%EB%A1%9C%EB%B3%B4%ED%8B%B1%EC%8A%A4
-
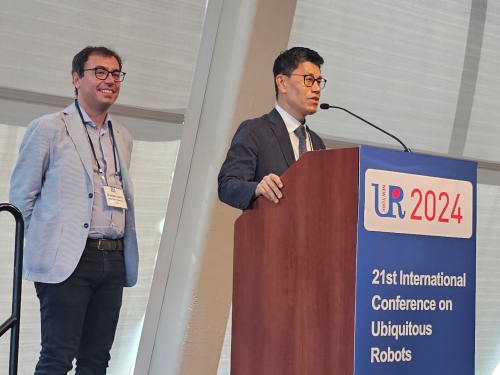 제21회 Ubiquitous Robots 2024 국제학술대회 개최
우리 대학이 한국로봇학회, 뉴욕대학교(이하 NYU)와 공동으로 '제21회 Ubiquitous Robots 2024 국제학술대회'를 지난달 24일부터 4일간 개최했다. 'KAIST-NYU 로보틱스 연구센터'의 주관으로 NYU 킴멜센터에서 열린 이번 학술대회는 유지환 건설및환경공학과 교수와 주세피 로이아노(Giuseppe Loianno) NYU 전기및컴퓨터공학과 교수가 공동조직위원장을 맡고 경기욱 기계공학과 교수와 파록 아타시자(Farokh Atashzar) NYU 기계공학과·전기및컴퓨터공학과 교수가 공동프로그램 위원장을 맡았다. 명예 조직위원장인 린다 밀스(LInda G. Mills) NYU 총장은 축사를 통해 대한민국 및 KAIST와 협력하는 파트너십의 중요성을 역설했다.
학술대회가 열린 나흘 동안 7개의 워크숍이 열려 4명의 기조 연사 발표와 더불어 200여 편의 연구자 논문 발표가 이루어졌다.
자데브 드사이(Jaydev P. Desai), 조지아텍 교수는 '로봇 공학이 경피적 및 혈관 내 시술 분야에서 직면하고 있는 어려움과 가능성(Challenges and Opportunities in Robotics for Transcatheter and Endovascular Interventions)'을 주제로 심장 판막 질환인 승모판 역류를 해결하기 위해 승모판 삽입물을 전달하는 로봇 솔루션 개발 및 로봇으로 조종할 수 있는 가이드와이어 개발에 대하여 발표했다.
사미 하다딘(Sami Haddadin), 뮌헨공대 교수는 '스스로 학습하며 환경과 상호작용 하는 로봇 개발(building the machine and learning the self)'을 주제로 발표했다. 로봇이 환경과 상호작용하며 물체를 조작할 수 있도록 만드는 것이 로봇공학 분야에서 매우 중요한 과제이지만, 여전히 많은 부분 해결되지 않았다는 점을 강조하고 스스로 학습해 주변 환경과 상호작용하는 로봇시스템 개발을 소개했다.
카차 몸바우(Katja Mombaur) 카스루공대 교수는 '인간형로봇의 실세계에서의 행동지능 (Motion intelligence for humanoid robots in the real world: the roles of bio-inspiration and computational methods)'을 주제로 인간 운동의 일반 원칙을 수학적으로 모델링하고, 모델에 기반한 방법과 모델 자유 접근 방식을 결합하여 설계된 인간형 로봇의 적응형 동작 제어 방법을 강연했다.
정순조 캘리포니아 공과대학교 교수는 '로봇 학습에서 컨트랙션의 중요성(Contraction is all you need in Robot learning)' 강연을 통해 실험실에서 직접 개발한 세계 최초의 날 수 있는 휴머노이드 로봇을 비롯해 새로운 개념의 학습 기반 계층적 최적제어 방법을 적용한 다양한 실용적 비행로봇 시스템에 관해 이야기했다.
학회 마지막 날에는 참가자들이 NYU의 로봇 관련 연구실을 둘러보는 테크 투어 프로그램이 진행돼 ▴ 수술로봇·햅틱 및 상호작용 로봇·뇌파기판 인터페이스 등을 연구하는 파록 아타시자 교수의 '메디컬 및 상호작용 지능로봇 실험실(Medical Robotics and Interactive Intelligent Technologies Lab)' ▴ 변화하는 주변 환경에 민첩하게 대응할 수 있는 다중로봇의 자율성 개발 분야 연구를 수행하는 주세피 로이아노 교수의 '민첩한 로봇 및 인지 실험실(Agile Robotics and Perception Lab)' ▴ 제어, 네트워크, 비선형 동역학에 기반을 둔 물리시스템의 모델링, 해석, 그리고 소프트로봇 응용시스템을 개발하는 마우리지오 포리리(Maurizio Porfiri) 교수의 '동역학 실험실 (Dynamical Systems Lab)' 등을 방문했다.
이번 학술대회에는 한국로봇학회 차기회장으로 선출된 김정 기계공학과 학과장을 포함해 박형순, 김진환, 박해원 기계공학과 교수와 명현 전기및전자공학부 교수, 이동만 전산학부 교수 등 로봇 분야를 연구하는 다수의 우리 대학 교수와 NYU의 로봇 및 제어 관련 분야 교수도 전원 참석해 뜻깊은 학술교류의 시간을 가졌다.
이와 함께, 김정 기계공학과 학과장은 카츠오 쿠라바야시(Katsuo Kurabayashi) NYU 기계항공공학과 학과장과 양 학과의 협력을 논의하는 등 우리 대학과 NYU의 가시적인 협력의 성과를 확인할 수 있는 의미 있는 행사로 평가됐다. 공동조직위원장으로 행사를 총괄한 유지환 건설및환경공학과 교수는 "KAIST-NYU 로봇연구센터가 주관한 이번 학술대회를 뉴욕에서 성공적으로 개최하게 되어 기쁘게 생각하고, 이를 기반으로 유비쿼터스 로봇 학회가 로봇 분야 중·소규모 학술대회로서 세계적인 입지를 확실하게 다지는 계기를 마련할 것"이라고 밝혔다.
2024.07.05 조회수 452
제21회 Ubiquitous Robots 2024 국제학술대회 개최
우리 대학이 한국로봇학회, 뉴욕대학교(이하 NYU)와 공동으로 '제21회 Ubiquitous Robots 2024 국제학술대회'를 지난달 24일부터 4일간 개최했다. 'KAIST-NYU 로보틱스 연구센터'의 주관으로 NYU 킴멜센터에서 열린 이번 학술대회는 유지환 건설및환경공학과 교수와 주세피 로이아노(Giuseppe Loianno) NYU 전기및컴퓨터공학과 교수가 공동조직위원장을 맡고 경기욱 기계공학과 교수와 파록 아타시자(Farokh Atashzar) NYU 기계공학과·전기및컴퓨터공학과 교수가 공동프로그램 위원장을 맡았다. 명예 조직위원장인 린다 밀스(LInda G. Mills) NYU 총장은 축사를 통해 대한민국 및 KAIST와 협력하는 파트너십의 중요성을 역설했다.
학술대회가 열린 나흘 동안 7개의 워크숍이 열려 4명의 기조 연사 발표와 더불어 200여 편의 연구자 논문 발표가 이루어졌다.
자데브 드사이(Jaydev P. Desai), 조지아텍 교수는 '로봇 공학이 경피적 및 혈관 내 시술 분야에서 직면하고 있는 어려움과 가능성(Challenges and Opportunities in Robotics for Transcatheter and Endovascular Interventions)'을 주제로 심장 판막 질환인 승모판 역류를 해결하기 위해 승모판 삽입물을 전달하는 로봇 솔루션 개발 및 로봇으로 조종할 수 있는 가이드와이어 개발에 대하여 발표했다.
사미 하다딘(Sami Haddadin), 뮌헨공대 교수는 '스스로 학습하며 환경과 상호작용 하는 로봇 개발(building the machine and learning the self)'을 주제로 발표했다. 로봇이 환경과 상호작용하며 물체를 조작할 수 있도록 만드는 것이 로봇공학 분야에서 매우 중요한 과제이지만, 여전히 많은 부분 해결되지 않았다는 점을 강조하고 스스로 학습해 주변 환경과 상호작용하는 로봇시스템 개발을 소개했다.
카차 몸바우(Katja Mombaur) 카스루공대 교수는 '인간형로봇의 실세계에서의 행동지능 (Motion intelligence for humanoid robots in the real world: the roles of bio-inspiration and computational methods)'을 주제로 인간 운동의 일반 원칙을 수학적으로 모델링하고, 모델에 기반한 방법과 모델 자유 접근 방식을 결합하여 설계된 인간형 로봇의 적응형 동작 제어 방법을 강연했다.
