-
 KAIST미술관이 기획한 롯데월드 서울스카이 초청 전시, “다누리의 스펙타클 365”
우리 대학이 이달 20일부터 대한민국 최초의 달 탐사선인 다누리의 달 궤도 임무운영 1주년을 기념하기 위한 전시회를 ㈜롯데월드 서울스카이(SEOUL SKY)에서 개최한다. '다누리의 스펙타클 365'는 KAIST 미술관이 지난 6월부터 8월까지 본교 창의학습관에서 진행했던 '다누리의 스펙타클' 전시의 연장선이다. 대한민국 항공우주산업의 연구성과를 전시해 우주여행에 대한 간접 체험을 제공하고 미디어아트와 다누리 촬영 작품을 통해 우주과학 기술에 대한 관람객의 상상력을 자극하기 위해 기획됐다.
㈜롯데월드 서울스카이의 초청을 받아 규모를 확장해 진행하는 이번 전시는 서울스카이 곳곳에 작품을 설치해 관람객을 맞이하는 것이 가장 큰 특징이다. 120층 메인홀에는 국내 최초로 지구와 달을 동시에 촬영한 작품과 다누리 모형을 배치해 작품을 통해 다누리가 바라본 우주의 모습을 입체적으로 감상할 수 있게 공간을 구성했다. 전시장 안쪽으로는 달 궤도 진입 후 조우한 달의 모습과 미국 아르테미스 유인 미션 착륙 후보지 등의 작품이 전시된다.
120층 전시장으로 향하는 지하 1층 매표소에는 발사체가 우주로 진입하는 영상을 배치해 우주여행을 떠나는 듯한 몰입감을 극대화했다. 지하 2층에는 모션그래픽을 활용한 영상작품을 감상할 수 있는 미디어월이 설치됐다. 다누리가 촬영한 지구와 달을 배치해 관람객에게 공전 및 자전을 관측하는 듯한 경험을 선사하고 통로 측에는 인공위성 관제실 그래픽과 다누리 발사 당시 음향을 활용해 다누리의 발사에 함께하는 듯한 현장감을 더했다.
이외에도 대한민국 우주과학 기술의 여정을 대중에게 소개하기 위해 KAIST 인공위성연구소가 개발한 우리나라 최초 인공위성 우리별 1호도 전시된다. 석현정 KAIST 미술관장은 "이번 전시는 과학기술의 결과물을 감상이 가능한 콘텐츠로 만들어내 관람객들이 예술적 감동을 느낄 수 있도록 공간을 구성했다"라고 전했다. 이어 석 관장은 "다누리의 달 궤도 임무운영 1주년을 기념하는 이 특별한 순간을 함께 나누는 전시 관람을 통해 대한민국 우주과학 기술의 성과를 체감하고 우주를 향한 우리의 도전에도 많은 관심과 응원 부탁드린다"라고 덧붙였다. 한편, '다누리의 스펙타클 365' 전시회는 KAIST 미술관이 한국항공우주연구원, 과학기술정보통신부와 함께 공동 주관·주최한다. KAIST 인공위성연구소, 한국연구재단이 참여하고 ㈜롯데월드 서울스카이가 후원하며, 오는 1월 31일(수)까지 ㈜롯데월드 서울스카이 입장객에게 무료로 공개된다.
KAIST미술관이 기획한 롯데월드 서울스카이 초청 전시, “다누리의 스펙타클 365”
우리 대학이 이달 20일부터 대한민국 최초의 달 탐사선인 다누리의 달 궤도 임무운영 1주년을 기념하기 위한 전시회를 ㈜롯데월드 서울스카이(SEOUL SKY)에서 개최한다. '다누리의 스펙타클 365'는 KAIST 미술관이 지난 6월부터 8월까지 본교 창의학습관에서 진행했던 '다누리의 스펙타클' 전시의 연장선이다. 대한민국 항공우주산업의 연구성과를 전시해 우주여행에 대한 간접 체험을 제공하고 미디어아트와 다누리 촬영 작품을 통해 우주과학 기술에 대한 관람객의 상상력을 자극하기 위해 기획됐다.
㈜롯데월드 서울스카이의 초청을 받아 규모를 확장해 진행하는 이번 전시는 서울스카이 곳곳에 작품을 설치해 관람객을 맞이하는 것이 가장 큰 특징이다. 120층 메인홀에는 국내 최초로 지구와 달을 동시에 촬영한 작품과 다누리 모형을 배치해 작품을 통해 다누리가 바라본 우주의 모습을 입체적으로 감상할 수 있게 공간을 구성했다. 전시장 안쪽으로는 달 궤도 진입 후 조우한 달의 모습과 미국 아르테미스 유인 미션 착륙 후보지 등의 작품이 전시된다.
120층 전시장으로 향하는 지하 1층 매표소에는 발사체가 우주로 진입하는 영상을 배치해 우주여행을 떠나는 듯한 몰입감을 극대화했다. 지하 2층에는 모션그래픽을 활용한 영상작품을 감상할 수 있는 미디어월이 설치됐다. 다누리가 촬영한 지구와 달을 배치해 관람객에게 공전 및 자전을 관측하는 듯한 경험을 선사하고 통로 측에는 인공위성 관제실 그래픽과 다누리 발사 당시 음향을 활용해 다누리의 발사에 함께하는 듯한 현장감을 더했다.
