-
 지방간 치료제 개발에 최적화된 동물모델 개발
대사이상 지방간 질환은 전 세계 인구의 30%, 비만하지 않은 인구의 19%가 앓고 있으며, 지방간에서 시작해 간암까지 진행되는 심각한 만성질환이다. 현재 FDA에서 승인된 치료제인 레스메티롬(Resmetirom)이 있지만, 치료받은 환자의 70% 이상에서 충분한 효과를 보지 못해 새로운 치료제 개발이 시급하다. 한국 연구진이 지방간염 치료제 개발에 중요한 전환점이 될 사람의 대사이상 지방간 질환을 잘 모사하는 새로운 동물모델을 개발해 주목받고 있다.
우리 대학 의과학대학원 김하일 교수 연구팀과 연세대학교 의과대학 박준용 교수 연구팀, 한미약품 R&D센터(최인영 R&D센터장/전무이사) 및 ㈜제이디바이오사이언스(대표 안진희)와 공동연구를 통해 새로운 대사이상 지방간 질환 동물모델을 개발했다고 19일 밝혔다.
대사이상 지방간 질환의 유병률은 20~30%에 이르고, 지방간염 질환은 전 세계 성인 인구의 5% 이상이 보유하고 있을 정도로 높은 유병률을 보임에도 불구하고 현재까지 제품화된 치료제가 전혀 없다.
대사이상 지방간 질환은 지방간에서 시작해 지방간염, 섬유화, 간경화, 간암으로 진행되는 만성질환이며, 심혈관질환 및 간 관련 합병증 등에 의해 사망률이 증가하므로 발병 초기에 적절한 치료가 필요하다.
하지만 아직까지 사람의 질환을 모사할 수 있는 적절한 동물모델이 없어 병인 기전의 규명과 치료제의 개발에 어려움이 있다. 특히 기존의 동물모델들은 당뇨와 비만과 같은 대사이상이 간경화와 간암의 발병에 유발하는지를 반영하지 못한다는 문제점이 있었다.
김하일 교수 연구팀은 베타세포의 기능이 부족한 아시아인에서 비만과 당뇨병을 동반한 대사이상 지방간 질환의 유병률이 더 높다는 점에 착안했다. 마우스에 약물을 통해 베타세포를 파괴해 당뇨를 유발한 다음 고지방식이를 먹여서 비만과 당뇨를 동반한 지방간 질환이 빠르게 진행하는 동물모델을 개발했다.
이 마우스 모델은 1년 동안 점진적으로 지방간, 지방간염, 간 *섬유화 및 간암이 나타나는데, 해당 마우스의 간의 유전체를 분석한 결과 그 특징이 비만과 제2형 당뇨병을 동반한 대사이상 지방간 질환 환자들과 매우 유사한 것으로 나타났다. 특히 이 모델에서 발생하는 간암은 대사이상 지방간 질환 환자에서 발생하는 간암과 조직학적, 분자생물학적 특성이 유사한 것을 연구팀은 확인했다.
* 섬유화: 간의 일부가 굳는 현상으로, 지방간염 개선의 주요 지표로 쓰임
연구팀은 개발한 동물모델을 사용해, 최근 비만치료효과로 각광을 받고 있는 GLP-1 유사체의 효과를 시험했다. GLP-1 유사체의 투여가 이 마우스 모델에서 지방간, 간염과 간 섬유화의 진행을 억제하는 효과를 확인해, 마우스 모델이 신약 개발을 위한 전임상 모델로 유용하게 활용될 수 있음을 연구팀은 보였다. 또한 GLP-1 유사체의 투여가 간암의 발생을 억제함을 최초로 규명해, 대사이상 지방간 질환의 주요 사망 요인인 간암의 발병 억제를 위한 GLP-1 유사체의 활용 방안을 제시했다.
의과학대학원 김하일 교수는 “현재 대사이상 지방간 질환 동물모델은 대사이상 지방간 질환의 넓은 스펙트럼과 당뇨, 비만과 같은 대사질환을 잘 반영하지 못하는 문제점이 있으나, 우리 연구팀이 개발한 마우스 모델은 만성 대사질환의 특징을 잘 모사해, 대사이상 지방간 질환 동물모델로서 관련 연구에 중요한 전환점을 제시할 수 있을 것이다”고 강조했다.
우리 대학 의과학대학원 정병관 박사, 최원일 교수, 화순전남대학교병원 최원석 교수가 공동 제1 저자로 참여한 이번 연구 논문은 국제 학술지인 ‘네이처 커뮤니케이션즈(Nature Communications)’ 에 2024년 8월 2일 게재됐다.
(논문명: A male mouse model for metabolic dysfunction-associated steatotic liver disease and hepatocellular carcinoma)
한편 이번 연구는 과학기술정보통신부, 보건복지부, 교육부, 및 ㈜제이디바이오사이언스(JD Bioscience Inc.)에서 지원을 받아 수행됐다.
지방간 치료제 개발에 최적화된 동물모델 개발
대사이상 지방간 질환은 전 세계 인구의 30%, 비만하지 않은 인구의 19%가 앓고 있으며, 지방간에서 시작해 간암까지 진행되는 심각한 만성질환이다. 현재 FDA에서 승인된 치료제인 레스메티롬(Resmetirom)이 있지만, 치료받은 환자의 70% 이상에서 충분한 효과를 보지 못해 새로운 치료제 개발이 시급하다. 한국 연구진이 지방간염 치료제 개발에 중요한 전환점이 될 사람의 대사이상 지방간 질환을 잘 모사하는 새로운 동물모델을 개발해 주목받고 있다.
우리 대학 의과학대학원 김하일 교수 연구팀과 연세대학교 의과대학 박준용 교수 연구팀, 한미약품 R&D센터(최인영 R&D센터장/전무이사) 및 ㈜제이디바이오사이언스(대표 안진희)와 공동연구를 통해 새로운 대사이상 지방간 질환 동물모델을 개발했다고 19일 밝혔다.
대사이상 지방간 질환의 유병률은 20~30%에 이르고, 지방간염 질환은 전 세계 성인 인구의 5% 이상이 보유하고 있을 정도로 높은 유병률을 보임에도 불구하고 현재까지 제품화된 치료제가 전혀 없다.
대사이상 지방간 질환은 지방간에서 시작해 지방간염, 섬유화, 간경화, 간암으로 진행되는 만성질환이며, 심혈관질환 및 간 관련 합병증 등에 의해 사망률이 증가하므로 발병 초기에 적절한 치료가 필요하다.
하지만 아직까지 사람의 질환을 모사할 수 있는 적절한 동물모델이 없어 병인 기전의 규명과 치료제의 개발에 어려움이 있다. 특히 기존의 동물모델들은 당뇨와 비만과 같은 대사이상이 간경화와 간암의 발병에 유발하는지를 반영하지 못한다는 문제점이 있었다.
김하일 교수 연구팀은 베타세포의 기능이 부족한 아시아인에서 비만과 당뇨병을 동반한 대사이상 지방간 질환의 유병률이 더 높다는 점에 착안했다. 마우스에 약물을 통해 베타세포를 파괴해 당뇨를 유발한 다음 고지방식이를 먹여서 비만과 당뇨를 동반한 지방간 질환이 빠르게 진행하는 동물모델을 개발했다.
이 마우스 모델은 1년 동안 점진적으로 지방간, 지방간염, 간 *섬유화 및 간암이 나타나는데, 해당 마우스의 간의 유전체를 분석한 결과 그 특징이 비만과 제2형 당뇨병을 동반한 대사이상 지방간 질환 환자들과 매우 유사한 것으로 나타났다. 특히 이 모델에서 발생하는 간암은 대사이상 지방간 질환 환자에서 발생하는 간암과 조직학적, 분자생물학적 특성이 유사한 것을 연구팀은 확인했다.
* 섬유화: 간의 일부가 굳는 현상으로, 지방간염 개선의 주요 지표로 쓰임
연구팀은 개발한 동물모델을 사용해, 최근 비만치료효과로 각광을 받고 있는 GLP-1 유사체의 효과를 시험했다. GLP-1 유사체의 투여가 이 마우스 모델에서 지방간, 간염과 간 섬유화의 진행을 억제하는 효과를 확인해, 마우스 모델이 신약 개발을 위한 전임상 모델로 유용하게 활용될 수 있음을 연구팀은 보였다. 또한 GLP-1 유사체의 투여가 간암의 발생을 억제함을 최초로 규명해, 대사이상 지방간 질환의 주요 사망 요인인 간암의 발병 억제를 위한 GLP-1 유사체의 활용 방안을 제시했다.
의과학대학원 김하일 교수는 “현재 대사이상 지방간 질환 동물모델은 대사이상 지방간 질환의 넓은 스펙트럼과 당뇨, 비만과 같은 대사질환을 잘 반영하지 못하는 문제점이 있으나, 우리 연구팀이 개발한 마우스 모델은 만성 대사질환의 특징을 잘 모사해, 대사이상 지방간 질환 동물모델로서 관련 연구에 중요한 전환점을 제시할 수 있을 것이다”고 강조했다.
우리 대학 의과학대학원 정병관 박사, 최원일 교수, 화순전남대학교병원 최원석 교수가 공동 제1 저자로 참여한 이번 연구 논문은 국제 학술지인 ‘네이처 커뮤니케이션즈(Nature Communications)’ 에 2024년 8월 2일 게재됐다.
(논문명: A male mouse model for metabolic dysfunction-associated steatotic liver disease and hepatocellular carcinoma)
한편 이번 연구는 과학기술정보통신부, 보건복지부, 교육부, 및 ㈜제이디바이오사이언스(JD Bioscience Inc.)에서 지원을 받아 수행됐다.
2024.08.19
조회수 5775
-
 피부 모니터링부터 뇌심부 해석까지 쉽게 가능
실시간으로 심박수를 측정할 수 있는 스마트 워치, 심장 박동수를 조절하는 페이스메이커 등 생체신호를 지속적으로 측정해 다양한 병을 진단하거나 치료할 수 있는 전자소자인 생체전자소자에 관한 연구가 활발히 진행되고 있다. KAIST 연구진이 생체조직 접촉 시 손상을 최소화하고 3D 마이크로니들 구조로 조직표면부터 심부까지 측정할 수 있는 전도성 하이드로젤 소재를 개발해 화제다.
우리 대학 신소재공학과 스티브 박 교수, 바이오및뇌공학과 박성준 교수 공동연구팀이 3D 프린팅을 통해 다양한 형태의 생체전자소자를 쉽고 빠르게 제작할 수 있는 전도성 고분자 기반 전극 물질을 개발했다고 7일 밝혔다.
이번 연구를 통해 기존 2D 전극 패터닝 기술로 접근하기 어려웠던 한계점을 극복해, 원하는 위치 및 심부 영역의 뇌 신경세포를 자극 및 측정할 수 있어, 뇌의 심부 영역에서 뇌의 활성화 원리를 정확하게 해석할 수 있을 것으로 기대된다. 또한 3D 프린팅을 통해 이 기술은 피부에 부착하는 헬스케어 모니터링 소자부터 생체 삽입형 소자에 이르기까지 광범위하게 활용할 수 있을 것으로 기대된다.
기존 생체전자소자에 사용됐던 금속 물질은 단단한 물성으로 인해 연약한 생체조직에 상처를 입힐 수 있다는 문제점이 있었다. 또한, 이 문제를 보완하기 위해 개발됐던 전도성 하이드로젤 소재는 낮은 전기전도성을 가지고, 생체적합성을 개선하기 위해 소자 제작 후 24시간 이상의 독성 제거 공정을 진행해야 한다는 문제점이 있었다. 또한, 2D 구조의 전극 패터닝만 가능하다는 한계점 때문에 다양한 형태의 소자를 제작하기 어려웠다.