정순조 캘리포니아 공과대학교 교수는 '로봇 학습에서 컨트랙션의 중요성(Contraction is all you need in Robot learning)' 강연을 통해 실험실에서 직접 개발한 세계 최초의 날 수 있는 휴머노이드 로봇을 비롯해 새로운 개념의 학습 기반 계층적 최적제어 방법을 적용한 다양한 실용적 비행로봇 시스템에 관해 이야기했다.
학회 마지막 날에는 참가자들이 NYU의 로봇 관련 연구실을 둘러보는 테크 투어 프로그램이 진행돼 ▴ 수술로봇·햅틱 및 상호작용 로봇·뇌파기판 인터페이스 등을 연구하는 파록 아타시자 교수의 '메디컬 및 상호작용 지능로봇 실험실(Medical Robotics and Interactive Intelligent Technologies Lab)' ▴ 변화하는 주변 환경에 민첩하게 대응할 수 있는 다중로봇의 자율성 개발 분야 연구를 수행하는 주세피 로이아노 교수의 '민첩한 로봇 및 인지 실험실(Agile Robotics and Perception Lab)' ▴ 제어, 네트워크, 비선형 동역학에 기반을 둔 물리시스템의 모델링, 해석, 그리고 소프트로봇 응용시스템을 개발하는 마우리지오 포리리(Maurizio Porfiri) 교수의 '동역학 실험실 (Dynamical Systems Lab)' 등을 방문했다.
이번 학술대회에는 한국로봇학회 차기회장으로 선출된 김정 기계공학과 학과장을 포함해 박형순, 김진환, 박해원 기계공학과 교수와 명현 전기및전자공학부 교수, 이동만 전산학부 교수 등 로봇 분야를 연구하는 다수의 우리 대학 교수와 NYU의 로봇 및 제어 관련 분야 교수도 전원 참석해 뜻깊은 학술교류의 시간을 가졌다.
이와 함께, 김정 기계공학과 학과장은 카츠오 쿠라바야시(Katsuo Kurabayashi) NYU 기계항공공학과 학과장과 양 학과의 협력을 논의하는 등 우리 대학과 NYU의 가시적인 협력의 성과를 확인할 수 있는 의미 있는 행사로 평가됐다. 공동조직위원장으로 행사를 총괄한 유지환 건설및환경공학과 교수는 "KAIST-NYU 로봇연구센터가 주관한 이번 학술대회를 뉴욕에서 성공적으로 개최하게 되어 기쁘게 생각하고, 이를 기반으로 유비쿼터스 로봇 학회가 로봇 분야 중·소규모 학술대회로서 세계적인 입지를 확실하게 다지는 계기를 마련할 것"이라고 밝혔다.
2024.07.05 조회수 452 -
 2024 제3회 실리콘밸리 글로벌 기업가정신 써머스쿨(GESS) 성료
우리 대학 국제협력처 글로벌전략사업추진단(단장 임만성)이 올해 세 번째로 개최한 '2024 글로벌 기업가정신 써머스쿨(GESS; Global Entrepreneurship Summer School, 이하 2024 KAIST GESS)'가 성료됐다. KAIST GESS는 학생들이 세계적인 창업 허브인 실리콘밸리 지역을 방문해 창업 생태계를 직접 경험하고, 글로벌 진출을 위한 역량을 함양할 수 있도록 기획된 프로그램이다. 서류, 면접 및 발표 심사, 멘토링 및 동료 평가를 거쳐 선발된 20명과 우리 대학 경영대학 소속 임팩트(Impact) MBA 교육과정생 17명 등 총 37명이 참가했다. 참가자들은 지난 5월부터 약 2개월간 우리 대학에 재학 중인 선배 창업가로부터 비즈니스 모델 개발 및 투자발표에 대한 멘토링을 받은 후 대전 본원 캠퍼스에서 팀별 사업 아이템을 발전시켰다.
이후 지난달 23일부터 7일간 미국 현지 코트라 실리콘밸리 무역관, 제이피 모건(JP Morgan), 플러그앤플레이 테크센터(Plug and play Tech Center)에서 ▴글로벌기업가정신 ▴실패를 통한 배움 ▴자본과 네트워크 ▴스타트업 문화 등을 주제로 진행된 글로벌 창업 교육을 이수했다.
또한, 베어로보틱스(Bear Robotics, 대표 하정우), 사운더블헬스(Soundable Health, 대표 송지영), 임프리메드(ImpriMed, 대표 임성원), 팬텀 에이아이(Phantom AI, 대표 조형기), 비가라지(B Garage, 대표 김영준), 심플스텝스(Simple Steps, 대표 김도연)사 등 현지 기업을 방문해 글로벌 기술 창업의 현장을 경험하고 실리콘밸리 대표들의 생생한 경험담을 공유하는 강연도 진행됐다.
실리콘밸리에 이주한 한국 이민 여성의 경력단절을 막고 유능한 이민 여성들이 사회에서 능력을 발휘할 수 있도록 지원하는 심플스텝스 김도연 대표는 "KAIST 동문 기업인으로서 글로벌창업을 꿈꾸는 후배들과 미국에서 사회적 기업을 운영하게 된 경험을 공유할 수 있어 뜻깊었다"라고 전했다.
올해는 특별히 반도체 및 인프라 소프트웨어 기술 분야에서 세계적으로 손꼽히는 기업인 브로드컴(Broadcom)이 참가자들을 초청해 혹탄(Hock Tan) 회장의 강연을 듣고 질의응답을 진행하는 프로그램이 마련됐다. 지난 2월 우리 대학에서 명예 공학박사 학위를 받은 혹탄 회장은 "글로벌기업가로 성장하기 위해서는 실패를 경험하는 것과 오랜 기간 꾸준히 노력하는 것이 무엇보다 중요하며, 글로벌 시장에 영향을 미치는 기술은 세대를 거쳐 진화하고 있다"라고 역설했다.
또한, 실리콘밸리 써니베일 지역사회 및 풋힐 칼리지(Foothill College)와 함께 '인공지능 기술아 놀자 (Let’s play with AI+ Tech)'라는 봉사활동 프로그램을 진행했다. 우리 대학 학생들이 주도하는 챗봇(Chatbot) 교육에 써니베일 지역의 저소득층 초등학생과 학부모가 함께 참여해 미국 지역사회와 소통하는 시간을 가졌다.
2024 KAIST GESS 하이라이트인 최종 피칭에서는 실리콘밸리 전문 엑셀러레이터로부터 지속적인 대면 멘토링으로 조언을 받으며 각자의 비즈니스 모델을 발전시킨 참가자들이 실리콘밸리 현지 벤처 투자자로 구성된 심사단의 평가를 받았다.
최종 피칭에서 우승한 케이 브릿지(K-Bridge)팀의 한수민(전산학부 박사과정) 학생은 "2024 KAIST GESS는 제가 학사 과정에 입학했을 때부터 꿈꿔왔던 글로벌창업가로서의 길을 안내해 준 프로그램이다"라고 소감을 밝혔다.
2위를 차지한 KAIST 인에이블러스(KAIST Enablers)팀의 강승욱(화학과 학사과정) 학생은 "이번 경험을 잊지 않고 글로벌 창업가로 성장해 향후 GESS 프로그램에 연사로 초청받고 싶다"라는 포부를 밝히기도 했다.
임팩트 MBA 최종피칭 세션에서 우승한 캥스터즈 주식회사(대표 김강)는 GESS 최종피칭을 통해 현지 투자사와의 미팅이 성사되는 성과를 거뒀다.
행사를 주관한 임만성 글로벌전략사업추진단장은 "KAIST 학생들이 글로벌 영향력을 갖춘 리더로 성장하고, 글로벌 가치를 창출해 국제 사회에 기여하고 동시에 우리 대학의 국제적 위상을 높이길 기대한다”고 말했다.
또한, 17명의 임팩트 MBA 교육과정생을 이끈 박상찬 교수는 “글로벌시장을 선도하고 있는 기업가들과의 만남과 실리콘밸리 현지에서 바라보는 창업 문화는 글로벌 창업을 목표로 하는 학생들에게 소중한 배움의 시간이 되었다"라고 의의를 강조했다.2024 KAIST GESS는 우리 대학 국제협력처, 경영대학, 창업원의 협력으로 추진되었으며, 글로벌창업교육 프로그램을 앞으로도 지속적으로 추진해 글로벌 리더의 덕목을 갖춘 창업가를 양성할 계획이다.