이외에도 대한민국 우주과학 기술의 여정을 대중에게 소개하기 위해 KAIST 인공위성연구소가 개발한 우리나라 최초 인공위성 우리별 1호도 전시된다. 석현정 KAIST 미술관장은 "이번 전시는 과학기술의 결과물을 감상이 가능한 콘텐츠로 만들어내 관람객들이 예술적 감동을 느낄 수 있도록 공간을 구성했다"라고 전했다. 이어 석 관장은 "다누리의 달 궤도 임무운영 1주년을 기념하는 이 특별한 순간을 함께 나누는 전시 관람을 통해 대한민국 우주과학 기술의 성과를 체감하고 우주를 향한 우리의 도전에도 많은 관심과 응원 부탁드린다"라고 덧붙였다. 한편, '다누리의 스펙타클 365' 전시회는 KAIST 미술관이 한국항공우주연구원, 과학기술정보통신부와 함께 공동 주관·주최한다. KAIST 인공위성연구소, 한국연구재단이 참여하고 ㈜롯데월드 서울스카이가 후원하며, 오는 1월 31일(수)까지 ㈜롯데월드 서울스카이 입장객에게 무료로 공개된다.
2023.12.19
조회수 1777
-
 김성용 교수, 10년 주기 해양 원격 탐사 국제학회 기조연설 맡아
우리 대학 기계공학과 김성용 교수가 1980년부터 10년 주기로 열리는 해양과학 분야의 권위있는 원격탐사 국제학회 `우주에서 관측한 바다(OCEANS FROM SPACE)'에서 한반도 주변 고해상도 해양관측 연구에 대한 높은 평가를 받아 기조연설 연사로 초청받았다고 21일 밝혔다. 김 교수는 오는 10월 26일 이탈리아 베니스에서 기조연설을 할 예정이다.
1964년 미국 우즈홀에서 `우주에서 관측한 해양학(Oceanography from Space)'라는 이름으로 처음 열린 본 학회는 1980년부터 매년 10년 주기로 이탈리아 베니스에서 `우주에서 관측한 바다(OCEANS FROM SPACE)'로 열리고 있으며 지난 10년간 해양 원격 탐사 연구 중 주요한 과학 및 기술 분야의 성취, 혁신 및 도전에 관한 내용을 주제로 해양 원격 탐사 커뮤니티의 리더들을 초청하고 공유하는 주요한 학회로서 해양 탐사에 진전을 가져온 새로운 기술과 활동 및 서비스 등을 프로그램으로 구성하고 있다. 2020년 예정됐으나 코로나19로 인해 2번 연기됐으며 2022년 10월 24일부터 28일까지 이탈리아 베니스 산마르코 스쿠올라 그란데(Scuola Grande di San Marco)에서 열릴 예정이다.
김 교수가 발표할 내용은 한반도 주변 고주파 레이더로 관측된 고해상도 표층 해수 유동장과 정지궤도 위성으로 관측된 고해상도 엽록소 농도장의 동시 관측 자료를 해양 난류 관점에서 이론과 실측자료의 비교 분석을 실시해 해양 아중규모(100km 미만 공간규모 및 매시간 이하 시간규모)의 해양 에너지가 전달되고 주입되는 시공간 규모와 기작을 세계 최초로 규명한 것을 담고 있다. 또한, 해양 난류의 실측자료를 기반해 아중규모에서 해양 난류의 이론을 검증하고 보완한 내용도 발표할 예정이다. 본 학회에서 한국인 해양학자 중에는 처음으로 기조연설 연사로 초청받았다.
해당 연구는 2018년 해양학 분야 최상위 저널인 `저널 오브 지오피지컬 리서치-오션스(Journal of Geophysical Research-oceans)'에 출간됐고, 해당 논문은 2019년 해양수산부 해양수산과학기술대상 학술부문 우수상을 수상했다.
김 교수는 "고해상도 해양 난류의 시공간 원격 관측을 통해 해양 난류를 이해하고 기후변화에 영향을 줄 수 있는 대기-해양의 에너지 주입 및 전달에 관한 연구가 해양 원격 관측 커뮤니티에서 좋은 평가를 받아 감사하고 최근 연구비 지원을 통해 계속될 수 있어 감회가 새롭다ˮ고 소감을 전했다.
이번 연구는 한국연구재단 북서태평양 해양-육상-대기 탄소과제 및 해양수산과학기술진흥원의 AI기반 해양수색구조 의사결정 지원 시스템 개발과제를 통해 지속되고 있다.
