행사

< 김진환 교수 >
KAIST가 개발한 무인선박이 처음열린 국제대회에서 2위에 올랐다.
우리 학교 해양시스템공학전공 김진환 교수팀은 지난 10월 20~26일 싱가포르 마리나 베이(Marina Bay)에서 개최된 ‘제1회 국제 무인선박 경진대회’에서 미국 MIT에 이어 준우승을 차지했다.
무인자동차, 무인항공기와 더불어 해양 분야에서도 무인선박의 필요성이 점점 높아짐에 따라 이 분야 기술을 점검하고 육성하기 위해 미국 해군 연구개발국(ONR, Official of Naval Research)은 자율무인선 경진대회를 2년마다 개최하기로 했으며 올해 처음으로 열렸다.
한국, 미국, 호주, 일본, 싱가포르 등 환태평양 5개국에서 자국 내 선발을 거쳐 나라 별로 3개 팀씩 총 15개 팀이 참가한 본선에서는 MIT, 동경대, 동경공대, 싱가포르국립대, 난양공대, 호주 퀸즈랜드 공대 등 각국을 대표하는 학교들이 대거 출전했다. 우리나라에서는 KAIST외에도 서울대와 울산대가 참가했다.
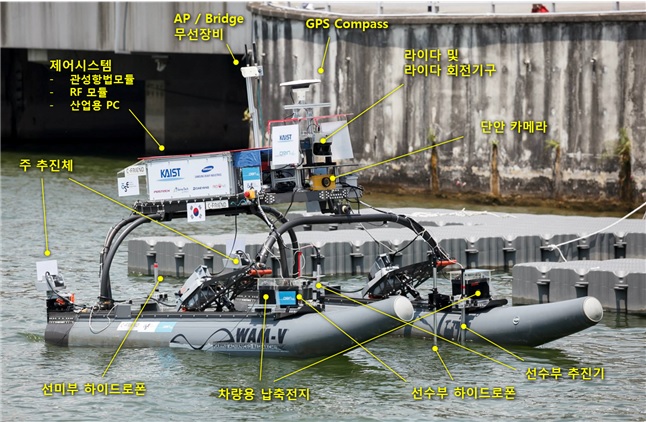
이번 대회는 주최 측에서 제공한 길이 4.5m, 폭 2.5m의 무인선 플랫폼을 가지고 추진 시스템, 하드웨어, 자율 알고리즘 소프트웨어의 통합 시스템을 팀별로 구현해 △항로인식운항 △수중음원탐색 △부두자동접안 △부표원격관측 △수상장애물 인식 및 회피 등 총 5개 과제를 사용자의 조작 없이 자율적으로 수행하는 방식으로 진행됐다.
KAIST는 전체 15개 팀 가운데 6개 팀만을 뽑는 최종 결선진출자 결정전에서 홈팀인 싱가포르국립대에 이어 2위를 차지하며 3위의 MIT에 앞서 결승에 진출했으나 마지막 날 열린 결승에서 MIT에 우승을 내주며 준우승을 차지했다.
KAIST팀은 2등상 외에도 베스트 웹사이트 상과 후원사인 미국 방산 업체인 노스럽그루먼(Northrop Grumman)사의 특별상까지 총 1만 6천 5백불의 상금을 수상했다.
박승빈 대외부총장은 “세계적 수준에 올라와있는 우리나라의 무인로봇기술을 전 세계에 알리는 계기가 됐다”며 “세계적인 대회에서 좋은 성적을 거둬 글로벌 명문 연구중심대학으로 발돋움하고 있는 KAIST의 국제적 인지도와 위상을 드높였다”고 수상 의의를 밝혔다.
김진환 교수는 “최근 들어 무인기나 무인자동차와 함께 해양 분야에서도 무인선박, 무인잠수정과 같은 무인 시스템기술의 필요성이 높아지고 있다”며 “무인선 기술을 이용하면 앞으로 수로조사, 해양탐사, 영해 감시 및 정찰, 불법어업단속 등을 보다 효과적이고 안전하게 수행하는데 커다란 도움이 될 것”이라고 말했다.
한편, 김 교수는 이번 대회 후원기관인 미해군연구개발국의 지원 외에도 삼성중공업, 소나테크, 대양전기공업, 레드원테크놀러지 등 국내 기업 후원을 받아 참가했다.