2024.07.05 조회수 408
2024 제3회 실리콘밸리 글로벌 기업가정신 써머스쿨(GESS) 성료
우리 대학 국제협력처 글로벌전략사업추진단(단장 임만성)이 올해 세 번째로 개최한 '2024 글로벌 기업가정신 써머스쿨(GESS; Global Entrepreneurship Summer School, 이하 2024 KAIST GESS)'가 성료됐다. KAIST GESS는 학생들이 세계적인 창업 허브인 실리콘밸리 지역을 방문해 창업 생태계를 직접 경험하고, 글로벌 진출을 위한 역량을 함양할 수 있도록 기획된 프로그램이다. 서류, 면접 및 발표 심사, 멘토링 및 동료 평가를 거쳐 선발된 20명과 우리 대학 경영대학 소속 임팩트(Impact) MBA 교육과정생 17명 등 총 37명이 참가했다. 참가자들은 지난 5월부터 약 2개월간 우리 대학에 재학 중인 선배 창업가로부터 비즈니스 모델 개발 및 투자발표에 대한 멘토링을 받은 후 대전 본원 캠퍼스에서 팀별 사업 아이템을 발전시켰다.
이후 지난달 23일부터 7일간 미국 현지 코트라 실리콘밸리 무역관, 제이피 모건(JP Morgan), 플러그앤플레이 테크센터(Plug and play Tech Center)에서 ▴글로벌기업가정신 ▴실패를 통한 배움 ▴자본과 네트워크 ▴스타트업 문화 등을 주제로 진행된 글로벌 창업 교육을 이수했다.
또한, 베어로보틱스(Bear Robotics, 대표 하정우), 사운더블헬스(Soundable Health, 대표 송지영), 임프리메드(ImpriMed, 대표 임성원), 팬텀 에이아이(Phantom AI, 대표 조형기), 비가라지(B Garage, 대표 김영준), 심플스텝스(Simple Steps, 대표 김도연)사 등 현지 기업을 방문해 글로벌 기술 창업의 현장을 경험하고 실리콘밸리 대표들의 생생한 경험담을 공유하는 강연도 진행됐다.
실리콘밸리에 이주한 한국 이민 여성의 경력단절을 막고 유능한 이민 여성들이 사회에서 능력을 발휘할 수 있도록 지원하는 심플스텝스 김도연 대표는 "KAIST 동문 기업인으로서 글로벌창업을 꿈꾸는 후배들과 미국에서 사회적 기업을 운영하게 된 경험을 공유할 수 있어 뜻깊었다"라고 전했다.
올해는 특별히 반도체 및 인프라 소프트웨어 기술 분야에서 세계적으로 손꼽히는 기업인 브로드컴(Broadcom)이 참가자들을 초청해 혹탄(Hock Tan) 회장의 강연을 듣고 질의응답을 진행하는 프로그램이 마련됐다. 지난 2월 우리 대학에서 명예 공학박사 학위를 받은 혹탄 회장은 "글로벌기업가로 성장하기 위해서는 실패를 경험하는 것과 오랜 기간 꾸준히 노력하는 것이 무엇보다 중요하며, 글로벌 시장에 영향을 미치는 기술은 세대를 거쳐 진화하고 있다"라고 역설했다.
또한, 실리콘밸리 써니베일 지역사회 및 풋힐 칼리지(Foothill College)와 함께 '인공지능 기술아 놀자 (Let’s play with AI+ Tech)'라는 봉사활동 프로그램을 진행했다. 우리 대학 학생들이 주도하는 챗봇(Chatbot) 교육에 써니베일 지역의 저소득층 초등학생과 학부모가 함께 참여해 미국 지역사회와 소통하는 시간을 가졌다.
2024 KAIST GESS 하이라이트인 최종 피칭에서는 실리콘밸리 전문 엑셀러레이터로부터 지속적인 대면 멘토링으로 조언을 받으며 각자의 비즈니스 모델을 발전시킨 참가자들이 실리콘밸리 현지 벤처 투자자로 구성된 심사단의 평가를 받았다.
최종 피칭에서 우승한 케이 브릿지(K-Bridge)팀의 한수민(전산학부 박사과정) 학생은 "2024 KAIST GESS는 제가 학사 과정에 입학했을 때부터 꿈꿔왔던 글로벌창업가로서의 길을 안내해 준 프로그램이다"라고 소감을 밝혔다.
2위를 차지한 KAIST 인에이블러스(KAIST Enablers)팀의 강승욱(화학과 학사과정) 학생은 "이번 경험을 잊지 않고 글로벌 창업가로 성장해 향후 GESS 프로그램에 연사로 초청받고 싶다"라는 포부를 밝히기도 했다.
임팩트 MBA 최종피칭 세션에서 우승한 캥스터즈 주식회사(대표 김강)는 GESS 최종피칭을 통해 현지 투자사와의 미팅이 성사되는 성과를 거뒀다.
행사를 주관한 임만성 글로벌전략사업추진단장은 "KAIST 학생들이 글로벌 영향력을 갖춘 리더로 성장하고, 글로벌 가치를 창출해 국제 사회에 기여하고 동시에 우리 대학의 국제적 위상을 높이길 기대한다”고 말했다.
또한, 17명의 임팩트 MBA 교육과정생을 이끈 박상찬 교수는 “글로벌시장을 선도하고 있는 기업가들과의 만남과 실리콘밸리 현지에서 바라보는 창업 문화는 글로벌 창업을 목표로 하는 학생들에게 소중한 배움의 시간이 되었다"라고 의의를 강조했다.2024 KAIST GESS는 우리 대학 국제협력처, 경영대학, 창업원의 협력으로 추진되었으며, 글로벌창업교육 프로그램을 앞으로도 지속적으로 추진해 글로벌 리더의 덕목을 갖춘 창업가를 양성할 계획이다.
2024.07.05 조회수 408 -
 라이온로보틱스, 알데바, 도전! K-스타트업 창업리그 대상 수상
국내 최대 창업경진대회인 ‘도전! K-스타트업 2023’에서 우리 대학 기계공학과 황보제민 교수의 사족로봇 ‘라이보’를 개발한 라이온로보틱스, 신소재공학과 스티브박 교수의 교원창업 기업 알데바가 올해 왕중왕(대상)을 차지했다.
중소벤처기업부와 창업진흥원은 31일 국내 최대 창업경진대회인 ‘도전! K-스타트업 2023’의 왕중왕전(대상) 리그를 열고 수상자를 발표했다. 총 6187개 팀이 참여한 이번 대회에는 30개 팀이 최종 결승에 진출해 이 가운데 20개 팀이 입상의 기쁨을 누렸다.
이날 수상팀 선정작업을 맡은 대회 관계자는 "이전까지는 플랫폼 산업 관련 스타트업이 두각을 드러내며 유니콘으로 성장했다면, 앞으로는 딥테크와 바이오 등 다양한 기업이 눈에 띄게 성장해 시장에 현존하는 문제를 잘 풀어나갈 것으로 보인다"고 평가했다.
이날 대회에서 수상한 기업은 총 15억원의 상금과 후속 지원 등의 혜택을 제공받을 예정이다.
이영 중소벤처기업부 장관은 "도전! K-스타트업은 2016년부터 시작돼 매년 평균 5800개 기업, 올해는 6100개 스타트업이 참여해 대한민국 최고의 스타트업 창업 경진 대회로 자리를 굳히고 있다"고 밝혔다.
이어 이 장관은 "지난해까지 누적 수상한 101개 기업들이 매출 2940억을 만들어냈고 올해 6월 기준 2387명의 고용을 창출하는 등 대한민국 경제에 가시적 역할을 해낸 만큼 이번에 선발된 기업들도 선배들의 길을 이어 역사를 써나갈 것이라 확신한다"고 피력했다.
2023.11.02 조회수 2094
라이온로보틱스, 알데바, 도전! K-스타트업 창업리그 대상 수상
국내 최대 창업경진대회인 ‘도전! K-스타트업 2023’에서 우리 대학 기계공학과 황보제민 교수의 사족로봇 ‘라이보’를 개발한 라이온로보틱스, 신소재공학과 스티브박 교수의 교원창업 기업 알데바가 올해 왕중왕(대상)을 차지했다.
중소벤처기업부와 창업진흥원은 31일 국내 최대 창업경진대회인 ‘도전! K-스타트업 2023’의 왕중왕전(대상) 리그를 열고 수상자를 발표했다. 총 6187개 팀이 참여한 이번 대회에는 30개 팀이 최종 결승에 진출해 이 가운데 20개 팀이 입상의 기쁨을 누렸다.
이날 수상팀 선정작업을 맡은 대회 관계자는 "이전까지는 플랫폼 산업 관련 스타트업이 두각을 드러내며 유니콘으로 성장했다면, 앞으로는 딥테크와 바이오 등 다양한 기업이 눈에 띄게 성장해 시장에 현존하는 문제를 잘 풀어나갈 것으로 보인다"고 평가했다.