논문 세부 정보: Lee, E. A. and S. Y. Kim, 2018: Regional variability and turbulent characteristics of the satellite-sensed submesoscale surface chlorophyll concentrations, J. Geophys. Res. Oceans 123(6), 4250 - 4279, doi:10.1002/2017JC013732
김성용 교수, 10년 주기 해양 원격 탐사 국제학회 기조연설 맡아
우리 대학 기계공학과 김성용 교수가 1980년부터 10년 주기로 열리는 해양과학 분야의 권위있는 원격탐사 국제학회 `우주에서 관측한 바다(OCEANS FROM SPACE)'에서 한반도 주변 고해상도 해양관측 연구에 대한 높은 평가를 받아 기조연설 연사로 초청받았다고 21일 밝혔다. 김 교수는 오는 10월 26일 이탈리아 베니스에서 기조연설을 할 예정이다.
1964년 미국 우즈홀에서 `우주에서 관측한 해양학(Oceanography from Space)'라는 이름으로 처음 열린 본 학회는 1980년부터 매년 10년 주기로 이탈리아 베니스에서 `우주에서 관측한 바다(OCEANS FROM SPACE)'로 열리고 있으며 지난 10년간 해양 원격 탐사 연구 중 주요한 과학 및 기술 분야의 성취, 혁신 및 도전에 관한 내용을 주제로 해양 원격 탐사 커뮤니티의 리더들을 초청하고 공유하는 주요한 학회로서 해양 탐사에 진전을 가져온 새로운 기술과 활동 및 서비스 등을 프로그램으로 구성하고 있다. 2020년 예정됐으나 코로나19로 인해 2번 연기됐으며 2022년 10월 24일부터 28일까지 이탈리아 베니스 산마르코 스쿠올라 그란데(Scuola Grande di San Marco)에서 열릴 예정이다.
김 교수가 발표할 내용은 한반도 주변 고주파 레이더로 관측된 고해상도 표층 해수 유동장과 정지궤도 위성으로 관측된 고해상도 엽록소 농도장의 동시 관측 자료를 해양 난류 관점에서 이론과 실측자료의 비교 분석을 실시해 해양 아중규모(100km 미만 공간규모 및 매시간 이하 시간규모)의 해양 에너지가 전달되고 주입되는 시공간 규모와 기작을 세계 최초로 규명한 것을 담고 있다. 또한, 해양 난류의 실측자료를 기반해 아중규모에서 해양 난류의 이론을 검증하고 보완한 내용도 발표할 예정이다. 본 학회에서 한국인 해양학자 중에는 처음으로 기조연설 연사로 초청받았다.
해당 연구는 2018년 해양학 분야 최상위 저널인 `저널 오브 지오피지컬 리서치-오션스(Journal of Geophysical Research-oceans)'에 출간됐고, 해당 논문은 2019년 해양수산부 해양수산과학기술대상 학술부문 우수상을 수상했다.
김 교수는 "고해상도 해양 난류의 시공간 원격 관측을 통해 해양 난류를 이해하고 기후변화에 영향을 줄 수 있는 대기-해양의 에너지 주입 및 전달에 관한 연구가 해양 원격 관측 커뮤니티에서 좋은 평가를 받아 감사하고 최근 연구비 지원을 통해 계속될 수 있어 감회가 새롭다ˮ고 소감을 전했다.
이번 연구는 한국연구재단 북서태평양 해양-육상-대기 탄소과제 및 해양수산과학기술진흥원의 AI기반 해양수색구조 의사결정 지원 시스템 개발과제를 통해 지속되고 있다.
논문 세부 정보: Lee, E. A. and S. Y. Kim, 2018: Regional variability and turbulent characteristics of the satellite-sensed submesoscale surface chlorophyll concentrations, J. Geophys. Res. Oceans 123(6), 4250 - 4279, doi:10.1002/2017JC013732
2022.10.21
조회수 3644
-
 건설및환경공학과 유지환 교수팀, IEEE 로보틱스 자동화 저널 최우수 논문상 수상
우리 대학 건설 및 환경공학과 유지환 교수 연구팀이 로봇 분야 프리미어 저널인 IEEE 로보틱스 자동화 저널(Robotics and Automation Magazine)에서 “Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration” 이라는 논문으로 2020년 최우수 논문상(Best Paper Award)에 선정됐다.
시상은 5월 30일부터 개최된 로봇 분야 프리미어 학회인 2021 IEEE 로보틱스 자동화 국제 학회 (International Conference on Robotics and Automation, ICRA) 시상식(6월 2일)에서 온라인으로 수여됐다.
선정된 논문은 스탠포드 대학교와의 공동연구 결과로 발표된 논문으로, 나무줄기처럼 자라나는 소프트 그로잉 로봇의 설계, 원격조종, 그리고 재난 및 탐사 현장에서의 활용에 관한 논문으로, 동 저널에 2020년 게재된 논문 중 가장 큰 영향력과 많은 인용 수를 인정받아 최우수 논문으로 선정됐다.
건설및환경공학과 유지환 교수팀, IEEE 로보틱스 자동화 저널 최우수 논문상 수상
우리 대학 건설 및 환경공학과 유지환 교수 연구팀이 로봇 분야 프리미어 저널인 IEEE 로보틱스 자동화 저널(Robotics and Automation Magazine)에서 “Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration” 이라는 논문으로 2020년 최우수 논문상(Best Paper Award)에 선정됐다.