박 교수 연구팀은 전도성 고분자를 나노미터 크기의 콜로이드 형태로 가공해 유화 작용을 유도함으로써 잉크의 유변학적 특징*을 개선하고, 생체적합성에 악영향을 미치는 독성 물질을 원심분리 공정을 통해 제거함으로써 3D 프린팅이 가능하면서 후처리 공정이 필요 없는 고전도성 하이드로젤 잉크를 개발했다.
*유변학적 특성: 잉크의 유동성과 그에 따른 변형, 그 응답인 응력 등의 특성을 말하며 특성이 높을수록 잉크의 압출 직후 인쇄된 형태를 유지할 수 있으며, 낮으면 압출 직후 인쇄된 형태를 유지하기 어렵다.
이 재료는 선행연구 대비 약 1.5배(286 S/cm)의 전기전도도를 가지며, 고해상도 패터닝(~50μm), 전방위 3D 전극 패터닝이 가능하다는 장점을 가진다. 또한 생체조직과 비슷한 물성(영 계수 750kPa)를 가져, 생체조직과의 접촉 시 손상을 최소화할 수 있다.
연구팀은 개발한 신소재 전극을 기반으로 심전도 측정(ECG) 및 근전도 측정(EMG) 측정 타투, 뇌 피질전도도(ECoG) 측정소자, 3D 뇌 탐침 측정 소자를 개발해 기능성을 검증했다. 또한 높은 전하 저장 능력을 활용, 낮은 전압(60mV)으로 쥐의 좌골 신경을 자극하는 소자를 개발해 생체 자극 소자로서의 성능을 확인했다. 더불어 복잡한 3D 회로를 필요한 적용 분야에 맞추어 제작할 수 있고 3D 마이크로니들 구조로 전극을 패터닝해 조직 표면에 있는 생체신호뿐만 아니라 조직 심부에 있는 뉴럴 인터페이스의 제작이 가능해졌다.
연구를 주도한 스티브 박 교수는 "기존 3D 프린팅 기술을 이용해 제작되는 전자소자의 경우 전도성 및 생체적합성을 개선하기 위해 장시간 및 복잡한 형태의 후처리가 필요해 래피드 프로토타이핑(Rapid prototyping)을 장점으로 가져갈 수 있는 3D 프린팅 기술의 모든 장점을 이용할 수 없었다”며, “이번 연구에서는 이러한 단점을 해결해 향후 환자 맞춤형 바이오 전자소자 및 다양한 3D 회로 응용 분야에 활용될 수 있을 것으로 기대된다ˮ라고 말했다.
신소재공학과 오병국 박사과정과 백승혁 석사, 바이오및뇌공학과 남금석 석박사통합과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `네이처 커뮤니케이션즈(Nature Communications)'에 7월 11일 게재됐다. (논문명 : 3D printable and biocompatible PEDOT:PSS-ionic liquid colloids with high conductivity for rapid on-demand fabrication of 3D bioelectronics)
이번 연구는 한국연구재단 나노 및 소재기술개발사업, 중견 사업 및 ETRI의 지원을 받아 수행됐다.
피부 모니터링부터 뇌심부 해석까지 쉽게 가능
실시간으로 심박수를 측정할 수 있는 스마트 워치, 심장 박동수를 조절하는 페이스메이커 등 생체신호를 지속적으로 측정해 다양한 병을 진단하거나 치료할 수 있는 전자소자인 생체전자소자에 관한 연구가 활발히 진행되고 있다. KAIST 연구진이 생체조직 접촉 시 손상을 최소화하고 3D 마이크로니들 구조로 조직표면부터 심부까지 측정할 수 있는 전도성 하이드로젤 소재를 개발해 화제다.
우리 대학 신소재공학과 스티브 박 교수, 바이오및뇌공학과 박성준 교수 공동연구팀이 3D 프린팅을 통해 다양한 형태의 생체전자소자를 쉽고 빠르게 제작할 수 있는 전도성 고분자 기반 전극 물질을 개발했다고 7일 밝혔다.
이번 연구를 통해 기존 2D 전극 패터닝 기술로 접근하기 어려웠던 한계점을 극복해, 원하는 위치 및 심부 영역의 뇌 신경세포를 자극 및 측정할 수 있어, 뇌의 심부 영역에서 뇌의 활성화 원리를 정확하게 해석할 수 있을 것으로 기대된다. 또한 3D 프린팅을 통해 이 기술은 피부에 부착하는 헬스케어 모니터링 소자부터 생체 삽입형 소자에 이르기까지 광범위하게 활용할 수 있을 것으로 기대된다.
기존 생체전자소자에 사용됐던 금속 물질은 단단한 물성으로 인해 연약한 생체조직에 상처를 입힐 수 있다는 문제점이 있었다. 또한, 이 문제를 보완하기 위해 개발됐던 전도성 하이드로젤 소재는 낮은 전기전도성을 가지고, 생체적합성을 개선하기 위해 소자 제작 후 24시간 이상의 독성 제거 공정을 진행해야 한다는 문제점이 있었다. 또한, 2D 구조의 전극 패터닝만 가능하다는 한계점 때문에 다양한 형태의 소자를 제작하기 어려웠다.
박 교수 연구팀은 전도성 고분자를 나노미터 크기의 콜로이드 형태로 가공해 유화 작용을 유도함으로써 잉크의 유변학적 특징*을 개선하고, 생체적합성에 악영향을 미치는 독성 물질을 원심분리 공정을 통해 제거함으로써 3D 프린팅이 가능하면서 후처리 공정이 필요 없는 고전도성 하이드로젤 잉크를 개발했다.
*유변학적 특성: 잉크의 유동성과 그에 따른 변형, 그 응답인 응력 등의 특성을 말하며 특성이 높을수록 잉크의 압출 직후 인쇄된 형태를 유지할 수 있으며, 낮으면 압출 직후 인쇄된 형태를 유지하기 어렵다.
이 재료는 선행연구 대비 약 1.5배(286 S/cm)의 전기전도도를 가지며, 고해상도 패터닝(~50μm), 전방위 3D 전극 패터닝이 가능하다는 장점을 가진다. 또한 생체조직과 비슷한 물성(영 계수 750kPa)를 가져, 생체조직과의 접촉 시 손상을 최소화할 수 있다.
연구팀은 개발한 신소재 전극을 기반으로 심전도 측정(ECG) 및 근전도 측정(EMG) 측정 타투, 뇌 피질전도도(ECoG) 측정소자, 3D 뇌 탐침 측정 소자를 개발해 기능성을 검증했다. 또한 높은 전하 저장 능력을 활용, 낮은 전압(60mV)으로 쥐의 좌골 신경을 자극하는 소자를 개발해 생체 자극 소자로서의 성능을 확인했다. 더불어 복잡한 3D 회로를 필요한 적용 분야에 맞추어 제작할 수 있고 3D 마이크로니들 구조로 전극을 패터닝해 조직 표면에 있는 생체신호뿐만 아니라 조직 심부에 있는 뉴럴 인터페이스의 제작이 가능해졌다.
연구를 주도한 스티브 박 교수는 "기존 3D 프린팅 기술을 이용해 제작되는 전자소자의 경우 전도성 및 생체적합성을 개선하기 위해 장시간 및 복잡한 형태의 후처리가 필요해 래피드 프로토타이핑(Rapid prototyping)을 장점으로 가져갈 수 있는 3D 프린팅 기술의 모든 장점을 이용할 수 없었다”며, “이번 연구에서는 이러한 단점을 해결해 향후 환자 맞춤형 바이오 전자소자 및 다양한 3D 회로 응용 분야에 활용될 수 있을 것으로 기대된다ˮ라고 말했다.
신소재공학과 오병국 박사과정과 백승혁 석사, 바이오및뇌공학과 남금석 석박사통합과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `네이처 커뮤니케이션즈(Nature Communications)'에 7월 11일 게재됐다. (논문명 : 3D printable and biocompatible PEDOT:PSS-ionic liquid colloids with high conductivity for rapid on-demand fabrication of 3D bioelectronics)
이번 연구는 한국연구재단 나노 및 소재기술개발사업, 중견 사업 및 ETRI의 지원을 받아 수행됐다.
2024.08.07
조회수 6905
-
 틈새로 빠져나가는 소음까지 잡는다
소리는 작은 구멍이나 틈새만으로도 잘 빠져나가는 특징이 있다. 이러한 틈새를 통해 빠져나오는 소리는 보다 넓은 공간까지 잘 전파되며, 틈새를 전혀 막지 않으면서 외부 소리가 안에서 들리지 않게 하거나 내부 소리가 바깥에서 들리지 않도록 하는 것은 음향학적으로도 매우 도전적인 문제다.
우리 연구진이 다양한 산업 현장의 소음 문제 해결에 새로운 솔루션이 될 뿐 아니라 최근 가속화되고 있는 미래 기술인 항공 택시, 드론과 같은 도심 항공 모빌리티 등에서 발생하는 소음을 효과적으로 저감할 수 있는 획기적 기술을 개발했다.
우리 대학 기계공학과 전원주 교수 연구팀이 구조물의 틈새나 개구부를 통한 열 교환과 공기의 흐름은 자유롭게 허용하면서도 소음은 효과적으로 차단하기 위해, 음향 임피던스를 원하는 복소수 값으로 조절할 수 있는 신개념 음향 메타물질인 ‘복소 임피던스 타일’을 개발했다고 6일 밝혔다.
음향 임피던스란 소리가 전파되는 매질(예: 공기, 물)이 가진 고유의 음향학적 특성으로, 일반적으로 매질의 밀도와 음속의 곱셈으로 표현되기 때문에 그 값이 실수이며 매질이 정해지면 원하는 값으로 자유롭게 조절하는 것이 불가능하다.
하지만, 연구팀이 개발한 복소 임피던스 타일은 소리가 경계면에 부딪혀서 반사될 때 반사되는 소리의 크기뿐만 아니라 방향까지도 조절하는 것이 가능해지게 한다. 이는 구조물 벽면에서 소리를 흡수만 하는 기존 기술과는 달리, 소리의 크기와 방향을 적절하게 조절해 소리가 틈새로 거의 빠져나가지 않고 구조물 내에서 가둬진 채 줄어들도록 한다.
연구팀은 복소 임피던스 타일을 적용해 밖으로 빠져나가는 소리를 90% 이상 저감할 수 있음을 정밀한 전산 시뮬레이션을 통해 예측한 후, 제작과 실험을 통해 소음 저감 성능을 검증하는 데 성공했다. 심지어, 구조물 내벽에서 소리를 100% 완벽하게 흡수하는 경우보다도 복소 임피던스 타일을 사용했을 때 밖으로 빠져나가는 소리를 훨씬 더 큰 폭으로 저감할 수 있음을 확인했다.
전원주 교수는 “복소 임피던스 타일은 개구부나 틈새를 전혀 막지 않으면서도 소리는 밖으로 빠져나가지 못하게 할 수 있으며, 얇은 두께를 갖기 때문에 상대적으로 협소한 공간을 갖는 시스템에도 적용이 가능하다는 특징이 있다. 특히, 재료가 아닌 구조의 형상적인 특징을 이용하기 때문에 습도나 온도 변화에 따른 유지 보수가 쉬울뿐더러 제작도 용이하다는 장점을 가지고 있어 전자제품(헤어드라이기, 청소기 등)부터 향후 미래 교통수단으로 각광받는 도심 항공 모빌리티까지 다양한 시스템의 소음 저감에 새로운 솔루션으로 활용이 가능하다”고 말했다.