이날 대회에서 수상한 기업은 총 15억원의 상금과 후속 지원 등의 혜택을 제공받을 예정이다.
이영 중소벤처기업부 장관은 "도전! K-스타트업은 2016년부터 시작돼 매년 평균 5800개 기업, 올해는 6100개 스타트업이 참여해 대한민국 최고의 스타트업 창업 경진 대회로 자리를 굳히고 있다"고 밝혔다.
이어 이 장관은 "지난해까지 누적 수상한 101개 기업들이 매출 2940억을 만들어냈고 올해 6월 기준 2387명의 고용을 창출하는 등 대한민국 경제에 가시적 역할을 해낸 만큼 이번에 선발된 기업들도 선배들의 길을 이어 역사를 써나갈 것이라 확신한다"고 피력했다.
2023.11.02 조회수 2094 -
 임재환 교수팀, 국내 최초 국제로보틱스학회(RSS) 논문상 수상
우리 대학 김재철AI대학원 임재환 교수팀이 로보틱스: 과학 및 시스템 학회 2023(Robotics: Science and Systems, 이하 RSS)에서 국내 최초로 최고 시스템 논문상(Best System Paper Award)을 수상했다고 28일 밝혔다.
RSS는 로봇 과학과 시스템에 관한 세계 최고의 국제 학회 중 하나로서, 로봇 공학과 로봇 학습 분야의 최신 연구 결과 및 기술적 진전을 발표하고 공유하는 학회다. RSS 최고 시스템 논문상은 실제 로봇 시스템 구현 및 실험 결과에 초점을 두고 있는 논문 중 가장 뛰어난 논문에 수여되는 상이다.
김재철AI대학원 석사과정생 2명과 졸업생 1명(곧 연세대 임용예정)으로 이루어진 임재환 교수팀의 RSS 학회 수상은 한국인으로는 최초이며 국내 기관 연구로도 최초 사례다.
최근 인공지능 및 딥러닝(Deep learning) 알고리즘 기술의 발전으로 로봇 분야는 성공적인 성과를 내고 있다. 하지만 대부분 성과는 실제 환경에서의 복잡하고 긴 작업(물류, 집안일 등)에 대한 해결보다는 시뮬레이션 환경에서의 짧고 간단한 작업(걷기, 물건 집기 등)에 국한돼 있다. 그 이유는 학습 기반 인공지능 기술의 개발 및 검증에 필수인 데이터 구축이 다른 분야에 비해 실제 복잡한 작업에서 훨씬 더 까다롭다는 것에 있다.
이 논문은 3D 프린팅을 활용해 가구 조립 작업을 쉽게 실 환경에서 재현할 수 있게 하는 벤치마크를 제시했다. 또한 대량의 원격 조종(teleoperation) 데이터를 제공해 길고 복잡한 작업을 수행하는 알고리즘을 다양하게 개발 및 비교할 수 있는 표준을 제안했다. 결과적으로 이 논문은 길고 복잡한 작업의 수행을 학계의 새로운 방향으로 제시하였고 동시에 실제 환경에서의 실험을 가능하게 함으로써 다양한 연구 촉진 효과를 기대하게 하였다.
임재환 교수는 “최고의 로봇 학회 중 하나인 RSS에서 수상하게 되어 기쁘고, 국내 로봇 및 인공지능 연구의 미래에 도움이 된다면 기쁠 것 같다”고 소감을 밝혔다.
또한 임 교수는 “고령화 및 1인 가구 사회로 접어듦에 따라 로봇의 일상생활 활용 방안이 많아지고, 일상생활에 가까운 로봇일수록 실 환경 로봇 수행 능력 평가가 중요해지는 상황에서 이 연구가 후속 연구의 기반이 되기를 기대한다”고 전했다.
김재철AI대학원 허민호, 이두현 석사과정생은 로봇 러닝 분야에서 세계적인 연구자가 되겠다는 포부를 밝혔다. 임재환 교수 연구실 졸업생 이영운 박사 역시 연세대학교 인공지능학과에 임용되어 로봇 러닝 연구를 진행할 예정이다.
논문명: FurnitureBench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation. Robotics: Science and Systems
2023.07.28 조회수 3084
임재환 교수팀, 국내 최초 국제로보틱스학회(RSS) 논문상 수상
우리 대학 김재철AI대학원 임재환 교수팀이 로보틱스: 과학 및 시스템 학회 2023(Robotics: Science and Systems, 이하 RSS)에서 국내 최초로 최고 시스템 논문상(Best System Paper Award)을 수상했다고 28일 밝혔다.
RSS는 로봇 과학과 시스템에 관한 세계 최고의 국제 학회 중 하나로서, 로봇 공학과 로봇 학습 분야의 최신 연구 결과 및 기술적 진전을 발표하고 공유하는 학회다. RSS 최고 시스템 논문상은 실제 로봇 시스템 구현 및 실험 결과에 초점을 두고 있는 논문 중 가장 뛰어난 논문에 수여되는 상이다.
김재철AI대학원 석사과정생 2명과 졸업생 1명(곧 연세대 임용예정)으로 이루어진 임재환 교수팀의 RSS 학회 수상은 한국인으로는 최초이며 국내 기관 연구로도 최초 사례다.
최근 인공지능 및 딥러닝(Deep learning) 알고리즘 기술의 발전으로 로봇 분야는 성공적인 성과를 내고 있다. 하지만 대부분 성과는 실제 환경에서의 복잡하고 긴 작업(물류, 집안일 등)에 대한 해결보다는 시뮬레이션 환경에서의 짧고 간단한 작업(걷기, 물건 집기 등)에 국한돼 있다. 그 이유는 학습 기반 인공지능 기술의 개발 및 검증에 필수인 데이터 구축이 다른 분야에 비해 실제 복잡한 작업에서 훨씬 더 까다롭다는 것에 있다.
이 논문은 3D 프린팅을 활용해 가구 조립 작업을 쉽게 실 환경에서 재현할 수 있게 하는 벤치마크를 제시했다. 또한 대량의 원격 조종(teleoperation) 데이터를 제공해 길고 복잡한 작업을 수행하는 알고리즘을 다양하게 개발 및 비교할 수 있는 표준을 제안했다. 결과적으로 이 논문은 길고 복잡한 작업의 수행을 학계의 새로운 방향으로 제시하였고 동시에 실제 환경에서의 실험을 가능하게 함으로써 다양한 연구 촉진 효과를 기대하게 하였다.
임재환 교수는 “최고의 로봇 학회 중 하나인 RSS에서 수상하게 되어 기쁘고, 국내 로봇 및 인공지능 연구의 미래에 도움이 된다면 기쁠 것 같다”고 소감을 밝혔다.
또한 임 교수는 “고령화 및 1인 가구 사회로 접어듦에 따라 로봇의 일상생활 활용 방안이 많아지고, 일상생활에 가까운 로봇일수록 실 환경 로봇 수행 능력 평가가 중요해지는 상황에서 이 연구가 후속 연구의 기반이 되기를 기대한다”고 전했다.
김재철AI대학원 허민호, 이두현 석사과정생은 로봇 러닝 분야에서 세계적인 연구자가 되겠다는 포부를 밝혔다. 임재환 교수 연구실 졸업생 이영운 박사 역시 연세대학교 인공지능학과에 임용되어 로봇 러닝 연구를 진행할 예정이다.
논문명: FurnitureBench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation. Robotics: Science and Systems
2023.07.28 조회수 3084 -
 전산학부 오혜연 교수, RSS 2023 기조강연 진행
전산학부 오혜연 교수가 2023년 7월 11일 대구 엑스코에서 개최된 '2023 로봇공학, 과학 및 시스템 컨퍼런스(Robotics: Science and Systems, 이하 RSS 2023)' 초청을 받아 기조강연을 진행했다.
발표 제목은 "Toward Culturally Intelligent Language Models" 로 최근 많은 주목을 받고 있는 대형언어모델(Large Langue Models; LLM)이 문화적 지식 및 지능을 갖기 위해 어떤 연구를 해야 하는지에 대한 내용으로 강연을 진행했다.
RSS 2023은 2005년부터 개최된 Robotics 분야의 저명 컨퍼런스로 이번 컨퍼런스는 아시아에서 처음 개최되었다.
이번 RSS 2023에는 전 세계의 AI와 로봇 분야 연구자들과 아마존 로보틱스, 토요타 연구소, 한화시스템 등 세계적 기업을 포함해 40개국에서 온 800여 명이 참여했으며 세계적인 석학 초청 기조 강연, 25개의 워크숍, 112개의 논문 발표, 포스터 세션으로 진행되었다.
