연구

우리 대학 기계공학과 김정, 박인규 교수 공동 연구팀이 실리콘과 탄소 소재를 활용한 로봇의 피부 역할을 할 수 있는 촉각 센서를 개발했다.
이 기술은 충격 흡수가 가능하면서 다양한 형태의 촉감을 구분할 수 있어 향후 로봇의 외피로 이용 가능할 것으로 기대된다.
이효상 박사과정이 1저자로 참여한 이번 연구결과는 네이처 자매지인 ‘사이언티픽 리포트(Scientific Report)’ 1월 25일자 온라인 판에 게재됐다.
피부는 인체에서 가장 많은 부분을 차지하는 기관이며 주요 장기를 외부 충격으로부터 보호하는 동시에 섬세한 촉각 정보를 측정 및 구분해 신경계에 전달하는 역할을 한다.
현재 로봇 감각 기술은 시각, 청각 부분에서는 인간의 능력에 근접하고 있으나 촉각의 경우는 환경의 변화를 온몸으로 감지하는 피부 능력에 비해 많이 부족한 것이 사실이다
인간과 비슷한 기능의 피부를 로봇에게 적용시키기 위해선 높은 신축성을 갖고 충격을 잘 흡수하는 피부 센서 기술의 개발이 필수이다. 전기 배선을 통해 몸 전체에 분포된 많은 센서를 연결하는 기술 또한 해결해야 할 문제이다.
연구팀은 문제 해결을 위해 실리콘과 탄소나노튜브(CNT)를 혼합해 복합재를 만들었고 이를 전기임피던스영상법(EIT)라는 의료 영상 기법과 결합했다. 이를 통해 넓은 영역에 가해지는 다양한 형태의 힘을 전기 배선 없이도 구분할 수 있는 기술을 개발했다.
이를 통해 개발된 로봇 피부는 망치로 내려치는 수준의 강한 충격도 견딜 수 있으며 센서의 일부가 파손돼도 파손 부위에 복합재를 채운 뒤 경화시키면 재사용이 가능하다.
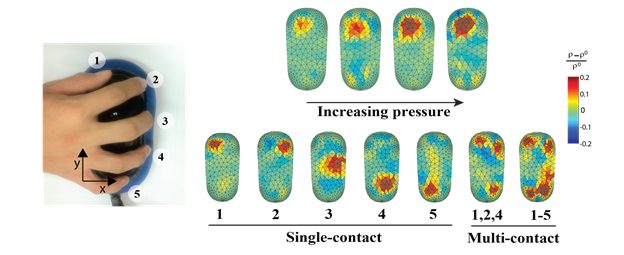
또한 3D 프린터 등으로 만들어진 3차원 형상 틀에 실리콘-나노튜브 복합재를 채워 넣는 방식으로 제작할 수 있다. 기존 2차원 평판 뿐 아니라 다양한 3차원 곡면으로 제작이 가능해 새로운 형태의 컴퓨터 인터페이스도 개발할 수 있다.
이 기술은 다른 형태의 위치나 크기 등을 촉각적으로 구분할 수 있고 충격 흡수가 가능한 로봇의 피부, 3차원 컴퓨터 인터페이스, 촉각 센서 등에 적용 가능할 것으로 예상된다.
특히 이번 연구는 나노 구조체 및 센서 분야의 전문가인 박인규 교수와 바이오 로봇 분야 전문가인 김정 교수가 공동으로 진행해 실제 제품 적용 가능성이 높다.
김정 교수는 “신축성 촉각 센서는 인체에 바로 부착 가능할 뿐 아니라 다차원 변형상태에 대한 정보를 제공할 수 있다”며 “로봇 피부를 포함한 소프트 로봇 산업 및 착용형 의료기기 분야에 기여할 것이다”고 말했다.
박인규 교수는 “기능성 나노 복합소재와 컴퓨터단층법의 융합을 이용해 차세대 유저인터페이스를 구현한 것이다”고 말했다.
이번 연구는 1저자 이효상 박사과정 외 권동욱, 조지승 연구원과의 공동연구로 진행됐고, 미래창조과학부 이공분야 기초연구사업(중견연구자 지원사업)과 초정밀 광기계기술 연구센터(선도연구센터지원사업)의 지원으로 수행됐다.
