계획이다. 또한 해외건설 및 국내건설 현장의 건설재료 변동성으로 인한 시공실패를 사전에 예측하고 방지하기 위한 성능평가 실험 자동화 및 로봇 플랫폼을 확장 구축할 예정이다.
김 교수는 "궁극적으로 우리의 목표는 건설산업에서 전문 테크니션 부족 문제, 기능인력 노령화 문제, 주52시간제 시행 등에 대응하기 위한 건설재료 품질관리 및 성능평가의 완전한 자동화 시스템을 구축하는 것입니다. 이를 통해 데이터 기반의 의사결정이 가능한 스마트 건설 환경을 조성하고자 합니다"라고 밝혔다.
이 연구는 과학기술정보통신부의 재원으로 한국연구재단의 지원을 받아 수행되었다.
2025.04.14 조회수 2209 -
 유지환 교수, IEEE 로봇·자동화 분과 아시아대표로 선임
우리 대학 건설및환경공학과 유지환 교수가 세계적인 학회인 IEEE* 로봇 및 자동화 분과(Robotics and Automation Society, RAS)에서 아시아 지역 대표로 의사결정위원회(Administrative Committee, AdCom) 위원으로 선임되었음을 3일 밝혔다.
*IEEE: 미국전기전자학회(Institute of Electrical and Electronics Engineers): 전기전자공학, 컴퓨터, 로봇공학, 통신 등 다양한 공학 분야에서 세계 최대 규모의 학회
유 교수는 이번에 아시아를 대표하는 멤버로 선임돼 2025년 1월부터 3년간 활동하게 된다. 특히, 이번 선임은 우리나라가 일본과 중국이 독점해 온 아시아 지역 대표 자리를 가져왔다는 점에서 매우 의미 있는 성과로 평가된다.
IEEE RAS 의사결정위원회는 로봇 및 자동화 분야에서 학회의 정책 결정과 전략적 방향성을 이끄는 핵심 조직으로, 매년 전 세계에서 단 6명만이 새롭게 선출되며, 전체 위원은 18인으로 구성되어 있다.
또한 유 교수는 세계적인 학회인 IEEE 석학회원(Fellow)*으로 선정되었고 2025년 1월부터는 IEEE 햅틱스 저널(Transactions on Haptics) 편집장(Editor-in-Chief, EiC)으로도 활동할 예정이다.
*IEEE 석학회원(Fellow): IEEE 회원 중 연구 성과와 공헌이 탁월한 소수의 연구자에게 수여되는 명예로운 지위로, 전 세계 회원의 최상위 0.1% 이내에 해당하는 연구자 중에서만 선정되는 IEEE의 최고 등급 회원 자격임
유지환 교수는 햅틱스 및 원격제어 분야의 세계적인 석학으로, 안정성과 시간지연 문제를 해결하며 다수의 국제 저널 논문과 특허를 통해 해당 분야에 기여해 왔다. 유 교수는 2018년부터 국제학회 ‘아시아햅틱스(AsiaHaptics)’ 총괄 의장(General Chair) 및 ‘세계 햅틱스 학회(World Haptics Conference)’ 편집장(Editor-in-Chief)을 역임한 바 있다.
유 교수는 “이번 선정을 통해 한국 및 아시아 로봇 소사이어티의 이익을 세계적으로 대변하고, 대한민국 로봇 및 자동화 기술의 위상을 국제적으로 알리며, 학문적 교류와 기술 발전에 기여하겠다”라는 포부를 밝혔다.
또한 “IEEE 석학회원으로 선정되어 큰 영광이며, 앞으로도 학문적 연구와 기술 혁신을 통해 대한민국과 세계 로봇공학 및 자동화 분야 발전에 기여하겠다”는 소감을 전했다.
한편, 유지환 교수는 KAIST에서 기계공학 석박사 학위를 취득했으며, 미국 워싱턴대학교 및 독일 항공우주연구원에서 박사후연구원을 거쳐 2019년부터 KAIST 건설및환경공학과 교수로 재직 중이다. 현재 KAIST 로봇학제전공 주임교수도 겸임하고 있다.
2025.01.03 조회수 2828
유지환 교수, IEEE 로봇·자동화 분과 아시아대표로 선임
우리 대학 건설및환경공학과 유지환 교수가 세계적인 학회인 IEEE* 로봇 및 자동화 분과(Robotics and Automation Society, RAS)에서 아시아 지역 대표로 의사결정위원회(Administrative Committee, AdCom) 위원으로 선임되었음을 3일 밝혔다.
*IEEE: 미국전기전자학회(Institute of Electrical and Electronics Engineers): 전기전자공학, 컴퓨터, 로봇공학, 통신 등 다양한 공학 분야에서 세계 최대 규모의 학회
유 교수는 이번에 아시아를 대표하는 멤버로 선임돼 2025년 1월부터 3년간 활동하게 된다. 특히, 이번 선임은 우리나라가 일본과 중국이 독점해 온 아시아 지역 대표 자리를 가져왔다는 점에서 매우 의미 있는 성과로 평가된다.
IEEE RAS 의사결정위원회는 로봇 및 자동화 분야에서 학회의 정책 결정과 전략적 방향성을 이끄는 핵심 조직으로, 매년 전 세계에서 단 6명만이 새롭게 선출되며, 전체 위원은 18인으로 구성되어 있다.
또한 유 교수는 세계적인 학회인 IEEE 석학회원(Fellow)*으로 선정되었고 2025년 1월부터는 IEEE 햅틱스 저널(Transactions on Haptics) 편집장(Editor-in-Chief, EiC)으로도 활동할 예정이다.