2023.07.17 조회수 2034
전산학부 오혜연 교수, RSS 2023 기조강연 진행
전산학부 오혜연 교수가 2023년 7월 11일 대구 엑스코에서 개최된 '2023 로봇공학, 과학 및 시스템 컨퍼런스(Robotics: Science and Systems, 이하 RSS 2023)' 초청을 받아 기조강연을 진행했다.
발표 제목은 "Toward Culturally Intelligent Language Models" 로 최근 많은 주목을 받고 있는 대형언어모델(Large Langue Models; LLM)이 문화적 지식 및 지능을 갖기 위해 어떤 연구를 해야 하는지에 대한 내용으로 강연을 진행했다.
RSS 2023은 2005년부터 개최된 Robotics 분야의 저명 컨퍼런스로 이번 컨퍼런스는 아시아에서 처음 개최되었다.
이번 RSS 2023에는 전 세계의 AI와 로봇 분야 연구자들과 아마존 로보틱스, 토요타 연구소, 한화시스템 등 세계적 기업을 포함해 40개국에서 온 800여 명이 참여했으며 세계적인 석학 초청 기조 강연, 25개의 워크숍, 112개의 논문 발표, 포스터 세션으로 진행되었다.
2023.07.17 조회수 2034 -
 로봇공학학제전공, 삼성전자와 로봇 특화 인재 육성
우리 대학은 삼성전자와 '삼성전자 로보틱스 인재양성 프로그램(로봇 트랙) 협약'을 13일 체결했다.
이날 협약식에는 전경훈 삼성리서치 사장과 이승섭 교학부총장 등이 참석했다.이 프로그램은 채용연계형 석사 과정으로, 우리 대학과 삼성전자는 2023학년도부터 매년 10명의 장학생을 선발한다. 심화된 이론과 실무 역량을 겸비할 수 있는 로보틱스 관련 커리큘럼이 진행될 예정이다. 학생들은 재학 기간 동안 등록금과 학비 보조금 등 산학장학금을 지원받고, 학위 취득과 동시에 삼성전자에 입사하게 된다. 또한 삼성전자 현장실습, 로봇 학회와 해외 전시회 참관의 기회도 제공받는다.전경훈 삼성리서치 사장은 "빠르게 성장하는 로봇 시장의 변화에 발맞춰 로봇 분야에 전문화된 인재 양성을 위해 프로그램을 신설했다"라며, "로봇을 차세대 신성장동력으로 육성하기 위해 적극 지원하겠다"고 말했다.
이승섭 부총장은 "최근 미래산업인 로봇관련 기술의 중요성이 주목받으며 관련 기술의 급격한 발전이 이루어지는 상황에서 삼성전자와의 협력을 통하여 미래성장동력을 확보하고 새로운 트렌드를 개척해 나갈 예정"이라고 밝혔다.삼성전자는 "로봇 관련 인재 양성 프로그램을 서울대로도 확대하고, 로봇 특화 인력 육성을 기반으로 핵심기술 확보에 더욱 주력할 계획"이라고 밝혔다. 한편, 삼성전자는 AI, 차세대 통신, 반도체 등 중점 분야에서 계약학과, 연합전공, 양성 트랙 등을 통해 맞춤형 인재를 지속적으로 양성하고 있다.
2023.02.14 조회수 4481
로봇공학학제전공, 삼성전자와 로봇 특화 인재 육성
우리 대학은 삼성전자와 '삼성전자 로보틱스 인재양성 프로그램(로봇 트랙) 협약'을 13일 체결했다.
이날 협약식에는 전경훈 삼성리서치 사장과 이승섭 교학부총장 등이 참석했다.이 프로그램은 채용연계형 석사 과정으로, 우리 대학과 삼성전자는 2023학년도부터 매년 10명의 장학생을 선발한다. 심화된 이론과 실무 역량을 겸비할 수 있는 로보틱스 관련 커리큘럼이 진행될 예정이다. 학생들은 재학 기간 동안 등록금과 학비 보조금 등 산학장학금을 지원받고, 학위 취득과 동시에 삼성전자에 입사하게 된다. 또한 삼성전자 현장실습, 로봇 학회와 해외 전시회 참관의 기회도 제공받는다.전경훈 삼성리서치 사장은 "빠르게 성장하는 로봇 시장의 변화에 발맞춰 로봇 분야에 전문화된 인재 양성을 위해 프로그램을 신설했다"라며, "로봇을 차세대 신성장동력으로 육성하기 위해 적극 지원하겠다"고 말했다.
이승섭 부총장은 "최근 미래산업인 로봇관련 기술의 중요성이 주목받으며 관련 기술의 급격한 발전이 이루어지는 상황에서 삼성전자와의 협력을 통하여 미래성장동력을 확보하고 새로운 트렌드를 개척해 나갈 예정"이라고 밝혔다.삼성전자는 "로봇 관련 인재 양성 프로그램을 서울대로도 확대하고, 로봇 특화 인력 육성을 기반으로 핵심기술 확보에 더욱 주력할 계획"이라고 밝혔다. 한편, 삼성전자는 AI, 차세대 통신, 반도체 등 중점 분야에서 계약학과, 연합전공, 양성 트랙 등을 통해 맞춤형 인재를 지속적으로 양성하고 있다.
2023.02.14 조회수 4481 -
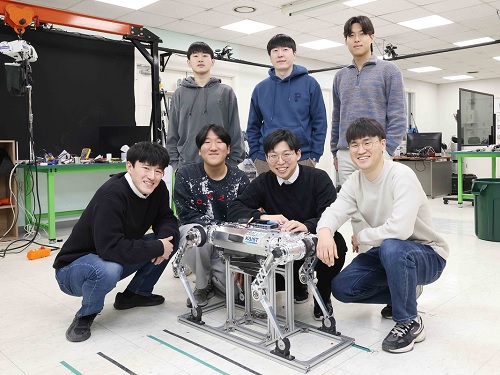 ‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26 조회수 5421
‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26 조회수 5421 -
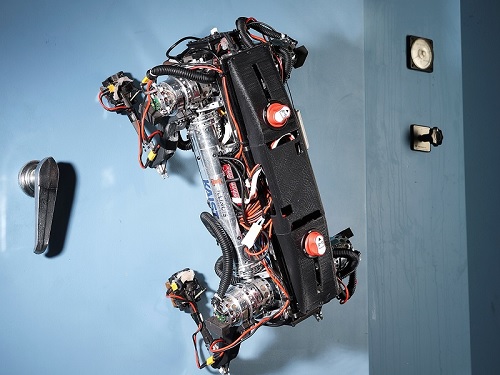 세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26 조회수 6186
세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26 조회수 6186 -
 KAIST 창업기업 2곳, 국제전자제품박람회(CES2023) 혁신상 수상
우리 대학 전산학부 신인식 교수가 설립한 교원창업기업인 플루이즈(Fluiz)와 전기및전자공학부 명현 교수팀이 기술을 이전한 기업인 힐스로보틱스(구 힐스엔지니어링)가 미국 라스베이거스에서 해마다 열리는 세계 최대 규모의 신기술 박람회인 ‘국제전자제품박람회(CES 2023)’에서 `소프트웨어 및 모바일 앱' 부문과 `로보틱스' 부문에서 각각 CES 2023 혁신상을 수상했다고 17일 밝혔다.
플루이즈의 차세대 멀티-디바이스 모바일 플랫폼 플루이드(FLUID)는 세계 최초의 멀티-디바이스 모바일 플랫폼으로, 하나의 스마트 기기 내에서만 사용되던 기존 모바일 앱들을 여러 스마트 기기에 걸쳐 유기적으로 분산 사용할 수 있다.
대표적으로, 한 앱의 여러 UI(사용자 인터페이스, User Interface) 요소들을 여러 기기로 자유롭게 분산해 사용할 수 있으며 이는 단일-기기 앱 패러다임(한 앱은 하나의 기기를 통해서만 사용)에 고착돼 있던 기존의 모바일 생태계를 새로운 다중-기기(Multi-device) 패러다임으로 진화시킬 것으로 기대된다.
플루이드(FLUID)의 혁신적인 장점 중 하나는 기존 모바일 앱에 코드 수정을 요구하지 않는다는 것이다. 이는 기존 모바일 앱의 코드를 일절 수정하지 않아도 플랫폼 자체적으로 멀티-디바이스 UX를 제공하기 때문에 시판 중인 모바일 앱을 즉시 다중-기기 환경에서 사용할 수 있다.