시상은 5월 30일부터 개최된 로봇 분야 프리미어 학회인 2021 IEEE 로보틱스 자동화 국제 학회 (International Conference on Robotics and Automation, ICRA) 시상식(6월 2일)에서 온라인으로 수여됐다.
선정된 논문은 스탠포드 대학교와의 공동연구 결과로 발표된 논문으로, 나무줄기처럼 자라나는 소프트 그로잉 로봇의 설계, 원격조종, 그리고 재난 및 탐사 현장에서의 활용에 관한 논문으로, 동 저널에 2020년 게재된 논문 중 가장 큰 영향력과 많은 인용 수를 인정받아 최우수 논문으로 선정됐다.
2021.06.04
조회수 57993
-
 KAIST-항우연-천문연, 심우주 탐사 위해 역량 모은다
우리 대학이 항공우주연구원(원장 이상률, 이하 항우연), 한국천문연구원(원장 박영득, 이하 천문연)과 함께은 18일 오후 3시 대전 본원 제2회의실에서 심우주탐사* 전문가 간담회를 개최했다. ☞ 심우주탐사 : 지구 중력이나 자기장의 영향이 미치지 않는 우주 공간 탐사
용홍택 과학기술정보통신부 제1차관이 참석한 이날 회의는 심우주탐사와 관련한 각 출연(연)의 현황 및 중장기적 계획을 공유함과 동시에 기관간 적극적인 협력을 위해 마련되었다.미국 NASA는 국제협력을 통해 유인 달착륙에 도전하는 ‘아르테미스 계획’을 추진 중이며, 민간기업 SpaceX는 화성탐사에 도전하고 있다. 또한 중국의 톈원1호가 최근 화성에 착륙에 성공하는 등 전 세계적으로 우주탐사에 대한 관심이 증가하고 있다. 심우주탐사 분야는 미래 우주 기술 확보, 우주자원 활용 등과도 연계되어 있어 독자 발사체, 위성 기술 확보 이후 우리나라도 지속 도전해야 할 분야이다.
우리 대학을 포함한 3개 기관은 우리나라가 지난 30여년간 우주개발 역량을 쌓아오는 동안 발사체·인공위성·탑재체·과학연구 등의 분야에서 상호 보완적인 역할을 수행해 왔으며, 심우주탐사 시대에는 기관 간 협력이 더욱 필요하다는 공감대를 통해 지난해 12월 ʻ심우주탐사 분야의 연구개발 및 사업화를 위한 협력 양해각서(MOU)ʼ를 체결했다.
향후, 연구개발 계획을 수립할 실무급 ‘심우주탐사 연구연합회’를 발족해 우주 과학연구와 탐사 기술 개발을 위한 연구계획을 공유·협의하여 국가의 심우주탐사 계획 수립에 기여할 계획이다.
18일 열린 회의에서는 각 기관의 심우주탐사 전문가가 발제를 맡아 작년 양해각서 체결 이후 실무협의 진행 상황을 공유했으며, 이후 기관별 우주탐사 추진 현황과 향후 계획을 발표하고 의견을 나눴다.항우연은 2030년까지 한국형발사체를 이용한 달착륙선 발사 계획과 관련 달착륙 기술연구 등 우주탐사와 관련된 기술 현황을 설명했고 천문연은 지난 20여년 동안 축적한 탑재체 기술을 바탕으로 우주의 생성, 인류의 근원 등 심우주탐사 연구의 필요성과 NASA 등과의 국제협력을 통한 대형 우주탐사 임무에 참여하는 계획을 소개했다. 우리 대학은 우리나라 최초의 인공위성인 우리별 1호 위성을 우리 기술로 다시 지구로 귀환시키는 계획과 지구 주변 방사선대(반앨런대) 탐사 계획을 공유했다.용홍택 과기정통부 제1차관은 “올해 10월 누리호 발사 이후 우리나라 우주개발 역량을 더욱 높이기 위해 우주탐사 계획을 포함한 우주개발 고도화의 준비와 노력을 지속해야 한다”라고 강조하고 “오늘 이 자리에서 논의한 다양하고 전문적인 의견은 올해 하반기에 수립 예정인 ‘국가 우주탐사 로드맵’과 연계하여 정부정책으로 검토할 계획이다”라고 밝혔다.
KAIST-항우연-천문연, 심우주 탐사 위해 역량 모은다
우리 대학이 항공우주연구원(원장 이상률, 이하 항우연), 한국천문연구원(원장 박영득, 이하 천문연)과 함께은 18일 오후 3시 대전 본원 제2회의실에서 심우주탐사* 전문가 간담회를 개최했다. ☞ 심우주탐사 : 지구 중력이나 자기장의 영향이 미치지 않는 우주 공간 탐사
용홍택 과학기술정보통신부 제1차관이 참석한 이날 회의는 심우주탐사와 관련한 각 출연(연)의 현황 및 중장기적 계획을 공유함과 동시에 기관간 적극적인 협력을 위해 마련되었다.미국 NASA는 국제협력을 통해 유인 달착륙에 도전하는 ‘아르테미스 계획’을 추진 중이며, 민간기업 SpaceX는 화성탐사에 도전하고 있다. 또한 중국의 톈원1호가 최근 화성에 착륙에 성공하는 등 전 세계적으로 우주탐사에 대한 관심이 증가하고 있다. 심우주탐사 분야는 미래 우주 기술 확보, 우주자원 활용 등과도 연계되어 있어 독자 발사체, 위성 기술 확보 이후 우리나라도 지속 도전해야 할 분야이다.
