-
 트랜스포머 대체할 차세대 월드모델 기술 세계 최초 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스 대학교와 협력하여 트랜스포머 및 재귀신경망 기반의 월드모델을 대체할 차세대 에이전트 월드모델 기술을 세계 최초로 개발했다.
월드모델은 인간의 뇌가 현실 세계의 경험을 바탕으로 환경 모델을 구축하는 과정과 유사하다. 이러한 월드모델을 활용하는 인공지능은 특정 행동의 결과를 미리 시뮬레이션해보고 다양한 가설을 검증할 수 있어, 범용 인공지능의 핵심 구성 요소로 여겨진다.
특히, 로봇이나 자율주행 차량과 같은 인공지능 에이전트는 학습을 위해 여러 가지 행동을 시도해 보아야하는데, 이는 위험성과 고장 가능성을 높인다는 단점을 갖는다. 이에 반해, 월드모델을 갖춘 인공지능은 실세계 상호작용 없이도 상상모델 속에서 학습을 가능케 해 큰 이점을 제공한다.
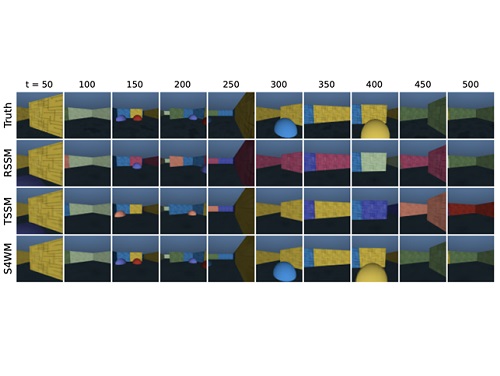
그러나 월드모델은 자연어처리 등에서 큰 발전을 가능하게 한 트랜스포머와 S4와 같은 새로운 시퀀스 모델링 아키텍처의 적용에 한계가 있었다. 이로 인해, 대부분의 월드모델이 성능과 효율성 면에서 제약이 있는 고전적인 재귀적 신경망에 의존하고 있었고 안성진 교수팀은 작년 세계최초로 트랜스포머 기반의 월드모델을 개발하였으나 추론 계산속도나 메모리능력에서 여전히 개선할 문제를 갖고 있었다.
이러한 문제를 해결하기 위해, 안성진 교수가 이끄는 KAIST와 럿거스 대학교 공동연구팀은 재귀적 신경망과 트랜스포머 기반 월드모델의 단점을 극복한 새로운 월드모델의 개발에 성공했다. 연구팀은 S4 시퀀스 모델에 기반한 S4 World Model (S4WM)을 개발하여, 재귀적 신경망의 최대 단점인 병렬처리가 가능한 시퀀스 학습이 불가능하다는 문제를 해결하였다. 또한, 재귀적 신경망의 장점인 빠른 추론시간을 유지하도록 하여 느린 추론 시간을 제공하는 트랜스포머 기반 월드모델의 단점을 극복했다.
연구를 주도한 안성진 교수는 "병렬 학습과 빠른 추론이 가능한 에이전트 월드모델을 세계 최초로 개발했다ˮ며, 이는 "모델기반 강화학습 능력을 획기적으로 개선해 지능형 로봇, 자율주행 차량, 그리고 자율형 인공지능 에이전트 기술 전반에 비용절감과 성능 향상이 예상된다ˮ고 밝혔다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 세계 최고 수준의 인공지능 학회인 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Facing off World Model Backbones: RNNs, Transformers, and S4”Fei Deng, Junyeong Park, Sungjin Ahn, NeurIPS 23, https://arxiv.org/abs/2307.02064
트랜스포머 대체할 차세대 월드모델 기술 세계 최초 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스 대학교와 협력하여 트랜스포머 및 재귀신경망 기반의 월드모델을 대체할 차세대 에이전트 월드모델 기술을 세계 최초로 개발했다.
월드모델은 인간의 뇌가 현실 세계의 경험을 바탕으로 환경 모델을 구축하는 과정과 유사하다. 이러한 월드모델을 활용하는 인공지능은 특정 행동의 결과를 미리 시뮬레이션해보고 다양한 가설을 검증할 수 있어, 범용 인공지능의 핵심 구성 요소로 여겨진다.
특히, 로봇이나 자율주행 차량과 같은 인공지능 에이전트는 학습을 위해 여러 가지 행동을 시도해 보아야하는데, 이는 위험성과 고장 가능성을 높인다는 단점을 갖는다. 이에 반해, 월드모델을 갖춘 인공지능은 실세계 상호작용 없이도 상상모델 속에서 학습을 가능케 해 큰 이점을 제공한다.
그러나 월드모델은 자연어처리 등에서 큰 발전을 가능하게 한 트랜스포머와 S4와 같은 새로운 시퀀스 모델링 아키텍처의 적용에 한계가 있었다. 이로 인해, 대부분의 월드모델이 성능과 효율성 면에서 제약이 있는 고전적인 재귀적 신경망에 의존하고 있었고 안성진 교수팀은 작년 세계최초로 트랜스포머 기반의 월드모델을 개발하였으나 추론 계산속도나 메모리능력에서 여전히 개선할 문제를 갖고 있었다.
이러한 문제를 해결하기 위해, 안성진 교수가 이끄는 KAIST와 럿거스 대학교 공동연구팀은 재귀적 신경망과 트랜스포머 기반 월드모델의 단점을 극복한 새로운 월드모델의 개발에 성공했다. 연구팀은 S4 시퀀스 모델에 기반한 S4 World Model (S4WM)을 개발하여, 재귀적 신경망의 최대 단점인 병렬처리가 가능한 시퀀스 학습이 불가능하다는 문제를 해결하였다. 또한, 재귀적 신경망의 장점인 빠른 추론시간을 유지하도록 하여 느린 추론 시간을 제공하는 트랜스포머 기반 월드모델의 단점을 극복했다.
연구를 주도한 안성진 교수는 "병렬 학습과 빠른 추론이 가능한 에이전트 월드모델을 세계 최초로 개발했다ˮ며, 이는 "모델기반 강화학습 능력을 획기적으로 개선해 지능형 로봇, 자율주행 차량, 그리고 자율형 인공지능 에이전트 기술 전반에 비용절감과 성능 향상이 예상된다ˮ고 밝혔다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 세계 최고 수준의 인공지능 학회인 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Facing off World Model Backbones: RNNs, Transformers, and S4”Fei Deng, Junyeong Park, Sungjin Ahn, NeurIPS 23, https://arxiv.org/abs/2307.02064
2023.11.09
조회수 6921
-
 탁지훈 박사과정, 2023 구글 PhD 펠로우 선정
우리 대학 김재철AI대학원 박사과정 탁지훈 학생(지도교수 신진우)이 ‘2023 구글 PhD 펠로우’에 선정됐다.
구글 PhD 펠로우십은 컴퓨터 과학과 관련된 유망 연구 분야에서 우수한 성과를 낸 대학원생을 지원하는 장학 프로그램으로 올해는 전 세계에서 67명이 선발됐다. 선정된 펠로우에게는 1만 달러의 장학금과 구글 각 분야 전문가 멘토와의 일대일 연구 토의, 피드백 등의 혜택이 주어진다.
탁지훈 학생은 기계학습(Machine Learning) 분야에서 메타학습(Meta-learning)과 뉴럴필드(Neural Field) 분야의 탁월한 연구 성과를 인정받아 선정되었다. 기계학습 분야에서는 총 19명의 학생이 선발되었으며 아시아 대학에서는 탁지훈 학생이 유일하다.
탁지훈 학생은 특히 기존 뉴럴필드 학습의 한계점들을 새로운 메타학습 방법론을 제안하여 효과적으로 극복한 것으로 평가받는다. 구체적으로는 뉴럴필드 학습에서의 세 가지 비효율적 요소인 학습 시간, 학습 메모리 그리고 저장 공간을 효율적인 메타학습을 제안하여 효율화 하였으며, 이를 활용한 데이터 형태에 구애받지 않은 데이터 압축 기술 역시 제안하였다. 이러한 다양한 연구들은 NeurIPS, ICML, ICLR 등 기계학습 및 딥러닝 분야의 최고 학회에 다수 선정되었다. 또한 그는 구글 딥마인드 연구진들과 협력하여 메타학습과 뉴럴필드 연구를 수행한 바 있다.
시상식은 8월 29일부터 8월 30일 양일간 가상으로 열린 구글 PhD 펠로우십 서밋(Google PhD Fellowship Summit)에서 진행됐으며, 수상자 리스트는 구글 홈페이지에 게시되어있다.
구글은 KAIST 교수진과 학생을 대상으로 연구비 지원(Research Grant), 신진 연구자 지원(Research Scholar), 구글 클라우드 플랫폼 크레딧(GCP Credits), 익스플로어CSR(exploreCSR), PhD 펠로우십(PhD Fellowship), 학생 학회 후원(Student Travel Grants) 등 다양한 산학협력 프로그램으로 지원을 제공했다.
(홈페이지 주소 : https://research.google/outreach/phd-fellowship/recipients)
탁지훈 박사과정, 2023 구글 PhD 펠로우 선정
우리 대학 김재철AI대학원 박사과정 탁지훈 학생(지도교수 신진우)이 ‘2023 구글 PhD 펠로우’에 선정됐다.
구글 PhD 펠로우십은 컴퓨터 과학과 관련된 유망 연구 분야에서 우수한 성과를 낸 대학원생을 지원하는 장학 프로그램으로 올해는 전 세계에서 67명이 선발됐다. 선정된 펠로우에게는 1만 달러의 장학금과 구글 각 분야 전문가 멘토와의 일대일 연구 토의, 피드백 등의 혜택이 주어진다.
탁지훈 학생은 기계학습(Machine Learning) 분야에서 메타학습(Meta-learning)과 뉴럴필드(Neural Field) 분야의 탁월한 연구 성과를 인정받아 선정되었다. 기계학습 분야에서는 총 19명의 학생이 선발되었으며 아시아 대학에서는 탁지훈 학생이 유일하다.