*IEEE 석학회원(Fellow): IEEE 회원 중 연구 성과와 공헌이 탁월한 소수의 연구자에게 수여되는 명예로운 지위로, 전 세계 회원의 최상위 0.1% 이내에 해당하는 연구자 중에서만 선정되는 IEEE의 최고 등급 회원 자격임
유지환 교수는 햅틱스 및 원격제어 분야의 세계적인 석학으로, 안정성과 시간지연 문제를 해결하며 다수의 국제 저널 논문과 특허를 통해 해당 분야에 기여해 왔다. 유 교수는 2018년부터 국제학회 ‘아시아햅틱스(AsiaHaptics)’ 총괄 의장(General Chair) 및 ‘세계 햅틱스 학회(World Haptics Conference)’ 편집장(Editor-in-Chief)을 역임한 바 있다.
유 교수는 “이번 선정을 통해 한국 및 아시아 로봇 소사이어티의 이익을 세계적으로 대변하고, 대한민국 로봇 및 자동화 기술의 위상을 국제적으로 알리며, 학문적 교류와 기술 발전에 기여하겠다”라는 포부를 밝혔다.
또한 “IEEE 석학회원으로 선정되어 큰 영광이며, 앞으로도 학문적 연구와 기술 혁신을 통해 대한민국과 세계 로봇공학 및 자동화 분야 발전에 기여하겠다”는 소감을 전했다.
한편, 유지환 교수는 KAIST에서 기계공학 석박사 학위를 취득했으며, 미국 워싱턴대학교 및 독일 항공우주연구원에서 박사후연구원을 거쳐 2019년부터 KAIST 건설및환경공학과 교수로 재직 중이다. 현재 KAIST 로봇학제전공 주임교수도 겸임하고 있다.
2025.01.03 조회수 2828 -
 김이섭 교수 연구실 박준영 석사졸업생, 국제 반도체 설계 자동화 학회 최우수논문상 수상
우리 대학 전기및전자공학부 김이섭 교수 연구실의 박준영 석사졸업생이 6월 23일 ~ 6월 27일, 미국 샌프란시스코에서 개최된 국제 반도체 설계 자동화 학회 (Design Automation Conference, 이하 DAC) 에서 최우수 논문상(Best Paper Award)을 수상하는 성과를 거두었다. DAC은 1964년에 설립돼 올해 61회째를 맞은, 반도체설계자동화, 인공지능 알고리즘과 칩 설계 등을 포함하는 국제학술대회로서, 제출된 논문 중 상위 20퍼센트 정도만 선정하는, 관련 분야 최고 권위의 학회이다.
수상한 연구는 우리 대학 전기및전자공학부 졸업생 박준영 씨의 석사과정 졸업 논문에 기반한 것으로서, Large Language Model 모델 추론의 문제점이 되는 KV 캐싱의 메모리 전송을 줄이는 알고리즘 근사 기법과 하드웨어 아키텍처를 제안하였으며, 학회 best paper award 선정 위원회로부터 그 우수성을 인정받아 발표논문 337편 중 (제출논문 1,545편) 선정된 4편의 후보 논문중에서 최종 best paper award 수상논문으로 선정되었다.
자세한 내용은 다음과 같다.
– 학 회 명 : 2024 61st IEEE/ACM Design Automation Conference (DAC)
– 개최기간 : 2024년 6월 23일 ~ 27일
– 수 상 명 : Best Paper Award
– 저 자 : 박준영, 강명구, 한윤기, 김양곤, 신재강, 김이섭(지도교수)
– 논 문 명 : Token-Picker : Accelerating Attention in Text Generation with Minimized Memory Transfer via Probability Estimation
2024.07.02 조회수 5598
김이섭 교수 연구실 박준영 석사졸업생, 국제 반도체 설계 자동화 학회 최우수논문상 수상
우리 대학 전기및전자공학부 김이섭 교수 연구실의 박준영 석사졸업생이 6월 23일 ~ 6월 27일, 미국 샌프란시스코에서 개최된 국제 반도체 설계 자동화 학회 (Design Automation Conference, 이하 DAC) 에서 최우수 논문상(Best Paper Award)을 수상하는 성과를 거두었다. DAC은 1964년에 설립돼 올해 61회째를 맞은, 반도체설계자동화, 인공지능 알고리즘과 칩 설계 등을 포함하는 국제학술대회로서, 제출된 논문 중 상위 20퍼센트 정도만 선정하는, 관련 분야 최고 권위의 학회이다.
수상한 연구는 우리 대학 전기및전자공학부 졸업생 박준영 씨의 석사과정 졸업 논문에 기반한 것으로서, Large Language Model 모델 추론의 문제점이 되는 KV 캐싱의 메모리 전송을 줄이는 알고리즘 근사 기법과 하드웨어 아키텍처를 제안하였으며, 학회 best paper award 선정 위원회로부터 그 우수성을 인정받아 발표논문 337편 중 (제출논문 1,545편) 선정된 4편의 후보 논문중에서 최종 best paper award 수상논문으로 선정되었다.
자세한 내용은 다음과 같다.
– 학 회 명 : 2024 61st IEEE/ACM Design Automation Conference (DAC)
– 개최기간 : 2024년 6월 23일 ~ 27일
– 수 상 명 : Best Paper Award
– 저 자 : 박준영, 강명구, 한윤기, 김양곤, 신재강, 김이섭(지도교수)
– 논 문 명 : Token-Picker : Accelerating Attention in Text Generation with Minimized Memory Transfer via Probability Estimation
2024.07.02 조회수 5598 -
 2.4배 가격 효율적인 챗GPT 핵심 AI반도체 개발
오픈AI가 출시한 챗GPT는 전 세계적으로 화두이며 이 기술이 가져올 변화에 모두 주목하고 있다. 이 기술은 거대 언어 모델을 기반으로 하고 있다. 거대 언어 모델은 기존 인공지능과는 달리 전례 없는 큰 규모의 인공지능 모델이다. 이를 운영하기 위해서는 수많은 고성능 GPU가 필요해, 천문학적인 컴퓨팅 비용이 든다는 문제점이 있다.