우리 대학을 포함한 3개 기관은 우리나라가 지난 30여년간 우주개발 역량을 쌓아오는 동안 발사체·인공위성·탑재체·과학연구 등의 분야에서 상호 보완적인 역할을 수행해 왔으며, 심우주탐사 시대에는 기관 간 협력이 더욱 필요하다는 공감대를 통해 지난해 12월 ʻ심우주탐사 분야의 연구개발 및 사업화를 위한 협력 양해각서(MOU)ʼ를 체결했다.
향후, 연구개발 계획을 수립할 실무급 ‘심우주탐사 연구연합회’를 발족해 우주 과학연구와 탐사 기술 개발을 위한 연구계획을 공유·협의하여 국가의 심우주탐사 계획 수립에 기여할 계획이다.
18일 열린 회의에서는 각 기관의 심우주탐사 전문가가 발제를 맡아 작년 양해각서 체결 이후 실무협의 진행 상황을 공유했으며, 이후 기관별 우주탐사 추진 현황과 향후 계획을 발표하고 의견을 나눴다.항우연은 2030년까지 한국형발사체를 이용한 달착륙선 발사 계획과 관련 달착륙 기술연구 등 우주탐사와 관련된 기술 현황을 설명했고 천문연은 지난 20여년 동안 축적한 탑재체 기술을 바탕으로 우주의 생성, 인류의 근원 등 심우주탐사 연구의 필요성과 NASA 등과의 국제협력을 통한 대형 우주탐사 임무에 참여하는 계획을 소개했다. 우리 대학은 우리나라 최초의 인공위성인 우리별 1호 위성을 우리 기술로 다시 지구로 귀환시키는 계획과 지구 주변 방사선대(반앨런대) 탐사 계획을 공유했다.용홍택 과기정통부 제1차관은 “올해 10월 누리호 발사 이후 우리나라 우주개발 역량을 더욱 높이기 위해 우주탐사 계획을 포함한 우주개발 고도화의 준비와 노력을 지속해야 한다”라고 강조하고 “오늘 이 자리에서 논의한 다양하고 전문적인 의견은 올해 하반기에 수립 예정인 ‘국가 우주탐사 로드맵’과 연계하여 정부정책으로 검토할 계획이다”라고 밝혔다.
2021.05.20
조회수 14829
-
 지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
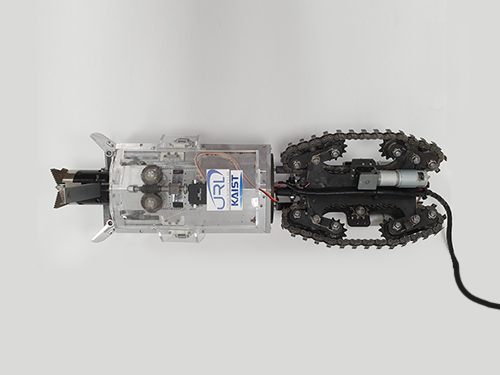
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
2020.06.05
조회수 12117
-
 제15회 KAIST 조정훈 학술상에 카탈루냐공대 박혁 교수
〈 조정훈 학술상 수상자 〉
‘제15회 KAIST 조정훈 학술상 수상자로 카탈루냐 공과대학(UPC-Barcelona Tech) 박혁 교수가 선정됐다.
우리 대학은 박혁 교수 외에 항공우주공학과 정상우 박사과정, 고려대 기계공학과 강은희 석박사통합과정, 공주사대부고 송찬호 학생 3명을 장학생으로 선발하고 이들에게 13일 오전 본관 1층 대회의실에서 장학금을 전달했다.
박혁 교수는 인공위성 원격탐사 및 큐브위성 개발 분야에서 총 50여 편의 SCI급 논문을 등재했으며, 110여 편 가량의 학술대회 논문, 15개의 유럽연합, 유럽우주국, 스페인 과기부 주관의 연구 개발 프로젝트들에 참여하는 등 훌륭한 연구 성과를 낸 공을 인정받았다.
박혁 교수는 지난 2012년 스페인 정부의 신진 박사 연구지원 프로그램인 후안 델 라시에르바(Juan de la Cierva) 펠로우에 선정됐으며, 2017년에는 스페인 정부 지원 연구소 및 대학교 영년직 선정 프로그램인 라몬 이 카할(Ramon y Cajal) 펠로우에 선정된 바 있다.