신인식 교수는 모바일 통신 및 컴퓨팅 분야에서 세계 최고 권위의 학회인 ACM 모비시스(MobiSys), ACM 모비컴(MobiCom) 등을 통해 해당 플랫폼에 사용된 기술에 대한 연구 논문을 발표했으며, 지난 2019년 관련 논문 “FLUID: Flexible User Interface Distribution for Ubiquitous Multi-device Interaction”을 통해 한국 최초로 ‘ACM 모비컴(MobiCom) 최우수 논문상(Best Paper Award)’을 수상한 바 있다.
한편 힐스로보틱스의 하이봇은 명현 교수팀의 저가형 2차원 레이저 스캐너를 이용한 계층적 구조 기반의 3차원 고정밀 맵 제작 기술(이하 SLAM) 기반의 자율주행 첨단 로봇이다. 이는 다음과 같은 기술적 차별성으로 혁신상을 수상했다.
첫째, 효과적인 비대면 회의 지원 기능이다. 기존의 2D 홀로그램 표현방식이 아닌, 360도 전 방향 입체 홀로그램 기술을 활용해 세계 최소 메타버스형, 도슨트/비대면 회의 지원 기능을 구현했다.
둘째, 팬데믹 시대에 부응하는 질병 확산 방지 및 방역 기능이다. 비접촉식 터치스크린 방식을 활용해 접촉으로 인한 오염전파를 차단하며, 플라즈마 공기 방역 기능을 제공한다.
마지막으로, 인공지능 및 SLAM 기반 자율주행 지능형 플랫폼 솔로만(SOLOMAN)을 내장한 다기능 이동형 플랫폼으로 다양한 환경에서 사용가능하다.
이 외에도 다양한 실내 환경 및 고객 취향을 고려한 살균/공기 청정/테라피 기능을 고루 갖췄다는 점에서 위드코로나 시대에 적합한 인공지능 기반 방역/도슨트/안내 로봇이라고 볼 수 있으며, 국내·외 박물관, 병원, 공항 등 다중 이용 공공장소에서 활용할 수 있을 것으로 기대된다.
명현 교수팀이 기술을 이전한 힐스로보틱스(구 힐스엔지니어링(Hills Engineering))는 CES 2023 하이봇(Hi-bot) 외에도 CES 2021 코로봇(Coro-bot), CES 2022 헤이봇(Hey-bot)으로 CES 혁신상을 수상한 바 있다.
우리 대학 이광형 총장은 "KAIST의 우수한 연구실적들이 기술사업화되고 국제적으로도 인정받고 있다ˮ며, "앞으로도 기술창업, 실험실 창업 활성화를 위해 교원과 학생에 대한 창업 지원을 아끼지 않을 것ˮ이라고 밝혔다.
2022.11.17 조회수 4243
KAIST 창업기업 2곳, 국제전자제품박람회(CES2023) 혁신상 수상
우리 대학 전산학부 신인식 교수가 설립한 교원창업기업인 플루이즈(Fluiz)와 전기및전자공학부 명현 교수팀이 기술을 이전한 기업인 힐스로보틱스(구 힐스엔지니어링)가 미국 라스베이거스에서 해마다 열리는 세계 최대 규모의 신기술 박람회인 ‘국제전자제품박람회(CES 2023)’에서 `소프트웨어 및 모바일 앱' 부문과 `로보틱스' 부문에서 각각 CES 2023 혁신상을 수상했다고 17일 밝혔다.
플루이즈의 차세대 멀티-디바이스 모바일 플랫폼 플루이드(FLUID)는 세계 최초의 멀티-디바이스 모바일 플랫폼으로, 하나의 스마트 기기 내에서만 사용되던 기존 모바일 앱들을 여러 스마트 기기에 걸쳐 유기적으로 분산 사용할 수 있다.
대표적으로, 한 앱의 여러 UI(사용자 인터페이스, User Interface) 요소들을 여러 기기로 자유롭게 분산해 사용할 수 있으며 이는 단일-기기 앱 패러다임(한 앱은 하나의 기기를 통해서만 사용)에 고착돼 있던 기존의 모바일 생태계를 새로운 다중-기기(Multi-device) 패러다임으로 진화시킬 것으로 기대된다.
플루이드(FLUID)의 혁신적인 장점 중 하나는 기존 모바일 앱에 코드 수정을 요구하지 않는다는 것이다. 이는 기존 모바일 앱의 코드를 일절 수정하지 않아도 플랫폼 자체적으로 멀티-디바이스 UX를 제공하기 때문에 시판 중인 모바일 앱을 즉시 다중-기기 환경에서 사용할 수 있다.
신인식 교수는 모바일 통신 및 컴퓨팅 분야에서 세계 최고 권위의 학회인 ACM 모비시스(MobiSys), ACM 모비컴(MobiCom) 등을 통해 해당 플랫폼에 사용된 기술에 대한 연구 논문을 발표했으며, 지난 2019년 관련 논문 “FLUID: Flexible User Interface Distribution for Ubiquitous Multi-device Interaction”을 통해 한국 최초로 ‘ACM 모비컴(MobiCom) 최우수 논문상(Best Paper Award)’을 수상한 바 있다.
한편 힐스로보틱스의 하이봇은 명현 교수팀의 저가형 2차원 레이저 스캐너를 이용한 계층적 구조 기반의 3차원 고정밀 맵 제작 기술(이하 SLAM) 기반의 자율주행 첨단 로봇이다. 이는 다음과 같은 기술적 차별성으로 혁신상을 수상했다.
첫째, 효과적인 비대면 회의 지원 기능이다. 기존의 2D 홀로그램 표현방식이 아닌, 360도 전 방향 입체 홀로그램 기술을 활용해 세계 최소 메타버스형, 도슨트/비대면 회의 지원 기능을 구현했다.
둘째, 팬데믹 시대에 부응하는 질병 확산 방지 및 방역 기능이다. 비접촉식 터치스크린 방식을 활용해 접촉으로 인한 오염전파를 차단하며, 플라즈마 공기 방역 기능을 제공한다.
마지막으로, 인공지능 및 SLAM 기반 자율주행 지능형 플랫폼 솔로만(SOLOMAN)을 내장한 다기능 이동형 플랫폼으로 다양한 환경에서 사용가능하다.
이 외에도 다양한 실내 환경 및 고객 취향을 고려한 살균/공기 청정/테라피 기능을 고루 갖췄다는 점에서 위드코로나 시대에 적합한 인공지능 기반 방역/도슨트/안내 로봇이라고 볼 수 있으며, 국내·외 박물관, 병원, 공항 등 다중 이용 공공장소에서 활용할 수 있을 것으로 기대된다.
명현 교수팀이 기술을 이전한 힐스로보틱스(구 힐스엔지니어링(Hills Engineering))는 CES 2023 하이봇(Hi-bot) 외에도 CES 2021 코로봇(Coro-bot), CES 2022 헤이봇(Hey-bot)으로 CES 혁신상을 수상한 바 있다.
우리 대학 이광형 총장은 "KAIST의 우수한 연구실적들이 기술사업화되고 국제적으로도 인정받고 있다ˮ며, "앞으로도 기술창업, 실험실 창업 활성화를 위해 교원과 학생에 대한 창업 지원을 아끼지 않을 것ˮ이라고 밝혔다.
2022.11.17 조회수 4243 -
 2022 스페이스 로보틱스 국제워크숍 개최
우리 대학 항공우주공학과와 전자·전기공학부가 11월 9일(수) 기계공학동 공동강의실(N7 #1501)에서 '2022 스페이스 로보틱스 국제워크숍'을 개최한다.
뉴스페이스 시대의 도래와 함께 우주개발 주도권을 확보하기 위한 경쟁은 더욱 치열해지고 있다. 그에 따라 인공위성 유지 보수부터 미개척 행성 탐사, 자원 채굴까지 미래 우주 임무는 점점 다양해지고 고도화될 것으로 예측되며, 위험한 환경에서 인간을 대신하여 다양한 임무를 수행할 수 있는 로보틱스 기술의 중요성은 더욱 급격히 증가할 것으로 전망된다.
이번 워크샵은 스페이스 로보틱스 분야를 선도하고 있는 DLR Robotics Institute의 소장 알린 알부 셰퍼(Alin Albu Schaeffer) 박사, NASA AMES 연구 센터의 테리 펑(Terry Fong) 박사를 비롯하여 10명의 국내외 연사가 참여한다. 스페이스 로보틱스 연구 발표를 중심으로 최신 기술 동향 전파 및 기술교류의 장을 마련하고, 국제적 기술교류 네트워크를 통해 관련 분야 연구인력 확산 및 학문적인 연구 분위기 조성하는 계기를 마련할 예정이다.