대회 공식 사이트 : www.robotx.org
KAIST팀 홈페이지 robotxangrynerds.blogspot.com
▣ KAIST팀 무인선
▣ 대회장면

▣ 미션
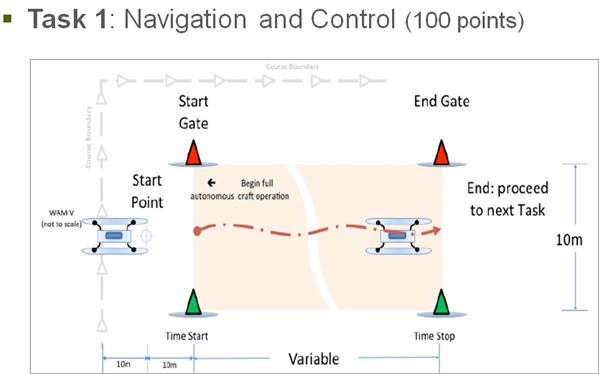
미션의 주요 목표: 부표를 경계로 한 항로를 인식하여 자율 운항을 통해 출구를 통과
미션 특징: 반드시 통과해야만 다음 임무 수행 가능.
미션 전략:
1. 라이다를 이용하여 입구 부표 및 출구 부표를 탐지하고 그 위치를 결정
2. 결정된 부표들의 위치를 기반으로 일련의 경유점들을 생성하고 이들을 추종함으로써 자율 운항 임무 수행.
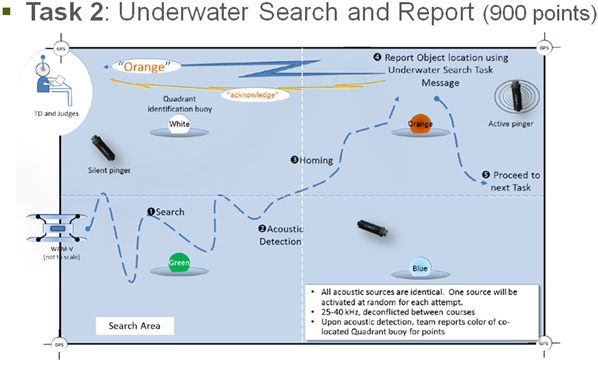
미션의 주요 목표: 수중음원의 3차원 위치(x,y,z)를 탐색하여 심판에게 보고함.
미션 특징:
1. 가장 큰 배점이 할당됨.
2. 4개의 음원 중, 임의의 한 음원만 음파를 송신
3. 심판에게 보고된 음원의 추정위치가 실제 위치와 가까울수록 높은 점수를 획득
미션 전략:
1. 예상되는 수중 음원의 위치 근방으로 이동 후, 정지
2. 일정시간동안 청음 후, 추정된 음원의 위치로 다시 이동하여 청음 및 측위 과정을 반복함으로써 추정오류를 최소화 함.
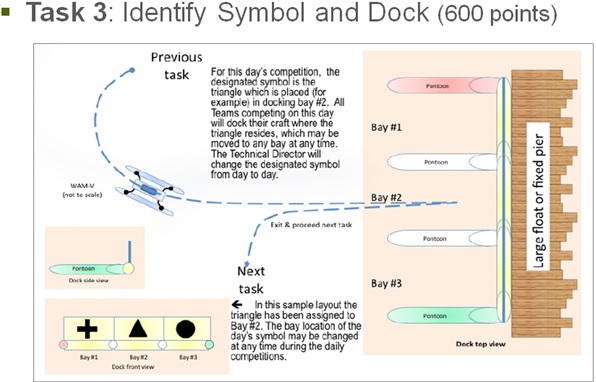
미션의 주요 목표: 각 부두에 할당된 표식을 탐지하고, 목표 부두에 접안
미션 특징: 세 가지 다른 표식(십자가, 삼각형, 원)들을 서로 구분하고, 매일 다르게 공지되는 표식의 위치에 해당하는 부두에 정확히 접안해야 함.
미션 전략:
1. 세 가지 표식이 모두 보이는 위치로 이동 후, 영상처리 알고리즘을 통해 목표 표식을 탐지.
2. 추적 알고리즘의 적용을 통해 연속적인 표식의 위치 추정
3. 주 추진기 및 선수부 추진기를 이용한 횡방향 이동을 통해 목표 부두로 정확히 접안
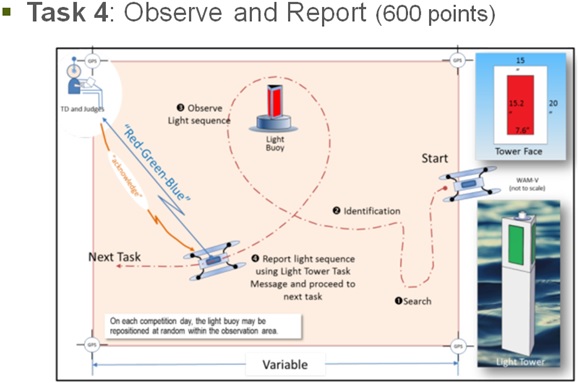
미션의 주요 목표: 임의의 위치에 있는 발광 부유체를 인식하고 부유체가 발하는 색상의 순서를 인식하여 보고함.