KAIST 조정훈 학술상은 2003년 5월 로켓실험실에서 연구를 수행하던 중 불의의 사고로 숨진 故 조정훈 명예박사를 기리기 위해 제정됐다.
이 상은 故 조 박사의 부친인 조동길 교수가 유족보상금과 사재를 합쳐 학술기금으로 기부한 4억 7천 800만 원을 재원으로 만들어졌으며, 2005년부터 매년 항공우주공학 분야에서 뛰어난 연구업적을 이룬 젊은 과학자를 발굴해 시상하고 있다.
우리 대학은 또 이 기금으로 조 박사가 재학했던 KAIST와 고려대, 공주사대부고에서 매년 각 1명씩 장학생을 선발해 장학금을 수여하고 있다. 학술상 수상자에게는 2천 500만 원의 상금, 대학(원)생은 400만 원, 고등학생은 300만 원의 장학금이 지급된다.
제15회 KAIST 조정훈 학술상에 카탈루냐공대 박혁 교수
〈 조정훈 학술상 수상자 〉
‘제15회 KAIST 조정훈 학술상 수상자로 카탈루냐 공과대학(UPC-Barcelona Tech) 박혁 교수가 선정됐다.
우리 대학은 박혁 교수 외에 항공우주공학과 정상우 박사과정, 고려대 기계공학과 강은희 석박사통합과정, 공주사대부고 송찬호 학생 3명을 장학생으로 선발하고 이들에게 13일 오전 본관 1층 대회의실에서 장학금을 전달했다.
박혁 교수는 인공위성 원격탐사 및 큐브위성 개발 분야에서 총 50여 편의 SCI급 논문을 등재했으며, 110여 편 가량의 학술대회 논문, 15개의 유럽연합, 유럽우주국, 스페인 과기부 주관의 연구 개발 프로젝트들에 참여하는 등 훌륭한 연구 성과를 낸 공을 인정받았다.
박혁 교수는 지난 2012년 스페인 정부의 신진 박사 연구지원 프로그램인 후안 델 라시에르바(Juan de la Cierva) 펠로우에 선정됐으며, 2017년에는 스페인 정부 지원 연구소 및 대학교 영년직 선정 프로그램인 라몬 이 카할(Ramon y Cajal) 펠로우에 선정된 바 있다.
KAIST 조정훈 학술상은 2003년 5월 로켓실험실에서 연구를 수행하던 중 불의의 사고로 숨진 故 조정훈 명예박사를 기리기 위해 제정됐다.
이 상은 故 조 박사의 부친인 조동길 교수가 유족보상금과 사재를 합쳐 학술기금으로 기부한 4억 7천 800만 원을 재원으로 만들어졌으며, 2005년부터 매년 항공우주공학 분야에서 뛰어난 연구업적을 이룬 젊은 과학자를 발굴해 시상하고 있다.
우리 대학은 또 이 기금으로 조 박사가 재학했던 KAIST와 고려대, 공주사대부고에서 매년 각 1명씩 장학생을 선발해 장학금을 수여하고 있다. 학술상 수상자에게는 2천 500만 원의 상금, 대학(원)생은 400만 원, 고등학생은 300만 원의 장학금이 지급된다.
2019.05.13
조회수 8923
-
 제1회 우주상황인식 국제워크숍 개최
우리 대학 항공우주공학과는 12월 6(목)~7일(금) 학술문화관 양승택 오디토리움에서 ‘제1회 우주상황인식 국제워크숍’을 개최한다.
우주상황인식 기술은 지구 주위 우주공간을 선회하는 인공위성, 우주쓰레기 등 여러 물체의 상황을 파악해 지상 충돌 및 추락 위험에 대처하는 기술이다. 최근 국가 간 우주개발 경쟁이 심화되며 우주환경이 혼잡해지고 있어 이에 대한 중요성이 급격하게 증가하고 있다.
‘우주물체감시’, ‘재진입’, ‘우주환경’ 이라는 3가지 대주제로 열리는 이번 워크숍에는 국외 학자 12인, 국내 학자 3인 등 우주상황인식 기술 분야의 세계적 석학들이 대거 참석한다. 이들의 연구 내용 발표를 중심으로 최신 기술 동향 및 현황을 공유하는 기술 교류의 장이 마련된다.
또한, 이번 행사를 통해 산학연 기술 교류 네트워크를 형성하고 관련 분야의 연구 인력 확산 및 학문적인 연구 분위기 조성에 기여할 수 있을 것으로 기대하고 있다.
공동 조직위원장인 박기수 · 안재명 KAIST 항공우주공학과 교수는 “산업체와 연구기관의 연구원들, 그리고 관련 전공 학생들이 우주상황인식 기술 및 활용에 관한 폭넓은 지식을 얻고 글로벌 네트워크를 구축할 수 있는 좋은 기회가 될 것”이라고 말했다.
본 워크숍은 2018년도 KAIST 공과대학 국제화 혁신사업의 일환으로 진행되며 KAIST 우주탐사공학 학제전공, 한국천문연구원, 우주환경감시기관, 쎄트렉아이, KAIST 인공위성연구소, 대전마케팅공사의 후원을 받아 진행된다.