이대영 KAIST 항공우주공학과 교수는 "이제 국내에서도 스페이스 로보틱스 기술에 관한 관심이 점점 높아지고 있는 상황"이라고 강조했다. 또한, 김민준 KAIST 전자및전기공학부 교수도 "국내 스페이스 로보틱스 분야 연구원들이 최신 기술 및 활용에 관한 폭넓은 지식을 얻고 글로벌 네트워크를 구축하는 좋은 기회가 될 것"이라고 말했다.
이번 워크숍은 2022년도 KAIST-DLR 스페이스 로보틱스 R&D 국제 네트워크 구축 사업의 일환으로 KAIST BK21 FOUR 사업단, KAIST Institute for Robotics의 후원을 받아 진행된다. 자세한 내용 및 프로그램은 항공우주공학과 홈페이지(https://ae.kaist.ac.kr)에서 확인할 수 있다. 문의: 항공우주공학과 이대영 교수(ae_dylee@kaist.ac.kr) / 이창훈 선임행정원 (h153214@kaist.ac.kr, +82-42-350-3708)
2022.11.01 조회수 3881
2022 스페이스 로보틱스 국제워크숍 개최
우리 대학 항공우주공학과와 전자·전기공학부가 11월 9일(수) 기계공학동 공동강의실(N7 #1501)에서 '2022 스페이스 로보틱스 국제워크숍'을 개최한다.
뉴스페이스 시대의 도래와 함께 우주개발 주도권을 확보하기 위한 경쟁은 더욱 치열해지고 있다. 그에 따라 인공위성 유지 보수부터 미개척 행성 탐사, 자원 채굴까지 미래 우주 임무는 점점 다양해지고 고도화될 것으로 예측되며, 위험한 환경에서 인간을 대신하여 다양한 임무를 수행할 수 있는 로보틱스 기술의 중요성은 더욱 급격히 증가할 것으로 전망된다.
이번 워크샵은 스페이스 로보틱스 분야를 선도하고 있는 DLR Robotics Institute의 소장 알린 알부 셰퍼(Alin Albu Schaeffer) 박사, NASA AMES 연구 센터의 테리 펑(Terry Fong) 박사를 비롯하여 10명의 국내외 연사가 참여한다. 스페이스 로보틱스 연구 발표를 중심으로 최신 기술 동향 전파 및 기술교류의 장을 마련하고, 국제적 기술교류 네트워크를 통해 관련 분야 연구인력 확산 및 학문적인 연구 분위기 조성하는 계기를 마련할 예정이다.
이대영 KAIST 항공우주공학과 교수는 "이제 국내에서도 스페이스 로보틱스 기술에 관한 관심이 점점 높아지고 있는 상황"이라고 강조했다. 또한, 김민준 KAIST 전자및전기공학부 교수도 "국내 스페이스 로보틱스 분야 연구원들이 최신 기술 및 활용에 관한 폭넓은 지식을 얻고 글로벌 네트워크를 구축하는 좋은 기회가 될 것"이라고 말했다.
이번 워크숍은 2022년도 KAIST-DLR 스페이스 로보틱스 R&D 국제 네트워크 구축 사업의 일환으로 KAIST BK21 FOUR 사업단, KAIST Institute for Robotics의 후원을 받아 진행된다. 자세한 내용 및 프로그램은 항공우주공학과 홈페이지(https://ae.kaist.ac.kr)에서 확인할 수 있다. 문의: 항공우주공학과 이대영 교수(ae_dylee@kaist.ac.kr) / 이창훈 선임행정원 (h153214@kaist.ac.kr, +82-42-350-3708)
2022.11.01 조회수 3881 -
 유지환 교수, IEEE 로보틱스 및 자동화 학술회 특훈강연교수 프로그램 위원장 선임
우리 대학 건설및환경공학과 유지환 교수가 로봇분야 세계 최고권위의 국제전기전자공학회(IEEE) 로보틱스 및 자동화 학술회(Robotics and Automation Society)에서 운영하는 특훈강연교수(Distinguished Lecturers) 프로그램 전체총괄을 담당하는 위원장(chair)에 선임됐다.
국제전기전자공학회 로보틱스 및 자동화 학술회의 특훈강연교수 프로그램은 로봇분야 우수강의 및 교육콘텐츠를 접할 기회가 없는 개발도상국가 학생들을 대상으로 로봇분야 강의 및 특강 서비스를 제공할 목적으로 국제전기전자공학회 로보틱스 및 자동화 학술회 산하의 기술분과(Technical Committees) 중심으로 운영되는 프로그램으로서, 전체 21개의 기술분과에서 약 63명의 세계적으로 저명한 석학들로 구성 된 특훈강연교수들이 활동하고 있다. 이번에 특훈강연교수 프로그램의 위원장을 맡게 된 유지환 교수는 신규 특훈강연교수의 발굴 및 승인에서부터 전체 프로그램의 운영에 이르기까지의 역할을 담당하게 된다.
2022.03.24 조회수 4994
유지환 교수, IEEE 로보틱스 및 자동화 학술회 특훈강연교수 프로그램 위원장 선임
우리 대학 건설및환경공학과 유지환 교수가 로봇분야 세계 최고권위의 국제전기전자공학회(IEEE) 로보틱스 및 자동화 학술회(Robotics and Automation Society)에서 운영하는 특훈강연교수(Distinguished Lecturers) 프로그램 전체총괄을 담당하는 위원장(chair)에 선임됐다.
국제전기전자공학회 로보틱스 및 자동화 학술회의 특훈강연교수 프로그램은 로봇분야 우수강의 및 교육콘텐츠를 접할 기회가 없는 개발도상국가 학생들을 대상으로 로봇분야 강의 및 특강 서비스를 제공할 목적으로 국제전기전자공학회 로보틱스 및 자동화 학술회 산하의 기술분과(Technical Committees) 중심으로 운영되는 프로그램으로서, 전체 21개의 기술분과에서 약 63명의 세계적으로 저명한 석학들로 구성 된 특훈강연교수들이 활동하고 있다. 이번에 특훈강연교수 프로그램의 위원장을 맡게 된 유지환 교수는 신규 특훈강연교수의 발굴 및 승인에서부터 전체 프로그램의 운영에 이르기까지의 역할을 담당하게 된다.
2022.03.24 조회수 4994 -
 KI-로보틱스, 『2021 현대자동차 자율주행 챌린지』 최종 우승 차지
우리 대학 자율주행 개발팀 'KI-로보틱스(지도교수 심현철)'팀이 29일(월)에 서울 상암동 ‘자율주행자동차 시범운행지구’에서 개최된 『2021 현대자동차 자율주행 챌린지』 본선에서 최종 우승을 차지했다.이 대회는 국내 대학의 자율주행 기술 개발을 독려하고 우수 인재를 육성하기 위해 현대차그룹이 2010년부터 시행한 국내 최대의 대학생 대상 자율주행차 경진대회이다.
올해는 총 23개 대학이 참가했으며 이 중 KAIST, 성균관대, 인천대, 충북대, 인하대, 계명대 6개 대학이 예선을 거쳐 본선에 올랐다. 29일(월) 본선에는 오세훈 서울시장을 비롯해 박정국 현대차 사장, 박동일 현대차 부사장, 서정식 현대오토에버 대표이사, 장재호 현대모비스 전무 등이 참석했다.
대회는 교통이 통제된 시범운행지구 내 총 4㎞ 구간에서 자율주행 차량 6대가 동시에 주행하는 방식으로 진행했다. ▲차량 회피 및 추월 ▲교차로 통과 ▲신호등·차선·제한속도·스쿨존 등 도심 교통법규를 준수하면서 정해진 코스를 주행했다. 제한 시간 내에 빨리 완주한 순으로 순위를 매기되 법규 위반 항목에 대해서는 점수를 차감하는 방식으로 평가했다. 비상 상황을 대비해 차량에는 운전자와 평가자가 탑승했으며 주행 모습을 무대에 마련된 대형 스크린 및 유튜브를 통해 실시간으로 중계했다.
KI-로보틱스는 1차 시기에서 인천대와 접전을 펼친 끝에 11분 27초로 피니쉬 라인을 1등으로 통과했다. 2차 시기는 신호 등 교통 상황으로 인해 16분대에 들어왔으나 최종적으로 11분 27초의 기록으로 6개 대학 가운데 1위를 차지했다. 또한 페널티를 받지 않아 감점 점수가 없었다.
특히 눈여겨볼 점은 KI-로보틱스가 속도보다는 차량의 인지 판단 위주로 알고리즘을 설계했다는 것이다. 본선에 오른 6개 대학 중 유일하게 GPS(위치측정 시스템)를 차량에서 제외하여 GPS의 위험성을 최소화하는 전략을 실행했다.