□ 그림 설명
그림1. 제작한 촉각 센서와 연결돼 저항에 반응하는 로봇 손
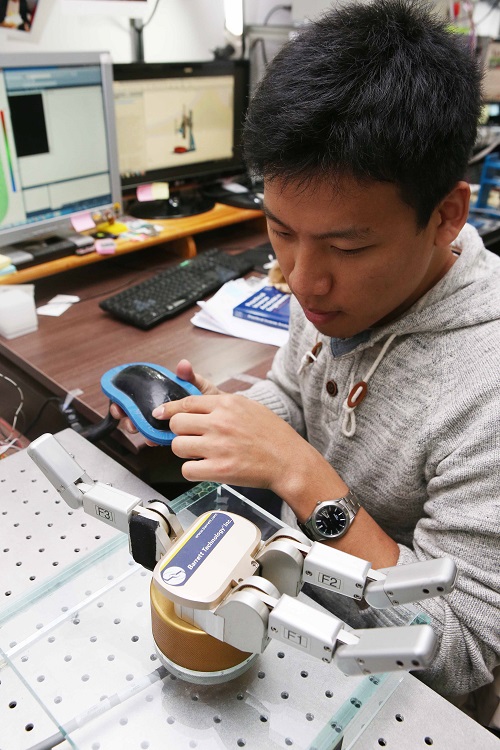
그림2. 실리콘 고무와 카본나노튜브를 이용한 압저항 복합재 제작 과정
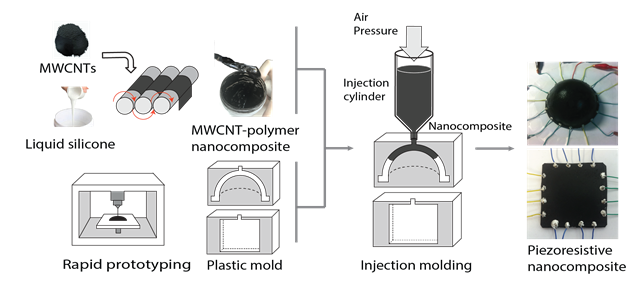
그림3. 압저항 복합재를 활용한 컴퓨터 인터페이스
-
연구 가벼운 숨결·압력·소리까지 감지, 맞춤형 촉각 센서 개발
로봇이 물체를 잡을 때나, 의료기기가 몸의 맥박을 감지할 때 촉각 센서는 손끝처럼 ‘눌림’을 느끼는 기술이다. 기존 센서들은 반응이 느리거나 여러 번 쓰면 정확도가 떨어지는 단점이 있었는데, 한국 연구진이 가벼운 숨결, 압력, 소리까지 정확하고 빠르게 감지할 수 있어, 일상적인 움직임부터 의료용 진단까지 폭넓게 사용할 수 있는 센서를 개발하는데 성공했다. 우리 대학 기계공학과 박인규 교수 연구팀이 국가과학기술연구회(NST, 이사장 김영식) 산하 한국전자통신연구원(ETRI, 원장 방승찬)과의 공동연구를 통해 기존 촉각 센서 기술의 구조적 한계를 극복한 혁신적 기술을 개발했다고 23일 밝혔다. 이번 공동연구의 핵심은 ‘열성형 기반 3차원 전자 구조(Thermoformed 3D Electronics, T3DE)’를 적용해 유연성과 정밀성, 반복 내구성을 동시에 확보한 맞춤형 촉각 센서를 구현한 것이다. 특히, 소프트 엘라스토머(고
2025-06-23 -
행사 아이디스와 함께 실리콘밸리 캠퍼스 구축, 글로벌 창업 본격화
우리 대학은 22일 대전 본원에서 글로벌 영상보안 전문기업 아이디스(IDIS, 회장 김영달)와 ‘KAIST-아이디스 실리콘밸리 창업 캠퍼스 구축’을 위한 업무협약을 체결한다. 이번 협약은 실리콘밸리에 ‘KAIST 실리콘밸리 아이디스 캠퍼스’를 조성하고, 이를 거점으로 세계 수준의 창업 교육과 기업 현장 체험 기회를 제공하기 위한 것이다. 이를 통해 KAIST는 글로벌 창업 혁신 인재 양성에 박차를 가할 계획이다. 우리 대학은 2022년 뉴욕대학교(NYU)와 공동으로 ‘KAIST NYU 조인트 캠퍼스’를 설립하고, 인공지능(AI), 신경과학, 데이터 과학 등 첨단 융합 분야에서의 공동 학위과정과 연구 협력을 이어오고 있다. 이번 실리콘밸리 캠퍼스 구축은 동부 뉴욕대 중심의 첨단 연구 협력에 이어, 서부 실리콘밸리의 창업생태계까지 아우를 수 있다는 점에서 KAIST의 포괄적 글로벌 전략을 보여주는 의미있는 행보로
2025-04-22 -
행사 2024 제3회 실리콘밸리 글로벌 기업가정신 써머스쿨(GESS) 성료