관련 문의: 항공우주공학과 박기수 교수 (042-350-3726, gisu82@kaist.ac.kr )
제1회 우주상황인식 국제워크숍 개최
우리 대학 항공우주공학과는 12월 6(목)~7일(금) 학술문화관 양승택 오디토리움에서 ‘제1회 우주상황인식 국제워크숍’을 개최한다.
우주상황인식 기술은 지구 주위 우주공간을 선회하는 인공위성, 우주쓰레기 등 여러 물체의 상황을 파악해 지상 충돌 및 추락 위험에 대처하는 기술이다. 최근 국가 간 우주개발 경쟁이 심화되며 우주환경이 혼잡해지고 있어 이에 대한 중요성이 급격하게 증가하고 있다.
‘우주물체감시’, ‘재진입’, ‘우주환경’ 이라는 3가지 대주제로 열리는 이번 워크숍에는 국외 학자 12인, 국내 학자 3인 등 우주상황인식 기술 분야의 세계적 석학들이 대거 참석한다. 이들의 연구 내용 발표를 중심으로 최신 기술 동향 및 현황을 공유하는 기술 교류의 장이 마련된다.
또한, 이번 행사를 통해 산학연 기술 교류 네트워크를 형성하고 관련 분야의 연구 인력 확산 및 학문적인 연구 분위기 조성에 기여할 수 있을 것으로 기대하고 있다.
공동 조직위원장인 박기수 · 안재명 KAIST 항공우주공학과 교수는 “산업체와 연구기관의 연구원들, 그리고 관련 전공 학생들이 우주상황인식 기술 및 활용에 관한 폭넓은 지식을 얻고 글로벌 네트워크를 구축할 수 있는 좋은 기회가 될 것”이라고 말했다.
본 워크숍은 2018년도 KAIST 공과대학 국제화 혁신사업의 일환으로 진행되며 KAIST 우주탐사공학 학제전공, 한국천문연구원, 우주환경감시기관, 쎄트렉아이, KAIST 인공위성연구소, 대전마케팅공사의 후원을 받아 진행된다.
관련 문의: 항공우주공학과 박기수 교수 (042-350-3726, gisu82@kaist.ac.kr )
2018.12.04
조회수 6598
-
 항공우주공학과, NASA임무설계대회 최우수상 수상
〈 KAIST 팀 학생들, 왼쪽부터 이주성, 고재열, 최석민, 서종은, 이은광 〉
〈 안재명 지도교수 〉
우리 대학 항공우주공학과 학생 팀이 美 항공우주국(NASA)이 주관하는 항공우주 임무 설계 경연대회인 라스칼(RASCAL : Revolutionary Aerospace Systems Concepts Academic Linkage) 대회에서 달 탐사 시스템 설계 분야 최우수상(Best in Theme Award)을 수상했다.
항공우주공학과 안재명 교수의 지도하에 고재열, 서종은, 이주성, 최석민, 이은광 학생으로 구성된 KAIST 팀은 미국 학교가 반드시 포함돼야 하는 대회 규정에 따라 텍사스 공대(Texas Tech University), 왕립 멜버른 공대(Royal Melbourne Institute of Technology)와 함께 연합 팀으로 출전했다.
연합 팀은 두 차례의 예선을 거쳐 최종 14팀에 선정돼 5월 30일부터 6월 3일까지 플로리다에서 열린 본선에서 발표회를 가졌다. 총 4개 분야 중 ‘장기간 유인 달 탐사를 위한 물자 전송 시스템 설계’ 에 참여한 연합 팀은 해당 부문 1등상을 수상했다.
NASA 주관 하에 2002년부터 개최된 라스칼은 혁신적인 항공우주 시스템 및 임무를 주제로 학생들의 설계 역량을 겨루는 대회로 세계 최고 수준 학교 및 학생들이 참가하고 있다.
올해 대회 분야는 ▲우주인을 위한 경량 체력단련 모듈 설계(Lightweight Exercise Suite) ▲우주인의 선외 활동을 위한 에어록 모듈 설계(Airlock Design) ▲지구저궤도 및 화성에서 사용 가능한 상용 우주인 거주 모듈 설계(Commercially Enabled LEO/Mars Habitable Module) ▲장기간 유인 달 탐사를 위한 물자 전송 시스템 설계(Logistics Delivery System)로 구분된다.
달 탐사를 위해서는 많은 시간과 물자가 필요하다. KAIST 팀은 장기 유인 달 탐사를 위한 우주 물자이동시스템 설계를 위해 작년부터 약 8개월 간 연합 팀과의 회의를 통해 연구를 해왔다.
특히 장기 유인 달 탐사 임무에는 초기 계획 수립 시 예측할 수 없는 돌발 상황이 발생할 수 있다. KAIST 팀은 이와 같은 임무 불확실성에 대응하기 위해 유연성을 극대화하는 시스템과 운용 개념을 도출, 물자 수송에 소요되는 비용 효용성을 극대화했다.
