-
 초소형군집위성 1호 발사 및 교신 성공
우리 대학 인공위성연구소가 과기정통부와 국가정보원의 지원을 받아 개발한 '초소형군집위성 1호'가 발사와 교신에 성공했다.
초소형군집위성(총11기)은 한반도 및 주변 해역을 고빈도로 정밀 감시하고 국가안보 및 재난·재해에 신속히 대응하기 위해 2020년부터 개발해온 지구 관측 위성이다.
미국 로캣랩(RocketLab) 社의 일렉트론(Electron) 발사체에 탑재된 '초소형군집위성 1호'는 24일 오전 07시 32분(현지시간 오전 10시 32분)에 뉴질랜드 마히아 발사장에서 발사됐다.발사 후 2분 27초와 9분 15초 뒤 발사체 1·2단이 각각 분리됐으며, 약 50분 만인 오전 8시 22분경 발사체와 최종 분리돼 위성이 최종 궤도에 투입됐다. 이후, 11시57분경(한국시간), 항우연 대전 지상국에서 수신한 위성정보를 분석한 결과, 태양전지판이 정상적으로 전개되어 안정적인 전력을 생산하는 등 위성 상태가 전반적으로 양호한 것으로 확인되었다. 오후 14시 13분 및 15시44분경에 남극 세종기지 지상국과 교신한 결과, 양방향 교신이 정상적으로 이루어져 성공적인 위성 발사를 확인했다.
초소형군집위성 1호는 당초 계획한 궤도(약 500km 상공)에서 위성체 및 광학 탑재체의 성능을 1개월간 시험하고 관측 영상의 품질을 5개월 동안 점검할 계획이다. 점검이 마무리되는 2024년 11월부터 1호 위성은 본격적으로 지구관측 임무를 수행할 수 있게 된다.
초소형군집위성은 이번에 발사 성공된 1호 위성을 시작으로 2026년 및 2027년에 각5기, 총10대의 위성이 한국형 발사체인 누리호로 후속 발사될 예정이다. 2027년 하반기부터 총 11대의 위성이 군집의 형태로 운영‧활용될 경우 한반도를 하루 3번 이상 관측할 수 있게 되어 기존의 중대형 지구관측위성의 역량을 획기적으로 향상시킬 수 있을 것으로 기대를 모으고 있다.한편, 초소형 위성군집시스템 개발사업은 우리 대학이 총괄하는 사업으로, 우리 대학 인공위성연구소가 ㈜쎄트렉아이와 함께 위성시스템을 공동 개발했으, 항우연이 국내 다수 우주기업과 함께 지상시스템‧검보정 및 활용시스템을 개발했다.
초소형군집위성 1호 발사 및 교신 성공
우리 대학 인공위성연구소가 과기정통부와 국가정보원의 지원을 받아 개발한 '초소형군집위성 1호'가 발사와 교신에 성공했다.
초소형군집위성(총11기)은 한반도 및 주변 해역을 고빈도로 정밀 감시하고 국가안보 및 재난·재해에 신속히 대응하기 위해 2020년부터 개발해온 지구 관측 위성이다.
미국 로캣랩(RocketLab) 社의 일렉트론(Electron) 발사체에 탑재된 '초소형군집위성 1호'는 24일 오전 07시 32분(현지시간 오전 10시 32분)에 뉴질랜드 마히아 발사장에서 발사됐다.발사 후 2분 27초와 9분 15초 뒤 발사체 1·2단이 각각 분리됐으며, 약 50분 만인 오전 8시 22분경 발사체와 최종 분리돼 위성이 최종 궤도에 투입됐다. 이후, 11시57분경(한국시간), 항우연 대전 지상국에서 수신한 위성정보를 분석한 결과, 태양전지판이 정상적으로 전개되어 안정적인 전력을 생산하는 등 위성 상태가 전반적으로 양호한 것으로 확인되었다. 오후 14시 13분 및 15시44분경에 남극 세종기지 지상국과 교신한 결과, 양방향 교신이 정상적으로 이루어져 성공적인 위성 발사를 확인했다.
초소형군집위성 1호는 당초 계획한 궤도(약 500km 상공)에서 위성체 및 광학 탑재체의 성능을 1개월간 시험하고 관측 영상의 품질을 5개월 동안 점검할 계획이다. 점검이 마무리되는 2024년 11월부터 1호 위성은 본격적으로 지구관측 임무를 수행할 수 있게 된다.