우리 대학 전기및전자공학부 김주영 교수 연구팀이 챗GPT에 핵심으로 사용되는 거대 언어 모델의 추론 연산을 효율적으로 가속하는 AI 반도체를 개발했다고 4일 밝혔다.
연구팀이 개발한 AI 반도체 ‘LPU(Latency Processing Unit)’는 거대 언어 모델의 추론 연산을 효율적으로 가속한다. 메모리 대역폭 사용을 극대화하고 추론에 필요한 모든 연산을 고속으로 수행 가능한 연산 엔진을 갖춘 AI 반도체이며, 자체 네트워킹을 내장하여 다수개 가속기로 확장이 용이하다. 이 LPU 기반의 가속 어플라이언스 서버는 업계 최고의 고성능 GPU인 엔비디아 A100 기반 슈퍼컴퓨터보다 성능은 최대 50%, 가격 대비 성능은 2.4배가량 높였다. 이는 최근 급격하게 생성형 AI 서비스 수요가 증가하고 있는 데이터센터의에서 고성능 GPU를 대체할 수 있을 것으로 기대한다.
이번 연구는 김주영 교수의 창업기업인 ㈜하이퍼엑셀에서 수행했으며 미국시간 7월 12일 샌프란시스코에서 진행된 국제 반도체 설계 자동화 학회(Design Automation Conference, 이하 DAC)에서 공학 부문 최고 발표상(Engineering Best Presentation Award)을 수상하는 쾌거를 이뤘다.
DAC은 국제 반도체 설계 분야의 대표 학회이며, 특히 전자 설계 자동화(Electronic Design Automation, EDA)와 반도체 설계자산(Semiconductor Intellectual Property, IP) 기술 관련하여 세계적인 반도체 설계 기술을 선보이는 학회다. DAC에는 인텔, 엔비디아, AMD, 구글, 마이크로소프트, 삼성, TSMC 등 세계적인 반도체 설계 기업이 참가하며, 하버드대학교, MIT, 스탠퍼드대학교 등 세계 최고의 대학도 많이 참가한다.
세계적인 반도체 기술들 사이에서 김 교수팀이 거대 언어 모델을 위한 AI 반도체 기술로 유일하게 수상한 것은 매우 의미가 크다. 이번 수상으로 거대 언어 모델의 추론에 필요한 막대한 비용을 획기적으로 절감할 수 있는 AI 반도체 솔루션으로 세계 무대에서 인정받은 것이다.
우리 대학 김주영 교수는 “미래 거대 인공지능 연산을 위한 새로운 프로세서 ‘LPU’로 글로벌 시장을 개척하고, 빅테크 기업들의 기술력보다 우위를 선점하겠다”라며 큰 포부를 밝혔다.
2023.08.04 조회수 9284
2.4배 가격 효율적인 챗GPT 핵심 AI반도체 개발
오픈AI가 출시한 챗GPT는 전 세계적으로 화두이며 이 기술이 가져올 변화에 모두 주목하고 있다. 이 기술은 거대 언어 모델을 기반으로 하고 있다. 거대 언어 모델은 기존 인공지능과는 달리 전례 없는 큰 규모의 인공지능 모델이다. 이를 운영하기 위해서는 수많은 고성능 GPU가 필요해, 천문학적인 컴퓨팅 비용이 든다는 문제점이 있다.
우리 대학 전기및전자공학부 김주영 교수 연구팀이 챗GPT에 핵심으로 사용되는 거대 언어 모델의 추론 연산을 효율적으로 가속하는 AI 반도체를 개발했다고 4일 밝혔다.
연구팀이 개발한 AI 반도체 ‘LPU(Latency Processing Unit)’는 거대 언어 모델의 추론 연산을 효율적으로 가속한다. 메모리 대역폭 사용을 극대화하고 추론에 필요한 모든 연산을 고속으로 수행 가능한 연산 엔진을 갖춘 AI 반도체이며, 자체 네트워킹을 내장하여 다수개 가속기로 확장이 용이하다. 이 LPU 기반의 가속 어플라이언스 서버는 업계 최고의 고성능 GPU인 엔비디아 A100 기반 슈퍼컴퓨터보다 성능은 최대 50%, 가격 대비 성능은 2.4배가량 높였다. 이는 최근 급격하게 생성형 AI 서비스 수요가 증가하고 있는 데이터센터의에서 고성능 GPU를 대체할 수 있을 것으로 기대한다.
이번 연구는 김주영 교수의 창업기업인 ㈜하이퍼엑셀에서 수행했으며 미국시간 7월 12일 샌프란시스코에서 진행된 국제 반도체 설계 자동화 학회(Design Automation Conference, 이하 DAC)에서 공학 부문 최고 발표상(Engineering Best Presentation Award)을 수상하는 쾌거를 이뤘다.
DAC은 국제 반도체 설계 분야의 대표 학회이며, 특히 전자 설계 자동화(Electronic Design Automation, EDA)와 반도체 설계자산(Semiconductor Intellectual Property, IP) 기술 관련하여 세계적인 반도체 설계 기술을 선보이는 학회다. DAC에는 인텔, 엔비디아, AMD, 구글, 마이크로소프트, 삼성, TSMC 등 세계적인 반도체 설계 기업이 참가하며, 하버드대학교, MIT, 스탠퍼드대학교 등 세계 최고의 대학도 많이 참가한다.