해당 연구 결과는 기계공학과 박사과정 양은진 학생과 김지완 학생이 공동 제1 저자로 참여했으며, 기계공학 분야의 국제 학술지인 `메카니컬 시스템 앤 시그널 프로세싱(Mechanical Systems and Signal Processing) (IF: 7.9, JCR 5/180(2.5%))'에 지난 3월 1일 게재됐다. (논문명: Complex-valued impedance tiles to reduce noise emanating through openings in mechanical systems)
한편, 이번 연구는 한국연구재단의 중견연구자지원사업과 KAIST 도약연구사업의 지원을 받아 수행됐다.
틈새로 빠져나가는 소음까지 잡는다
소리는 작은 구멍이나 틈새만으로도 잘 빠져나가는 특징이 있다. 이러한 틈새를 통해 빠져나오는 소리는 보다 넓은 공간까지 잘 전파되며, 틈새를 전혀 막지 않으면서 외부 소리가 안에서 들리지 않게 하거나 내부 소리가 바깥에서 들리지 않도록 하는 것은 음향학적으로도 매우 도전적인 문제다.
우리 연구진이 다양한 산업 현장의 소음 문제 해결에 새로운 솔루션이 될 뿐 아니라 최근 가속화되고 있는 미래 기술인 항공 택시, 드론과 같은 도심 항공 모빌리티 등에서 발생하는 소음을 효과적으로 저감할 수 있는 획기적 기술을 개발했다.
우리 대학 기계공학과 전원주 교수 연구팀이 구조물의 틈새나 개구부를 통한 열 교환과 공기의 흐름은 자유롭게 허용하면서도 소음은 효과적으로 차단하기 위해, 음향 임피던스를 원하는 복소수 값으로 조절할 수 있는 신개념 음향 메타물질인 ‘복소 임피던스 타일’을 개발했다고 6일 밝혔다.
음향 임피던스란 소리가 전파되는 매질(예: 공기, 물)이 가진 고유의 음향학적 특성으로, 일반적으로 매질의 밀도와 음속의 곱셈으로 표현되기 때문에 그 값이 실수이며 매질이 정해지면 원하는 값으로 자유롭게 조절하는 것이 불가능하다.
하지만, 연구팀이 개발한 복소 임피던스 타일은 소리가 경계면에 부딪혀서 반사될 때 반사되는 소리의 크기뿐만 아니라 방향까지도 조절하는 것이 가능해지게 한다. 이는 구조물 벽면에서 소리를 흡수만 하는 기존 기술과는 달리, 소리의 크기와 방향을 적절하게 조절해 소리가 틈새로 거의 빠져나가지 않고 구조물 내에서 가둬진 채 줄어들도록 한다.
연구팀은 복소 임피던스 타일을 적용해 밖으로 빠져나가는 소리를 90% 이상 저감할 수 있음을 정밀한 전산 시뮬레이션을 통해 예측한 후, 제작과 실험을 통해 소음 저감 성능을 검증하는 데 성공했다. 심지어, 구조물 내벽에서 소리를 100% 완벽하게 흡수하는 경우보다도 복소 임피던스 타일을 사용했을 때 밖으로 빠져나가는 소리를 훨씬 더 큰 폭으로 저감할 수 있음을 확인했다.
전원주 교수는 “복소 임피던스 타일은 개구부나 틈새를 전혀 막지 않으면서도 소리는 밖으로 빠져나가지 못하게 할 수 있으며, 얇은 두께를 갖기 때문에 상대적으로 협소한 공간을 갖는 시스템에도 적용이 가능하다는 특징이 있다. 특히, 재료가 아닌 구조의 형상적인 특징을 이용하기 때문에 습도나 온도 변화에 따른 유지 보수가 쉬울뿐더러 제작도 용이하다는 장점을 가지고 있어 전자제품(헤어드라이기, 청소기 등)부터 향후 미래 교통수단으로 각광받는 도심 항공 모빌리티까지 다양한 시스템의 소음 저감에 새로운 솔루션으로 활용이 가능하다”고 말했다.
해당 연구 결과는 기계공학과 박사과정 양은진 학생과 김지완 학생이 공동 제1 저자로 참여했으며, 기계공학 분야의 국제 학술지인 `메카니컬 시스템 앤 시그널 프로세싱(Mechanical Systems and Signal Processing) (IF: 7.9, JCR 5/180(2.5%))'에 지난 3월 1일 게재됐다. (논문명: Complex-valued impedance tiles to reduce noise emanating through openings in mechanical systems)
한편, 이번 연구는 한국연구재단의 중견연구자지원사업과 KAIST 도약연구사업의 지원을 받아 수행됐다.
2024.08.06
조회수 5744
-
 변화에 민감한 사용자도 맞춰주는 인공지능 기술 개발
인공지능 심층신경망 모델의 추천시스템에서 시간이 지남에 따라 사용자의 관심이 변하더라도 변화한 관심 또한 효과적으로 학습할 수 있는 인공지능 훈련 기술 개발이 요구되고 있다. 사용자의 관심이 급변하더라도 기존의 지식을 유지하며 새로운 지식을 축적하는 인공지능 연속 학습을 가능하게 하는 기술이 KAIST 연구진에 의해 개발됐다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 데이터 변화에 적응하며 새로운 지식을 학습함과 동시에 기존의 지식을 망각하지 않는 새로운 연속 학습(continual learning) 기술을 개발했다고 5일 밝혔다.
최근 연속 학습은 훈련 비용을 줄일 수 있도록 프롬프트(prompt) 기반 방식이 대세를 이루고 있다. 각 작업에 특화된 지식을 프롬프트에 저장하고, 적절한 프롬프트를 입력 데이터에 추가해 심층신경망에 전달함으로써 과거 지식을 효과적으로 활용한다.
이재길 교수팀은 기존 접근방식과 다르게 작업 간의 다양한 변화 정도에 적응할 수 있는 적응적 프롬프팅(adaptive prompting)에 기반한 연속 학습 기술을 제안했다. 현재 학습하려는 작업이 기존에 학습하였던 작업과 유사하다면 새로운 프롬프트를 생성하지 않고 그 작업에 할당된 프롬프트에 추가로 지식을 축적한다. 즉, 완전히 새로운 작업이 입력될 때만 이를 담당하기 위한 새로운 프롬프트를 생성하도록 하고 연구팀은 새로운 작업이 들어올 때마다 클러스터링이 적절한지 검사해 최적의 클러스터링 상태를 유지하도록 했다.
연구팀은 이미지 분류 문제에 대해 작업 간의 다양한 변화 정도를 가지는 실세계 데이터를 사용해 방법론을 검증했다. 이 결과 연구팀은 기존의 프롬프트 기반 연속 학습 방법론에 비해, 작업 간의 변화 정도가 항상 큰 환경에서는 최대 14%의 정확도 향상을 달성했고, 작업 간의 변화가 클 수도 있고 작을 수도 있는 환경에서는 최대 8%의 정확도 향상을 달성했다.
또한, 제안한 방법에서 유지하는 클러스터 개수가 실제 유사한 작업의 그룹 개수와 거의 같음을 확인했다. 온라인 클러스터링을 수행하는 비용이 매우 작아 대용량 데이터에도 쉽게 적용할 수 있다.
연구팀을 지도한 이재길 교수도 "연속 학습 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 심층 학습 학계 및 산업계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
전산학부 김도영 박사과정 학생이 제1 저자, 이영준 박사과정, 방지환 박사과정 학생이 제4, 제6 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `국제머신러닝학회(ICML) 2024'에서 지난 7월 발표됐다. (논문명 : One Size Fits All for Semantic Shifts: Adaptive Prompt Tuning for Continual Learning)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 사람중심인공지능핵심원천기술개발사업 AI학습능력개선기술개발 과제로 개발한 연구성과 결과물(2022-0-00157, 강건하고 공정하며 확장 가능한 데이터 중심의 연속 학습)이다.
변화에 민감한 사용자도 맞춰주는 인공지능 기술 개발
인공지능 심층신경망 모델의 추천시스템에서 시간이 지남에 따라 사용자의 관심이 변하더라도 변화한 관심 또한 효과적으로 학습할 수 있는 인공지능 훈련 기술 개발이 요구되고 있다. 사용자의 관심이 급변하더라도 기존의 지식을 유지하며 새로운 지식을 축적하는 인공지능 연속 학습을 가능하게 하는 기술이 KAIST 연구진에 의해 개발됐다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 데이터 변화에 적응하며 새로운 지식을 학습함과 동시에 기존의 지식을 망각하지 않는 새로운 연속 학습(continual learning) 기술을 개발했다고 5일 밝혔다.
최근 연속 학습은 훈련 비용을 줄일 수 있도록 프롬프트(prompt) 기반 방식이 대세를 이루고 있다. 각 작업에 특화된 지식을 프롬프트에 저장하고, 적절한 프롬프트를 입력 데이터에 추가해 심층신경망에 전달함으로써 과거 지식을 효과적으로 활용한다.
이재길 교수팀은 기존 접근방식과 다르게 작업 간의 다양한 변화 정도에 적응할 수 있는 적응적 프롬프팅(adaptive prompting)에 기반한 연속 학습 기술을 제안했다. 현재 학습하려는 작업이 기존에 학습하였던 작업과 유사하다면 새로운 프롬프트를 생성하지 않고 그 작업에 할당된 프롬프트에 추가로 지식을 축적한다. 즉, 완전히 새로운 작업이 입력될 때만 이를 담당하기 위한 새로운 프롬프트를 생성하도록 하고 연구팀은 새로운 작업이 들어올 때마다 클러스터링이 적절한지 검사해 최적의 클러스터링 상태를 유지하도록 했다.
연구팀은 이미지 분류 문제에 대해 작업 간의 다양한 변화 정도를 가지는 실세계 데이터를 사용해 방법론을 검증했다. 이 결과 연구팀은 기존의 프롬프트 기반 연속 학습 방법론에 비해, 작업 간의 변화 정도가 항상 큰 환경에서는 최대 14%의 정확도 향상을 달성했고, 작업 간의 변화가 클 수도 있고 작을 수도 있는 환경에서는 최대 8%의 정확도 향상을 달성했다.
또한, 제안한 방법에서 유지하는 클러스터 개수가 실제 유사한 작업의 그룹 개수와 거의 같음을 확인했다. 온라인 클러스터링을 수행하는 비용이 매우 작아 대용량 데이터에도 쉽게 적용할 수 있다.
연구팀을 지도한 이재길 교수도 "연속 학습 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 심층 학습 학계 및 산업계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
전산학부 김도영 박사과정 학생이 제1 저자, 이영준 박사과정, 방지환 박사과정 학생이 제4, 제6 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `국제머신러닝학회(ICML) 2024'에서 지난 7월 발표됐다. (논문명 : One Size Fits All for Semantic Shifts: Adaptive Prompt Tuning for Continual Learning)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 사람중심인공지능핵심원천기술개발사업 AI학습능력개선기술개발 과제로 개발한 연구성과 결과물(2022-0-00157, 강건하고 공정하며 확장 가능한 데이터 중심의 연속 학습)이다.
2024.08.06
조회수 4409
-
 NOVIC+ 연구센터, ′모드해석 공개강좌′ 40주년 기념식 개최
우리 대학 NOVIC+ 연구센터(센터장 박용화)가 '모드해석 공개강좌 40주년 기념식'을 지난달 23일 오후 대전 본원 기계공학동에서 개최했다.
1983년 시작된 모드해석 공개강좌는 우리 대학에서 가장 오래 지속되고 있는 산학협동 공개강좌다. IMF 금융위기, 코로나 등의 다양한 국가적 위기를 이겨내며 40년에 걸쳐 1,970여 명의 수강생을 배출했다.
특히, IMF로 국내 산업이 큰 침체에 빠졌던 시기에도 산학연 종사자들에게 무상으로 교육을 제공해 자동차, 선박, 가전, 기계시스템 등 우리나라 산업을 대표하는 제조업의 성장을 가속화하고 세계 최고의 기술력을 확보하는 일에 기여했다.