초소형군집위성은 이번에 발사 성공된 1호 위성을 시작으로 2026년 및 2027년에 각5기, 총10대의 위성이 한국형 발사체인 누리호로 후속 발사될 예정이다. 2027년 하반기부터 총 11대의 위성이 군집의 형태로 운영‧활용될 경우 한반도를 하루 3번 이상 관측할 수 있게 되어 기존의 중대형 지구관측위성의 역량을 획기적으로 향상시킬 수 있을 것으로 기대를 모으고 있다.한편, 초소형 위성군집시스템 개발사업은 우리 대학이 총괄하는 사업으로, 우리 대학 인공위성연구소가 ㈜쎄트렉아이와 함께 위성시스템을 공동 개발했으, 항우연이 국내 다수 우주기업과 함께 지상시스템‧검보정 및 활용시스템을 개발했다.
2024.04.25
조회수 4949
-
 군집 제어로봇 연구 Top 5 논문 선정 및 사업화
우리 대학 산업및시스템공학과 장영재 교수 연구팀과 KAIST 연구소 창업기업인 ‘다임리서치’가 공동으로 개발한 연구가 반도체 운영 관련 국제적인 저널인 ‘IEEE Transactions on Semiconductor Manufacturing’(이하 IEEE TSM)에서 2022년 우수논문(Best Paper: Honorable Mention)에 선정됐다고 5일 밝혔다.
IEEE TSM은 반도체 운영 관련 국제 저널, 한 해 게재된 논문 중 편집장들의 추천을 통해 총 5편의 우수한 논문들을 선정해 이듬해 6월에 발표한다.
장영재 교수 연구팀(제1 저자: 홍상표 박사, 제2 저자: 황일회 박사, 제3 저자-교신저자: 장영재 교수)이 수행한 연구는 공장 내 1,000대 이상의 군집 로봇을 제어하는 기술로 “Practical Q-learning-based route-guidance and vehicle assignment for OHT systems in semiconductor fabs”라는 제목으로 IEEE TSM에 게재됐다.
반도체 공장이 점차 대형화되고 제조 공정이 복잡해짐에 따라 공장 내 운영하는 로봇의 대수도 함께 늘어나고 있는 상황이다. 장영재 교수 연구팀은 공장 운영의 효율성을 개선하기 위해 1,000대 이상의 물류반송 로봇을 인공지능과 디지털 트윈 기술을 활용해 제어하는 기술을 개발해 본 논문에 방법론을 공개했다.
연구팀은 본 연구를 통해 사람의 개입 없이도 로봇이 이상 상황을 스스로 판단해 자율적으로 작업할당 및 운영을 최적화하는 ‘자율 생산 시스템(Autonomous Manufacturing System)’ 개념을 정립하고 그 가능성을 입증했다.
논문의 저자로 주저자 및 제2 저자인 홍상표 박사와 황일회 박사는 장영재 교수 연구실 출신으로 장 교수와 함께 ‘다임리서치 (http://www.daimresearch.com/) ’라는 연구소기업을 창업하여 관련 연구를 사업화했다.
연구팀은 이번 연구를 기반으로 한 소프트웨어를 개발해 글로벌 반도체 업체에 관련 솔루션을 공급하고 있으며 최근에는 포스코 DX와 협업하여 해당 기술을 철강, 2차전지 소재 관련 공장 내 로봇 운영에도 확대 중이다.
반도체와 2차전지와 같은 국가 전략 산업에서 로봇의 역할이 점점 더 중요해지고 있는 시점에서 이번 연구는 학계의 연구가 직접 산업현장의 혁신으로 이어지는 대표 사례라 할 수 있다.
군집 제어로봇 연구 Top 5 논문 선정 및 사업화
우리 대학 산업및시스템공학과 장영재 교수 연구팀과 KAIST 연구소 창업기업인 ‘다임리서치’가 공동으로 개발한 연구가 반도체 운영 관련 국제적인 저널인 ‘IEEE Transactions on Semiconductor Manufacturing’(이하 IEEE TSM)에서 2022년 우수논문(Best Paper: Honorable Mention)에 선정됐다고 5일 밝혔다.
IEEE TSM은 반도체 운영 관련 국제 저널, 한 해 게재된 논문 중 편집장들의 추천을 통해 총 5편의 우수한 논문들을 선정해 이듬해 6월에 발표한다.
장영재 교수 연구팀(제1 저자: 홍상표 박사, 제2 저자: 황일회 박사, 제3 저자-교신저자: 장영재 교수)이 수행한 연구는 공장 내 1,000대 이상의 군집 로봇을 제어하는 기술로 “Practical Q-learning-based route-guidance and vehicle assignment for OHT systems in semiconductor fabs”라는 제목으로 IEEE TSM에 게재됐다.