세계적인 반도체 기술들 사이에서 김 교수팀이 거대 언어 모델을 위한 AI 반도체 기술로 유일하게 수상한 것은 매우 의미가 크다. 이번 수상으로 거대 언어 모델의 추론에 필요한 막대한 비용을 획기적으로 절감할 수 있는 AI 반도체 솔루션으로 세계 무대에서 인정받은 것이다.
우리 대학 김주영 교수는 “미래 거대 인공지능 연산을 위한 새로운 프로세서 ‘LPU’로 글로벌 시장을 개척하고, 빅테크 기업들의 기술력보다 우위를 선점하겠다”라며 큰 포부를 밝혔다.
2023.08.04 조회수 9284 -
 명현 교수팀, 국제 로봇-자동화 학술대회 슬램(SLAM) 챌린지 2관왕, 저널 최우수논문상 수상
우리 대학 전기및전자공학부 명현 교수 연구실(Urban Robotics lab)의 "Urban Robotics Lab @ KAIST”와, "URL @ KAIST” 두 팀이 5월 29일부터 6월 2일 동안 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회(참가자 7천여 명)인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 내에서 개최된 힐티 슬램 챌린지(HILTI SLAM Challenge)에서 각각 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다고 9일 밝혔다.
※ 팀 구성
- Urban Robotics Lab @ KAIST (라이다 부문): 임형태 박사, 김대범, 신건희 석사과정, 이대한 인턴, 명현 교수 (KAIST), URL @ KAIST (비전 부문): 임현준 박사과정, 명현 교수 (KAIST)
힐티 슬램 챌린지 2023은 로봇 분야에서 가장 저명한 IEEE ICRA 학회의 미래 건설 워크샵 (Future of Construction Workshop) 프로그램의 일부로, 리히텐슈타인 공국의 힐티(HILTI) 사와 영국 옥스퍼드 대학의 옥스퍼드 로봇 연구소(Oxford Robotics Institute), 스위스 취리히 공대의 로봇 인지 그룹(Robotics and Perception Group)이 함께 주최했다. 본 대회는 공사환경이나 특징점이 부족한 좁은 실내 환경, 어두운 환경 등 기존 위치 측정 및 동시 지도화(Simultaneous Localization And Mapping, 이하 SLAM) 알고리즘이 동작하기 어려운 환경에서도 강인하게 동작할 수 있는 SLAM 알고리즘을 개발해 정확한 매핑을 하는 대회다. 본 대회에 총 80여 팀의 해외 유수 기업과 연구팀들이 참가했다. 특히, 이번 대회는 2021년도부터 꾸준히 개최되어, 현재는 ICRA 내의 대회 중에서도 저명한 대회 중 하나로 손꼽힌다.
연구팀은 자체 개발한 주변 환경의 특징에 따른 적응형 라이다-관성 주행계(AdaLIO: Adaptive LiDAR-Inertial Odometry) 알고리즘과 다양한 최적화 프레임워크(Pose Graph Optimization)를 활용해 라이다(LiDAR) 세션에서 총 63팀 중 전체 1위를 하였고, 비전 부문에서는 자체 개발한 직선 특징 기반의 강인한 비전-관성 주행계 알고리즘(UV-SLAM)을 활용해 학계 1위 (전체 2위)를 수상했다. 또한 부상으로 상금 3,000 CHF(스위스 프랑)와 1,000 CHF를 각각 받을 예정이다. 연구팀은 2022년에 처음 출전해 학계 2위 (전체 4위)를 수상한 바 있다.
참고로 SLAM 기술은 자율주행(자율차/자율로봇), 자율보행, 자율비행, 자율운항 등의 핵심이 되는 위치인식 및 맵 작성을 동시에 하는 기술이다.
한편, 명현 교수 연구팀의 오민호 박사과정, 정의곤 석사(현 네이버랩스 소속), 임형태 박사, 송원호 박사과정, 허수민 석사(현 스트라드비전 소속), 이응창 박사과정이 LIG넥스원과의 산학협업을 통해 작성한 논문이 동일 학술대회인 2023 IEEE ICRA 기간 중 6월 1일 열린 시상식에서 2022년 IEEE 국제 로봇/자동화 저널(RA-L, Robotics and Automation Letter) 최우수 논문상(Best paper award)을 수상했다.
※ 저자 구성
오민호 박사과정, 정의곤 석사, 임형태 박사, 송원호 박사과정, 허수민 석사, 이응창 박사과정 (이상 KAIST), 박정희 선임연구원, 김재경 단장, 이장우 선임연구원 (이상 LIG넥스원), 명현 교수 (KAIST)
연구팀의 논문은 세계적 권위 저널인 RA-L에 2022년 한해 동안 출간된 1,100여 편의 논문 중 편집위원회의 심사를 거쳐 5편의 최우수 논문 중 한편으로 선정됐고, 상패와 함께 상금을 수여받을 예정이다. (논문 제목: “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans”)
본 논문에서 명현 교수 연구팀은 미지의 탐사 환경에서도 지상 로봇이 안전하게 작동하며 임무를 수행할 수 있는 자율주행 시스템을 제안했다. 특히, 지상 로봇이 도심 환경 및 숲과 같은 험난한 비정형 환경과 같은 다양한 환경에서도 그래프 구조 기반의 이동 가능 영역 탐지 및 주변 환경의 객체 인식을 통해 실시간으로 자율주행이 가능하도록 솔루션을 제안했다.
또한, 연구팀은 실제 자율주행 시스템에 적용하여 실용성을 입증한 바 있으며, 해당 기술을 공개함으로써 로봇 자율 주행 기술 발전에 이바지했다. (공개 링크: https://github.com/url-kaist/TRAVEL)
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.
