연구

〈 오 일 권 교수〉
우리 대학 기계공학과 오일권(43) 교수 연구팀이 화학적 도핑된 그래핀을 이용해 고성능의 인공근육형 작동장치(actuator)를 개발했다.
이번에 개발된 인공근육 작동장치는 기존 기술보다 3배 이상의 굽힘 변형을 보이고, 5시간 이상 구동해도 성능을 유지할 수 있다.
이번 연구는 어드밴스드 머터리얼스(Advanced Materials) 12월 15일자 온라인 판에 게재됐다.
최근 플렉서블, 웨어러블 소자에 대한 연구가 활발해지며 인간과 기계 사이의 햅틱(촉각 효과) 기능을 위한 능동형 유연 작동기(soft actuator)가 핵심 부품으로 각광받고 있다.
특히 유연성이 떨어져 첨단 전자제품에 적용이 어려운 기존의 기계식 작동기를 대신해 인간의 근육을 모방한 전기에 반응하는 인공근육형 작동기가 관심을 받고 있다.
그러나 기존의 백금이나 금을 기반으로 제작한 인공근육형 작동기는 제작 기간이 일주일 가까이 소요되고 실용성이 떨어지는 한계를 갖는다.
연구팀은 문제 해결을 위해 그래핀과 화학물질, 전도성 고분자를 이용했다. 황과 질소를 그래핑에 도핑하고 전도성 고분자와 함께 섞어 부드럽고 전도성이 탁월한 유연 전극을 제작했다. 그리고 이를 바탕으로 고성능 인공근육형 작동기를 개발했다.
기존의 금속 기반 작동기가 일주일 이상의 제작 기간이 소요되는데 반해 연구팀이 개발한 그래핀-전도성 고분자 전극 적층 방식의 유연 작동기는 2시간 이내 제작할 수 있는 장점을 갖는다.
또한 황과 질소 등 화학물질을 도핑하는 작업으로 기존 그래핀에 비해 1.5~2배 이상 전기화학 성능이 향상됨을 삼전극 전기화학 테스트를 통해 확인했다.
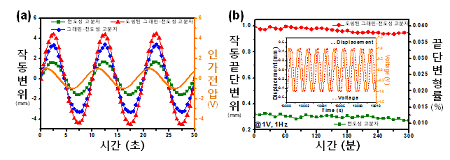
연구팀은 이번에 개발한 작동기는 0.5V와 1V의 낮은 인가전압에서도 대 변형 구동이 가능하고, 기존 대비 3배 이상의 변형을 보이면서도 장시간 성능 지속이 가능하다고 밝혔다.
이 원천기술은 향후 ▲소프트 로보틱스(soft robotics)▲3D 프린팅 된 작동기▲부드러운 햅틱 디바이스▲웨어러블 전자소자▲유연 디스플레이전자소자▲생체 의료기기 등 각광받는 차세대 기전소자로 응용될 것으로 기대된다.
오 교수는 “고성능 인공근육형 작동기 기술은 향후 첨단 기전소자의 핵심 요소가 될 것이다”며 “특히 3D프린팅 기술과 함께 발전하면 차세대 웨어러블 소자로 상용화 가능성이 높을 것이다”고 말했다.
이번 연구는 미래창조과학부 리더연구자지원사업의 지원을 받아 KAIST 김재환 박사과정, Kotal 박사가 공동 1저자로 참여했고, 네바다 주립대학 라스베가스(UNLV) 기계공학과 김광진 교수팀과의 공동연구를 통해 진행됐다.
□ 그림 설명
그림1. 도핑된 그래핀 기반 인공근육형 작동기의 단면 이미지
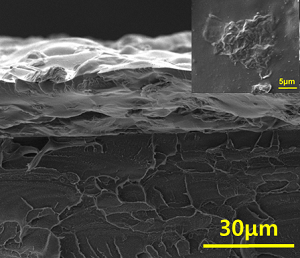
그림2. 인공근육형 작동기 구동 사진
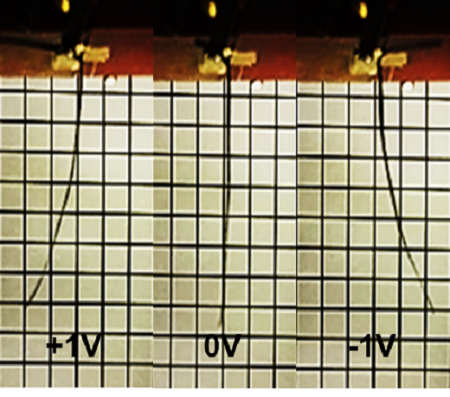
그림3. 황과 질소가 동시에 도핑된 그래핀의 원소 매핑 이미지
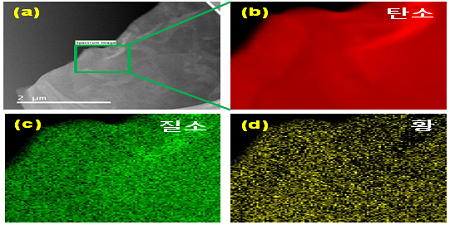
그림4. (a) 도핑된 그래핀의 굽힘 성능 및 (b) 성능 지속성 평가
-
연구 김희탁 김상욱 교수, 멤브레인 필요 없는 새로운 물 기반 전지 개발
우리 대학 생명화학공학과 김희탁 교수와 신소재공학과 김상욱 교수 공동 연구팀이 전기화학 소자의 핵심 부품인 멤브레인을 사용하지 않고도 에너지 효율 80% 이상을 유지하면서 1천 번 이상 구동되는 새로운 개념의 물 기반 아연-브롬 전지를 개발했다. 이번 연구를 통해 일본, 미국의 수입에 의존해 온 다공성 분리막이나 불소계 이온교환막을 사용하지 않는 기술로, 해당 기술에 대한 대외 의존도를 낮출 수 있을 것으로 기대된다. 이주혁 박사과정과 변예린 박사후연구원이 공동 1 저자로 참여한 이번 연구는 국제 학술지 ‘어드밴스드 머티리얼즈(Advanced materials)’12월 27일자 표지논문에 선정됐다.(논문명: High-Energy Efficiency Membraneless Flowless Zn-Br Battery: Utilizing the Electrochemical-Chemical growth of Polybromides) 최근 태양광, 풍력 등 신재
2020-01-08 -