반도체 공장이 점차 대형화되고 제조 공정이 복잡해짐에 따라 공장 내 운영하는 로봇의 대수도 함께 늘어나고 있는 상황이다. 장영재 교수 연구팀은 공장 운영의 효율성을 개선하기 위해 1,000대 이상의 물류반송 로봇을 인공지능과 디지털 트윈 기술을 활용해 제어하는 기술을 개발해 본 논문에 방법론을 공개했다.
연구팀은 본 연구를 통해 사람의 개입 없이도 로봇이 이상 상황을 스스로 판단해 자율적으로 작업할당 및 운영을 최적화하는 ‘자율 생산 시스템(Autonomous Manufacturing System)’ 개념을 정립하고 그 가능성을 입증했다.
논문의 저자로 주저자 및 제2 저자인 홍상표 박사와 황일회 박사는 장영재 교수 연구실 출신으로 장 교수와 함께 ‘다임리서치 (http://www.daimresearch.com/) ’라는 연구소기업을 창업하여 관련 연구를 사업화했다.
연구팀은 이번 연구를 기반으로 한 소프트웨어를 개발해 글로벌 반도체 업체에 관련 솔루션을 공급하고 있으며 최근에는 포스코 DX와 협업하여 해당 기술을 철강, 2차전지 소재 관련 공장 내 로봇 운영에도 확대 중이다.
반도체와 2차전지와 같은 국가 전략 산업에서 로봇의 역할이 점점 더 중요해지고 있는 시점에서 이번 연구는 학계의 연구가 직접 산업현장의 혁신으로 이어지는 대표 사례라 할 수 있다.
2023.07.05
조회수 5997
-
 산업및시스템공학과 장영재 교수, 디지털혁신 SW부문 대상(과기부 장관상) 수상
우리 대학 산업및시스템공학과 장영재 교수가 CDE학회(Society for Computational Design and Engineering)에서 주관하는 2022 디지털혁신 SW 공모전에서 대상인 '과기부 장관상'을 수상하였다.
장영재 교수 연구진은 2016년부터 강화학습 기반 대규모 군집 물류 자동화 로봇을 제어하는 SW개발을 진행해왔다. 관련 기술은 2019년 KAIST 10대 기술로 선정되었으며 IEEE SMILE과 CIRP등에서 최고 논문으로 선정되기도 하였다.
KAIST의 원천 기술을 기반으로 장영재 교수 연구실 출신 박사들이 <다임리서치>란 스타트업을 2020년 설립하였으며 작년 SW 개발에 성공 글로벌 반도체, 평판디스플레이, 전기차 베터리 (2차전지)제조 공장에 SW를 공급하고 있다. KAIST 연구소 기업인 <다임리서치>는 인공지능기술과 디지털트윈 기술을 결합한 제조 SW기업으로 성장중이다.
장영재 교수는 "이번 대상수상은 KAIST 기술을 통한 사업화 및 산업계 기여에 의미를 둔다"라 언급하였다.
산업및시스템공학과 장영재 교수, 디지털혁신 SW부문 대상(과기부 장관상) 수상
우리 대학 산업및시스템공학과 장영재 교수가 CDE학회(Society for Computational Design and Engineering)에서 주관하는 2022 디지털혁신 SW 공모전에서 대상인 '과기부 장관상'을 수상하였다.
장영재 교수 연구진은 2016년부터 강화학습 기반 대규모 군집 물류 자동화 로봇을 제어하는 SW개발을 진행해왔다. 관련 기술은 2019년 KAIST 10대 기술로 선정되었으며 IEEE SMILE과 CIRP등에서 최고 논문으로 선정되기도 하였다.
KAIST의 원천 기술을 기반으로 장영재 교수 연구실 출신 박사들이 <다임리서치>란 스타트업을 2020년 설립하였으며 작년 SW 개발에 성공 글로벌 반도체, 평판디스플레이, 전기차 베터리 (2차전지)제조 공장에 SW를 공급하고 있다. KAIST 연구소 기업인 <다임리서치>는 인공지능기술과 디지털트윈 기술을 결합한 제조 SW기업으로 성장중이다.
장영재 교수는 "이번 대상수상은 KAIST 기술을 통한 사업화 및 산업계 기여에 의미를 둔다"라 언급하였다.
2022.02.17
조회수 9514
-
 김희영 교수, 반도체 기판 내 불량칩 탐지, 군집화 기술 개발
〈 이영민 박사과정, 김희영 교수, 김진호 석사 〉
우리 대학 산업및시스템공학과 김희영 교수 연구팀이 반도체 기판 내 여러 형태의 혼합된 불량 칩 패턴을 효과적으로 탐지하고 군집화하는 기술을 개발했다.