탁지훈 학생은 특히 기존 뉴럴필드 학습의 한계점들을 새로운 메타학습 방법론을 제안하여 효과적으로 극복한 것으로 평가받는다. 구체적으로는 뉴럴필드 학습에서의 세 가지 비효율적 요소인 학습 시간, 학습 메모리 그리고 저장 공간을 효율적인 메타학습을 제안하여 효율화 하였으며, 이를 활용한 데이터 형태에 구애받지 않은 데이터 압축 기술 역시 제안하였다. 이러한 다양한 연구들은 NeurIPS, ICML, ICLR 등 기계학습 및 딥러닝 분야의 최고 학회에 다수 선정되었다. 또한 그는 구글 딥마인드 연구진들과 협력하여 메타학습과 뉴럴필드 연구를 수행한 바 있다.
시상식은 8월 29일부터 8월 30일 양일간 가상으로 열린 구글 PhD 펠로우십 서밋(Google PhD Fellowship Summit)에서 진행됐으며, 수상자 리스트는 구글 홈페이지에 게시되어있다.
구글은 KAIST 교수진과 학생을 대상으로 연구비 지원(Research Grant), 신진 연구자 지원(Research Scholar), 구글 클라우드 플랫폼 크레딧(GCP Credits), 익스플로어CSR(exploreCSR), PhD 펠로우십(PhD Fellowship), 학생 학회 후원(Student Travel Grants) 등 다양한 산학협력 프로그램으로 지원을 제공했다.
(홈페이지 주소 : https://research.google/outreach/phd-fellowship/recipients)
2023.10.31
조회수 6937
-
 전산학부 홍승훈 교수 연구팀, ICLR 2023 학술대회 한국인 최초 최우수논문상 수상
우리 대학 전산학부 홍승훈 교수가 이끄는 연구팀이 지난 5월 1일부터 5월 5일에 열린 기계학습 분야의 최우수 국제학술대회인 ‘표현 학습 국제 학회 2023(International Conference on Learning Representation, 이하 ICLR 2023)’에서 최우수논문상 (Outstanding Paper Award)를 수상했다고 5일 밝혔다.
ICLR 2023은 인공지능 분야의 가장 권위 있는 학회 중 하나로서, 구글 스칼라 h-5 인덱스 기준 기계학습 분야의 1위에 올라있으며, 모든 과학 분야의 출판물 중 9위를 기록하고 있다. 올해 최우수논문상은 전체 1,574편의 논문 중 상위 4편에 주어졌다.
홍 교수팀의 ICLR 최우수논문상 수상은 한국인으로서는 최초이며, 주요 기계학습 학회에서 국내 기관이 주축이 되어 진행한 연구로 최우수논문상을 수상한 최초의 사례이기도 하다.
전산학부 김동균 박사과정(제1 저자), 김진우 박사과정, 조성웅 석사과정과 마이크로소프트 리서치 아시아(Microsoft Research Asia)의 총 루오 박사(Chong Lou)로 구성된 홍승훈 교수 연구팀은 컴퓨터 비전 분야의 핵심 연구 주제인 ‘픽셀 레이블링 문제'를 획기적으로 적은 수의 데이터로 광범위하게 해결할 수 있는 범용적 방법론인 비주얼 토큰 매칭(Visual Token Matching) 기법을 제안해 최우수논문상을 받았다.
픽셀 레이블링은 물체 검출, 물체 분할, 자세 추정, 깊이 추정, 3차원 복원 등 컴퓨터 비전 분야의 거의 모든 핵심 문제를 광범위하게 아우르는 개념이다. 최근 10년간 신경망 기반의 기계학습 방법론이 적용되며 픽셀 레이블링의 다양한 세부 문제에서 괄목할만한 진전이 있었으나, 이러한 방법들은 수십만 개 이상의 방대한 학습 데이터를 요구하는 한계가 있었다.
홍승훈 교수 연구팀은 모든 종류의 픽셀 레이블링 문제에 대해 수십 개 이내의 적은 데이터로도 학습과 추론이 가능한 범용적인 퓨샷 학습 기법을 개발했고, 수많은 픽셀 레이블링 문제에서 기존 방법 대비 0.01% 이내의 데이터로도 비슷하거나 우수한 성능을 낼 수 있음을 입증했다.
홍 교수는 이번 연구를 통해 의료 영상과 같이 학습 데이터 수집이 병목이 되는 다양한 도메인에서 컴퓨터 비전 기술을 적용하는데 돌파구가 되기를 기대한다고 평가했다.
이번 연구를 주도한 김동균 박사과정은 적은 수의 데이터로 학습할 수 있는 범용적 기계학습 방법론을 계속 연구해 왔으며, 이번 연구의 이론적 토대가 되는 연구를 지난 ICLR에 출판한 바 있다. 김동균 박사과정은 이번 연구로 삼성 휴먼테크 논문대상에서 은상을 수상하기도 했다.
전산학부 홍승훈 교수는 "상을 받게 되어 영광이고, 이번 수상이 국내 기계학습 연구자들에게 자신감이 되어 한국에서 더 많은 도전적인 연구들이 나오는 데 도움이 된다면 기쁠 것 같다”라고 소감을 밝혔다.
전산학부 홍승훈 교수 연구팀, ICLR 2023 학술대회 한국인 최초 최우수논문상 수상
우리 대학 전산학부 홍승훈 교수가 이끄는 연구팀이 지난 5월 1일부터 5월 5일에 열린 기계학습 분야의 최우수 국제학술대회인 ‘표현 학습 국제 학회 2023(International Conference on Learning Representation, 이하 ICLR 2023)’에서 최우수논문상 (Outstanding Paper Award)를 수상했다고 5일 밝혔다.
ICLR 2023은 인공지능 분야의 가장 권위 있는 학회 중 하나로서, 구글 스칼라 h-5 인덱스 기준 기계학습 분야의 1위에 올라있으며, 모든 과학 분야의 출판물 중 9위를 기록하고 있다. 올해 최우수논문상은 전체 1,574편의 논문 중 상위 4편에 주어졌다.
홍 교수팀의 ICLR 최우수논문상 수상은 한국인으로서는 최초이며, 주요 기계학습 학회에서 국내 기관이 주축이 되어 진행한 연구로 최우수논문상을 수상한 최초의 사례이기도 하다.
전산학부 김동균 박사과정(제1 저자), 김진우 박사과정, 조성웅 석사과정과 마이크로소프트 리서치 아시아(Microsoft Research Asia)의 총 루오 박사(Chong Lou)로 구성된 홍승훈 교수 연구팀은 컴퓨터 비전 분야의 핵심 연구 주제인 ‘픽셀 레이블링 문제'를 획기적으로 적은 수의 데이터로 광범위하게 해결할 수 있는 범용적 방법론인 비주얼 토큰 매칭(Visual Token Matching) 기법을 제안해 최우수논문상을 받았다.
픽셀 레이블링은 물체 검출, 물체 분할, 자세 추정, 깊이 추정, 3차원 복원 등 컴퓨터 비전 분야의 거의 모든 핵심 문제를 광범위하게 아우르는 개념이다. 최근 10년간 신경망 기반의 기계학습 방법론이 적용되며 픽셀 레이블링의 다양한 세부 문제에서 괄목할만한 진전이 있었으나, 이러한 방법들은 수십만 개 이상의 방대한 학습 데이터를 요구하는 한계가 있었다.
홍승훈 교수 연구팀은 모든 종류의 픽셀 레이블링 문제에 대해 수십 개 이내의 적은 데이터로도 학습과 추론이 가능한 범용적인 퓨샷 학습 기법을 개발했고, 수많은 픽셀 레이블링 문제에서 기존 방법 대비 0.01% 이내의 데이터로도 비슷하거나 우수한 성능을 낼 수 있음을 입증했다.
홍 교수는 이번 연구를 통해 의료 영상과 같이 학습 데이터 수집이 병목이 되는 다양한 도메인에서 컴퓨터 비전 기술을 적용하는데 돌파구가 되기를 기대한다고 평가했다.
이번 연구를 주도한 김동균 박사과정은 적은 수의 데이터로 학습할 수 있는 범용적 기계학습 방법론을 계속 연구해 왔으며, 이번 연구의 이론적 토대가 되는 연구를 지난 ICLR에 출판한 바 있다. 김동균 박사과정은 이번 연구로 삼성 휴먼테크 논문대상에서 은상을 수상하기도 했다.
전산학부 홍승훈 교수는 "상을 받게 되어 영광이고, 이번 수상이 국내 기계학습 연구자들에게 자신감이 되어 한국에서 더 많은 도전적인 연구들이 나오는 데 도움이 된다면 기쁠 것 같다”라고 소감을 밝혔다.
2023.05.08
조회수 6986
-
 강수 관측 오차범위 42.5% 줄인 알고리즘 개발
강수량의 정확한 파악은 지구의 물 순환을 이해하고 수자원과 재해 대응을 위해 중요하다. 강수량 추정을 위한 알고리즘에는 다양한 방법들이 제안되어 왔으며, 최근에는 기계학습을 이용한 방법들이 많이 제안되고 있다.
우리 대학 문술미래전략대학원(건설및환경공학과 및 녹색성장지속가능대학원 겸임) 김형준 교수와 도쿄대 등으로 구성된 국제 공동연구팀이 인공위성에 탑재된 마이크로파 라디오미터의 관측값을 이용해 지상 강수량을 추정하는 새로운 기계학습 방법을 제안했다고 25일 밝혔다. 연구팀은 기존의 방법과 비교해 전 강수량에 대해 오차(RMSE)를 최소 15.9%에서 최대 42.5%까지 줄이는 데 성공했다.
단순한 데이터 주도(data-driven)모델은 대량의 훈련 데이터가 필요하고 물리적인 일관성이 보장되지 않으며 결과의 원인 분석이 어렵다는 등의 문제가 있었다. 연구팀은 이번 연구에서 위성 강수량 추정에 대한 분야 지식을 명시적으로 포함함으로써 학습 모델 내의 상호 의존적인 지식 교환을 구현했다. 구체적으로, 멀티태스크 학습(multitask learning)이라는 심층 학습 기법을 사용해 강수 여부를 인식하는 분류 모델과 강수 강도를 추정하는 회귀 모델을 통합하고 동시에 학습시켰다.