모드해석 강좌는 오랜 연구 경험에 바탕을 둔 우리 대학 내부 강사진과 산업 현장의 최신 동향을 공유하는 외부 전문가의 강연으로 구성되어 있다. 현장의 엔지니어와 연구원들이 모드해석법과 관련된 업무를 수행할 때 학문적 바탕이 되는 이론을 요약하여 전달하고 이와 더불어 최신 연구 동향을 소개해 교육의 성과를 높여왔다.
이날 열린 40주년 기념식에는 이균민 교학부총장 및 NOVIC+ 연구센터의 역대 강사진을 비롯해 공개강좌 관계자 70여 명이 참석했으며, 박용화 센터장이 참여 교수진을 대표해 공로패를 받았다.박용화 센터장은 "30년 전의 저는 이 강좌의 박사과정생 실험 조교였는데, 지금은 책임교수가 되어 긴 인연을 이어오고 있다"라고 말했다. 이어, 박 센터장은 "단일 기술의 공개강좌가 40년간 지속되어 왔다는 것은 산업계에 대한 KAIST의 역할을 가장 잘 보여주는 모범 사례로 그동안 헌신하신 강사진과 수강생께 감사의 말씀을 전한다"라고 덧붙였다.
NOVIC+ 연구센터, ′모드해석 공개강좌′ 40주년 기념식 개최
우리 대학 NOVIC+ 연구센터(센터장 박용화)가 '모드해석 공개강좌 40주년 기념식'을 지난달 23일 오후 대전 본원 기계공학동에서 개최했다.
1983년 시작된 모드해석 공개강좌는 우리 대학에서 가장 오래 지속되고 있는 산학협동 공개강좌다. IMF 금융위기, 코로나 등의 다양한 국가적 위기를 이겨내며 40년에 걸쳐 1,970여 명의 수강생을 배출했다.
특히, IMF로 국내 산업이 큰 침체에 빠졌던 시기에도 산학연 종사자들에게 무상으로 교육을 제공해 자동차, 선박, 가전, 기계시스템 등 우리나라 산업을 대표하는 제조업의 성장을 가속화하고 세계 최고의 기술력을 확보하는 일에 기여했다.
모드해석 강좌는 오랜 연구 경험에 바탕을 둔 우리 대학 내부 강사진과 산업 현장의 최신 동향을 공유하는 외부 전문가의 강연으로 구성되어 있다. 현장의 엔지니어와 연구원들이 모드해석법과 관련된 업무를 수행할 때 학문적 바탕이 되는 이론을 요약하여 전달하고 이와 더불어 최신 연구 동향을 소개해 교육의 성과를 높여왔다.
이날 열린 40주년 기념식에는 이균민 교학부총장 및 NOVIC+ 연구센터의 역대 강사진을 비롯해 공개강좌 관계자 70여 명이 참석했으며, 박용화 센터장이 참여 교수진을 대표해 공로패를 받았다.박용화 센터장은 "30년 전의 저는 이 강좌의 박사과정생 실험 조교였는데, 지금은 책임교수가 되어 긴 인연을 이어오고 있다"라고 말했다. 이어, 박 센터장은 "단일 기술의 공개강좌가 40년간 지속되어 왔다는 것은 산업계에 대한 KAIST의 역할을 가장 잘 보여주는 모범 사례로 그동안 헌신하신 강사진과 수강생께 감사의 말씀을 전한다"라고 덧붙였다.
2024.08.05
조회수 3143
-
 문일철 교수팀, 북경대와 영국 ICL 제치고 ICML 2024 챌린지 우승
우리 대학 산업및시스템공학과 문일철 교수 연구팀이 세계 최고 수준의 기계학습 학회인 ‘국제머신러닝학회(ICML, International Conference on Machine Learning) 2024’에서 개최된 ‘멀티모달 작업계획 생성 경진대회(EgoPlan)’에서 다수의 세계 연구팀을 모두 제치고 1위로 우승을 했다고 30일 밝혔다.
본 대회는 7월 21일부터 27일까지 오스트리아 비엔나에서 개최됐으며, 참가자는 북경대(中), 북경 AGI연구소(中) 및 임페리얼칼리지 런던(Imperial College London, 英) 등의 6개국 13개 기관이 참여해 경쟁했다. 우리 연구팀은 국내 유일의 참가 기관으로 7월 26일 우승상 및 혁신상을 수상했다.
이번 대회는 인공지능이 주방에서 요리하는 과정을 비디오 및 지문으로 학습한 이후, 경험하지 못한 요리 과정에서 상식적으로 합당한 의사결정을 내려 조리할 수 있는지를 경쟁하는 시합이었다. 이는 시각 정보와 지문 정보 등의 멀티모달 정보를 조합하며, 학습에 반영되지 않은 상식까지 반영해 의사결정을 내리는 시험이다. 이 기술은 최소한의 학습만으로도 로봇이 다양한 멀티모달 정보 및 기초 상식을 활용해 자율 제조 및 서비스를 수행할 수 있도록 개발하는 것이 핵심이다.
산업및시스템공학과 이광현(석사과정), 강미나(석사과정) 등 총 11명의 팀으로 참가한 응용인공지능 연구실(이하 AAILab) 팀은 상식 기반 추론을 통한 작업계획 생성의 정확도 1위 성능으로 우승상(Outstanding Champion Award) 및 기술의 우수성을 인정받아 혁신상(Innovation Award)을 수상해, 2개 상을 동시에 수상했다. 이번 대회를 위해 AAILab 팀은 멀티모달 대규모 모델의 파인튜닝 학습에 대한 연구 개발 결과를 적용해 우승을 차지했다.
문일철 교수는 “중국팀들이 대회를 위해 위챗(WeChat) 대화방까지 마련해 서로 협력한다는 얘기를 전해 듣고는 경쟁이 치열하다고 느꼈다. 하지만 KAIST 팀도 각고의 노력으로 우승할 수 있었다. 학생들이 두 달 동안 거의 잠을 자지 못했다”고 우승 소회를 밝혔다. 그리고 문 교수는 “이번 대회의 출제 문제는 요리하는 인공지능이지만, 사실 테슬라에서 시험하고 있는 휴머노이드 제조 로봇에 활용될 수 있는 상식을 가진 인공지능을 만드는 기술이 본질이다. 많은 중국 참가자가 보여주듯이 중국의 로봇 및 인공지능 기술 선점 노력을 엿볼 수 있다”라고 분석했다.
이번 연구는 정보통신기획평가원(IITP)에서 지원한 사람중심인공지능 핵심원천기술개발사업 중 ‘이종데이터기반 상식 추출, 이해, 추론을 위한 인공지능 기술개발(연구책임자 문일철)’을 통해 이뤄졌다.
문일철 교수팀, 북경대와 영국 ICL 제치고 ICML 2024 챌린지 우승
우리 대학 산업및시스템공학과 문일철 교수 연구팀이 세계 최고 수준의 기계학습 학회인 ‘국제머신러닝학회(ICML, International Conference on Machine Learning) 2024’에서 개최된 ‘멀티모달 작업계획 생성 경진대회(EgoPlan)’에서 다수의 세계 연구팀을 모두 제치고 1위로 우승을 했다고 30일 밝혔다.
본 대회는 7월 21일부터 27일까지 오스트리아 비엔나에서 개최됐으며, 참가자는 북경대(中), 북경 AGI연구소(中) 및 임페리얼칼리지 런던(Imperial College London, 英) 등의 6개국 13개 기관이 참여해 경쟁했다. 우리 연구팀은 국내 유일의 참가 기관으로 7월 26일 우승상 및 혁신상을 수상했다.
이번 대회는 인공지능이 주방에서 요리하는 과정을 비디오 및 지문으로 학습한 이후, 경험하지 못한 요리 과정에서 상식적으로 합당한 의사결정을 내려 조리할 수 있는지를 경쟁하는 시합이었다. 이는 시각 정보와 지문 정보 등의 멀티모달 정보를 조합하며, 학습에 반영되지 않은 상식까지 반영해 의사결정을 내리는 시험이다. 이 기술은 최소한의 학습만으로도 로봇이 다양한 멀티모달 정보 및 기초 상식을 활용해 자율 제조 및 서비스를 수행할 수 있도록 개발하는 것이 핵심이다.
산업및시스템공학과 이광현(석사과정), 강미나(석사과정) 등 총 11명의 팀으로 참가한 응용인공지능 연구실(이하 AAILab) 팀은 상식 기반 추론을 통한 작업계획 생성의 정확도 1위 성능으로 우승상(Outstanding Champion Award) 및 기술의 우수성을 인정받아 혁신상(Innovation Award)을 수상해, 2개 상을 동시에 수상했다. 이번 대회를 위해 AAILab 팀은 멀티모달 대규모 모델의 파인튜닝 학습에 대한 연구 개발 결과를 적용해 우승을 차지했다.
문일철 교수는 “중국팀들이 대회를 위해 위챗(WeChat) 대화방까지 마련해 서로 협력한다는 얘기를 전해 듣고는 경쟁이 치열하다고 느꼈다. 하지만 KAIST 팀도 각고의 노력으로 우승할 수 있었다. 학생들이 두 달 동안 거의 잠을 자지 못했다”고 우승 소회를 밝혔다. 그리고 문 교수는 “이번 대회의 출제 문제는 요리하는 인공지능이지만, 사실 테슬라에서 시험하고 있는 휴머노이드 제조 로봇에 활용될 수 있는 상식을 가진 인공지능을 만드는 기술이 본질이다. 많은 중국 참가자가 보여주듯이 중국의 로봇 및 인공지능 기술 선점 노력을 엿볼 수 있다”라고 분석했다.
이번 연구는 정보통신기획평가원(IITP)에서 지원한 사람중심인공지능 핵심원천기술개발사업 중 ‘이종데이터기반 상식 추출, 이해, 추론을 위한 인공지능 기술개발(연구책임자 문일철)’을 통해 이뤄졌다.
2024.07.30
조회수 5860
-
 미래를 위한 대체 불가 바이오 제조 전략 제시
2021년 서울국제포럼과 KAIST가 공동 개최한 “글로벌 복합위기와 4차 산업혁명의 대전환기, 탄력성장의 도전과 기회” 포럼에서 KAIST 이상엽 특훈교수는 우리나라가 미래 국가경쟁력을 확보하기 위해서는 대체 불가 기술 (non-fungible technology; NFT)을 확보해야 한다고 처음으로 제시한 바 있다. 기후 변화의 심각성에 연간 약 1.1억 톤의 식품 폐기물을 포함한 다양한 유기 폐기물들, 그리고 이산화탄소도 바이오 제조를 위한 원료로 사용하도록 대체 불가능한 바이오기술(Bio-NFT)로 활용하는 것이 이제 선택이 아닌 필수가 됐다.
우리 대학 생명화학공학과 이상엽 특훈교수가 기술 혁신, 원료 공급 최적화 및 적절한 인프라를 통해 바이오 제조의 확장을 포함한 경쟁력 확보 전략 수립에 대한 논문을 네이처 화학공학지(Nature Chemical Engineering)에 월드뷰(Worldview)에 7월 22일 자로 제시했다고 24일 밝혔다.
※ 논문명 : Fungible and non-fungible technologies in biomanufacturing scale-up
※ 저자 정보 : 이상엽(한국과학기술원, 제1 저자, 교신저자) 1명
최근 신진 대사 공학과 합성 생물학의 급성장은 전통적인 화석 자원에 의존하는 제조 공정을 바이오 기반 대안으로 전환할 수 있는 잠재력을 보여주고 있다. 미생물 세포 공장을 통해 화학물질과 재료를 생산하는 바이오 기반 기술은 빠르게 발전하고 있으며, 이는 각각 5.7조 달러, 9.2조 달러, 22.5조 달러의 시장규모를 가진 화학, 식품 및 소비재 등 다양한 산업 부문에 혁신적인 변화를 가져오고 있다. 이는 2조 달러 규모의 제약시장 보다도 훨씬 크다.