이번 연구 결과는 산업공학 분야 저명 국제 학술지 ‘IISE Transactions’ 2월호에 게재됐다. 특히 이 논문은 특집 기사(featured article)로 선정돼 ‘ISE(Industrial and Systems Engineering)’ 매거진 1월호에도 게재됐다.
반도체 기판 제조공정은 기판 표면에 집적회로를 형성하는 복잡한 일련의 공정을 통해 구성된다. 기판 가공이 끝나면 기판 내 각 칩의 불량 여부를 테스트하는 과정을 거친다.
이 때 불량칩은 공정 이상 원인에 따라 특정한 패턴(예 : 원, 링, 스크래치 등)을 보이며 분포한다고 알려져 있다. 불량칩의 분포 패턴을 분석하는 것은 공정 이상을 탐지하고 그 원인을 파악하는데 중요한 단서를 제공한다.
최근 반도체 제조 공정이 점점 복잡해짐에 따라 한 기판 안에 여러 형태의 불량칩 패턴이 혼재되는 사례가 증가하고 있다. 연구팀은 다수의 불량칩 패턴을 효과적으로 파악하기 위해 일정 패턴을 형성하고 있는 불량칩을 선택한 후 여러 개의 특정 패턴으로 군집화하는 방법을 제시했다.
연구팀은 무작위 분포가 아닌 특정 패턴을 형성하고 있는 불량칩을 효과적으로 탐지할 수 있는 CPF(connected-path filtering) 기술을 개발했다. CPF는 특히 스크래치 형태로 분포된 불량칩 탐지에 탁월한 성능 향상을 보였다.
탐지한 불량칩을 다수의 패턴별로 군집화하는 과정에서는 사전에 서로 다른 몇 개의 패턴이 혼재됐는지 알지 못한다는 점과 각 패턴이 복잡한 모양을 가진다는 점이 어려움으로 남아 있었다. 이를 해결하기 위해 연구팀은 무한 비선형 혼합 모형(infinite warped mixture model)을 이용함으로써 군집화 과정에서 데이터가 스스로 군집 수를 결정할 수 있도록 했다.
또한 복잡한 모양의 패턴을 바로 이용하는 대신 은닉 공간(latent space)에서의 단순한 모양의 패턴을 이용해 보다 효과적으로 군집화하는 데 성공했다.
연구팀은 SK 하이닉스의 실제 반도체 데이터를 활용해 제안된 방법을 검증함으로써 실제 반도체 제조 현장 문제를 효과적으로 해결할 수 있음을 확인했다.
이번 연구에 1저자로 참여한 김진호 석사졸업생은 SK 하이닉스의 수학 파견 인원으로 선발돼 석사과정 동안 2저자인 이영민 박사과정과 공동 연구를 수행했다. 김진호 졸업생은 현재 SK 하이닉스 수석 엔지니어로 근무하고 있으며 Alius TEST 기술팀을 이끌고 있다.
□ 그림 설명
그림1. CPF 적용 전, 후 결과
그림2. 여러형태의 혼합된 불량칩 패턴과 각 특정 패턴으로 군집화된 불량칩 패턴
김희영 교수, 반도체 기판 내 불량칩 탐지, 군집화 기술 개발
〈 이영민 박사과정, 김희영 교수, 김진호 석사 〉
우리 대학 산업및시스템공학과 김희영 교수 연구팀이 반도체 기판 내 여러 형태의 혼합된 불량 칩 패턴을 효과적으로 탐지하고 군집화하는 기술을 개발했다.
이번 연구 결과는 산업공학 분야 저명 국제 학술지 ‘IISE Transactions’ 2월호에 게재됐다. 특히 이 논문은 특집 기사(featured article)로 선정돼 ‘ISE(Industrial and Systems Engineering)’ 매거진 1월호에도 게재됐다.
반도체 기판 제조공정은 기판 표면에 집적회로를 형성하는 복잡한 일련의 공정을 통해 구성된다. 기판 가공이 끝나면 기판 내 각 칩의 불량 여부를 테스트하는 과정을 거친다.
이 때 불량칩은 공정 이상 원인에 따라 특정한 패턴(예 : 원, 링, 스크래치 등)을 보이며 분포한다고 알려져 있다. 불량칩의 분포 패턴을 분석하는 것은 공정 이상을 탐지하고 그 원인을 파악하는데 중요한 단서를 제공한다.