이번 연구에서 제안한 기계학습 모델에는 이번에 포함된 메커니즘 외에도 다양한 물리적 메커니즘을 포함할 수 있다. 예를 들어, 비 또는 눈, 진눈깨비 등 강수 종류의 분류 및 상승 기류 또는 층상 구름 유형 등 강수를 일으키는 구름 유형의 분류를 포함함으로써 앞으로 추정의 정확도가 더욱 향상될 것으로 기대된다.
김형준 교수의 이번 연구 결과는 국제 학술지 ‘지구물리 연구 레터(Geophysical Research Letters)’에 지난 4월 16일 출판됐다. (논문명: Multi-Task Learning for Simultaneous Retrievals of Passive Microwave Precipitation Estimates and Rain/No-Rain Classification; doi:10.1029/2022GL102283)
한편 이번 연구는 한국연구재단 해외우수과학자유치사업(BP+)와 정보통신기획평가원 인공지능대학원지원(한국과학기술원)지원을 받아 수행됐다.
강수 관측 오차범위 42.5% 줄인 알고리즘 개발
강수량의 정확한 파악은 지구의 물 순환을 이해하고 수자원과 재해 대응을 위해 중요하다. 강수량 추정을 위한 알고리즘에는 다양한 방법들이 제안되어 왔으며, 최근에는 기계학습을 이용한 방법들이 많이 제안되고 있다.
우리 대학 문술미래전략대학원(건설및환경공학과 및 녹색성장지속가능대학원 겸임) 김형준 교수와 도쿄대 등으로 구성된 국제 공동연구팀이 인공위성에 탑재된 마이크로파 라디오미터의 관측값을 이용해 지상 강수량을 추정하는 새로운 기계학습 방법을 제안했다고 25일 밝혔다. 연구팀은 기존의 방법과 비교해 전 강수량에 대해 오차(RMSE)를 최소 15.9%에서 최대 42.5%까지 줄이는 데 성공했다.
단순한 데이터 주도(data-driven)모델은 대량의 훈련 데이터가 필요하고 물리적인 일관성이 보장되지 않으며 결과의 원인 분석이 어렵다는 등의 문제가 있었다. 연구팀은 이번 연구에서 위성 강수량 추정에 대한 분야 지식을 명시적으로 포함함으로써 학습 모델 내의 상호 의존적인 지식 교환을 구현했다. 구체적으로, 멀티태스크 학습(multitask learning)이라는 심층 학습 기법을 사용해 강수 여부를 인식하는 분류 모델과 강수 강도를 추정하는 회귀 모델을 통합하고 동시에 학습시켰다.
이번 연구에서 제안한 기계학습 모델에는 이번에 포함된 메커니즘 외에도 다양한 물리적 메커니즘을 포함할 수 있다. 예를 들어, 비 또는 눈, 진눈깨비 등 강수 종류의 분류 및 상승 기류 또는 층상 구름 유형 등 강수를 일으키는 구름 유형의 분류를 포함함으로써 앞으로 추정의 정확도가 더욱 향상될 것으로 기대된다.
김형준 교수의 이번 연구 결과는 국제 학술지 ‘지구물리 연구 레터(Geophysical Research Letters)’에 지난 4월 16일 출판됐다. (논문명: Multi-Task Learning for Simultaneous Retrievals of Passive Microwave Precipitation Estimates and Rain/No-Rain Classification; doi:10.1029/2022GL102283)
한편 이번 연구는 한국연구재단 해외우수과학자유치사업(BP+)와 정보통신기획평가원 인공지능대학원지원(한국과학기술원)지원을 받아 수행됐다.
2023.04.25
조회수 8552
-
 드림워커, 안 보고도 계단을 성큼성큼 걷다
연기가 자욱해 앞이 안보이는 재난 상황에서 별도의 시각이나 촉각 센서의 도움 없이 계단을 오르내리고 나무뿌리와 같은 울퉁불퉁한 환경 등에서 넘어지지 않고 움직이는 사족보행 로봇 기술이 국내 연구진에 의해 개발됐다.
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 다양한 비정형 환경에서도 강인한 `블라인드 보행(blind locomotion)'을 가능케 하는 보행 로봇 제어 기술을 개발했다고 29일 밝혔다.
연구팀은 사람이 수면 중 깨어서 깜깜한 상태에서 화장실을 갈 때 시각적인 도움이 거의 없이 보행이 가능한 것처럼, 블라인드 보행이 가능하다고 해서 붙여진 ‘드림워크(DreamWaQ)’기술을 개발하였고 이 기술이 적용된 로봇을 ‘드림워커(DreamWaQer)’라고 명명했다. 즉 이 기술을 탑재하면 다양한 형태의 사족보행 로봇 드림워커를 만들어낼 수 있게 되는 것이다.
기존 보행 로봇 제어기는 기구학 또는 동역학 모델을 기반으로 한다. 이를 모델 기반 제어 방식이라고 표현하는데, 특히 야지와 같은 비정형 환경에서 안정적인 보행을 하기 위해서는 모델의 특징 정보를 더욱 빠르게 얻을 수 있어야 한다. 그러나 이는 주변 환경의 인지 능력에 많이 의존하는 모습을 보여 왔다.
이에 비해, 명현 교수 연구팀이 개발한 인공지능 학습 방법 중 하나인 심층 강화학습 기반의 제어기는 시뮬레이터로부터 얻어진 다양한 환경의 데이터를 통해 보행 로봇의 각 모터에 적절한 제어 명령을 빠르게 계산해 줄 수 있다. 시뮬레이션에서 학습된 제어기가 실제 로봇에서 잘 작동하려면 별도의 튜닝 과정이 필요했다면, 연구팀이 개발한 제어기는 별도의 튜닝을 요구하지 않는다는 장점도 있어 다양한 보행 로봇에 쉽게 적용될 수 있을 것으로 기대된다.
연구팀이 개발한 제어기인 드림워크는 크게 지면과 로봇의 정보를 추정하는 상황(context) 추정 네트워크와 제어 명령을 산출하는 정책(policy) 네트워크로 구성된다. 상황추정 네트워크는 관성 정보와 관절 정보들을 통해 암시적으로 지면의 정보를, 명시적으로 로봇의 상태를 추정한다. 이 정보는 정책 네트워크에 입력돼 최적의 제어 명령을 산출하는 데 사용된다. 두 네트워크는 시뮬레이션에서 함께 학습된다.
상황추정 네트워크는 지도학습을 통해 학습되는 반면, 정책 네트워크는 심층 강화학습 방법론인 행동자-비평자(actor-critic) 방식을 통해 학습된다. 행동자 네트워크는 주변 지형 정보를 오직 암시적으로 추정할 수 있다. 시뮬레이션에서는 주변 지형 정보를 알 수 있는데, 지형 정보를 알고 있는 비평자 네트워크가 행동자 네트워크의 정책을 평가한다.
이 모든 학습 과정에는 단 1시간 정도만 소요되며, 실제 로봇에는 학습된 행동자 네트워크만 탑재된다. 주변 지형을 보지 않고도, 오직 로봇 내부의 관성 센서(IMU)와 관절 각도의 측정치를 활용해 시뮬레이션에서 학습한 다양한 환경 중 어느 환경과 유사한지 상상하는 과정을 거친다. 갑자기 계단과 같은 단차를 맞이하는 경우, 발이 단차에 닿기 전까지는 알 수 없지만 발이 닿는 순간 빠르게 지형 정보를 상상한다. 그리고 이렇게 추측된 지형 정보에 알맞은 제어 명령을 각 모터에 전달해 재빠른 적응 보행이 가능하다.
드림워커(DreamWaQer) 로봇은 실험실 환경뿐 아니라, 연석과 과속방지턱이 많은 대학 캠퍼스 환경, 나무뿌리와 자갈이 많은 야지 환경 등에서 보행 시 지면으로부터 몸체까지 높이의 3분의 2 (2/3) 정도의 계단 등을 극복함으로써 강인한 성능을 입증했다. 또한 환경과 무관하게, 0.3m/s의 느린 속도부터 1.0m/s의 다소 빠른 속도까지도 안정적인 보행이 가능함을 연구팀은 확인했다.
이번 연구 결과는 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정이 제1 저자로, 유병호 박사과정이 공동 저자로 참여했으며, 오는 5월 말 영국 런던에서 개최되는 로보틱스 분야의 세계 최고 권위 학회인 ICRA(IEEE International Conference on Robotics and Automation)에 채택되어 발표될 예정이다. (논문명: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning)
개발된 드림워크를 탑재한 보행 로봇 드림워커의 구동 및 보행 영상은 아래 주소에서 확인할 수 있다.
메인 영상: https://youtu.be/JC1_bnTxPiQ
쿠키 영상: https://youtu.be/mhUUZVbeDA0
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행되었다. (과제명: 동적, 비정형 환경에서의 보행 로봇의 자율이동을 위한 이동지능 SW 개발 및 실현장 적용)
드림워커, 안 보고도 계단을 성큼성큼 걷다
연기가 자욱해 앞이 안보이는 재난 상황에서 별도의 시각이나 촉각 센서의 도움 없이 계단을 오르내리고 나무뿌리와 같은 울퉁불퉁한 환경 등에서 넘어지지 않고 움직이는 사족보행 로봇 기술이 국내 연구진에 의해 개발됐다.
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 다양한 비정형 환경에서도 강인한 `블라인드 보행(blind locomotion)'을 가능케 하는 보행 로봇 제어 기술을 개발했다고 29일 밝혔다.
연구팀은 사람이 수면 중 깨어서 깜깜한 상태에서 화장실을 갈 때 시각적인 도움이 거의 없이 보행이 가능한 것처럼, 블라인드 보행이 가능하다고 해서 붙여진 ‘드림워크(DreamWaQ)’기술을 개발하였고 이 기술이 적용된 로봇을 ‘드림워커(DreamWaQer)’라고 명명했다. 즉 이 기술을 탑재하면 다양한 형태의 사족보행 로봇 드림워커를 만들어낼 수 있게 되는 것이다.