그러나 이러한 바이오 제조로의 전환은 기술적, 경제적, 사회적 장벽으로 인해 어려움을 겪고 있다. 점점 더 많은 사람들이 지구 온난화의 현실과 그 악화되는 영향을 인식하면서 환경에 덜 해로운 제품에 대한 선호도가 높아지고 있지만, 실제 구매 결정에 있어서는 가격이 중요한 역할을 한다. 따라서, 각국 정부들은 규제 지원뿐만 아니라 대중과의 소통을 통해 지속 가능한 생산과 소비에 대한 이해와 헌신을 촉진해야 한다.
이 교수는 중요하게 떠오른 바이오 제조 확장, 특히 범용화학물질 생산 등 대체 불가능하지 않은 바이오기술 (not non-fungible)을 위해 풀어야 할 세 가지 주요 과제를 제시했다.
첫째, 미생물 세포 공장의 TRY(titer, rate, yield; 농도, 속도 및 수율)를 최대화하는 것으로 기존 대사공학에 데이터 과학, 인공지능 및 로봇 공학의 통합을 통해 이러한 역량을 강화해야 한다.
둘째, 원료 공급 및 물류의 최적화가 필요하다. 약 6억 톤의 바이오매스가 연간 바이오 기반 재료 생산을 위해 사용될 수 있지만, 최적의 분배 및 공급망이 완전히 구축되지 않았다. 다양한 원료의 사용을 가능하게 하는 기술 개발이 필요하다.
셋째, 인프라 및 시설 건설에 필요한 대규모 자본 투자 문제이다. 최근 들어 건설비용이 급격히 증가하여 최첨단 제조 시설을 구축하는 데 드는 높은 비용은 운영 확장의 재정적 실행 가능성을 어렵게 한다. 바이오 제조시설 구축을 위한 정책자금 투입 등 국가적인 인프라 개념에서의 투자가 요구되며, 단기적인 해결책으로는 완전히 유연한 중형 바이오 정제소를 건설하여 시장에 가장 적합한 제품을 생산할 수 있다고 제시했다.
이 교수는 “기술 혁신, 원료 공급 및 인프라 개발에의 집중적인 노력이 필요하다”고 강조하면서 “이를 통해 산업은 보다 지속 가능하고 경제적으로 실행 가능한 바이오 제조 공정으로 전환할 수 있으며, 이는 글로벌 시장에 큰 영향을 미칠 것이다. 지속 가능한 미래에 기여하고 산업에 상당한 경제적 기회를 제공할 것으로 기대된다.”고 밝혔다.
한편 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 ‘바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발’ 과제 (과제책임자 KAIST 이상엽 특훈교수)의 지원을 받아 수행됐다.
미래를 위한 대체 불가 바이오 제조 전략 제시
2021년 서울국제포럼과 KAIST가 공동 개최한 “글로벌 복합위기와 4차 산업혁명의 대전환기, 탄력성장의 도전과 기회” 포럼에서 KAIST 이상엽 특훈교수는 우리나라가 미래 국가경쟁력을 확보하기 위해서는 대체 불가 기술 (non-fungible technology; NFT)을 확보해야 한다고 처음으로 제시한 바 있다. 기후 변화의 심각성에 연간 약 1.1억 톤의 식품 폐기물을 포함한 다양한 유기 폐기물들, 그리고 이산화탄소도 바이오 제조를 위한 원료로 사용하도록 대체 불가능한 바이오기술(Bio-NFT)로 활용하는 것이 이제 선택이 아닌 필수가 됐다.
우리 대학 생명화학공학과 이상엽 특훈교수가 기술 혁신, 원료 공급 최적화 및 적절한 인프라를 통해 바이오 제조의 확장을 포함한 경쟁력 확보 전략 수립에 대한 논문을 네이처 화학공학지(Nature Chemical Engineering)에 월드뷰(Worldview)에 7월 22일 자로 제시했다고 24일 밝혔다.
※ 논문명 : Fungible and non-fungible technologies in biomanufacturing scale-up
※ 저자 정보 : 이상엽(한국과학기술원, 제1 저자, 교신저자) 1명
최근 신진 대사 공학과 합성 생물학의 급성장은 전통적인 화석 자원에 의존하는 제조 공정을 바이오 기반 대안으로 전환할 수 있는 잠재력을 보여주고 있다. 미생물 세포 공장을 통해 화학물질과 재료를 생산하는 바이오 기반 기술은 빠르게 발전하고 있으며, 이는 각각 5.7조 달러, 9.2조 달러, 22.5조 달러의 시장규모를 가진 화학, 식품 및 소비재 등 다양한 산업 부문에 혁신적인 변화를 가져오고 있다. 이는 2조 달러 규모의 제약시장 보다도 훨씬 크다.
그러나 이러한 바이오 제조로의 전환은 기술적, 경제적, 사회적 장벽으로 인해 어려움을 겪고 있다. 점점 더 많은 사람들이 지구 온난화의 현실과 그 악화되는 영향을 인식하면서 환경에 덜 해로운 제품에 대한 선호도가 높아지고 있지만, 실제 구매 결정에 있어서는 가격이 중요한 역할을 한다. 따라서, 각국 정부들은 규제 지원뿐만 아니라 대중과의 소통을 통해 지속 가능한 생산과 소비에 대한 이해와 헌신을 촉진해야 한다.
이 교수는 중요하게 떠오른 바이오 제조 확장, 특히 범용화학물질 생산 등 대체 불가능하지 않은 바이오기술 (not non-fungible)을 위해 풀어야 할 세 가지 주요 과제를 제시했다.
첫째, 미생물 세포 공장의 TRY(titer, rate, yield; 농도, 속도 및 수율)를 최대화하는 것으로 기존 대사공학에 데이터 과학, 인공지능 및 로봇 공학의 통합을 통해 이러한 역량을 강화해야 한다.
둘째, 원료 공급 및 물류의 최적화가 필요하다. 약 6억 톤의 바이오매스가 연간 바이오 기반 재료 생산을 위해 사용될 수 있지만, 최적의 분배 및 공급망이 완전히 구축되지 않았다. 다양한 원료의 사용을 가능하게 하는 기술 개발이 필요하다.
셋째, 인프라 및 시설 건설에 필요한 대규모 자본 투자 문제이다. 최근 들어 건설비용이 급격히 증가하여 최첨단 제조 시설을 구축하는 데 드는 높은 비용은 운영 확장의 재정적 실행 가능성을 어렵게 한다. 바이오 제조시설 구축을 위한 정책자금 투입 등 국가적인 인프라 개념에서의 투자가 요구되며, 단기적인 해결책으로는 완전히 유연한 중형 바이오 정제소를 건설하여 시장에 가장 적합한 제품을 생산할 수 있다고 제시했다.
이 교수는 “기술 혁신, 원료 공급 및 인프라 개발에의 집중적인 노력이 필요하다”고 강조하면서 “이를 통해 산업은 보다 지속 가능하고 경제적으로 실행 가능한 바이오 제조 공정으로 전환할 수 있으며, 이는 글로벌 시장에 큰 영향을 미칠 것이다. 지속 가능한 미래에 기여하고 산업에 상당한 경제적 기회를 제공할 것으로 기대된다.”고 밝혔다.
한편 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 ‘바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발’ 과제 (과제책임자 KAIST 이상엽 특훈교수)의 지원을 받아 수행됐다.
2024.07.25
조회수 6039
-
 미토콘드리아 DNA 돌연변이를 밝혀내다
우리 몸의 세포는 평생 동안 DNA 돌연변이를 지속적으로 축적하며, 이는 세포 간의 유전적 다양성(모자이시즘) 및 세포 노화를 초래한다. 한국 연구진이 세포소기관 미토콘드리아 DNA의 인체 내 모자이시즘 현상을 최초로 규명했다.
우리 대학 의과학대학원 주영석 교수 연구팀 안지송 박사과정이 미토콘드리아 DNA 돌연변이 연구를 주도해 국제 과학학술지 ‘네이처 지네틱스(Nature Genetics)’ 7월 22일 字 온라인판에 게재했다고 24일 밝혔다. (논문명: Mitochondrial DNA mosaicism in normal human somatic cells).
이번 연구에는 서울대학교 의과대학, 연세대학교 의과대학, 고려대학교 의과대학, 국립암센터, 그리고 KAIST 교원창업기업 이노크라스의 연구자들도 참여했다.
미토콘드리아는 세포 에너지 대사 및 사멸에 관여하는 세포소기관으로, 세포핵과 독립적으로 자체 DNA를 가지고 있으며 돌연변이도 발생할 수 있다. 하지만 이러한 돌연변이를 정밀하게 찾아내는 데 필수적인 단일세포 전장유전체(whole-genome sequencing) 기술의 한계로 그동안 미토콘드리아 DNA 돌연변이 및 모자이시즘에 대한 연구는 미흡했다.
연구팀은 31명의 정상 대장 상피 조직, 섬유아세포, 혈액에서 확보한 총 2,096개 단일세포의 전장 유전체 서열을 생명정보학 기법으로 분석해 세계 최대 규모의 연구를 수행했다. 세포 사이에서는 평균적으로 3개의 유의미한 미토콘드리아 DNA 차이가 존재했으며, 대부분은 노화 과정에서 생성됐으나 약 6%의 차이는 모계로부터 이형상태(헤테로플라스미; heteroplasmy)로 전달됨이 확인됐다.
또한, 암 발생 과정에서 돌연변이 수가 유의미하게 증가했으며, 이들 변이 중 일부는 미토콘드리아 RNA 불안정성에 기여한다는 사실도 확인했다. 관찰된 데이터를 바탕으로 연구팀은 인간의 배아 발생단계부터 노화 및 발암 과정에서의 미토콘드리아 발생 및 진화 과정을 이해할 수 있는 모델을 구축했다.
이번 연구는 사람의 정상 세포에서 발생하는 미토콘드리아 DNA 돌연변이의 형성 메커니즘을 체계적으로 밝혀내, 향후 미토콘드리아 DNA가 노화와 질병 발생에 미치는 영향을 이해하는 데 중요한 초석을 제공할 수 있을 것으로 기대된다.
의과학대학원 주영석 교수는 “전장유전체 빅데이터를 체계적으로 활용함으로써 미지의 영역이었던 생명과학 현상을 규명할 수 있다”며, “암 발생 과정뿐만 아니라 인간의 배아 발생과정 및 노화과정에서 나타나는 미토콘드리아 DNA의 변화를 체계적으로 이해할 수 있는 방법을 처음으로 수립했다” 라고 연구의 중요성을 설명했다.
한편 이번 연구는 한국연구재단 리더연구, 선도연구센터 및 서경배과학재단 신진과학자 연구지원 사업의 지원을 받아 수행됐다.
미토콘드리아 DNA 돌연변이를 밝혀내다
우리 몸의 세포는 평생 동안 DNA 돌연변이를 지속적으로 축적하며, 이는 세포 간의 유전적 다양성(모자이시즘) 및 세포 노화를 초래한다. 한국 연구진이 세포소기관 미토콘드리아 DNA의 인체 내 모자이시즘 현상을 최초로 규명했다.
우리 대학 의과학대학원 주영석 교수 연구팀 안지송 박사과정이 미토콘드리아 DNA 돌연변이 연구를 주도해 국제 과학학술지 ‘네이처 지네틱스(Nature Genetics)’ 7월 22일 字 온라인판에 게재했다고 24일 밝혔다. (논문명: Mitochondrial DNA mosaicism in normal human somatic cells).