최근 반도체 제조 공정이 점점 복잡해짐에 따라 한 기판 안에 여러 형태의 불량칩 패턴이 혼재되는 사례가 증가하고 있다. 연구팀은 다수의 불량칩 패턴을 효과적으로 파악하기 위해 일정 패턴을 형성하고 있는 불량칩을 선택한 후 여러 개의 특정 패턴으로 군집화하는 방법을 제시했다.
연구팀은 무작위 분포가 아닌 특정 패턴을 형성하고 있는 불량칩을 효과적으로 탐지할 수 있는 CPF(connected-path filtering) 기술을 개발했다. CPF는 특히 스크래치 형태로 분포된 불량칩 탐지에 탁월한 성능 향상을 보였다.
탐지한 불량칩을 다수의 패턴별로 군집화하는 과정에서는 사전에 서로 다른 몇 개의 패턴이 혼재됐는지 알지 못한다는 점과 각 패턴이 복잡한 모양을 가진다는 점이 어려움으로 남아 있었다. 이를 해결하기 위해 연구팀은 무한 비선형 혼합 모형(infinite warped mixture model)을 이용함으로써 군집화 과정에서 데이터가 스스로 군집 수를 결정할 수 있도록 했다.
또한 복잡한 모양의 패턴을 바로 이용하는 대신 은닉 공간(latent space)에서의 단순한 모양의 패턴을 이용해 보다 효과적으로 군집화하는 데 성공했다.
연구팀은 SK 하이닉스의 실제 반도체 데이터를 활용해 제안된 방법을 검증함으로써 실제 반도체 제조 현장 문제를 효과적으로 해결할 수 있음을 확인했다.
이번 연구에 1저자로 참여한 김진호 석사졸업생은 SK 하이닉스의 수학 파견 인원으로 선발돼 석사과정 동안 2저자인 이영민 박사과정과 공동 연구를 수행했다. 김진호 졸업생은 현재 SK 하이닉스 수석 엔지니어로 근무하고 있으며 Alius TEST 기술팀을 이끌고 있다.
□ 그림 설명
그림1. CPF 적용 전, 후 결과
그림2. 여러형태의 혼합된 불량칩 패턴과 각 특정 패턴으로 군집화된 불량칩 패턴
2018.06.12
조회수 15313
-
 허원도 교수, 빛으로 단백질군집형성 속도 10배 높이는 새 광유전학 기술 개발
〈 허 원 도 교수 〉
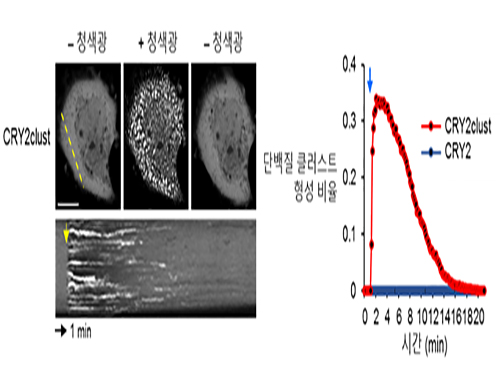
우리 대학 생명과학과 허원도 교수 연구팀이 청색광 수용 단백질인 크립토크롬2(Cryptochrome2)를 변형한 크립토크롬2 클러스트(CRY2clust)를 개발했다.
이를 통해 기존에 비해 약 10배 더 빠른 반응속도로 단백질 군집을 형성하는 데 성공했다.
이번 연구결과는 네이처 자매지인 ‘네이처 커뮤니케이션즈(Nature Communications)’ 23일자에 게재됐다.
세포막 단백질이나 신호전달 단백질, 효소 등 많은 단백질은 자신들끼리 서로 군집을 이룰 때 제 기능이 활성화된다. 그 동안 화학물질을 이용해 단백질 군집 형성을 유도하려는 노력이 이뤄져왔으나 부작용과 시간적 제약 등 한계가 있었다.
광유전학 분야 연구자들은 화학물질을 사용하지 않는 대신 빛을 이용해 단백질 군집을 형성하고자 식물의 청색광 수용 단백질인 크립토크롬2를 활용했다.
허원도 교수 연구팀은 크립토크롬2의 일부 구조를 변형해 기존 크립토크롬2를 활용한 광유전학 기술보다 단백질 군집을 더 빠르게 만들 수 있는 방법을 찾았다.
크립토크롬2의 단백질 사슬 C말단(C-terminal)에 9개의 아미노산 잔기로 구성된 매우 짧은 펩티드(Peptide)를 부착하자 일반 크립토크롬2보다 빛에 10배 이상 더 빠르게 반응한다는 사실을 관찰한 것이다.
연구진은 이 기술을 CRY2clust라 이름 붙였다.