2023.06.09 조회수 9530
명현 교수팀, 국제 로봇-자동화 학술대회 슬램(SLAM) 챌린지 2관왕, 저널 최우수논문상 수상
우리 대학 전기및전자공학부 명현 교수 연구실(Urban Robotics lab)의 "Urban Robotics Lab @ KAIST”와, "URL @ KAIST” 두 팀이 5월 29일부터 6월 2일 동안 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회(참가자 7천여 명)인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 내에서 개최된 힐티 슬램 챌린지(HILTI SLAM Challenge)에서 각각 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다고 9일 밝혔다.
※ 팀 구성
- Urban Robotics Lab @ KAIST (라이다 부문): 임형태 박사, 김대범, 신건희 석사과정, 이대한 인턴, 명현 교수 (KAIST), URL @ KAIST (비전 부문): 임현준 박사과정, 명현 교수 (KAIST)
힐티 슬램 챌린지 2023은 로봇 분야에서 가장 저명한 IEEE ICRA 학회의 미래 건설 워크샵 (Future of Construction Workshop) 프로그램의 일부로, 리히텐슈타인 공국의 힐티(HILTI) 사와 영국 옥스퍼드 대학의 옥스퍼드 로봇 연구소(Oxford Robotics Institute), 스위스 취리히 공대의 로봇 인지 그룹(Robotics and Perception Group)이 함께 주최했다. 본 대회는 공사환경이나 특징점이 부족한 좁은 실내 환경, 어두운 환경 등 기존 위치 측정 및 동시 지도화(Simultaneous Localization And Mapping, 이하 SLAM) 알고리즘이 동작하기 어려운 환경에서도 강인하게 동작할 수 있는 SLAM 알고리즘을 개발해 정확한 매핑을 하는 대회다. 본 대회에 총 80여 팀의 해외 유수 기업과 연구팀들이 참가했다. 특히, 이번 대회는 2021년도부터 꾸준히 개최되어, 현재는 ICRA 내의 대회 중에서도 저명한 대회 중 하나로 손꼽힌다.
연구팀은 자체 개발한 주변 환경의 특징에 따른 적응형 라이다-관성 주행계(AdaLIO: Adaptive LiDAR-Inertial Odometry) 알고리즘과 다양한 최적화 프레임워크(Pose Graph Optimization)를 활용해 라이다(LiDAR) 세션에서 총 63팀 중 전체 1위를 하였고, 비전 부문에서는 자체 개발한 직선 특징 기반의 강인한 비전-관성 주행계 알고리즘(UV-SLAM)을 활용해 학계 1위 (전체 2위)를 수상했다. 또한 부상으로 상금 3,000 CHF(스위스 프랑)와 1,000 CHF를 각각 받을 예정이다. 연구팀은 2022년에 처음 출전해 학계 2위 (전체 4위)를 수상한 바 있다.
참고로 SLAM 기술은 자율주행(자율차/자율로봇), 자율보행, 자율비행, 자율운항 등의 핵심이 되는 위치인식 및 맵 작성을 동시에 하는 기술이다.
한편, 명현 교수 연구팀의 오민호 박사과정, 정의곤 석사(현 네이버랩스 소속), 임형태 박사, 송원호 박사과정, 허수민 석사(현 스트라드비전 소속), 이응창 박사과정이 LIG넥스원과의 산학협업을 통해 작성한 논문이 동일 학술대회인 2023 IEEE ICRA 기간 중 6월 1일 열린 시상식에서 2022년 IEEE 국제 로봇/자동화 저널(RA-L, Robotics and Automation Letter) 최우수 논문상(Best paper award)을 수상했다.
※ 저자 구성
오민호 박사과정, 정의곤 석사, 임형태 박사, 송원호 박사과정, 허수민 석사, 이응창 박사과정 (이상 KAIST), 박정희 선임연구원, 김재경 단장, 이장우 선임연구원 (이상 LIG넥스원), 명현 교수 (KAIST)
연구팀의 논문은 세계적 권위 저널인 RA-L에 2022년 한해 동안 출간된 1,100여 편의 논문 중 편집위원회의 심사를 거쳐 5편의 최우수 논문 중 한편으로 선정됐고, 상패와 함께 상금을 수여받을 예정이다. (논문 제목: “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans”)
본 논문에서 명현 교수 연구팀은 미지의 탐사 환경에서도 지상 로봇이 안전하게 작동하며 임무를 수행할 수 있는 자율주행 시스템을 제안했다. 특히, 지상 로봇이 도심 환경 및 숲과 같은 험난한 비정형 환경과 같은 다양한 환경에서도 그래프 구조 기반의 이동 가능 영역 탐지 및 주변 환경의 객체 인식을 통해 실시간으로 자율주행이 가능하도록 솔루션을 제안했다.
또한, 연구팀은 실제 자율주행 시스템에 적용하여 실용성을 입증한 바 있으며, 해당 기술을 공개함으로써 로봇 자율 주행 기술 발전에 이바지했다. (공개 링크: https://github.com/url-kaist/TRAVEL)
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.
2023.06.09 조회수 9530 -
 유지환 교수, IEEE 로보틱스 및 자동화 학술회 특훈강연교수 프로그램 위원장 선임
우리 대학 건설및환경공학과 유지환 교수가 로봇분야 세계 최고권위의 국제전기전자공학회(IEEE) 로보틱스 및 자동화 학술회(Robotics and Automation Society)에서 운영하는 특훈강연교수(Distinguished Lecturers) 프로그램 전체총괄을 담당하는 위원장(chair)에 선임됐다.