기존 보행 로봇 제어기는 기구학 또는 동역학 모델을 기반으로 한다. 이를 모델 기반 제어 방식이라고 표현하는데, 특히 야지와 같은 비정형 환경에서 안정적인 보행을 하기 위해서는 모델의 특징 정보를 더욱 빠르게 얻을 수 있어야 한다. 그러나 이는 주변 환경의 인지 능력에 많이 의존하는 모습을 보여 왔다.
이에 비해, 명현 교수 연구팀이 개발한 인공지능 학습 방법 중 하나인 심층 강화학습 기반의 제어기는 시뮬레이터로부터 얻어진 다양한 환경의 데이터를 통해 보행 로봇의 각 모터에 적절한 제어 명령을 빠르게 계산해 줄 수 있다. 시뮬레이션에서 학습된 제어기가 실제 로봇에서 잘 작동하려면 별도의 튜닝 과정이 필요했다면, 연구팀이 개발한 제어기는 별도의 튜닝을 요구하지 않는다는 장점도 있어 다양한 보행 로봇에 쉽게 적용될 수 있을 것으로 기대된다.
연구팀이 개발한 제어기인 드림워크는 크게 지면과 로봇의 정보를 추정하는 상황(context) 추정 네트워크와 제어 명령을 산출하는 정책(policy) 네트워크로 구성된다. 상황추정 네트워크는 관성 정보와 관절 정보들을 통해 암시적으로 지면의 정보를, 명시적으로 로봇의 상태를 추정한다. 이 정보는 정책 네트워크에 입력돼 최적의 제어 명령을 산출하는 데 사용된다. 두 네트워크는 시뮬레이션에서 함께 학습된다.
상황추정 네트워크는 지도학습을 통해 학습되는 반면, 정책 네트워크는 심층 강화학습 방법론인 행동자-비평자(actor-critic) 방식을 통해 학습된다. 행동자 네트워크는 주변 지형 정보를 오직 암시적으로 추정할 수 있다. 시뮬레이션에서는 주변 지형 정보를 알 수 있는데, 지형 정보를 알고 있는 비평자 네트워크가 행동자 네트워크의 정책을 평가한다.
이 모든 학습 과정에는 단 1시간 정도만 소요되며, 실제 로봇에는 학습된 행동자 네트워크만 탑재된다. 주변 지형을 보지 않고도, 오직 로봇 내부의 관성 센서(IMU)와 관절 각도의 측정치를 활용해 시뮬레이션에서 학습한 다양한 환경 중 어느 환경과 유사한지 상상하는 과정을 거친다. 갑자기 계단과 같은 단차를 맞이하는 경우, 발이 단차에 닿기 전까지는 알 수 없지만 발이 닿는 순간 빠르게 지형 정보를 상상한다. 그리고 이렇게 추측된 지형 정보에 알맞은 제어 명령을 각 모터에 전달해 재빠른 적응 보행이 가능하다.
드림워커(DreamWaQer) 로봇은 실험실 환경뿐 아니라, 연석과 과속방지턱이 많은 대학 캠퍼스 환경, 나무뿌리와 자갈이 많은 야지 환경 등에서 보행 시 지면으로부터 몸체까지 높이의 3분의 2 (2/3) 정도의 계단 등을 극복함으로써 강인한 성능을 입증했다. 또한 환경과 무관하게, 0.3m/s의 느린 속도부터 1.0m/s의 다소 빠른 속도까지도 안정적인 보행이 가능함을 연구팀은 확인했다.
이번 연구 결과는 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정이 제1 저자로, 유병호 박사과정이 공동 저자로 참여했으며, 오는 5월 말 영국 런던에서 개최되는 로보틱스 분야의 세계 최고 권위 학회인 ICRA(IEEE International Conference on Robotics and Automation)에 채택되어 발표될 예정이다. (논문명: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning)
개발된 드림워크를 탑재한 보행 로봇 드림워커의 구동 및 보행 영상은 아래 주소에서 확인할 수 있다.
메인 영상: https://youtu.be/JC1_bnTxPiQ
쿠키 영상: https://youtu.be/mhUUZVbeDA0
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행되었다. (과제명: 동적, 비정형 환경에서의 보행 로봇의 자율이동을 위한 이동지능 SW 개발 및 실현장 적용)
2023.03.29
조회수 10841
-
 ‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26
조회수 9830
-
 KAIST 우수수업 수기 공모전 시상식 개최
우리 대학이 지난 10월 14일 '2022 KAIST 우수수업 수기 공모전' 시상식을 개최했다.
우리 대학의 좋은 수업을 발굴해 학내 구성원들에게 공유하기 위해 '내가 추천하는 우리 학교 우수강의'를 주제로 시행된 이번 공모에는 총 28개의 수상작이 선정됐다.
금상은 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim)학생이 차지했다. '수강취소하고 싶었지만 가장 좋아하는 수업이 된 강의'라는 제목의 수기를 작성해 전산학부 문은영 교수의 데이터 구조 수업을 추천했다.
또한, 생명과학과 박규병 학생의 'KAIST 학생들이여, 연구실에서 나와 이 수업을 들으라(디지털인문사회과학부 문정인 교수/사회과학특강 <미중 전략 경쟁과 한반도- 한국의 선택>)'와 새내기과정학부 조휘인 학생의 '모래성 그리고 파도(수리과학과 김동수 교수/데이터과학을 위한 선형대수학)', 문화기술대학원 타티아나 치비소바(Tatiana Chibisova) 학생의 '음악, 과학, 그리고 러버덕(멀티미디어 음향기술/문화과학기술대학 남주한 교수)'이 은상을 받았다. 이 외에도 동상 6건과 참가상 18건이 선정되어 교수학습혁신센터장 명의 상장과 상금이 수여됐다.
금상을 수상한 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim) 학생은 "100% 온라인으로 진행된 수업임에도 불구하고 체계적인 수업 구성과 과제 피드백을 통해 성취감을 느낄 수 있었다"고 말했다.
석현정 KAIST 교육원장은 "우수강의 수기공모전에 참여해준 모든 학생들에게 감사드린다"고 전하며, "추천한 강의의 수업전략과 평가방법, 학생태도 등의 변화를 세세하게 작성해주어서 교내 구성원들과 우수수업사례를 공유할 수 있는 좋은 기회가 되었다"라고 덧붙였다.
교수학습혁신센터는 이번 공모전 수상작의 수기를 수기집으로 제작하고, 교내에 배포해 좋은 수업 사례를 공유하고 확산하는 데 적극적으로 활용할 계획이다.
<수상자 및 수기명>
∘금상 - 추천 수업: 데이터 구조, 전산학부 문은영 교수 - 수상작: 수강취소하고 싶었지만 가장 좋아하는 수업이 된 강의 (A Class Becoming My Favorite which I Once Wanted to Get Rid Off) - 수상자: 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim)
∘은상 - 추천 수업: 사회과학특강<미중 전략 경쟁과 한반도- 한국의 선택>, 디지털인문사회과학부 문정인 교수 - 수상작: 카이스트 학생들이여, 연구실에서 나와 이 수업을 들으라 - 수상자: 생명과학과 박규병 - 추천 수업: 데이터과학을 위한 선형대수학, 수리과학과 김동수 교수 - 수상작: 모래성 그리고 파도 - 수상자: 새내기과정학부 조휘인 - 추천 수업: 멀티미디어 음향기술, 문화기술대학원 남주한 교수 - 수상작: 음악, 과학, 그리고 러버덕(Music, Science and Rubber Duck) - 수상자: 문화기술대학원 타티아나 치비소바(Tatiana Chibisova)
∘동상 - 추천 수업: 산업공학의 특수논제 I <지속가능 사회를 위한 스마트 모빌리티>, 산업및시스템공학과 여화수, 이진우, 김하나 교수 - 수상작: 새롭고 혁신적인 수업의 3개의 멋진 부분들(Three brilliant minds in an innovative new class) - 수상자: 조천식모빌리티대학원 에릭 페르난도 가르시아 자무디오(Erick Fernando Garcia Zamudio) - 추천 수업: 실험중심의 체감형 물리학, 물리학과 조성재 교수 - 수상작: 나만의 '토끼'를 찾고, 스스로 오게 하자 - 수상자: 새내기과정학부 강원일 - 추천 수업: 전산열유체공학, 기계공학과 김현진 교수 - 수상작: 전화위복, 코로나가 준 새로운 방편들 - 수상자: 기계공학과 권진호 - 추천 수업: 신경과학 방법론, 바이오및뇌공학과 박영균 교수 - 수상작: 신경과학 방법론 수업의 4가지 특별한 점(Four Unique Traits About ‘Methods in Neuroscience) - 수상자: 바이오및뇌공학과 김민주 - 추천 수업: 계산사회과학, 디지털인문사회과학부 김란우 교수 - 수상작: 계산사회과학-내 삶에 오래 기억되는 수업(Computational Social Science - A Course to Last a Lifetime) - 수상자: 전산학부 메이더 아이자즈(Maida Aizaz) - 추천 수업: 증강현실, 문화기술학 부전공 프로그램 윤상호 교수 - 수상작: 과정 및 결과, 두 마리 토끼를 잡다 - 수상자: 문화기술대학원 이승언
KAIST 우수수업 수기 공모전 시상식 개최
우리 대학이 지난 10월 14일 '2022 KAIST 우수수업 수기 공모전' 시상식을 개최했다.
우리 대학의 좋은 수업을 발굴해 학내 구성원들에게 공유하기 위해 '내가 추천하는 우리 학교 우수강의'를 주제로 시행된 이번 공모에는 총 28개의 수상작이 선정됐다.
금상은 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim)학생이 차지했다. '수강취소하고 싶었지만 가장 좋아하는 수업이 된 강의'라는 제목의 수기를 작성해 전산학부 문은영 교수의 데이터 구조 수업을 추천했다.