연구팀은 과거 자체 개발한 광유전학 기술에 CRY2clust를 접목해 CRY2을 이용한 기존 시스템과의 단백질 활성 효율의 차이를 확인했다. CRY2clust를 사용하면 빛으로 세포막의 칼슘이온채널을 훨씬 빠르게 끄고 켜거나(광유도 칼슘이온채널 활성 시스템 ; OptoSTIM1) 신경세포의 분화를 더욱 효율적으로 조절(광유도 신경성장인자 수용체 활성 시스템 ; OptoTrkB)할 수 있었다.
연구진은 더 나아가 실험실에서 단백질 군집 형성에 주로 활용하는 여러 형광단백질(Fluorescent protein)과 크립토크롬2를 짝지어 결합해봄으로써 빛을 이용해 단백질 군집을 더 효율적으로 만들 수 있는 조합의 조건을 찾았다.
형광단백질이 하나보다는 여러 개가 결합한 형태일수록 빛을 비추었을 때 광유도 클러스트를 더욱 높은 비율로 형성했다. 또한 형광단백질을 크립토크롬2의 단백질 사슬 말단 중 N말단이 아닌 C말단에 붙이는 경우 광유도 클러스트 형성 효율이 더 높은 것으로 확인됐다. 단백질 군집이 잘 형성되는 조건을 찾았다는 점에서 연구자의 실험 선택의 폭을 넓혀준 데 의의가 있다.
허원도 교수 연구팀은 CRY2clust를 개발해 빛을 이용한 단백질의 활성을 훨씬 효율적으로 유도하는데 성공했다.
허원도 교수는 “이번 연구에서 개발한 CRY2clust는 향후 광유전학 분야의 실험에 유용한 도구가 될 것이다”며“다양한 형광단백질-CRY2 조합을 통해 찾은 단백질 군집 형성 성공 요인은 광유전학 시스템 개발에 길잡이 역할을 할 것이다”고 말했다.
□ 그림 설명
그림1. 기존 크립토크롬2 대비 CRY2clust의 단백질 군집 형성 속도
그림2. CRY2clust 시스템을 적용한 광유도 단백질 기능 조절
그림3. 형광단백질을 이용한 다양한 단백질 군집 형성
허원도 교수, 빛으로 단백질군집형성 속도 10배 높이는 새 광유전학 기술 개발
〈 허 원 도 교수 〉
우리 대학 생명과학과 허원도 교수 연구팀이 청색광 수용 단백질인 크립토크롬2(Cryptochrome2)를 변형한 크립토크롬2 클러스트(CRY2clust)를 개발했다.
이를 통해 기존에 비해 약 10배 더 빠른 반응속도로 단백질 군집을 형성하는 데 성공했다.
이번 연구결과는 네이처 자매지인 ‘네이처 커뮤니케이션즈(Nature Communications)’ 23일자에 게재됐다.
세포막 단백질이나 신호전달 단백질, 효소 등 많은 단백질은 자신들끼리 서로 군집을 이룰 때 제 기능이 활성화된다. 그 동안 화학물질을 이용해 단백질 군집 형성을 유도하려는 노력이 이뤄져왔으나 부작용과 시간적 제약 등 한계가 있었다.
광유전학 분야 연구자들은 화학물질을 사용하지 않는 대신 빛을 이용해 단백질 군집을 형성하고자 식물의 청색광 수용 단백질인 크립토크롬2를 활용했다.
허원도 교수 연구팀은 크립토크롬2의 일부 구조를 변형해 기존 크립토크롬2를 활용한 광유전학 기술보다 단백질 군집을 더 빠르게 만들 수 있는 방법을 찾았다.
크립토크롬2의 단백질 사슬 C말단(C-terminal)에 9개의 아미노산 잔기로 구성된 매우 짧은 펩티드(Peptide)를 부착하자 일반 크립토크롬2보다 빛에 10배 이상 더 빠르게 반응한다는 사실을 관찰한 것이다.
연구진은 이 기술을 CRY2clust라 이름 붙였다.
연구팀은 과거 자체 개발한 광유전학 기술에 CRY2clust를 접목해 CRY2을 이용한 기존 시스템과의 단백질 활성 효율의 차이를 확인했다. CRY2clust를 사용하면 빛으로 세포막의 칼슘이온채널을 훨씬 빠르게 끄고 켜거나(광유도 칼슘이온채널 활성 시스템 ; OptoSTIM1) 신경세포의 분화를 더욱 효율적으로 조절(광유도 신경성장인자 수용체 활성 시스템 ; OptoTrkB)할 수 있었다.