이번 연구에는 서울대학교 의과대학, 연세대학교 의과대학, 고려대학교 의과대학, 국립암센터, 그리고 KAIST 교원창업기업 이노크라스의 연구자들도 참여했다.
미토콘드리아는 세포 에너지 대사 및 사멸에 관여하는 세포소기관으로, 세포핵과 독립적으로 자체 DNA를 가지고 있으며 돌연변이도 발생할 수 있다. 하지만 이러한 돌연변이를 정밀하게 찾아내는 데 필수적인 단일세포 전장유전체(whole-genome sequencing) 기술의 한계로 그동안 미토콘드리아 DNA 돌연변이 및 모자이시즘에 대한 연구는 미흡했다.
연구팀은 31명의 정상 대장 상피 조직, 섬유아세포, 혈액에서 확보한 총 2,096개 단일세포의 전장 유전체 서열을 생명정보학 기법으로 분석해 세계 최대 규모의 연구를 수행했다. 세포 사이에서는 평균적으로 3개의 유의미한 미토콘드리아 DNA 차이가 존재했으며, 대부분은 노화 과정에서 생성됐으나 약 6%의 차이는 모계로부터 이형상태(헤테로플라스미; heteroplasmy)로 전달됨이 확인됐다.
또한, 암 발생 과정에서 돌연변이 수가 유의미하게 증가했으며, 이들 변이 중 일부는 미토콘드리아 RNA 불안정성에 기여한다는 사실도 확인했다. 관찰된 데이터를 바탕으로 연구팀은 인간의 배아 발생단계부터 노화 및 발암 과정에서의 미토콘드리아 발생 및 진화 과정을 이해할 수 있는 모델을 구축했다.
이번 연구는 사람의 정상 세포에서 발생하는 미토콘드리아 DNA 돌연변이의 형성 메커니즘을 체계적으로 밝혀내, 향후 미토콘드리아 DNA가 노화와 질병 발생에 미치는 영향을 이해하는 데 중요한 초석을 제공할 수 있을 것으로 기대된다.
의과학대학원 주영석 교수는 “전장유전체 빅데이터를 체계적으로 활용함으로써 미지의 영역이었던 생명과학 현상을 규명할 수 있다”며, “암 발생 과정뿐만 아니라 인간의 배아 발생과정 및 노화과정에서 나타나는 미토콘드리아 DNA의 변화를 체계적으로 이해할 수 있는 방법을 처음으로 수립했다” 라고 연구의 중요성을 설명했다.
한편 이번 연구는 한국연구재단 리더연구, 선도연구센터 및 서경배과학재단 신진과학자 연구지원 사업의 지원을 받아 수행됐다.
2024.07.24
조회수 6696
-
 아이시스츠, 분열된 사회 연결 플랫폼 구축 ‘해커페어’ 개최
우리 대학 학생 단체 아이시스츠(ICISTS)가 다음 달 7일부터 5일간 '아이시스츠 해커페어(ICISTS Hackafair) 2024'를 개최한다.
'분열된 사회의 재연결(Reconnect Society)'을 주제로 열리는 이번 해커페어는 세계 각국 대학생 참가자들이 참신한 발상을 겨루는 '아이디어톤(Ideathon)'을 중심으로 진행한다.
아이시스츠가 새롭게 시도하는 '해커페어'는 아이디어를 경쟁적으로 구체화하는 해커톤(Hackathon)에서 한발 더 나아간 형태의 경연이다. 제시된 주제를 해결하기 위한 플랫폼·디바이스·교통수단·건축물·정책 등의 방안을 자유롭게 제안하는 '아이디어톤'을 3일간 진행한 뒤, 완성한 결과물을 박람회(Tech-Fair)에 곧바로 출품해 수익성과 지속 가능성까지 평가받아 승자를 가리는 방식이다.
참가자들은 디자이너·엔지니어·마케터로 역할을 나누고 팀을 구성한 뒤, 국내·외에서 벌어지고 있는 각종 사회적 갈등과 단절 사례를 선정하고 이를 극복하기 위한 해결책을 워크숍 기간 내에 완성해야 한다. 이 과정에서 우리 대학 교수진을 포함한 과학기술 및 사회 전문가들이 멘토로 참여해 조언할 예정이다.
아이디어 톤의 결과물은 행사 마지막 날 열리는 박람회에 출품돼 시연된다. 심사위원단은 ▴해당 아이디어가 해결하는 문제의 중요성 ▴아이디어의 논리적 완결성 및 구현의 완성도 ▴결과물의 수익성 및 지속 가능성 ▴독창성 등을 종합적으로 평가해 수상팀을 가린다.
또한, 행사 첫날에는 김문조 고려대학교 사회학과 명예교수가 분열된 사회의 정의와 사례, 문제 해결의 필요성을 주제로 기조연설하며, 참가자는 물론 우리 대학 재학생과 시민에게도 무료로 공개된다.
행사 셋째 날에는 '사회적 기업의 창업과 지속 가능성'을 주제로 토크 콘서트가 열려 강남우 조천식모빌리티대학원 교수, 청년스타트업인 하이어와 나눔비타민의 정민서·김하연 대표가 연사로 참여한다.
지난 2003년 시작돼 올해로 16회째를 맞은 아이시스츠의 국제 대학생 학술 행사는 그간 20개국, 60여 대학 소속의 3천 4백여 명이 참여해 미래의 리더와 현재의 리더를 잇는 네트워크로 자리 잡았다.
이번 행사를 준비한 김지환 아이시스츠 조직위원장(건설및환경공학과)은 "해커페어 2024는 분열된 사회의 재연결이라는 중요한 사회 문제를 함께 고민하고 해결책을 강구하는 자리이자 코로나19 이후 축소된 대학생 주도의 국제 학술행사를 되살려 전 세계 대학생들의 인적 네트워크를 구축하는 의미 있는 시간이 될 것"이라고 강조했다.
해커페어 2024는 8월 4일까지 참가팀을 모집하며, 자세한 내용 및 참가신청 양식은 아이시스츠 공식 홈페이지(www.icists.org)에서 확인할 수 있다. 한편, 학부생 동아리 아이시스츠(ICISTS, International Challengers for the Integration of Science, Technology, and Society)는 2003년 11월 하버드대학이 주관하는 국제학생회의(H-PAIR)의 파트너 단체로 시작해 2005년 독자적인 단체로 자리매김했다. 그동안 아시아 최대 규모의 대학생 콘퍼런스를 포함해 23회의 주요 행사를 열어 약 3천 4백 여명의 각국 대학생이 참여했다. 과학기술과 사회의 연결고리가 되는 학술행사 개최의 성과를 인정받아 2013년부터 2017년까지 4년 연속으로 유네스코 한국위원회가 선정하는 '지속가능발전교육 공식 프로젝트'에 이름을 올리기도 했다.
아이시스츠, 분열된 사회 연결 플랫폼 구축 ‘해커페어’ 개최
우리 대학 학생 단체 아이시스츠(ICISTS)가 다음 달 7일부터 5일간 '아이시스츠 해커페어(ICISTS Hackafair) 2024'를 개최한다.
'분열된 사회의 재연결(Reconnect Society)'을 주제로 열리는 이번 해커페어는 세계 각국 대학생 참가자들이 참신한 발상을 겨루는 '아이디어톤(Ideathon)'을 중심으로 진행한다.
아이시스츠가 새롭게 시도하는 '해커페어'는 아이디어를 경쟁적으로 구체화하는 해커톤(Hackathon)에서 한발 더 나아간 형태의 경연이다. 제시된 주제를 해결하기 위한 플랫폼·디바이스·교통수단·건축물·정책 등의 방안을 자유롭게 제안하는 '아이디어톤'을 3일간 진행한 뒤, 완성한 결과물을 박람회(Tech-Fair)에 곧바로 출품해 수익성과 지속 가능성까지 평가받아 승자를 가리는 방식이다.
참가자들은 디자이너·엔지니어·마케터로 역할을 나누고 팀을 구성한 뒤, 국내·외에서 벌어지고 있는 각종 사회적 갈등과 단절 사례를 선정하고 이를 극복하기 위한 해결책을 워크숍 기간 내에 완성해야 한다. 이 과정에서 우리 대학 교수진을 포함한 과학기술 및 사회 전문가들이 멘토로 참여해 조언할 예정이다.
아이디어 톤의 결과물은 행사 마지막 날 열리는 박람회에 출품돼 시연된다. 심사위원단은 ▴해당 아이디어가 해결하는 문제의 중요성 ▴아이디어의 논리적 완결성 및 구현의 완성도 ▴결과물의 수익성 및 지속 가능성 ▴독창성 등을 종합적으로 평가해 수상팀을 가린다.
또한, 행사 첫날에는 김문조 고려대학교 사회학과 명예교수가 분열된 사회의 정의와 사례, 문제 해결의 필요성을 주제로 기조연설하며, 참가자는 물론 우리 대학 재학생과 시민에게도 무료로 공개된다.
행사 셋째 날에는 '사회적 기업의 창업과 지속 가능성'을 주제로 토크 콘서트가 열려 강남우 조천식모빌리티대학원 교수, 청년스타트업인 하이어와 나눔비타민의 정민서·김하연 대표가 연사로 참여한다.
지난 2003년 시작돼 올해로 16회째를 맞은 아이시스츠의 국제 대학생 학술 행사는 그간 20개국, 60여 대학 소속의 3천 4백여 명이 참여해 미래의 리더와 현재의 리더를 잇는 네트워크로 자리 잡았다.
이번 행사를 준비한 김지환 아이시스츠 조직위원장(건설및환경공학과)은 "해커페어 2024는 분열된 사회의 재연결이라는 중요한 사회 문제를 함께 고민하고 해결책을 강구하는 자리이자 코로나19 이후 축소된 대학생 주도의 국제 학술행사를 되살려 전 세계 대학생들의 인적 네트워크를 구축하는 의미 있는 시간이 될 것"이라고 강조했다.
해커페어 2024는 8월 4일까지 참가팀을 모집하며, 자세한 내용 및 참가신청 양식은 아이시스츠 공식 홈페이지(www.icists.org)에서 확인할 수 있다. 한편, 학부생 동아리 아이시스츠(ICISTS, International Challengers for the Integration of Science, Technology, and Society)는 2003년 11월 하버드대학이 주관하는 국제학생회의(H-PAIR)의 파트너 단체로 시작해 2005년 독자적인 단체로 자리매김했다. 그동안 아시아 최대 규모의 대학생 콘퍼런스를 포함해 23회의 주요 행사를 열어 약 3천 4백 여명의 각국 대학생이 참여했다. 과학기술과 사회의 연결고리가 되는 학술행사 개최의 성과를 인정받아 2013년부터 2017년까지 4년 연속으로 유네스코 한국위원회가 선정하는 '지속가능발전교육 공식 프로젝트'에 이름을 올리기도 했다.
2024.07.19
조회수 4634
-
 바이러스와 세균의 진화를 규명하다
바이러스는 특정 세포 안에 침투했을 때만 증식의 생명력을 띠고 그 외에는 무생물 같으며, 사람 세포를 감염시키는 코로나19 바이러스, 세균을 잡아먹으며 증식하는 세균바이러스 등이 있다. 국내 연구진이 세균바이러스가 RNA 합성을 마무리 짓는 방식에 해체종결(1)만 있고 재생종결(2)은 없다는 사실을 밝히고 RNA 의약품 개발에 응용될 가능성을 높였다.