또한, 생명과학과 박규병 학생의 'KAIST 학생들이여, 연구실에서 나와 이 수업을 들으라(디지털인문사회과학부 문정인 교수/사회과학특강 <미중 전략 경쟁과 한반도- 한국의 선택>)'와 새내기과정학부 조휘인 학생의 '모래성 그리고 파도(수리과학과 김동수 교수/데이터과학을 위한 선형대수학)', 문화기술대학원 타티아나 치비소바(Tatiana Chibisova) 학생의 '음악, 과학, 그리고 러버덕(멀티미디어 음향기술/문화과학기술대학 남주한 교수)'이 은상을 받았다. 이 외에도 동상 6건과 참가상 18건이 선정되어 교수학습혁신센터장 명의 상장과 상금이 수여됐다.
금상을 수상한 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim) 학생은 "100% 온라인으로 진행된 수업임에도 불구하고 체계적인 수업 구성과 과제 피드백을 통해 성취감을 느낄 수 있었다"고 말했다.
석현정 KAIST 교육원장은 "우수강의 수기공모전에 참여해준 모든 학생들에게 감사드린다"고 전하며, "추천한 강의의 수업전략과 평가방법, 학생태도 등의 변화를 세세하게 작성해주어서 교내 구성원들과 우수수업사례를 공유할 수 있는 좋은 기회가 되었다"라고 덧붙였다.
교수학습혁신센터는 이번 공모전 수상작의 수기를 수기집으로 제작하고, 교내에 배포해 좋은 수업 사례를 공유하고 확산하는 데 적극적으로 활용할 계획이다.
<수상자 및 수기명>
∘금상 - 추천 수업: 데이터 구조, 전산학부 문은영 교수 - 수상작: 수강취소하고 싶었지만 가장 좋아하는 수업이 된 강의 (A Class Becoming My Favorite which I Once Wanted to Get Rid Off) - 수상자: 전산학부 민하주르 라흐만 차우두리 마힘(Minhajur Rahman Chowdhury Mahim)
∘은상 - 추천 수업: 사회과학특강<미중 전략 경쟁과 한반도- 한국의 선택>, 디지털인문사회과학부 문정인 교수 - 수상작: 카이스트 학생들이여, 연구실에서 나와 이 수업을 들으라 - 수상자: 생명과학과 박규병 - 추천 수업: 데이터과학을 위한 선형대수학, 수리과학과 김동수 교수 - 수상작: 모래성 그리고 파도 - 수상자: 새내기과정학부 조휘인 - 추천 수업: 멀티미디어 음향기술, 문화기술대학원 남주한 교수 - 수상작: 음악, 과학, 그리고 러버덕(Music, Science and Rubber Duck) - 수상자: 문화기술대학원 타티아나 치비소바(Tatiana Chibisova)
∘동상 - 추천 수업: 산업공학의 특수논제 I <지속가능 사회를 위한 스마트 모빌리티>, 산업및시스템공학과 여화수, 이진우, 김하나 교수 - 수상작: 새롭고 혁신적인 수업의 3개의 멋진 부분들(Three brilliant minds in an innovative new class) - 수상자: 조천식모빌리티대학원 에릭 페르난도 가르시아 자무디오(Erick Fernando Garcia Zamudio) - 추천 수업: 실험중심의 체감형 물리학, 물리학과 조성재 교수 - 수상작: 나만의 '토끼'를 찾고, 스스로 오게 하자 - 수상자: 새내기과정학부 강원일 - 추천 수업: 전산열유체공학, 기계공학과 김현진 교수 - 수상작: 전화위복, 코로나가 준 새로운 방편들 - 수상자: 기계공학과 권진호 - 추천 수업: 신경과학 방법론, 바이오및뇌공학과 박영균 교수 - 수상작: 신경과학 방법론 수업의 4가지 특별한 점(Four Unique Traits About ‘Methods in Neuroscience) - 수상자: 바이오및뇌공학과 김민주 - 추천 수업: 계산사회과학, 디지털인문사회과학부 김란우 교수 - 수상작: 계산사회과학-내 삶에 오래 기억되는 수업(Computational Social Science - A Course to Last a Lifetime) - 수상자: 전산학부 메이더 아이자즈(Maida Aizaz) - 추천 수업: 증강현실, 문화기술학 부전공 프로그램 윤상호 교수 - 수상작: 과정 및 결과, 두 마리 토끼를 잡다 - 수상자: 문화기술대학원 이승언
2022.11.09
조회수 8950
-
 레이블 없이 훈련 가능한 그래프 신경망 모델 기술 개발
최근 다양한 분야 (소셜 네트워크 분석, 추천시스템 등)에서 그래프 데이터 (그림 1) 의 중요성이 대두되고 있으며, 이에 따라 그래프 신경망(Graph Neural Network) 기술을 활용한 서비스가 급속히 증가하고 있다. 서비스 구축을 위해서는 심층 학습 모델을 훈련해야 하며, 이를 위해서는 충분한 훈련 데이터를 준비해야 한다. 특히 훈련 데이터에 정답지를 만드는 레이블링(labeling) 과정이 필요한데 (예를 들어, 소셜 네트워크의 특정 사용자에 `20대'라는 레이블을 부여하는 행위), 이 과정은 일반적으로 수작업으로 진행되므로 노동력과 시간이 소요된다. 따라서 그래프 신경망 모델 훈련 시 데이터가 충분하지 않은 상황을 효과적으로 타개하는 방법의 필요성이 대두되고 있다.
우리 대학 산업및시스템공학과 박찬영 교수 연구팀이 데이터의 레이블이 없는 상황에서도 높은 예측 정확도를 달성할 수 있는 새로운 그래프 신경망 모델 훈련 기술을 개발했다고 25일 밝혔다.
정점의 레이블이 없는 상황에서 그래프 신경망 모델의 훈련은 데이터 증강을 통해 생성된 정점들의 공통된 특성을 학습하는 과정으로 볼 수 있다. 하지만 이러한 정점의 공통된 특성을 학습하는 과정에서, 기존 훈련 방법은 표상 공간에서 자신을 제외한 다른 정점들과의 유사도가 작아지도록 훈련을 한다. 하지만 그래프 데이터가 정점들 사이의 관계를 나타내는 데이터 구조라는 점을 고려했을 때, 이런 일차원적인 방법론은 정점 간의 관계를 정확히 반영하지 못하게 된다.
박 교수팀이 개발한 기술은 그래프 신경망 모델에서 정점들 사이의 관계를 보존해 정점의 레이블이 없는 상황에서 모델을 훈련시켜 높은 예측 정확도를 달성할 수 있게 해준다.
KAIST 산업및시스템공학과 이남경 석사과정이 제1 저자, 현동민 박사, 이준석 석사과정 학생이 제2, 제3 저자로 참여한 이번 연구는 최고권위 국제학술대회 `정보지식관리 콘퍼런스(CIKM) 2022'에서 올 10월 발표될 예정이다. (논문명: Relational Self-Supervised Learning on Graphs)
기존 연구에서는 정점의 레이블이 없는 상황에서 정점에 대한 표상을 훈련하기 위해 표상 공간 내에서 자기 자신을 제외한 다른 정점들과의 유사도가 작아지도록 훈련을 한다. 예를 들어서, 소셜 네트워크에 A, B, C 라는 사용자가 존재할 때, A, B와 C가 표상 공간에서 서로 간의 유사도가 모두 작아지도록 모델을 훈련하는 것이다. 이때 박 교수팀이 착안한 점은 그래프 데이터가 정점 간의 관계를 나타내는 데이터이므로 정점 간의 관계를 포착하도록 정점의 표상을 훈련할 필요가 있다는 점이었다.
즉, A, B와 C 서로 간의 유사도가 모두 작아지게 하는 훈련 메커니즘과는 달리, 실제 그래프상에서는 이들이 연관이 있을 수 있다는 점이다. 따라서 A, B와 C 사이의 관계를 긍정/부정의 이진 분류를 통해 표상 공간에서 유사도가 작아지도록 훈련을 하는 것이 아닌, 이들의 관계를 정의해 그 관계를 보존하도록 학습하는 모델을 연구팀은 개발했다(그림 2). 연구팀은 정점 간의 관계를 기반으로 정점의 표상을 훈련함으로써, 기존 연구가 갖는 엄격한 규제들을 완화해 그래프 데이터를 더 유연하게 모델링했다.
연구팀은 이 학습 방법론을 `관계 보존 학습'이라고 명명했으며, 그래프 데이터 분석의 주요 문제(정점 분류, 간선 예측)에 적용했다(그림 3). 그 결과 최신 연구 방법론과 비교했을 때, 정점 분류 문제에서 최대 3% 예측 정확도를 향상했고, 간선 예측 문제에서 6%의 성능 향상, 다중 연결 네트워크 (Multiplex network)의 정점 분류 문제에서 3%의 성능 향상을 보였다.
제1 저자인 이남경 석사과정은 "이번 기술은 데이터의 레이블이 부재한 상황에서도 그래프 신경망을 학습할 수 있는 새로운 방법ˮ 이라면서 "그래프 기반의 데이터뿐만이 아닌 이미지 텍스트 음성 데이터 등에 폭넓게 적용될 수 있어, 심층 학습 전반적인 성능 개선에 기여할 수 있다ˮ고 밝혔다.
연구팀을 지도한 박찬영 교수도 "이번 기술은 그래프 데이터상에 레이블이 부재한 상황에서 표상 학습 모델을 훈련하는 기존 모델들의 단점들을 `관계 보존`이라는 개념을 통해 보완해 새로운 학습 패러다임을 제시하여 학계에 큰 파급효과를 낼 수 있다ˮ라고 말했다.
한편, 이번 연구는 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 사람중심인공지능핵심원천기술개발 과제로 개발한 연구성과 결과물(No. 2022-0-00157, 강건하고 공정하며 확장 가능한 데이터 중심의 연속 학습)이다.