연구 김상욱 교수, 홍합접착제 이용해 성능 높인 그래핀 섬유 개발
〈 김인호 박사과정, 김상욱 교수〉 우리 대학 신소재공학과 김상욱 교수 연구팀이 흑연계 그래핀을 이용해 우수한 물성을 갖는 신개념의 탄소섬유를 개발했다. 연구팀이 개발한 탄소섬유는 홍합접착제로 잘 알려진 폴리도파민(poly-dopamine)을 이용해 그래핀 층간 접착력을 높여 고강도, 고전도도를 갖는다. 이 신소재는 직물형태의 다양한 웨어러블 장치용 원천소재로 활용 가능할 것으로 기대된다. 김인호 박사과정이 1저자로 참여한 이번 연구는 재료과학분야 국제 학술지 ‘어드밴스드 머티리얼즈(Advanced Materials)’ 10월 4일자 표지논문으로 선정됐다. (논문명 : Mussel-Inspired Defect Engineering of Graphene Liquid Crystalline Fibers for Synergistic Enhancement of Mechanical Strength and Electrical Conductivity, 홍합
2018-10-17 -
연구 오일권 교수, 그래핀 기반의 소프트 액추에이터 개발
〈 타바시안 라솔 박사과정, 오 일 권 교수 〉 우리 대학 기계공학과 오일권 교수 연구팀이 두 개의 서로 상반된 그래핀 구조체를 전극으로 사용해 소프트 액추에이터(작동장치)의 성능을 높이는데 성공하였다. 연구팀이 이번 연구를 통해 제작한 액추에이터는 웨어러블 전자기기, 소프트 로봇 등의 분야에서 사용 가능할 것으로 기대된다. 타바시안 라솔(Tabassian Rassoul) 박사과정이 1저자로 참여한 이번 연구는 온라인 국제 학술지 ‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 1월 31일자에 게재됐으며 표지논문에 선정됐다. 차세대 전자기기에 능동형 소프트 액추에이터를 적용하기 위해서는 액추에이터의 전극이 유연성, 높은 전기 전도성 및 전기 화학적 활성, 내구성 등을 갖는 동시에 높은 효율성을 가져야 한다. 하지만 기존의 소프트 액추에이터는 백금 또는 금 등의 고가 귀금속이 사용됐기 때문에 실제 적용이 어려웠다
2018-02-07 -
연구 김상욱 교수, 카메라 플래시로 7나노미터 반도체 패턴 제작 기술 개발
〈 김상욱 교수, 진형민 연구원 〉 우리 대학 신소재공학과 김상욱 교수 연구팀이 카메라의 플래시를 이용해 반도체를 제작하는 기술을 개발했다. 이 기술은 반도체용 7나노미터 패턴 기법으로 한 번의 플래시를 조사하는 것만으로 대면적에서 초미세 패턴을 제작할 수 있다. 향후 고효율, 고집적 반도체 소자 제작 등에 활용 가능할 것으로 기대된다. 진형민 연구원, 박대용 박사과정이 공동 1저자로 참여한 이번 연구 결과는 국제 학술지 ‘어드밴스드 머티리얼즈(Advanced Materials)’ 8월 21일자 온라인 판에 게재됐다. 4차 산업혁명의 주요 요소인 인공지능, 사물인터넷, 빅데이터 등의 기술에는 고용량, 고성능 반도체 소자가 핵심적으로 필요하다. 이러한 차세대 고집적 반도체 소자를 만들기 위해서는 패턴을 매우 작게 형성하는 리소그래피(Lithography) 기술의 개발이 필수적이다. 현재 관련 업계에서는 작은 패턴 제작에 주로 광 리소그래피(Photol
2017-09-13 -
연구 최인성 교수, 농산물 장기보존 가능한 나노코팅기술 개발
〈 최 인 성 교수 〉 우리 대학 화학과 최인성 교수 연구팀이 친환경 나노코팅 기법을 이용해 과일의 부패 기간을 늦출 수 있는 기술을 개발했다. 이 기술은 식물 기반의 폴리페놀 물질을 이용해 코팅 시료의 종류에 관계없이 사용할 수 있는 범용 스프레이 나노코팅기술이다. 이번 연구결과는 국제학술지 ‘사이언티픽 리포트(Scientific Reports)’ 8월 1일자 온라인 판에 게재됐다. 폴리페놀 물질은 다량의 수산기(-OH)를 갖는 식물의 광합성 대사산물 중 하나로 뛰어난 항산화 작용을 수행하는 식물 기반의 천연물질이다. 잠재적 항암효과와 높은 항균성을 가져 식품 첨가물 등에 사용되고 있다. 폴리페놀은 철 이온과 화학적으로 강하게 결합해 복합체를 형성한다는 특성도 갖는다. 연구팀은 폴리페놀-철이온 복합체의 형성반응과 분사 기술을 접목해 나노코팅기술을 개발했다. 이 스프레이 코팅 기술은 코팅물질을 코팅용액에 담가 코팅하는 침지법에 비해 코팅 시간이 짧
2017-08-10