연구진은 더 나아가 실험실에서 단백질 군집 형성에 주로 활용하는 여러 형광단백질(Fluorescent protein)과 크립토크롬2를 짝지어 결합해봄으로써 빛을 이용해 단백질 군집을 더 효율적으로 만들 수 있는 조합의 조건을 찾았다.
형광단백질이 하나보다는 여러 개가 결합한 형태일수록 빛을 비추었을 때 광유도 클러스트를 더욱 높은 비율로 형성했다. 또한 형광단백질을 크립토크롬2의 단백질 사슬 말단 중 N말단이 아닌 C말단에 붙이는 경우 광유도 클러스트 형성 효율이 더 높은 것으로 확인됐다. 단백질 군집이 잘 형성되는 조건을 찾았다는 점에서 연구자의 실험 선택의 폭을 넓혀준 데 의의가 있다.
허원도 교수 연구팀은 CRY2clust를 개발해 빛을 이용한 단백질의 활성을 훨씬 효율적으로 유도하는데 성공했다.
허원도 교수는 “이번 연구에서 개발한 CRY2clust는 향후 광유전학 분야의 실험에 유용한 도구가 될 것이다”며“다양한 형광단백질-CRY2 조합을 통해 찾은 단백질 군집 형성 성공 요인은 광유전학 시스템 개발에 길잡이 역할을 할 것이다”고 말했다.
□ 그림 설명
그림1. 기존 크립토크롬2 대비 CRY2clust의 단백질 군집 형성 속도
그림2. CRY2clust 시스템을 적용한 광유도 단백질 기능 조절
그림3. 형광단백질을 이용한 다양한 단백질 군집 형성
2017.06.26
조회수 16037
-
 명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
2013.08.19
조회수 18258
-
 정송교수팀, 인간 이동패턴 모델(Self-similar Least Action Walk, SLAW) 개발
- 전염병 통제, 도시, 교통망 및 통신망 설계 등 활용 전망
전기 및 전자공학과 정송 교수(44)팀과 미국 노스캐롤라이나 주립대 전산학과 이인종 교수(43)팀은 사람들이 일상생활에서 이동하는 패턴을 더욱 정확히 묘사할 수 있는 새로운 통계적 모델을 개발했다.
이 연구결과는 신종 인플루엔자나 에이즈 같은 전염성 질병의 확산 통제나 효율적인 도시 교통망 설계, 이동통신망 설계 등 다양한 분야에 활용될 것으로 기대된다.
두 연구팀은 지난 2년여 간의 공동 연구를 통한 대규모 측정 데이터를 근거로 일상생활에서 인간의 주기적인 이동 패턴을 분석하고 이러한 이동패턴이 발생하는 원인을 규명했다.
연구진은 한국과 미국의 대학 캠퍼스, 뉴욕 맨해튼, 디즈니월드 등 서로 다른 다섯 곳에서 총 100명 이상의 자원자에게 GPS(위치정보시스템) 장비를 나눠주고 총 226일 동안 그들의 움직임을 분석했다. 이들은 각 자원자가 멈춰 섰던 장소들을 2차원 지도상에 도식화하고 이동경로를 그 위에 겹쳐 그리는 방식으로 이동 특성을 연구했다.
그 결과 자원자들은 지리적으로 가까운 장소들의 군집(Cluster)에서 다양한 활동들을 하는 것으로 나타났다. 예를 들면 쇼핑과 식사, 은행 방문 등이 가까운 장소에서 연이어 이뤄졌다. 자원자들은 또 사람들 사이에서 인기가 많은 장소들을 방문하는 빈도가 높았다.
정 교수는 이에 대해 “사람들은 시간과 에너지를 효과적으로 사용하기 위해 지리적으로 근접한 곳에서 해야 할 활동들을 군집화(Clustering)하며 이로 인해 실제 사람들의 움직임은 방문장소들이 군집된 지역 내에서의 수많은 짧은 거리이동과 군집 지역간의 소수의 장거리 이동이 합쳐진 형태로 나타난다” 고 설명했다.
연구진은 이런 이동패턴의 근본적인 통계적 속성들을 이용해 사람들이 하루 동안 보여주는 정규 이동 패턴을 효과적으로 묘사하는 모델(SLAW : Self-similar Least Action Walk)을 개발했다.
이 모델을 이용하면 실제 사람이나 차량들의 움직임을 일일이 추척하지 않고도 전염성 질병의 확산 경로, 특정 장소나 거리에서의 유동인구나 교통량, 이동통신 사용자 수 등 다양한 정보들을 예측할 수 있다.