레이블 없이 훈련 가능한 그래프 신경망 모델 기술 개발
최근 다양한 분야 (소셜 네트워크 분석, 추천시스템 등)에서 그래프 데이터 (그림 1) 의 중요성이 대두되고 있으며, 이에 따라 그래프 신경망(Graph Neural Network) 기술을 활용한 서비스가 급속히 증가하고 있다. 서비스 구축을 위해서는 심층 학습 모델을 훈련해야 하며, 이를 위해서는 충분한 훈련 데이터를 준비해야 한다. 특히 훈련 데이터에 정답지를 만드는 레이블링(labeling) 과정이 필요한데 (예를 들어, 소셜 네트워크의 특정 사용자에 `20대'라는 레이블을 부여하는 행위), 이 과정은 일반적으로 수작업으로 진행되므로 노동력과 시간이 소요된다. 따라서 그래프 신경망 모델 훈련 시 데이터가 충분하지 않은 상황을 효과적으로 타개하는 방법의 필요성이 대두되고 있다.
우리 대학 산업및시스템공학과 박찬영 교수 연구팀이 데이터의 레이블이 없는 상황에서도 높은 예측 정확도를 달성할 수 있는 새로운 그래프 신경망 모델 훈련 기술을 개발했다고 25일 밝혔다.
정점의 레이블이 없는 상황에서 그래프 신경망 모델의 훈련은 데이터 증강을 통해 생성된 정점들의 공통된 특성을 학습하는 과정으로 볼 수 있다. 하지만 이러한 정점의 공통된 특성을 학습하는 과정에서, 기존 훈련 방법은 표상 공간에서 자신을 제외한 다른 정점들과의 유사도가 작아지도록 훈련을 한다. 하지만 그래프 데이터가 정점들 사이의 관계를 나타내는 데이터 구조라는 점을 고려했을 때, 이런 일차원적인 방법론은 정점 간의 관계를 정확히 반영하지 못하게 된다.
박 교수팀이 개발한 기술은 그래프 신경망 모델에서 정점들 사이의 관계를 보존해 정점의 레이블이 없는 상황에서 모델을 훈련시켜 높은 예측 정확도를 달성할 수 있게 해준다.
KAIST 산업및시스템공학과 이남경 석사과정이 제1 저자, 현동민 박사, 이준석 석사과정 학생이 제2, 제3 저자로 참여한 이번 연구는 최고권위 국제학술대회 `정보지식관리 콘퍼런스(CIKM) 2022'에서 올 10월 발표될 예정이다. (논문명: Relational Self-Supervised Learning on Graphs)
기존 연구에서는 정점의 레이블이 없는 상황에서 정점에 대한 표상을 훈련하기 위해 표상 공간 내에서 자기 자신을 제외한 다른 정점들과의 유사도가 작아지도록 훈련을 한다. 예를 들어서, 소셜 네트워크에 A, B, C 라는 사용자가 존재할 때, A, B와 C가 표상 공간에서 서로 간의 유사도가 모두 작아지도록 모델을 훈련하는 것이다. 이때 박 교수팀이 착안한 점은 그래프 데이터가 정점 간의 관계를 나타내는 데이터이므로 정점 간의 관계를 포착하도록 정점의 표상을 훈련할 필요가 있다는 점이었다.
즉, A, B와 C 서로 간의 유사도가 모두 작아지게 하는 훈련 메커니즘과는 달리, 실제 그래프상에서는 이들이 연관이 있을 수 있다는 점이다. 따라서 A, B와 C 사이의 관계를 긍정/부정의 이진 분류를 통해 표상 공간에서 유사도가 작아지도록 훈련을 하는 것이 아닌, 이들의 관계를 정의해 그 관계를 보존하도록 학습하는 모델을 연구팀은 개발했다(그림 2). 연구팀은 정점 간의 관계를 기반으로 정점의 표상을 훈련함으로써, 기존 연구가 갖는 엄격한 규제들을 완화해 그래프 데이터를 더 유연하게 모델링했다.
연구팀은 이 학습 방법론을 `관계 보존 학습'이라고 명명했으며, 그래프 데이터 분석의 주요 문제(정점 분류, 간선 예측)에 적용했다(그림 3). 그 결과 최신 연구 방법론과 비교했을 때, 정점 분류 문제에서 최대 3% 예측 정확도를 향상했고, 간선 예측 문제에서 6%의 성능 향상, 다중 연결 네트워크 (Multiplex network)의 정점 분류 문제에서 3%의 성능 향상을 보였다.
제1 저자인 이남경 석사과정은 "이번 기술은 데이터의 레이블이 부재한 상황에서도 그래프 신경망을 학습할 수 있는 새로운 방법ˮ 이라면서 "그래프 기반의 데이터뿐만이 아닌 이미지 텍스트 음성 데이터 등에 폭넓게 적용될 수 있어, 심층 학습 전반적인 성능 개선에 기여할 수 있다ˮ고 밝혔다.
연구팀을 지도한 박찬영 교수도 "이번 기술은 그래프 데이터상에 레이블이 부재한 상황에서 표상 학습 모델을 훈련하는 기존 모델들의 단점들을 `관계 보존`이라는 개념을 통해 보완해 새로운 학습 패러다임을 제시하여 학계에 큰 파급효과를 낼 수 있다ˮ라고 말했다.
한편, 이번 연구는 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 사람중심인공지능핵심원천기술개발 과제로 개발한 연구성과 결과물(No. 2022-0-00157, 강건하고 공정하며 확장 가능한 데이터 중심의 연속 학습)이다.
2022.10.25
조회수 8338
-
 상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
2022.10.24
조회수 10549
-
 인공지능 심층 학습(딥러닝) 서비스 구축 비용 최소화 가능한 데이터 정제 기술 개발
최근 다양한 분야에서 인공지능 심층 학습(딥러닝) 기술을 활용한 서비스가 급속히 증가하고 있다. 서비스 구축을 위해서 인공지능은 심층신경망을 훈련해야 하며, 이를 위해서는 충분한 훈련 데이터를 준비해야 한다. 특히 훈련 데이터에 정답지를 만드는 레이블링(labeling) 과정이 필요한데 (예를 들어, 고양이 사진에 `고양이'라고 정답을 적어줌), 이 과정은 일반적으로 수작업으로 진행되므로 엄청난 노동력과 시간적 비용이 소요된다. 따라서 훈련 데이터 구축 비용을 최소화하는 방법 개발이 요구되고 있다.
우리 대학 전산학부 이재길 교수 연구팀이 심층 학습 훈련 데이터 구축 비용을 최소화할 수 있는 새로운 데이터 동시 정제 및 선택 기술을 개발했다고 12일 밝혔다.
일반적으로 심층 학습용 훈련 데이터 구축 과정은 수집, 정제, 선택 및 레이블링 단계로 이뤄진다. 수집 단계에서는 웹, 카메라, 센서 등으로부터 대용량의 데이터가 정제되지 않은 채로 수집된다. 따라서 수집된 데이터에는 목표 서비스와 관련이 없어서 주어진 레이블에 해당하지 않는 분포 외(out-of-distribution) 데이터가 포함된다 (예를 들어, 동물 사진을 수집할 때 재규어 `자동차'가 포함됨). 이러한 분포 외 데이터는 데이터 정제 단계에서 정제돼야 한다. 모든 정제된 데이터에 정답지를 만들기 위해서는 막대한 비용이 소모되는데, 이를 최소화하기 위해 심층 학습 성능 향상에 가장 도움이 되는 훈련 데이터를 먼저 선택해 레이블링하는 능동 학습(active learning)이 큰 주목을 받고 있다. 그러나 정제와 레이블링을 별도로 진행하는 것은 데이터 검사 측면에서 중복적인 비용을 초래한다. 또한 아직 정제되지 않고 남아 있는 분포 외 데이터가 레이블링 단계에서 선택된다면 레이블링 노력을 낭비할 수 있다.
이재길 교수팀이 개발한 기술은 훈련 데이터 구축 단계에서 데이터의 정제 및 선택을 동시에 수행해 심층 학습용 훈련 데이터 구축 비용을 최소화할 수 있도록 해준다.
우리 대학 데이터사이언스대학원에 재학 중인 박동민 박사과정 학생이 제1 저자, 신유주 박사과정, 이영준 박사과정 학생이 제2, 제4 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2022'에서 올 12월 발표될 예정이다. (논문명 : Meta-Query-Net: Resolving Purity-Informativeness Dilemma in Open-set Active Learning)
데이터의 정제 및 선택을 동시에 고려하기 위해서 구체적으로 가장 분포 외 데이터가 아닐 것 같은 데이터 중에서 가장 심층 학습 성능 향상에 도움이 될 데이터를 선택한다. 즉, 주어진 훈련 데이터 구축 비용 내에서 최고의 효과를 내도록 데이터의 순도(purity) 지표와 정보도(informativeness) 지표의 최적 균형(trade-off)을 찾는다. 순도와 정보도는 일반적으로 서로 상충하므로 최적 균형을 찾는 것이 간단하지 않다. 이 교수팀은 이러한 최적 균형이 정제 전 데이터의 분포 외 데이터 비율과 현재 심층신경망 훈련 정도에 따라 달라진다는 점을 발견했다.
이 교수팀은 이러한 최적 균형을 찾아내기 위해 추가적인 작은 신경망 모델을 도입했다. 연구팀은 추가된 모델을 훈련하기 위해 능동 학습에서 여러 단계에 걸쳐 데이터를 선별하는 과정을 활용했다. 즉, 새롭게 선택돼 레이블링 된 데이터를 순도-정보도 최적 균형을 찾기 위한 훈련 데이터로 활용했고, 레이블이 추가될 때마다 최적 균형을 갱신했다. 이러한 방법은 목표 심층신경망의 성능 향상을 위해 추가적인 상위 레벨의 신경망을 사용하였다는 점에서 메타학습(meta-learning)의 일종이라 볼 수 있다.
연구팀은 이 메타학습 방법론을 `메타 질의 네트워크'라고 이름 붙이고 이미지 분류 문제에 대해 다양한 데이터와 광범위한 분포 외 데이터 비율에 걸쳐 방법론을 검증했다. 그 결과, 기존 최신 방법론과 비교했을 때 최대 20% 향상된 최종 예측 정확도를 향상했고, 모든 범위의 분포 외 데이터 비율에서 일관되게 최고 성능을 보였다. 또한, `메타 질의 네트워크'의 최적 균형 분석을 통해, 분포 외 데이터의 비율이 낮고 현재 심층신경망의 성능이 높을수록 정보도에 높은 가중치를 둬야 함을 연구팀은 밝혀냈다.