미션 특징: 부유체에서는 세 가지 색상(빨강, 초록, 파랑)이 임의의 순서로 발광됨. 무인선이 발광 부유체에 충돌하였을 때, 해당 시도는 실격처리 됨.
미션 전략:
1. 라이다를 기반으로 임의의 위치에 있는 발광 부유체를 찾기 위해 사전 정의된 일련의 경유점을 따라 이동하며 그 위치를 탐색한다.
2. 발광 부유체의 위치 결정 후, 반경 10m의 위치에서 선수각/거리/위치 제어를 수행
3. 영상처리를 통한 색상 인식 및 발광 순서인식 알고리즘 적용
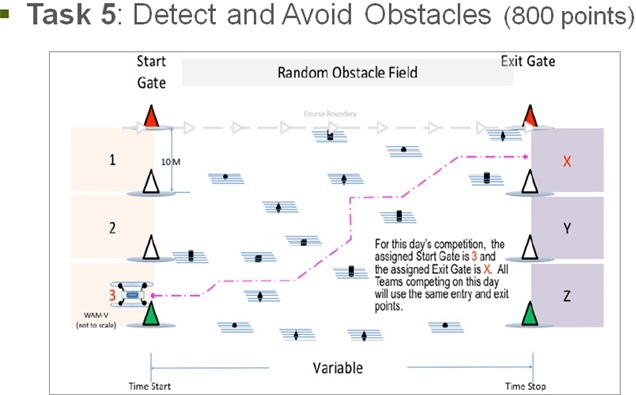
미션의 주요 목표: 지정된 입구로 진입 후 임의의 위치에 있는 장애물을 회피하여 지정된 출구를 통과
미션 특징: 입구, 출구 각각 3개의 구역 중, 매일 다르게 지정된 입구와 출구를 통과하여야 함. 무인선이 장애물과 충돌한 횟수에 따라 감점이 적용됨.
미션 전략:
1. 적절한 탐지 위치에서, 라이다를 이용하여 입구를 구성하는 부표를 탐지하고 그 위치를 결정
2. 결정된 부표들의 위치들을 기반으로 진입을 위한 경유점 생성
3. 라이다를 기반으로 장애물을 인식하고 인식 정보를 이용하여 경로계획 및 회피 알고리즘 적용
4. 입구 진입과 동일한 방법으로 출구 인식 및 통과
-
인물 오현우, 정선우 새내기과정학부생, 2024 메타버스 개발자 경진대회 최우수상 수상
셈틀 팀은 최근 과학기술정보통신부가 주최한 ‘2024년 메타버스 개발자 경진대회’에서 성인부 최우수상을 수상했다고 밝혔다. 셈틀 팀은 팀장 오현우(KAIST 새내기과정학부), 팀원 김광엽(대전동신과학고등학교 3), 양우림(대전동신과학고등학교 3), 지환(대전동신과학고등학교 3), 정선우(KAIST 새내기과정학부) 으로 구성되어 있다. 이 팀은 팀장을 포함하여 4인이 미성년자로 구성되어 있어, 학생부가 아닌 성인부에서 최우수상을 수상한 점이 눈길을 끈다. 팀원 정선우를 제외한 모두가 만 18세로서 미성년자이지만 팀장 오현우 학생이 KAIST 새내기과정학부에 재학 중이기에 성인부에 참가했다. 이들은 ‘셈틀 스페이스(Semtle Space)’라는 프로젝트를 출품해 수상의 영예를 안았다. 시상식은 10월 18일 양재 aT 센터에서 열렸고, 이날 상장과 함께 1,000만 원의 상금을 받았다. 수상 프로젝트인 ‘셈틀 스페이스&
2024-10-22 -
인물 Team KAIST, 국제 해양로봇 경진대회 준우승
우리 대학 기계공학과 김진환 교수, 전기및전자공학부 심현철 교수 연구실 학생들을 주축으로 하고 파블로 항공이 협력기업으로 참여한 Team KAIST가 국제로봇경진대회인 MBZIRC 마리타임 그랜드 챌린지(MBZIRC Maritime Grand Challenge)에서 최종 준우승을 차지하고 총상금 65만 불(8.6억 원)을 획득했다고 8일 전했다. 해양로봇 경진대회로는 역대 가장 큰 규모를 자랑하는 본 대회는 아랍에미리트 정부가 후원하고 아부다비 과학성 산하 기관인 아스파이어(ASPIRE)가 주관하는 총상금 3백만 불 규모다. 21년 말부터 시작된 대회에는 최초 전 세계에서 52개 팀이 참가하였으며 1단계와 2단계 심사를 거쳐 23년 2월에 최종결선 팀 5개 팀이 선정되었다. 최종결선은 2024년 1월 10일부터 2월 6일까지 아랍에미리트 수도인 아부다비 연안 10제곱 킬로미터 해역을 통제한 상태에서 실제 무인선과 무인기를 활용하여 진행되었으며 김진환 교수와 심현철 교수 외