우리 대학 국제협력처 글로벌전략사업추진단(단장 임만성)이 올해 세 번째로 개최한 '2024 글로벌 기업가정신 써머스쿨(GESS; Global Entrepreneurship Summer School, 이하 2024 KAIST GESS)'가 성료됐다. KAIST GESS는 학생들이 세계적인 창업 허브인 실리콘밸리 지역을 방문해 창업 생태계를 직접 경험하고, 글로벌 진출을 위한 역량을 함양할 수 있도록 기획된 프로그램이다. 서류, 면접 및 발표 심사, 멘토링 및 동료 평가를 거쳐 선발된 20명과 우리 대학 경영대학 소속 임팩트(Impact) MBA 교육과정생 17명 등 총 37명이 참가했다. 참가자들은 지난 5월부터 약 2개월간 우리 대학에 재학 중인 선배 창업가로부터 비즈니스 모델 개발 및 투자발표에 대한 멘토링을 받은 후 대전 본원 캠퍼스에서 팀별 사업 아이템을 발전시켰다. 이후 지난달 23일부터 7일간 미국 현지 코트라 실리콘밸리 무역관, 제이피 모건(JP Morgan),
2024-07-05 -
행사 현대차그룹과 ′차세대 라이다 시스템′ 공동연구
우리 대학이 '현대차그룹-KAIST 온칩 라이다(On-Chip LiDAR) 개발 공동연구실(이하 공동연구실)'을 대전 본원에 개소했다. 공동연구실은 발전하는 자율주행 시장에서 완전자율주행(4~5단계)을 위한 라이다 센서를 개발하기 위한 연구에 주력한다. 실리콘 포토닉스(광반도체)를 활용해 센서의 크기는 줄이는 동시에 성능은 높일 수 있는 온칩 센서 제작 기술과 차세대 신호검출 방식을 도입할 수 있는 핵심기술 개발이 목표다. 공동연구실은 김상현, 김상식, 정완영, 함자 쿠르트(Hamza Kurt) 교수 등 우리 대학 전기및전자공학부 연구팀과 현대차그룹 선행기술원 연구팀 등 약 30여 명 규모로 구성돼 2028년까지 4년간 운영된다. 우리 대학은 ▴실리콘 포토닉스 기반 소형 온칩 라이다용 소자개발 ▴라이다 구동을 위한 고속, 고출력 구동 집적회로(IC) 제작, ▴라이다 시스템 최적화 설계 및 검증 등 연구팀별로 특화된 전문 분야에서 세부 연구를 주도한다. 특히, 실리콘 포토
2024-02-21 -
연구 고용량 배터리 수명 증대 영상화하다
전기자동차에서 볼 수 있는 고용량 배터리에 사용되고 있는 실리콘 활물질은 기존 음극 활물질인 흑연 대비 높은 용량 값(4200 mAh/g)을 갖고 있으나, 충전 및 방전 간 400%에 달하는 높은 부피 팽창/수축률이 배터리 수명에 악영향을 미치고 있다. 이를 해결하기 위해서 단일벽 탄소나노튜브를 소량 첨가해 수명 특성이 향상되는 결과를 얻었는데, 이런 향상이 어떻게 가능한지 나노스케일에서 영상화한 연구 결과가 공개됐다. 우리 대학 신소재공학과 홍승범 교수 연구팀이 LG에너지솔루션과 협업해 배터리의 수명 특성 향상 메커니즘 영상화 결과를 국제학술지‘에이씨에스 에너지 레터스(ACS Energy Letters, Impact Factor: 22)’에 게재했다고 19일 밝혔다. (논문명: Spatially Uniform Lithiation Enabled by Single-Walled Carbon Nanotubes) 연구팀은 이전에는 실리콘 활물질이 충&midd
2023-09-19