제1 저자인 박동민 박사과정 학생은 "이번 기술은 실세계 능동 학습에서의 순도-정보도 딜레마를 발견하고 해결한 획기적인 방법ˮ 이라면서 "다양한 데이터 분포 상황에서의 강건성이 검증됐기 때문에, 실생활의 기계 학습 문제에 폭넓게 적용될 수 있어 전반적인 심층 학습의 훈련 데이터 준비 비용 절감에 기여할 것ˮ 이라고 밝혔다.
연구팀을 지도한 이재길 교수도 "이 기술이 텐서플로우(TensorFlow) 혹은 파이토치(PyTorch)와 같은 기존의 심층 학습 라이브러리에 추가되면 기계 학습 및 심층 학습 학계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(2020-0-00862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
인공지능 심층 학습(딥러닝) 서비스 구축 비용 최소화 가능한 데이터 정제 기술 개발
최근 다양한 분야에서 인공지능 심층 학습(딥러닝) 기술을 활용한 서비스가 급속히 증가하고 있다. 서비스 구축을 위해서 인공지능은 심층신경망을 훈련해야 하며, 이를 위해서는 충분한 훈련 데이터를 준비해야 한다. 특히 훈련 데이터에 정답지를 만드는 레이블링(labeling) 과정이 필요한데 (예를 들어, 고양이 사진에 `고양이'라고 정답을 적어줌), 이 과정은 일반적으로 수작업으로 진행되므로 엄청난 노동력과 시간적 비용이 소요된다. 따라서 훈련 데이터 구축 비용을 최소화하는 방법 개발이 요구되고 있다.
우리 대학 전산학부 이재길 교수 연구팀이 심층 학습 훈련 데이터 구축 비용을 최소화할 수 있는 새로운 데이터 동시 정제 및 선택 기술을 개발했다고 12일 밝혔다.
일반적으로 심층 학습용 훈련 데이터 구축 과정은 수집, 정제, 선택 및 레이블링 단계로 이뤄진다. 수집 단계에서는 웹, 카메라, 센서 등으로부터 대용량의 데이터가 정제되지 않은 채로 수집된다. 따라서 수집된 데이터에는 목표 서비스와 관련이 없어서 주어진 레이블에 해당하지 않는 분포 외(out-of-distribution) 데이터가 포함된다 (예를 들어, 동물 사진을 수집할 때 재규어 `자동차'가 포함됨). 이러한 분포 외 데이터는 데이터 정제 단계에서 정제돼야 한다. 모든 정제된 데이터에 정답지를 만들기 위해서는 막대한 비용이 소모되는데, 이를 최소화하기 위해 심층 학습 성능 향상에 가장 도움이 되는 훈련 데이터를 먼저 선택해 레이블링하는 능동 학습(active learning)이 큰 주목을 받고 있다. 그러나 정제와 레이블링을 별도로 진행하는 것은 데이터 검사 측면에서 중복적인 비용을 초래한다. 또한 아직 정제되지 않고 남아 있는 분포 외 데이터가 레이블링 단계에서 선택된다면 레이블링 노력을 낭비할 수 있다.
이재길 교수팀이 개발한 기술은 훈련 데이터 구축 단계에서 데이터의 정제 및 선택을 동시에 수행해 심층 학습용 훈련 데이터 구축 비용을 최소화할 수 있도록 해준다.
우리 대학 데이터사이언스대학원에 재학 중인 박동민 박사과정 학생이 제1 저자, 신유주 박사과정, 이영준 박사과정 학생이 제2, 제4 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2022'에서 올 12월 발표될 예정이다. (논문명 : Meta-Query-Net: Resolving Purity-Informativeness Dilemma in Open-set Active Learning)
데이터의 정제 및 선택을 동시에 고려하기 위해서 구체적으로 가장 분포 외 데이터가 아닐 것 같은 데이터 중에서 가장 심층 학습 성능 향상에 도움이 될 데이터를 선택한다. 즉, 주어진 훈련 데이터 구축 비용 내에서 최고의 효과를 내도록 데이터의 순도(purity) 지표와 정보도(informativeness) 지표의 최적 균형(trade-off)을 찾는다. 순도와 정보도는 일반적으로 서로 상충하므로 최적 균형을 찾는 것이 간단하지 않다. 이 교수팀은 이러한 최적 균형이 정제 전 데이터의 분포 외 데이터 비율과 현재 심층신경망 훈련 정도에 따라 달라진다는 점을 발견했다.
이 교수팀은 이러한 최적 균형을 찾아내기 위해 추가적인 작은 신경망 모델을 도입했다. 연구팀은 추가된 모델을 훈련하기 위해 능동 학습에서 여러 단계에 걸쳐 데이터를 선별하는 과정을 활용했다. 즉, 새롭게 선택돼 레이블링 된 데이터를 순도-정보도 최적 균형을 찾기 위한 훈련 데이터로 활용했고, 레이블이 추가될 때마다 최적 균형을 갱신했다. 이러한 방법은 목표 심층신경망의 성능 향상을 위해 추가적인 상위 레벨의 신경망을 사용하였다는 점에서 메타학습(meta-learning)의 일종이라 볼 수 있다.
연구팀은 이 메타학습 방법론을 `메타 질의 네트워크'라고 이름 붙이고 이미지 분류 문제에 대해 다양한 데이터와 광범위한 분포 외 데이터 비율에 걸쳐 방법론을 검증했다. 그 결과, 기존 최신 방법론과 비교했을 때 최대 20% 향상된 최종 예측 정확도를 향상했고, 모든 범위의 분포 외 데이터 비율에서 일관되게 최고 성능을 보였다. 또한, `메타 질의 네트워크'의 최적 균형 분석을 통해, 분포 외 데이터의 비율이 낮고 현재 심층신경망의 성능이 높을수록 정보도에 높은 가중치를 둬야 함을 연구팀은 밝혀냈다.
제1 저자인 박동민 박사과정 학생은 "이번 기술은 실세계 능동 학습에서의 순도-정보도 딜레마를 발견하고 해결한 획기적인 방법ˮ 이라면서 "다양한 데이터 분포 상황에서의 강건성이 검증됐기 때문에, 실생활의 기계 학습 문제에 폭넓게 적용될 수 있어 전반적인 심층 학습의 훈련 데이터 준비 비용 절감에 기여할 것ˮ 이라고 밝혔다.
연구팀을 지도한 이재길 교수도 "이 기술이 텐서플로우(TensorFlow) 혹은 파이토치(PyTorch)와 같은 기존의 심층 학습 라이브러리에 추가되면 기계 학습 및 심층 학습 학계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(2020-0-00862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
2022.10.12
조회수 9425
-
 KAIST 최초의 마이크로 디그리, 데이터사이언스 대학원 '기초 기계학습' 개설
우리 대학이 기초 기계학습 마이크로 디그리를 개설한다. '마이크로 디그리(Micro Degree, 학점당 학위제)'는 교과목 분야별로 지정된 최소 학점을 단기간에 집중 이수한 학생들에게 정규 학위와 구분되는 별개의 미니 학위를 주는 제도다. 데이터사이언스 대학원(책임교수 문일철)이 주관하는 이번 프로그램은 우리 대학에 최초로 개설된 마이크로 디그리다. 기계학습의 근본적 원리를 기초 수준에서 다루는 교육과정으로 학생과 관련 분야 종사자들의 능력 계발을 위해 마련됐다. 기초 프로그래밍(파이썬) 능력과 대학교 1학년 수준의 수학(행렬, 미적분학) 지식을 바탕으로 진행되는 교과과정을 이해할 수 있는 학부 재학생 및 현업 실무자라면 누구나 수강할 수 있다. 오는 21일까지 이메일로 지원서를 제출할 수 있으며, 별도의 선발 과정 없이 일정 수준의 성취도를 얻은 수강생들에게 KAIST 총장 명의의 이수증이 수여된다. 마이크로 디그리 과정은 이달 26일부터 내년 4월까지 64시간의 온라인 수업과 서울에 있는 KAIST 도곡 캠퍼스에서 진행되는 48시간의 대면 수업을 혼합한 방식으로 진행된다. ▴데이터 구조 및 분석 ▴데이터사이언스 프로그래밍 ▴인공지능 및 기계학습 개론 ▴강화학습 등 데이터 구조 기초를 포함한 기초 기계학습 및 강화학습의 이론과 실무가 융합된 4개 교과목이 운영된다.
기술의 이면을 알고 싶은 학생들과 현장 실무의 어려움을 극복하려는 관련 분야 종사자들이 이론 분야의 근본 원리를 이해하고 이를 바탕으로 기계학습의 방법론 적용 및 문제 해결 능력을 향상할 수 있는 지식을 전달할 예정이다. 문일철 KAIST 데이터사이언스 책임교수는 "데이터사이언스 기술을 산업현장에 적용했을 때 발생하는 문제의 원인을 규명하거나 해결하기 위해서는 핵심 이론 및 적용에 대한 체계적 교육이 필요하다"라고 강조했다. 이어, 문 책임교수는 "KAIST의 첫 마이크로 디그리로 기초 기계학습의 이론 및 기술 과목을 개설해 대한민국 데이터 기반 산업의 발전 및 미래 사회 변화에 중요하게 이바지할 교육을 청년층에 제공하고 더 나아가 KAIST의 실용적인 학풍이 대중에게도 전달되기를 바란다"라고 전했다.
이번 마이크로 디그리를 이수하면 KAIST 데이터사이언스 대학원 입학 시 졸업요건 학점으로 인정되며, KAIST는 인공위성·반도체 분야 등에도 마이크로 디그리 과정 개설하는 방안을 검토 중이다.
KAIST 기초 기계학습 마이크로 디그리에 관한 자세한 내용 및 수강료 관련 정보는 데이터사이언스대학원 홈페이지( gsds.kaist.ac.kr )에서 확인할 수 있다.