(1)해체종결: 합성 복합체가 중합효소, DNA, RNA로 해체
(2)재생종결: RNA만 분리되고 중합효소는 DNA에 남아 재생
우리 대학 생명과학과 강창원 명예교수(줄기세포연구센터 고문)와 서울대학교 물리천문학부 홍성철 교수의 공동연구팀이 세균의 리보핵산(RNA) 합성방식 두 가지 중 하나가 바이러스에는 없다는 것을 발견해, 세균이 바이러스로부터 진화하면서 획득한 방식을 처음 밝힌 연구 논문을 핵산 분야 최상급 국제학술지에 게재했다고 19일 밝혔다.
유전자 DNA의 유전정보에 따라 RNA를 합성하는 효소가 RNA 중합효소다. 이는 유전정보가 DNA에서 RNA로 옮겨 적히기에 전사(轉寫)라고 부르는 유전자 발현 첫 단계를 수행하며, RNA 백신 등 첨단 RNA 의약품을 개발 생산하는 데에 쓰인다. 연구팀은 세균바이러스의 RNA 중합효소를 연구해서 생물로 진화하기 이전 태초의 RNA 합성(전사) 방식을 밝힌 것이다.
유전자에 따라 다른 게 아니라 어느 유전자든 전사 마무리 방식에 두 가지가 있다는 것을 수년 전 세균에서 발견했었다. 그리고 세균보다 진화한 진핵생물 효모의 유전자 전사에서도 두 방식이 모두 쓰인다는 것이 지난달에 보고됐다. 사람도 진핵생물이어서, 세균과 효모뿐 아니라 사람까지 온갖 생물의 유전자 전사에 두 방식 모두 쓰일 개연성이 커졌다.
그런데 이번 연구에서 세균바이러스의 방식은 세균이나 효모와 사뭇 다르다는 것이 밝혀졌다. 바이러스의 경우 재생종결 없이 해체종결만 일어나는 것이다. 이를 토대로, 연구팀은 RNA 중합효소가 세균에서 바이러스와 달리 적응하면서 해체종결에 재생종결이 추가돼 두 방식이 공존하게 되었고, 최소한 효모로의 진화에서 그대로 보존됐다는 해석을 내놓았다.
이번 연구에서 거푸집 DNA와 전사물 RNA에 각기 다른 형광물질을 부착해 전사 복합체 하나하나의 형광을 실시간으로 측정하는 단일분자 형광기술 연구기법이 사용됐다. 전사 종결로 RNA가 방출될 때 DNA가 효소에 붙어있는지 떨어지는지를 낱낱이 구별할 수 있게 설계한 것이 특장점이다. 특히 형광물질이 전사 반응에 지장을 주지 않도록 하는 게 관건이었다.
송은호 박사후연구원과 한선 박사과정 대학원생이 공동 제1 저자로 참여한 논문(제목: Single-mode termination of phage transcriptions, disclosing bacterial adaptation for facilitated reinitiations)이 학술지 핵산연구(Nucleic Acids Research)에 7월 16일 게재됐다. 이로써 강창원 교수와 홍성철 교수는 2017년부터 총 8편의 논문을 공동으로 발표했다.
강창원 교수는 "이번 연구를 통해 수 초 동안의 분자 반응에서 유구한 진화과정을 밝혀냈고, 앞으로 더 광범위한 진화를 연구할 계획이다”라고 했다. 홍성철 교수는 "분자 하나하나를 관찰하여 복잡한 생물체의 진화를 파악했고, 이런 단일분자 연구기법을 차세대 RNA 의약품과 진단 시약의 개발에 응용하는 연구로 이어가고자 한다”라고 했다.
바이러스와 세균의 진화를 규명하다
바이러스는 특정 세포 안에 침투했을 때만 증식의 생명력을 띠고 그 외에는 무생물 같으며, 사람 세포를 감염시키는 코로나19 바이러스, 세균을 잡아먹으며 증식하는 세균바이러스 등이 있다. 국내 연구진이 세균바이러스가 RNA 합성을 마무리 짓는 방식에 해체종결(1)만 있고 재생종결(2)은 없다는 사실을 밝히고 RNA 의약품 개발에 응용될 가능성을 높였다.
(1)해체종결: 합성 복합체가 중합효소, DNA, RNA로 해체
(2)재생종결: RNA만 분리되고 중합효소는 DNA에 남아 재생
우리 대학 생명과학과 강창원 명예교수(줄기세포연구센터 고문)와 서울대학교 물리천문학부 홍성철 교수의 공동연구팀이 세균의 리보핵산(RNA) 합성방식 두 가지 중 하나가 바이러스에는 없다는 것을 발견해, 세균이 바이러스로부터 진화하면서 획득한 방식을 처음 밝힌 연구 논문을 핵산 분야 최상급 국제학술지에 게재했다고 19일 밝혔다.
유전자 DNA의 유전정보에 따라 RNA를 합성하는 효소가 RNA 중합효소다. 이는 유전정보가 DNA에서 RNA로 옮겨 적히기에 전사(轉寫)라고 부르는 유전자 발현 첫 단계를 수행하며, RNA 백신 등 첨단 RNA 의약품을 개발 생산하는 데에 쓰인다. 연구팀은 세균바이러스의 RNA 중합효소를 연구해서 생물로 진화하기 이전 태초의 RNA 합성(전사) 방식을 밝힌 것이다.
유전자에 따라 다른 게 아니라 어느 유전자든 전사 마무리 방식에 두 가지가 있다는 것을 수년 전 세균에서 발견했었다. 그리고 세균보다 진화한 진핵생물 효모의 유전자 전사에서도 두 방식이 모두 쓰인다는 것이 지난달에 보고됐다. 사람도 진핵생물이어서, 세균과 효모뿐 아니라 사람까지 온갖 생물의 유전자 전사에 두 방식 모두 쓰일 개연성이 커졌다.
그런데 이번 연구에서 세균바이러스의 방식은 세균이나 효모와 사뭇 다르다는 것이 밝혀졌다. 바이러스의 경우 재생종결 없이 해체종결만 일어나는 것이다. 이를 토대로, 연구팀은 RNA 중합효소가 세균에서 바이러스와 달리 적응하면서 해체종결에 재생종결이 추가돼 두 방식이 공존하게 되었고, 최소한 효모로의 진화에서 그대로 보존됐다는 해석을 내놓았다.
이번 연구에서 거푸집 DNA와 전사물 RNA에 각기 다른 형광물질을 부착해 전사 복합체 하나하나의 형광을 실시간으로 측정하는 단일분자 형광기술 연구기법이 사용됐다. 전사 종결로 RNA가 방출될 때 DNA가 효소에 붙어있는지 떨어지는지를 낱낱이 구별할 수 있게 설계한 것이 특장점이다. 특히 형광물질이 전사 반응에 지장을 주지 않도록 하는 게 관건이었다.
송은호 박사후연구원과 한선 박사과정 대학원생이 공동 제1 저자로 참여한 논문(제목: Single-mode termination of phage transcriptions, disclosing bacterial adaptation for facilitated reinitiations)이 학술지 핵산연구(Nucleic Acids Research)에 7월 16일 게재됐다. 이로써 강창원 교수와 홍성철 교수는 2017년부터 총 8편의 논문을 공동으로 발표했다.
강창원 교수는 "이번 연구를 통해 수 초 동안의 분자 반응에서 유구한 진화과정을 밝혀냈고, 앞으로 더 광범위한 진화를 연구할 계획이다”라고 했다. 홍성철 교수는 "분자 하나하나를 관찰하여 복잡한 생물체의 진화를 파악했고, 이런 단일분자 연구기법을 차세대 RNA 의약품과 진단 시약의 개발에 응용하는 연구로 이어가고자 한다”라고 했다.
2024.07.19
조회수 6295
-
 챗MOF로 96.9% 금속 유기 골격체 물성 예측하다
우리 대학 연구진이 챗GPT를 활용해 큰 다공성, 높은 표면적, 그리고 뛰어난 조절 가능성으로 많은 화학 응용 분야에서 사용되는 금속 유기 골격체의 특성을 예측하고 새로운 재료를 자동으로 생성하는 챗봇 시스템(이하 챗MOF)을 개발했다. 챗MOF는 검색 및 예측 작업에서 각각 96.9% 및 95.7%의 높은 성공률을 보여 화제다.
생명화학공학과 김지한 교수 연구팀이 인공지능(AI)의 급격한 발전에 주목하며, 대규모 언어 모델(이하 LLMs) 활용을 통해 금속 유기 골격체(Metal-Organic Frameworks, MOFs)의 특성을 예측하고 새로운 재료를 자동으로 생성하는 챗봇 시스템(ChatMOF)을 개발했다고 26일 발표했다.
최근 인공지능(AI)의 발전에는 큰 도약이 있었지만 재료 과학에서의 LLM의 잠재력을 완전히 실현하기에는 여전히 물질의 복잡성과 재료별 특화된 훈련 데이터의 부족이라는 한계점이 존재했다.
김지한 교수 연구팀이 개발한 챗MOF는 재료 분야에서 전통적인 머신러닝 모델과 LLM을 결합한 혁신적인 접근 방식으로 계산 및 머신러닝 도구에 대한 초보자들과의 격차를 상당히 줄일 수 있는 잠재력을 가지고 있다.
또한 이 독특한 시스템은 인공지능의 변혁적인 능력과 재료 과학의 복잡한 측면들을 연결하며, 다양한 작업에서 뛰어난 성능을 보여준다. 챗MOF는 검색 및 예측 작업에서 각각 96.9% 및 95.7%의 높은 성공률을 보고한다. 한편, 더 복잡한 구조 생성 작업은 그 복잡함에도 불구하고 주목할 만한 87.5%의 정확도를 달성한다. 이러한 유망한 결과는 챗MOF가 가장 요구가 많은 작업을 관리하는 데도 효과적임을 강조한다.
김지한 교수는 “연구팀이 개발한 기술은 재료 과학 분야에서 인공지능의 더 높은 자율성을 달성하기 위한 중요한 진전을 나타낸다. 기술이 발전함에 따라, 모델 용량과 온라인 플랫폼에서의 데이터 공유에 대한 체계적인 개선을 통해 챗MOF의 성능을 더욱 최적화할 수 있으며, 이는 금속 유기 골격체 연구 분야에서 놀라운 진전을 촉진할 수 있다.”라고 말했다.
생명화학공학과 강영훈 박사과정이 제1 저자로 참여한 이번 연구 결과는 국제 학술지 `네이처 커뮤니케이션즈(Nature communications)'에 지난 6월 3일 게재됐다. (논문명: ChatMOF: An Artificial Intelligence System for Predicting and Generating Metal-Organic Frameworks Using Large Language Models)
한편 이번 연구는 과학기술정보통신부의 지원으로 국가 소재 연구 데이터 사업단, 그리고 한국연구재단 (NRF) 중견 연구자 지원 사업의 지원을 받아 수행됐다.
챗MOF로 96.9% 금속 유기 골격체 물성 예측하다
우리 대학 연구진이 챗GPT를 활용해 큰 다공성, 높은 표면적, 그리고 뛰어난 조절 가능성으로 많은 화학 응용 분야에서 사용되는 금속 유기 골격체의 특성을 예측하고 새로운 재료를 자동으로 생성하는 챗봇 시스템(이하 챗MOF)을 개발했다. 챗MOF는 검색 및 예측 작업에서 각각 96.9% 및 95.7%의 높은 성공률을 보여 화제다.
생명화학공학과 김지한 교수 연구팀이 인공지능(AI)의 급격한 발전에 주목하며, 대규모 언어 모델(이하 LLMs) 활용을 통해 금속 유기 골격체(Metal-Organic Frameworks, MOFs)의 특성을 예측하고 새로운 재료를 자동으로 생성하는 챗봇 시스템(ChatMOF)을 개발했다고 26일 발표했다.