연구팀 관계자는 “SLAW 모델은 공중 보건 당국의 전염성 전파 및 통제 연구나 도시 및 교통망 설계, 통신 사업자들의 이동통신망 설계 등 사람들이 어떤 방식으로 움직이는지에 대한 예측이 필요한 다양한 분야에 효과적으로 사용될 수 있다”고 말했다.
연구진은 이 연구 결과를 지난달 브라질 리우데자네이루에서 열린 네트워크분야 최고 학회 ‘IEEE INFOCOM 2009’에서 발표했으며, 물리학 분야 최고 학술지 ‘Physical Review Letter’에 제출한 상태다. 이번 연구는 전기 및 전자공학과 이경한(28, 박사과정)학생의 박사학위 논문연구의 일부로서 진행됐으며, 미국 노스캐롤라이나 주립대 홍성익(36, 박사과정), 김성준(31, 박사후과정), 이인종교수(43)가 공동 연구자로 참여했다.
정송교수팀, 인간 이동패턴 모델(Self-similar Least Action Walk, SLAW) 개발
- 전염병 통제, 도시, 교통망 및 통신망 설계 등 활용 전망
전기 및 전자공학과 정송 교수(44)팀과 미국 노스캐롤라이나 주립대 전산학과 이인종 교수(43)팀은 사람들이 일상생활에서 이동하는 패턴을 더욱 정확히 묘사할 수 있는 새로운 통계적 모델을 개발했다.
이 연구결과는 신종 인플루엔자나 에이즈 같은 전염성 질병의 확산 통제나 효율적인 도시 교통망 설계, 이동통신망 설계 등 다양한 분야에 활용될 것으로 기대된다.
두 연구팀은 지난 2년여 간의 공동 연구를 통한 대규모 측정 데이터를 근거로 일상생활에서 인간의 주기적인 이동 패턴을 분석하고 이러한 이동패턴이 발생하는 원인을 규명했다.
연구진은 한국과 미국의 대학 캠퍼스, 뉴욕 맨해튼, 디즈니월드 등 서로 다른 다섯 곳에서 총 100명 이상의 자원자에게 GPS(위치정보시스템) 장비를 나눠주고 총 226일 동안 그들의 움직임을 분석했다. 이들은 각 자원자가 멈춰 섰던 장소들을 2차원 지도상에 도식화하고 이동경로를 그 위에 겹쳐 그리는 방식으로 이동 특성을 연구했다.
그 결과 자원자들은 지리적으로 가까운 장소들의 군집(Cluster)에서 다양한 활동들을 하는 것으로 나타났다. 예를 들면 쇼핑과 식사, 은행 방문 등이 가까운 장소에서 연이어 이뤄졌다. 자원자들은 또 사람들 사이에서 인기가 많은 장소들을 방문하는 빈도가 높았다.
정 교수는 이에 대해 “사람들은 시간과 에너지를 효과적으로 사용하기 위해 지리적으로 근접한 곳에서 해야 할 활동들을 군집화(Clustering)하며 이로 인해 실제 사람들의 움직임은 방문장소들이 군집된 지역 내에서의 수많은 짧은 거리이동과 군집 지역간의 소수의 장거리 이동이 합쳐진 형태로 나타난다” 고 설명했다.
연구진은 이런 이동패턴의 근본적인 통계적 속성들을 이용해 사람들이 하루 동안 보여주는 정규 이동 패턴을 효과적으로 묘사하는 모델(SLAW : Self-similar Least Action Walk)을 개발했다.
이 모델을 이용하면 실제 사람이나 차량들의 움직임을 일일이 추척하지 않고도 전염성 질병의 확산 경로, 특정 장소나 거리에서의 유동인구나 교통량, 이동통신 사용자 수 등 다양한 정보들을 예측할 수 있다.
연구팀 관계자는 “SLAW 모델은 공중 보건 당국의 전염성 전파 및 통제 연구나 도시 및 교통망 설계, 통신 사업자들의 이동통신망 설계 등 사람들이 어떤 방식으로 움직이는지에 대한 예측이 필요한 다양한 분야에 효과적으로 사용될 수 있다”고 말했다.
연구진은 이 연구 결과를 지난달 브라질 리우데자네이루에서 열린 네트워크분야 최고 학회 ‘IEEE INFOCOM 2009’에서 발표했으며, 물리학 분야 최고 학술지 ‘Physical Review Letter’에 제출한 상태다. 이번 연구는 전기 및 전자공학과 이경한(28, 박사과정)학생의 박사학위 논문연구의 일부로서 진행됐으며, 미국 노스캐롤라이나 주립대 홍성익(36, 박사과정), 김성준(31, 박사후과정), 이인종교수(43)가 공동 연구자로 참여했다.
2009.05.13
조회수 22123