이는 도심 환경에서 GPS 수신이 안정적이지 않아 위치에 오차가 생기면 안전한 주행에 문제가 생길 수 있다는 점을 고려한 것이었다. 대안으로 라이다 센서 3개와 차량 앞뒤에 카메라를 각각 한 개씩 탑재하고 자체 개발한 도심 맞춤형 SLAM 기술로 정밀 맵을 구축 및 측위 기술을 구현하였다.
또한 고속 주행에 주력한 다른 팀들에 비해 다른 차들의 위치를 고려한 추월 경로 생성 기술을 개발하여 실제 도심 교통법규를 원활히 준수하는 동시에 앞차를 추월하는 등의 장애물을 회피해야 하는 상황에 대응하는 데 유리했다. 이를 통해 1~2차 시기 통틀어 우리 대학이 가장 빠른 구간기록을 기록할 수 있었다.
우리 대학 KI-로보틱스 팀장인 전기및전자공학부 박사과정 이대규 학생은 "예선전 4위로 출발 위치가 예상보다 뒤에 배정되는 변수에도 앞차를 추월해 결국 구간기록 기록을 줄일 수 있었다” 라고 설명했다.
지도교수인 심현철 교수는 "지난 10여 년간 우리 연구실에서 독자적으로 자율주행 기술을 자체 개발하여 온 노력이 열매를 맺어 매우 기쁘게 생각하며, 어려운 여건에도 불구하고 최선 이상의 노력을 기울인 이대규 팀장과 개발에 참여한 모든 학생에게 감사의 말을 전한다” 라고 말했다.
우승의 영예를 안은 우리 대학의 KI-로보틱스팀(11분 27초) 다음으로 충북대(13분 31초)가 준우승을, 인천대(14분 19초)가 3위을 차지했다. 이어서 4위 인하대, 5위 성균관대, 6위 계명대 순으로 입상했다.
우승팀은 상금 1억 원과 함께 북미 견학 기회를 얻었으며 준우승팀은 상금 5000만 원과 함께 중국 견학 기회를 얻었다. 3위를 기록한 인천대(14분 19초)는 상금 3000만 원, 4위 인하대는 상금 1000만 원, 5위 성균관대와 6위 계명대는 각각 상금 500만 원을 받았다.
이대규 팀장은 "인생에서 가장 벅찬 순간이다. 팀원들과 17개월 동안 달려온 시간이 생각나 눈물이 날 것 같다. 함께 대회 준비한 팀원들에게 고맙고 무엇보다 이렇게 연구할 수 있게 지원해주신 교수님께 감사드린다” 라고 소감을 전했다.
현대차그룹 관계자는 "이번 대회는 국내 최초로 전기차 기반으로 실제 도심 교통환경에서 여러 대의 자율주행 차량이 동시에 주행하며 기술 시연을 펼쳤다는 점에서 의의가 있다”라고 말했다. 이어, "앞으로도 대학 및 지자체와 유기적으로 협력해 자율주행 생태계를 공고히 구축하는 데 지속해서 앞장서겠다” 라고 밝혔다.
2021.11.30 조회수 6118
KI-로보틱스, 『2021 현대자동차 자율주행 챌린지』 최종 우승 차지
우리 대학 자율주행 개발팀 'KI-로보틱스(지도교수 심현철)'팀이 29일(월)에 서울 상암동 ‘자율주행자동차 시범운행지구’에서 개최된 『2021 현대자동차 자율주행 챌린지』 본선에서 최종 우승을 차지했다.이 대회는 국내 대학의 자율주행 기술 개발을 독려하고 우수 인재를 육성하기 위해 현대차그룹이 2010년부터 시행한 국내 최대의 대학생 대상 자율주행차 경진대회이다.
올해는 총 23개 대학이 참가했으며 이 중 KAIST, 성균관대, 인천대, 충북대, 인하대, 계명대 6개 대학이 예선을 거쳐 본선에 올랐다. 29일(월) 본선에는 오세훈 서울시장을 비롯해 박정국 현대차 사장, 박동일 현대차 부사장, 서정식 현대오토에버 대표이사, 장재호 현대모비스 전무 등이 참석했다.
대회는 교통이 통제된 시범운행지구 내 총 4㎞ 구간에서 자율주행 차량 6대가 동시에 주행하는 방식으로 진행했다. ▲차량 회피 및 추월 ▲교차로 통과 ▲신호등·차선·제한속도·스쿨존 등 도심 교통법규를 준수하면서 정해진 코스를 주행했다. 제한 시간 내에 빨리 완주한 순으로 순위를 매기되 법규 위반 항목에 대해서는 점수를 차감하는 방식으로 평가했다. 비상 상황을 대비해 차량에는 운전자와 평가자가 탑승했으며 주행 모습을 무대에 마련된 대형 스크린 및 유튜브를 통해 실시간으로 중계했다.
KI-로보틱스는 1차 시기에서 인천대와 접전을 펼친 끝에 11분 27초로 피니쉬 라인을 1등으로 통과했다. 2차 시기는 신호 등 교통 상황으로 인해 16분대에 들어왔으나 최종적으로 11분 27초의 기록으로 6개 대학 가운데 1위를 차지했다. 또한 페널티를 받지 않아 감점 점수가 없었다.
특히 눈여겨볼 점은 KI-로보틱스가 속도보다는 차량의 인지 판단 위주로 알고리즘을 설계했다는 것이다. 본선에 오른 6개 대학 중 유일하게 GPS(위치측정 시스템)를 차량에서 제외하여 GPS의 위험성을 최소화하는 전략을 실행했다.
이는 도심 환경에서 GPS 수신이 안정적이지 않아 위치에 오차가 생기면 안전한 주행에 문제가 생길 수 있다는 점을 고려한 것이었다. 대안으로 라이다 센서 3개와 차량 앞뒤에 카메라를 각각 한 개씩 탑재하고 자체 개발한 도심 맞춤형 SLAM 기술로 정밀 맵을 구축 및 측위 기술을 구현하였다.
또한 고속 주행에 주력한 다른 팀들에 비해 다른 차들의 위치를 고려한 추월 경로 생성 기술을 개발하여 실제 도심 교통법규를 원활히 준수하는 동시에 앞차를 추월하는 등의 장애물을 회피해야 하는 상황에 대응하는 데 유리했다. 이를 통해 1~2차 시기 통틀어 우리 대학이 가장 빠른 구간기록을 기록할 수 있었다.
우리 대학 KI-로보틱스 팀장인 전기및전자공학부 박사과정 이대규 학생은 "예선전 4위로 출발 위치가 예상보다 뒤에 배정되는 변수에도 앞차를 추월해 결국 구간기록 기록을 줄일 수 있었다” 라고 설명했다.
지도교수인 심현철 교수는 "지난 10여 년간 우리 연구실에서 독자적으로 자율주행 기술을 자체 개발하여 온 노력이 열매를 맺어 매우 기쁘게 생각하며, 어려운 여건에도 불구하고 최선 이상의 노력을 기울인 이대규 팀장과 개발에 참여한 모든 학생에게 감사의 말을 전한다” 라고 말했다.
우승의 영예를 안은 우리 대학의 KI-로보틱스팀(11분 27초) 다음으로 충북대(13분 31초)가 준우승을, 인천대(14분 19초)가 3위을 차지했다. 이어서 4위 인하대, 5위 성균관대, 6위 계명대 순으로 입상했다.
우승팀은 상금 1억 원과 함께 북미 견학 기회를 얻었으며 준우승팀은 상금 5000만 원과 함께 중국 견학 기회를 얻었다. 3위를 기록한 인천대(14분 19초)는 상금 3000만 원, 4위 인하대는 상금 1000만 원, 5위 성균관대와 6위 계명대는 각각 상금 500만 원을 받았다.
이대규 팀장은 "인생에서 가장 벅찬 순간이다. 팀원들과 17개월 동안 달려온 시간이 생각나 눈물이 날 것 같다. 함께 대회 준비한 팀원들에게 고맙고 무엇보다 이렇게 연구할 수 있게 지원해주신 교수님께 감사드린다” 라고 소감을 전했다.
현대차그룹 관계자는 "이번 대회는 국내 최초로 전기차 기반으로 실제 도심 교통환경에서 여러 대의 자율주행 차량이 동시에 주행하며 기술 시연을 펼쳤다는 점에서 의의가 있다”라고 말했다. 이어, "앞으로도 대학 및 지자체와 유기적으로 협력해 자율주행 생태계를 공고히 구축하는 데 지속해서 앞장서겠다” 라고 밝혔다.
2021.11.30 조회수 6118