KAIST 최초의 마이크로 디그리, 데이터사이언스 대학원 '기초 기계학습' 개설
우리 대학이 기초 기계학습 마이크로 디그리를 개설한다. '마이크로 디그리(Micro Degree, 학점당 학위제)'는 교과목 분야별로 지정된 최소 학점을 단기간에 집중 이수한 학생들에게 정규 학위와 구분되는 별개의 미니 학위를 주는 제도다. 데이터사이언스 대학원(책임교수 문일철)이 주관하는 이번 프로그램은 우리 대학에 최초로 개설된 마이크로 디그리다. 기계학습의 근본적 원리를 기초 수준에서 다루는 교육과정으로 학생과 관련 분야 종사자들의 능력 계발을 위해 마련됐다. 기초 프로그래밍(파이썬) 능력과 대학교 1학년 수준의 수학(행렬, 미적분학) 지식을 바탕으로 진행되는 교과과정을 이해할 수 있는 학부 재학생 및 현업 실무자라면 누구나 수강할 수 있다. 오는 21일까지 이메일로 지원서를 제출할 수 있으며, 별도의 선발 과정 없이 일정 수준의 성취도를 얻은 수강생들에게 KAIST 총장 명의의 이수증이 수여된다. 마이크로 디그리 과정은 이달 26일부터 내년 4월까지 64시간의 온라인 수업과 서울에 있는 KAIST 도곡 캠퍼스에서 진행되는 48시간의 대면 수업을 혼합한 방식으로 진행된다. ▴데이터 구조 및 분석 ▴데이터사이언스 프로그래밍 ▴인공지능 및 기계학습 개론 ▴강화학습 등 데이터 구조 기초를 포함한 기초 기계학습 및 강화학습의 이론과 실무가 융합된 4개 교과목이 운영된다.
기술의 이면을 알고 싶은 학생들과 현장 실무의 어려움을 극복하려는 관련 분야 종사자들이 이론 분야의 근본 원리를 이해하고 이를 바탕으로 기계학습의 방법론 적용 및 문제 해결 능력을 향상할 수 있는 지식을 전달할 예정이다. 문일철 KAIST 데이터사이언스 책임교수는 "데이터사이언스 기술을 산업현장에 적용했을 때 발생하는 문제의 원인을 규명하거나 해결하기 위해서는 핵심 이론 및 적용에 대한 체계적 교육이 필요하다"라고 강조했다. 이어, 문 책임교수는 "KAIST의 첫 마이크로 디그리로 기초 기계학습의 이론 및 기술 과목을 개설해 대한민국 데이터 기반 산업의 발전 및 미래 사회 변화에 중요하게 이바지할 교육을 청년층에 제공하고 더 나아가 KAIST의 실용적인 학풍이 대중에게도 전달되기를 바란다"라고 전했다.
이번 마이크로 디그리를 이수하면 KAIST 데이터사이언스 대학원 입학 시 졸업요건 학점으로 인정되며, KAIST는 인공위성·반도체 분야 등에도 마이크로 디그리 과정 개설하는 방안을 검토 중이다.
KAIST 기초 기계학습 마이크로 디그리에 관한 자세한 내용 및 수강료 관련 정보는 데이터사이언스대학원 홈페이지( gsds.kaist.ac.kr )에서 확인할 수 있다.
2022.09.08
조회수 6581
-
 전산학부 이하연, 전기및전자공학부 최유정, 2022 구글 PhD 펠로우 선정
우리 대학 전기및전자공학부 박사과정 최유정 학생(지도교수 유민수)과 전산학부 박사과정 이하연 학생(지도교수 황성주)이 ‘2022 구글 PhD 펠로우’에 선정됐다.
구글 PhD 펠로우십은 컴퓨터과학과 관련된 유망 연구 분야에서 우수한 성과를 낸 대학원생을 지원하는 장학 프로그램으로 올해는 전 세계에서 61명이 선발됐다. 선정된 펠로우에게는 1만 달러의 장학금과 구글 각 분야 전문가 멘토와의 일대일 연구 토의, 피드백 등의 혜택이 주어진다.
최유정 학생은 시스템 및 네트워크(Systems and Networking) 분야에서 펠로우로 선정됐다. 최유정 학생은 머신러닝을 위한 컴퓨터 구조 및 시스템 설계 분야의 탁월한 연구 성과를 인정받아 선정됐다. 이하연 학생은 기계학습(Machine Learning) 분야에서 신경망 구조 탐색(Neural Architecture Search)과 메타학습(Meta-learning) 분야의 탁월한 연구성과들을 인정받아 선정되었다.
최유정 학생은 머신러닝의 추론을 위한 컴퓨터 구조 및 시스템 설계에 대한 탁월한 연구 성과를 인정받았다. 특히 다수의 머신러닝 모델을 동시에 처리하여 연산 효율을 높이는 가속기 설계를 최초로 제안하여 주목을 받았다. 또한, 머신러닝 서버 및 시스템에 최적화된 스케줄링과 자원 관리 방법을 제안하여 효율적인 머신러닝 서비스 제공을 가능하게 하였다. 이러한 다양한 연구들은 HPCA, ASPLOS, DAC 등의 유수 컴퓨터 구조 분야 국제학술대회에 발표되었으며, 그의 연구는 매년 컴퓨터 구조 분야의 우수한 연구 성과를 선정하는 IEEE Micro Top Picks 2020에도 선정된 바가 있다.
이하연 학생은 메타 학습을 이용한 신경망 탐색 모델을 설계하여, 메타 학습과 신경망 탐색이라는 기계 학습의 주요 두 분야에서 탁월한 연구성과를 인정받았다. 신경망 탐색이라는 대규모 작업에 메타 학습을 적용하여 메타 학습의 확장성을 보였으며, 메타지식을 이용하여 빠른 신경망 탐색을 가능하게 했다. 이러한 다양한 연구성과들은 NeurIPS, ICLR 등 기계학습 및 딥러닝 분야의 최고 학회에 다수 선정되었다. 특히 5편 중 3편이 상위 5% 이내의 성적을 의미하는 스포트라이트 (spotlight), 1편이 상위 2% 이내의 성적을 의미하는 구두 (oral) 발표에 초청되었다. 또한 연구 인턴십을 통해 메타 (Meta) 연구진과 협력하여 효율적이며 고성능인 신경망 모델 탐색 연구를 수행하고 있다.
시상식은 COVID-19 상황으로 인해, 7월 27일부터 7월 28일 양일간 가상으로 열린 구글 PhD 펠로우십 서밋(Google PhD Fellowship Summit)에서 진행됐으며, 수상자 리스트는 구글 홈페이지에 게시돼 있다.
(홈페이지 주소 : https://research.google/outreach/phd-fellowship/recipients)
전산학부 이하연, 전기및전자공학부 최유정, 2022 구글 PhD 펠로우 선정
우리 대학 전기및전자공학부 박사과정 최유정 학생(지도교수 유민수)과 전산학부 박사과정 이하연 학생(지도교수 황성주)이 ‘2022 구글 PhD 펠로우’에 선정됐다.
구글 PhD 펠로우십은 컴퓨터과학과 관련된 유망 연구 분야에서 우수한 성과를 낸 대학원생을 지원하는 장학 프로그램으로 올해는 전 세계에서 61명이 선발됐다. 선정된 펠로우에게는 1만 달러의 장학금과 구글 각 분야 전문가 멘토와의 일대일 연구 토의, 피드백 등의 혜택이 주어진다.
최유정 학생은 시스템 및 네트워크(Systems and Networking) 분야에서 펠로우로 선정됐다. 최유정 학생은 머신러닝을 위한 컴퓨터 구조 및 시스템 설계 분야의 탁월한 연구 성과를 인정받아 선정됐다. 이하연 학생은 기계학습(Machine Learning) 분야에서 신경망 구조 탐색(Neural Architecture Search)과 메타학습(Meta-learning) 분야의 탁월한 연구성과들을 인정받아 선정되었다.
최유정 학생은 머신러닝의 추론을 위한 컴퓨터 구조 및 시스템 설계에 대한 탁월한 연구 성과를 인정받았다. 특히 다수의 머신러닝 모델을 동시에 처리하여 연산 효율을 높이는 가속기 설계를 최초로 제안하여 주목을 받았다. 또한, 머신러닝 서버 및 시스템에 최적화된 스케줄링과 자원 관리 방법을 제안하여 효율적인 머신러닝 서비스 제공을 가능하게 하였다. 이러한 다양한 연구들은 HPCA, ASPLOS, DAC 등의 유수 컴퓨터 구조 분야 국제학술대회에 발표되었으며, 그의 연구는 매년 컴퓨터 구조 분야의 우수한 연구 성과를 선정하는 IEEE Micro Top Picks 2020에도 선정된 바가 있다.
이하연 학생은 메타 학습을 이용한 신경망 탐색 모델을 설계하여, 메타 학습과 신경망 탐색이라는 기계 학습의 주요 두 분야에서 탁월한 연구성과를 인정받았다. 신경망 탐색이라는 대규모 작업에 메타 학습을 적용하여 메타 학습의 확장성을 보였으며, 메타지식을 이용하여 빠른 신경망 탐색을 가능하게 했다. 이러한 다양한 연구성과들은 NeurIPS, ICLR 등 기계학습 및 딥러닝 분야의 최고 학회에 다수 선정되었다. 특히 5편 중 3편이 상위 5% 이내의 성적을 의미하는 스포트라이트 (spotlight), 1편이 상위 2% 이내의 성적을 의미하는 구두 (oral) 발표에 초청되었다. 또한 연구 인턴십을 통해 메타 (Meta) 연구진과 협력하여 효율적이며 고성능인 신경망 모델 탐색 연구를 수행하고 있다.
시상식은 COVID-19 상황으로 인해, 7월 27일부터 7월 28일 양일간 가상으로 열린 구글 PhD 펠로우십 서밋(Google PhD Fellowship Summit)에서 진행됐으며, 수상자 리스트는 구글 홈페이지에 게시돼 있다.
(홈페이지 주소 : https://research.google/outreach/phd-fellowship/recipients)
2022.09.08
조회수 8445