국제전기전자공학회 로보틱스 및 자동화 학술회의 특훈강연교수 프로그램은 로봇분야 우수강의 및 교육콘텐츠를 접할 기회가 없는 개발도상국가 학생들을 대상으로 로봇분야 강의 및 특강 서비스를 제공할 목적으로 국제전기전자공학회 로보틱스 및 자동화 학술회 산하의 기술분과(Technical Committees) 중심으로 운영되는 프로그램으로서, 전체 21개의 기술분과에서 약 63명의 세계적으로 저명한 석학들로 구성 된 특훈강연교수들이 활동하고 있다. 이번에 특훈강연교수 프로그램의 위원장을 맡게 된 유지환 교수는 신규 특훈강연교수의 발굴 및 승인에서부터 전체 프로그램의 운영에 이르기까지의 역할을 담당하게 된다.
2022.03.24 조회수 7537
유지환 교수, IEEE 로보틱스 및 자동화 학술회 특훈강연교수 프로그램 위원장 선임
우리 대학 건설및환경공학과 유지환 교수가 로봇분야 세계 최고권위의 국제전기전자공학회(IEEE) 로보틱스 및 자동화 학술회(Robotics and Automation Society)에서 운영하는 특훈강연교수(Distinguished Lecturers) 프로그램 전체총괄을 담당하는 위원장(chair)에 선임됐다.
국제전기전자공학회 로보틱스 및 자동화 학술회의 특훈강연교수 프로그램은 로봇분야 우수강의 및 교육콘텐츠를 접할 기회가 없는 개발도상국가 학생들을 대상으로 로봇분야 강의 및 특강 서비스를 제공할 목적으로 국제전기전자공학회 로보틱스 및 자동화 학술회 산하의 기술분과(Technical Committees) 중심으로 운영되는 프로그램으로서, 전체 21개의 기술분과에서 약 63명의 세계적으로 저명한 석학들로 구성 된 특훈강연교수들이 활동하고 있다. 이번에 특훈강연교수 프로그램의 위원장을 맡게 된 유지환 교수는 신규 특훈강연교수의 발굴 및 승인에서부터 전체 프로그램의 운영에 이르기까지의 역할을 담당하게 된다.
2022.03.24 조회수 7537 -
 산업및시스템공학과 장영재 교수, 디지털혁신 SW부문 대상(과기부 장관상) 수상
우리 대학 산업및시스템공학과 장영재 교수가 CDE학회(Society for Computational Design and Engineering)에서 주관하는 2022 디지털혁신 SW 공모전에서 대상인 '과기부 장관상'을 수상하였다.
장영재 교수 연구진은 2016년부터 강화학습 기반 대규모 군집 물류 자동화 로봇을 제어하는 SW개발을 진행해왔다. 관련 기술은 2019년 KAIST 10대 기술로 선정되었으며 IEEE SMILE과 CIRP등에서 최고 논문으로 선정되기도 하였다.
KAIST의 원천 기술을 기반으로 장영재 교수 연구실 출신 박사들이 <다임리서치>란 스타트업을 2020년 설립하였으며 작년 SW 개발에 성공 글로벌 반도체, 평판디스플레이, 전기차 베터리 (2차전지)제조 공장에 SW를 공급하고 있다. KAIST 연구소 기업인 <다임리서치>는 인공지능기술과 디지털트윈 기술을 결합한 제조 SW기업으로 성장중이다.
장영재 교수는 "이번 대상수상은 KAIST 기술을 통한 사업화 및 산업계 기여에 의미를 둔다"라 언급하였다.
2022.02.17 조회수 9480
산업및시스템공학과 장영재 교수, 디지털혁신 SW부문 대상(과기부 장관상) 수상
우리 대학 산업및시스템공학과 장영재 교수가 CDE학회(Society for Computational Design and Engineering)에서 주관하는 2022 디지털혁신 SW 공모전에서 대상인 '과기부 장관상'을 수상하였다.
장영재 교수 연구진은 2016년부터 강화학습 기반 대규모 군집 물류 자동화 로봇을 제어하는 SW개발을 진행해왔다. 관련 기술은 2019년 KAIST 10대 기술로 선정되었으며 IEEE SMILE과 CIRP등에서 최고 논문으로 선정되기도 하였다.
KAIST의 원천 기술을 기반으로 장영재 교수 연구실 출신 박사들이 <다임리서치>란 스타트업을 2020년 설립하였으며 작년 SW 개발에 성공 글로벌 반도체, 평판디스플레이, 전기차 베터리 (2차전지)제조 공장에 SW를 공급하고 있다. KAIST 연구소 기업인 <다임리서치>는 인공지능기술과 디지털트윈 기술을 결합한 제조 SW기업으로 성장중이다.
장영재 교수는 "이번 대상수상은 KAIST 기술을 통한 사업화 및 산업계 기여에 의미를 둔다"라 언급하였다.
2022.02.17 조회수 9480 -
 건설및환경공학과 유지환 교수팀, IEEE 로보틱스 자동화 저널 최우수 논문상 수상
우리 대학 건설 및 환경공학과 유지환 교수 연구팀이 로봇 분야 프리미어 저널인 IEEE 로보틱스 자동화 저널(Robotics and Automation Magazine)에서 “Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration” 이라는 논문으로 2020년 최우수 논문상(Best Paper Award)에 선정됐다.
시상은 5월 30일부터 개최된 로봇 분야 프리미어 학회인 2021 IEEE 로보틱스 자동화 국제 학회 (International Conference on Robotics and Automation, ICRA) 시상식(6월 2일)에서 온라인으로 수여됐다.
선정된 논문은 스탠포드 대학교와의 공동연구 결과로 발표된 논문으로, 나무줄기처럼 자라나는 소프트 그로잉 로봇의 설계, 원격조종, 그리고 재난 및 탐사 현장에서의 활용에 관한 논문으로, 동 저널에 2020년 게재된 논문 중 가장 큰 영향력과 많은 인용 수를 인정받아 최우수 논문으로 선정됐다.