2024-02-13 -
행사 제3회 K-인공지능 제조데이터 분석 경진대회 성료
우리 대학 제조AI빅데이터센터가 중소 제조기업의 애로사항을 창의적인 인공지능(AI) 아이디어로 해결하는 '제3회 K-인공지능 제조데이터 분석 경진대회' 시상식을 지난달 28일 서울 양재동 aT센터에서 개최했다. 중소벤처기업부(장관 이영, 이하 중기부), 스마트제조혁신추진단(단장 안광현, 이하 추진단)과 공동 주최한 이번 경진대회는 우수한 제조 인공지능 분석 인재를 발굴 및 육성하기 위해 올해 세 번째로 개최됐다.제조데이터 인공지능 분석에 관심 있는 19세 이상의 국민을 대상으로 지난 9월 말부터 참가자를 모집한 결과 3인 이내로 자유롭게 구성된 184개 팀, 389명이 신청을 완료했다. 각 팀은 10월 23일 KAMP*의 열처리 품질보증 제조AI데이터셋**을 활용해 뿌리기업 현장 개선 아이디어를 제시하고 알고리즘으로 구현하는 과제를 부여받아 본격적인 대회 일정에 돌입했다. ☞ KAMP: 인공지능(AI) 중소벤처 제조 플랫폼(Korea AI Manufacturin
2023-12-04 -
행사 기후 위기에 대응하는 KAIST의 기발한 생각, 학생 메이커톤 대회 성료
우리 대학은 기후 위기로 인한 의식주의 변화에 대응하는 혁신 아이디어를 실제 제품으로 만들어 내는 제작 경진대회를 지난 5일부터 열흘간 개최했다. 창업원이 주최한 '2023 KAIST 메이커톤'은 창의적인 아이디어를 시제품으로 제작해 혁신적인 제품 개발을 촉진하고 예비 제조 창업자를 발굴하기 위해 개최됐다. 메이커톤(Make A Thon)은 '만들다(make)'와 '마라톤(marathon)'의 합성어로 주어진 시간 안에 제시된 주제에 대한 문제를 정의하고 이를 해결할 수 있는 창의적인 아이디어를 시제품으로 제작하는 대회를 말한다. 우리 대학 재학생을 대상으로 진행된 이번 대회는 제안서 평가를 거친 8개 팀이 본선에 올랐다. 참가팀은 아이디어 기획법 실습 및 3D 프린팅, 레이저 커터, CNC 밀링* 등 디지털 제작 장비와 공작 장비의 사용 교육을 이수했다. * CNC 밀링: 컴퓨터 수치 제어(Computerized Numerical Control) 바탕의 절삭기 대회를 총괄
2023-07-17 -
인물 주진현 교수 연구팀, ASCE EMI 2023 학술대회 논문경진대회 1위
우리 대학 건설및환경공학과 주진현 교수 연구실의 자오이동(Yidong Zhao) 박사과정 학생이 미국토목학회(ASCE) 공학역학협회(EMI) 2023 학술대회의 학생 논문 경진대회 다공역학(Poromechanics) 분야에서 1위에 올랐다. 6월 6일부터 6월 9일까지 미국 조지아 공과대학교(Georgia Tech)에서 개최된 이번 ASCE EMI 학술대회는 매년 약 1,000여 명이 참여하는 공학 역학 분야의 가장 권위 있는 국제학술대회 중 하나다. 공학역학의 분야별로 개최되는 학생논문 경진대회는 제출된 사전 논문 심사를 통해 결선 후보 5명을 선정한 뒤 학술대회 중 발표심사를 통해 최종 수상자를 선정한다.건설및환경공학과 지반역학연구실(지도교수 주진현)의 자오이동 박사과정 학생은 '재료점법의 체적 잠금 해결을 위한 새로운 추정변형구배법(A New Assumed Deformation Gradient Approach to Circumvent Volumetric Locking
2023-07-06