최근 인공지능(AI)의 발전에는 큰 도약이 있었지만 재료 과학에서의 LLM의 잠재력을 완전히 실현하기에는 여전히 물질의 복잡성과 재료별 특화된 훈련 데이터의 부족이라는 한계점이 존재했다.
김지한 교수 연구팀이 개발한 챗MOF는 재료 분야에서 전통적인 머신러닝 모델과 LLM을 결합한 혁신적인 접근 방식으로 계산 및 머신러닝 도구에 대한 초보자들과의 격차를 상당히 줄일 수 있는 잠재력을 가지고 있다.
또한 이 독특한 시스템은 인공지능의 변혁적인 능력과 재료 과학의 복잡한 측면들을 연결하며, 다양한 작업에서 뛰어난 성능을 보여준다. 챗MOF는 검색 및 예측 작업에서 각각 96.9% 및 95.7%의 높은 성공률을 보고한다. 한편, 더 복잡한 구조 생성 작업은 그 복잡함에도 불구하고 주목할 만한 87.5%의 정확도를 달성한다. 이러한 유망한 결과는 챗MOF가 가장 요구가 많은 작업을 관리하는 데도 효과적임을 강조한다.
김지한 교수는 “연구팀이 개발한 기술은 재료 과학 분야에서 인공지능의 더 높은 자율성을 달성하기 위한 중요한 진전을 나타낸다. 기술이 발전함에 따라, 모델 용량과 온라인 플랫폼에서의 데이터 공유에 대한 체계적인 개선을 통해 챗MOF의 성능을 더욱 최적화할 수 있으며, 이는 금속 유기 골격체 연구 분야에서 놀라운 진전을 촉진할 수 있다.”라고 말했다.
생명화학공학과 강영훈 박사과정이 제1 저자로 참여한 이번 연구 결과는 국제 학술지 `네이처 커뮤니케이션즈(Nature communications)'에 지난 6월 3일 게재됐다. (논문명: ChatMOF: An Artificial Intelligence System for Predicting and Generating Metal-Organic Frameworks Using Large Language Models)
한편 이번 연구는 과학기술정보통신부의 지원으로 국가 소재 연구 데이터 사업단, 그리고 한국연구재단 (NRF) 중견 연구자 지원 사업의 지원을 받아 수행됐다.
2024.06.26
조회수 7515
-
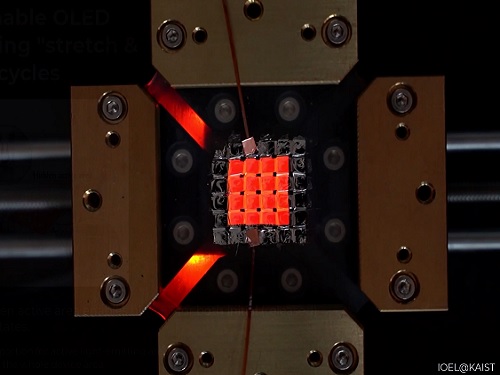 잡아당겨도 고화질 유지하는 디스플레이 개발
평면에 국한됐던 디스플레이 기술이 곡면형 모니터나 폴더블 휴대폰 화면처럼 다양한 형태로 진화되고 있는데, 이보다 더 나아가 잡아당겨도 동작 가능한 신축형 디스플레이의 핵심 기술이 개발되어 화제다.
우리 대학 전기및전자공학부 유승협 교수 연구팀이 동아대 문한얼 교수, 한국전자통신연구원(ETRI) 실감소자 연구본부와의 협력을 통해 세계 최고 수준의 높은 발광면적비를 가지며 신축 시에도 해상도가 거의 줄지 않는 신축 유기발광다이오드(organic light-emitting diode, OLED) 디스플레이를 구현하는 데 성공했다고 11일 밝혔다.
공동연구팀은 유연성이 매우 뛰어난 초박막 OLED를 개발하여 이의 일부 발광 면적을 인접한 두 고립 영역 사이로 숨겨 넣는 방법으로, 신축성과 높은 발광 밀도를 동시에 확보하는 데 성공했다. 이렇게 숨겨진 발광 영역은 신축 시 그 모습을 점차 드러내며 발광 면적비의 감소를 보상하는 메커니즘을 가능케 했다.
기존의 신축형 디스플레이는 고정된 단단한 발광 부분을 이용하여 성능을 확보하면서, 굽혀진 모양의 연결부를 통해 신축성을 확보하는 경우가 일반적이다. 그런데 이 경우 빛을 내지 않는 굽힘 모양 연결부로 인해, 전체 면적에서 발광면적이 차지하는 비율이 낮은 한계점이 있다. 특히, 신축시에는 늘어난 굽힘 모양 연결부가 차지하는 면적이 더욱 커지면서 발광면적 비율이 한층 더 감소하는 문제가 있다.
공동연구팀은 제안된 구조체를 통해 신축 전 발광면적비가 100%에 근접하는 최고 수준을 달성했으며, 30%의 시스템 신축 후 발광면적비 또한 단지 10% 감소하는 플랫폼을 구현했다. 이는 같은 변형하에서 기존 플랫폼이 60% 수준의 높은 발광면적비 감소를 보이는 것과 대조적인 결과다. 또한 본 플랫폼은 반복 동작 및 다양한 외력 하에서도, 강건하게 동작하는 기계적 안정성을 보였다.
공동연구팀은 구형 물체, 실린더, 인체 부위와 같은 곡면에서 안정적으로 동작해, 풍선의 팽창이나 관절의 움직임 등을 수용할 수 있는 웨어러블 및 자유곡면에 부착할 수 있는 광원에 대한 응용성을 확인했으며, 숨겨진 발광영역의 독립적 구동을 통해 신축 시 저감되는 해상도 보상이 가능한 미래 디스플레이의 가능성을 확인하였다.
유승협 교수는 “이미 우리는 폴더블 휴대폰이나 곡면형 모니터 같이 더 이상 평면이 아닌 디스플레이를 쉽게 볼 수 있는 시대에 살고 있는데, 미래에는 디스플레이의 형태가 더욱 다양해지면서 궁극적으로 늘려도 동작하는 신축형 디스플레이 기술로 확장될 것으로 기대된다”면서 “이번에 개발된 기술은, 우수한 성능과 안정성이 확보된 OLED 기술을 그대로 활용하면서도 기존 신축형 디스플레이의 난제를 극복하는 방법을 제시한 것으로서, 신축형 디스플레이의 제품화를 더욱 가속화하는 계기가 되기를 희망한다”고 말했다.
유승협 교수 연구실의 이동균 박사(現 서울대학교 연수연구원)가 제1 저자로 수행한 이번 연구는 국제 학술지 ‘네이처 커뮤니케이션즈 (Nature Communications)’ 2024년 6월 5일자 게재됐으며 (논문명: Stretchable OLEDs based on a hidden active area for high fill factor and resolution compensation, DOI:: 10.1038/s41467-024-48396-w), 미국의 전기전자기술자협회 (Institute of Electrical and Electronics Engineers, IEEE)의 매거진인 ‘IEEE Spectrum’에 의해 온라인 뉴스로 소개되기도 하였다.
이번 연구는 한국연구재단 선도연구센터 사업(인체부착형 빛 치료 공학연구센터) 및 한국전자통신연구원 연구운영비지원사업(ICT 소재·부품·장비 자립 및 도전 기술 개발)의 지원을 받아 수행됐다.
잡아당겨도 고화질 유지하는 디스플레이 개발
평면에 국한됐던 디스플레이 기술이 곡면형 모니터나 폴더블 휴대폰 화면처럼 다양한 형태로 진화되고 있는데, 이보다 더 나아가 잡아당겨도 동작 가능한 신축형 디스플레이의 핵심 기술이 개발되어 화제다.
우리 대학 전기및전자공학부 유승협 교수 연구팀이 동아대 문한얼 교수, 한국전자통신연구원(ETRI) 실감소자 연구본부와의 협력을 통해 세계 최고 수준의 높은 발광면적비를 가지며 신축 시에도 해상도가 거의 줄지 않는 신축 유기발광다이오드(organic light-emitting diode, OLED) 디스플레이를 구현하는 데 성공했다고 11일 밝혔다.
공동연구팀은 유연성이 매우 뛰어난 초박막 OLED를 개발하여 이의 일부 발광 면적을 인접한 두 고립 영역 사이로 숨겨 넣는 방법으로, 신축성과 높은 발광 밀도를 동시에 확보하는 데 성공했다. 이렇게 숨겨진 발광 영역은 신축 시 그 모습을 점차 드러내며 발광 면적비의 감소를 보상하는 메커니즘을 가능케 했다.
기존의 신축형 디스플레이는 고정된 단단한 발광 부분을 이용하여 성능을 확보하면서, 굽혀진 모양의 연결부를 통해 신축성을 확보하는 경우가 일반적이다. 그런데 이 경우 빛을 내지 않는 굽힘 모양 연결부로 인해, 전체 면적에서 발광면적이 차지하는 비율이 낮은 한계점이 있다. 특히, 신축시에는 늘어난 굽힘 모양 연결부가 차지하는 면적이 더욱 커지면서 발광면적 비율이 한층 더 감소하는 문제가 있다.
공동연구팀은 제안된 구조체를 통해 신축 전 발광면적비가 100%에 근접하는 최고 수준을 달성했으며, 30%의 시스템 신축 후 발광면적비 또한 단지 10% 감소하는 플랫폼을 구현했다. 이는 같은 변형하에서 기존 플랫폼이 60% 수준의 높은 발광면적비 감소를 보이는 것과 대조적인 결과다. 또한 본 플랫폼은 반복 동작 및 다양한 외력 하에서도, 강건하게 동작하는 기계적 안정성을 보였다.
공동연구팀은 구형 물체, 실린더, 인체 부위와 같은 곡면에서 안정적으로 동작해, 풍선의 팽창이나 관절의 움직임 등을 수용할 수 있는 웨어러블 및 자유곡면에 부착할 수 있는 광원에 대한 응용성을 확인했으며, 숨겨진 발광영역의 독립적 구동을 통해 신축 시 저감되는 해상도 보상이 가능한 미래 디스플레이의 가능성을 확인하였다.
유승협 교수는 “이미 우리는 폴더블 휴대폰이나 곡면형 모니터 같이 더 이상 평면이 아닌 디스플레이를 쉽게 볼 수 있는 시대에 살고 있는데, 미래에는 디스플레이의 형태가 더욱 다양해지면서 궁극적으로 늘려도 동작하는 신축형 디스플레이 기술로 확장될 것으로 기대된다”면서 “이번에 개발된 기술은, 우수한 성능과 안정성이 확보된 OLED 기술을 그대로 활용하면서도 기존 신축형 디스플레이의 난제를 극복하는 방법을 제시한 것으로서, 신축형 디스플레이의 제품화를 더욱 가속화하는 계기가 되기를 희망한다”고 말했다.
유승협 교수 연구실의 이동균 박사(現 서울대학교 연수연구원)가 제1 저자로 수행한 이번 연구는 국제 학술지 ‘네이처 커뮤니케이션즈 (Nature Communications)’ 2024년 6월 5일자 게재됐으며 (논문명: Stretchable OLEDs based on a hidden active area for high fill factor and resolution compensation, DOI:: 10.1038/s41467-024-48396-w), 미국의 전기전자기술자협회 (Institute of Electrical and Electronics Engineers, IEEE)의 매거진인 ‘IEEE Spectrum’에 의해 온라인 뉴스로 소개되기도 하였다.
이번 연구는 한국연구재단 선도연구센터 사업(인체부착형 빛 치료 공학연구센터) 및 한국전자통신연구원 연구운영비지원사업(ICT 소재·부품·장비 자립 및 도전 기술 개발)의 지원을 받아 수행됐다.
2024.06.11
조회수 7448