2021.06.04 조회수 61788
건설및환경공학과 유지환 교수팀, IEEE 로보틱스 자동화 저널 최우수 논문상 수상
우리 대학 건설 및 환경공학과 유지환 교수 연구팀이 로봇 분야 프리미어 저널인 IEEE 로보틱스 자동화 저널(Robotics and Automation Magazine)에서 “Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration” 이라는 논문으로 2020년 최우수 논문상(Best Paper Award)에 선정됐다.
시상은 5월 30일부터 개최된 로봇 분야 프리미어 학회인 2021 IEEE 로보틱스 자동화 국제 학회 (International Conference on Robotics and Automation, ICRA) 시상식(6월 2일)에서 온라인으로 수여됐다.
선정된 논문은 스탠포드 대학교와의 공동연구 결과로 발표된 논문으로, 나무줄기처럼 자라나는 소프트 그로잉 로봇의 설계, 원격조종, 그리고 재난 및 탐사 현장에서의 활용에 관한 논문으로, 동 저널에 2020년 게재된 논문 중 가장 큰 영향력과 많은 인용 수를 인정받아 최우수 논문으로 선정됐다.
2021.06.04 조회수 61788 -
 첨단 제조지능 혁신센터 개소 및 장비 기증식 열려
우리 대학 '첨단 제조지능 혁신센터'가 23일 개소했다. 개소식에는 신성철 총장 및 시너스텍 김주헌 회장을 포함한 기부 대표자분들이 함께 참석했다.
본 센터는 산업및시스템 공학과와 기계공학과가 공동으로 첨단 디지털 제조 연구/교육을 위해 설립된 센터다.
본 실습실은 국내 반도체 자동화 업체인 시너스텍, 한국 오므론, 그린파워의 약 15억 가량의 기부로 설립됐고, 특히 세계 최초로 반도체 펩 자동화 설비를 기반으로 구축됐다.
반도체 연구는 보안이슈로 인해 실제 데이터를 다루기가 어렵고 외부인의 공장 내 출입조차 어렵다. 첨단 제조지능 혁신센터는 실제 장비에서 생성되는 데이터를 기반으로 스마트팩토리와 디지털 제조 분야 최고의 연구센터를 지향한다.
2020.07.24 조회수 21784
첨단 제조지능 혁신센터 개소 및 장비 기증식 열려
우리 대학 '첨단 제조지능 혁신센터'가 23일 개소했다. 개소식에는 신성철 총장 및 시너스텍 김주헌 회장을 포함한 기부 대표자분들이 함께 참석했다.
본 센터는 산업및시스템 공학과와 기계공학과가 공동으로 첨단 디지털 제조 연구/교육을 위해 설립된 센터다.
본 실습실은 국내 반도체 자동화 업체인 시너스텍, 한국 오므론, 그린파워의 약 15억 가량의 기부로 설립됐고, 특히 세계 최초로 반도체 펩 자동화 설비를 기반으로 구축됐다.
반도체 연구는 보안이슈로 인해 실제 데이터를 다루기가 어렵고 외부인의 공장 내 출입조차 어렵다. 첨단 제조지능 혁신센터는 실제 장비에서 생성되는 데이터를 기반으로 스마트팩토리와 디지털 제조 분야 최고의 연구센터를 지향한다.
2020.07.24 조회수 21784 -
 신성이엔지-KAIST 연구센터 개소
우리 대학과 국내 대표 반도체 장비 솔루션 기업인 신성이엔지(대표 이완근, 김주헌, 이지선)가‘신성-KAIST 인공지능 자동화 시스템 연구소’를 개소했다.
9일 11시 30분 진행된 이번 개소식에서 두 기관은 중소 및 중견기업의 연구개발을 공동으로 수행하고 개발된 기술을 신속히 사업화하는 4차 산업혁명 시대의 새 산학협력 모델을 제시할 예정이다.
인공지능 기술은 음성 및 이미지 인식, 게임, 엔터테인먼트 분야 등에 활발히 적용되고 있지만 산업계에서의 활용은 걸음마 단계이다. 그러나 전 세계적으로 인공지능의 산업적 활용을 목적으로 한 벤처기업들이 설립 중이고 많은 기업들이 산업 인공지능 기술에 주목하고 있다.
이러한 흐름에 발맞춰 신성이엔지와 우리 대학은 서로 협력해 산업 인공지능 기술을 집중적으로 연구하기 위한 센터를 설립했다.
이번에 개소한 신성-KAIST 인공지능 자동화 시스템 연구소는 인공지능 기반 기술을 활용해 반도체 공장 운영의 핵심인 자동 반송 시스템을 개발하고 사업화해 국내 중견기업이 글로벌 리더로 성공할 수 있는 기술적 기반을 다질 예정이다.
장영재 교수는 "연구센터의 핵심은 학계와 산업계의 벽을 허물어 기업과 학교가 함께 한 팀으로 산업계의 혁신을 만들고 산업AI의 학문을 주도하는데 있다"고 말했다.
2018.04.09 조회수 13496
신성이엔지-KAIST 연구센터 개소
우리 대학과 국내 대표 반도체 장비 솔루션 기업인 신성이엔지(대표 이완근, 김주헌, 이지선)가‘신성-KAIST 인공지능 자동화 시스템 연구소’를 개소했다.
9일 11시 30분 진행된 이번 개소식에서 두 기관은 중소 및 중견기업의 연구개발을 공동으로 수행하고 개발된 기술을 신속히 사업화하는 4차 산업혁명 시대의 새 산학협력 모델을 제시할 예정이다.
인공지능 기술은 음성 및 이미지 인식, 게임, 엔터테인먼트 분야 등에 활발히 적용되고 있지만 산업계에서의 활용은 걸음마 단계이다. 그러나 전 세계적으로 인공지능의 산업적 활용을 목적으로 한 벤처기업들이 설립 중이고 많은 기업들이 산업 인공지능 기술에 주목하고 있다.
이러한 흐름에 발맞춰 신성이엔지와 우리 대학은 서로 협력해 산업 인공지능 기술을 집중적으로 연구하기 위한 센터를 설립했다.
이번에 개소한 신성-KAIST 인공지능 자동화 시스템 연구소는 인공지능 기반 기술을 활용해 반도체 공장 운영의 핵심인 자동 반송 시스템을 개발하고 사업화해 국내 중견기업이 글로벌 리더로 성공할 수 있는 기술적 기반을 다질 예정이다.
장영재 교수는 "연구센터의 핵심은 학계와 산업계의 벽을 허물어 기업과 학교가 함께 한 팀으로 산업계의 혁신을 만들고 산업AI의 학문을 주도하는데 있다"고 말했다.
2018.04.09 조회수 13496 -
 한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
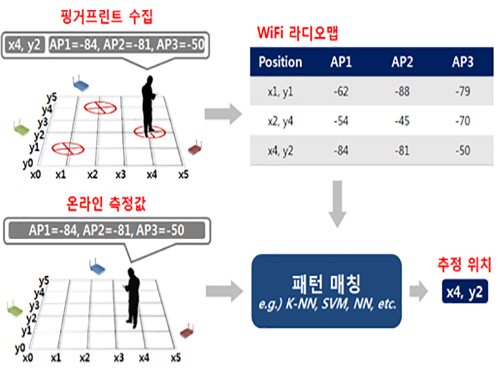
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
2017.04.12 조회수 18859
한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
2017.04.12 조회수 18859 -
 기계공학과 이정권 교수, 국제음향연합회(ICA) 부회장 재선
〈 이 정 권 교수 〉
우리 대학 기계공학과 이정권 교수가 국제음향연합회(International Commission for Acoustics) 부회장에 재선됐다.
이 교수는 지난 2015년 전임 부회장의 유고로 인해 한국인 최초로 부회장에 선출됐다. 이후 잔여 임기를 안정적으로 마치고 재선에 성공해 2019년까지 향후 3년 간 역할을 이어가게 됐다.
또한 이 교수는 3년에 한 번씩 개최되는 국제음향연합회 학술대회(ICA Congress)의 2022년 개최지를 경상북도 경주에 유치하는 데 성공했고, 이 학술대회의 회장으로 선출됐다.
음향분야 최대 규모의 국제 학술대회가 국내에서 개최됨으로써 정보화 사회에서 자동화, 기계학습, 가상현실화 등에 매우 중요한 요소인 음향에 대한 국내 연구진의 사기 진작 및 국제적 위상 향상에 기여할 것으로 기대된다.
1951년 설립된 국제음향연합회는 전 세계 모든 국가에 존재하는 음향학회의 연합회로 현재 46개 국가가 정회원, 4개국이 옵저버 회원으로 등록돼 있다.
그 외에도 오디오공학회(Audio Engineering Society), 국제초음파학술대회(International Congress on Ultrasonics), 국제소음제어공학회(International Institute of Noise Control Engineering) 등 8개의 대규모 국제학회 및 국제학술대회조직이 가입돼 있다.
이 교수는 “국제조직에서의 학술활동은 전 세계의 음향연구 및 적절한 이용을 활성화하는데 더욱 적극적으로 기여하는 의미가 있다”며 “우리나라 젊은 연구자들의 국제적 위상을 높이고 이끄는 역할을 하는 데 도움이 될 것이다”고 말했다.
2016.12.14 조회수 16142
기계공학과 이정권 교수, 국제음향연합회(ICA) 부회장 재선
〈 이 정 권 교수 〉
우리 대학 기계공학과 이정권 교수가 국제음향연합회(International Commission for Acoustics) 부회장에 재선됐다.
이 교수는 지난 2015년 전임 부회장의 유고로 인해 한국인 최초로 부회장에 선출됐다. 이후 잔여 임기를 안정적으로 마치고 재선에 성공해 2019년까지 향후 3년 간 역할을 이어가게 됐다.
또한 이 교수는 3년에 한 번씩 개최되는 국제음향연합회 학술대회(ICA Congress)의 2022년 개최지를 경상북도 경주에 유치하는 데 성공했고, 이 학술대회의 회장으로 선출됐다.
음향분야 최대 규모의 국제 학술대회가 국내에서 개최됨으로써 정보화 사회에서 자동화, 기계학습, 가상현실화 등에 매우 중요한 요소인 음향에 대한 국내 연구진의 사기 진작 및 국제적 위상 향상에 기여할 것으로 기대된다.
1951년 설립된 국제음향연합회는 전 세계 모든 국가에 존재하는 음향학회의 연합회로 현재 46개 국가가 정회원, 4개국이 옵저버 회원으로 등록돼 있다.
그 외에도 오디오공학회(Audio Engineering Society), 국제초음파학술대회(International Congress on Ultrasonics), 국제소음제어공학회(International Institute of Noise Control Engineering) 등 8개의 대규모 국제학회 및 국제학술대회조직이 가입돼 있다.
이 교수는 “국제조직에서의 학술활동은 전 세계의 음향연구 및 적절한 이용을 활성화하는데 더욱 적극적으로 기여하는 의미가 있다”며 “우리나라 젊은 연구자들의 국제적 위상을 높이고 이끄는 역할을 하는 데 도움이 될 것이다”고 말했다.
2016.12.14 조회수 16142