구체적으로 우주선을 기능에 따라 추진 모듈과 배송 모듈로 나누어 설계했고 달 기지의 수요에 맞춰 배송 모듈을 교환할 수 있게 했다. 또한 다양한 출발 지점을 활용했다
항공우주공학과는 시스템 중심적 사고를 기반으로 한 항공 우주 연구에 초점을 맞춰왔고, 이를 통해 첫 참가임에도 NASA 주관 대회에서 우수한 성적을 거둘 수 있었다.
지도를 맡은 안재명 교수는 “멀리 떨어진 국제연합팀을 리드하며 훌륭한 결과를 만든 학생들이 자랑스럽다”며 “학과가 지속적으로 노력한 시스템-설계 중심 교육의 결실이라고 생각하고 향후 설계교육 분야의 국제협력을 통해 양질의 교육과 다양한 기회를 제공하겠다.”고 말했다.
항공우주공학과, NASA임무설계대회 최우수상 수상
〈 KAIST 팀 학생들, 왼쪽부터 이주성, 고재열, 최석민, 서종은, 이은광 〉
〈 안재명 지도교수 〉
우리 대학 항공우주공학과 학생 팀이 美 항공우주국(NASA)이 주관하는 항공우주 임무 설계 경연대회인 라스칼(RASCAL : Revolutionary Aerospace Systems Concepts Academic Linkage) 대회에서 달 탐사 시스템 설계 분야 최우수상(Best in Theme Award)을 수상했다.
항공우주공학과 안재명 교수의 지도하에 고재열, 서종은, 이주성, 최석민, 이은광 학생으로 구성된 KAIST 팀은 미국 학교가 반드시 포함돼야 하는 대회 규정에 따라 텍사스 공대(Texas Tech University), 왕립 멜버른 공대(Royal Melbourne Institute of Technology)와 함께 연합 팀으로 출전했다.
연합 팀은 두 차례의 예선을 거쳐 최종 14팀에 선정돼 5월 30일부터 6월 3일까지 플로리다에서 열린 본선에서 발표회를 가졌다. 총 4개 분야 중 ‘장기간 유인 달 탐사를 위한 물자 전송 시스템 설계’ 에 참여한 연합 팀은 해당 부문 1등상을 수상했다.
NASA 주관 하에 2002년부터 개최된 라스칼은 혁신적인 항공우주 시스템 및 임무를 주제로 학생들의 설계 역량을 겨루는 대회로 세계 최고 수준 학교 및 학생들이 참가하고 있다.
올해 대회 분야는 ▲우주인을 위한 경량 체력단련 모듈 설계(Lightweight Exercise Suite) ▲우주인의 선외 활동을 위한 에어록 모듈 설계(Airlock Design) ▲지구저궤도 및 화성에서 사용 가능한 상용 우주인 거주 모듈 설계(Commercially Enabled LEO/Mars Habitable Module) ▲장기간 유인 달 탐사를 위한 물자 전송 시스템 설계(Logistics Delivery System)로 구분된다.
달 탐사를 위해서는 많은 시간과 물자가 필요하다. KAIST 팀은 장기 유인 달 탐사를 위한 우주 물자이동시스템 설계를 위해 작년부터 약 8개월 간 연합 팀과의 회의를 통해 연구를 해왔다.
특히 장기 유인 달 탐사 임무에는 초기 계획 수립 시 예측할 수 없는 돌발 상황이 발생할 수 있다. KAIST 팀은 이와 같은 임무 불확실성에 대응하기 위해 유연성을 극대화하는 시스템과 운용 개념을 도출, 물자 수송에 소요되는 비용 효용성을 극대화했다.
구체적으로 우주선을 기능에 따라 추진 모듈과 배송 모듈로 나누어 설계했고 달 기지의 수요에 맞춰 배송 모듈을 교환할 수 있게 했다. 또한 다양한 출발 지점을 활용했다
항공우주공학과는 시스템 중심적 사고를 기반으로 한 항공 우주 연구에 초점을 맞춰왔고, 이를 통해 첫 참가임에도 NASA 주관 대회에서 우수한 성적을 거둘 수 있었다.
지도를 맡은 안재명 교수는 “멀리 떨어진 국제연합팀을 리드하며 훌륭한 결과를 만든 학생들이 자랑스럽다”며 “학과가 지속적으로 노력한 시스템-설계 중심 교육의 결실이라고 생각하고 향후 설계교육 분야의 국제협력을 통해 양질의 교육과 다양한 기회를 제공하겠다.”고 말했다.
2017.06.20
조회수 15984
-
 항공 권세진교수팀 달탐사선, 과학카페에서 소개
항공우주공학과 권세진 교수연구실에서 연구개발중인 달탐사선이 KBS-1TV의 인기있는 과학교양프로그램인 ‘과학카페’를 통해 소개된다.
(방영일 2009/11/28 토요일 저녁7시10분 KBS-1TV, 제목 "달로의 귀환")
2009년 세계 천문의 해를 맞이하여 과학카페 제145회분으로 방송되는 ‘달로의 귀환’이란 제목의 방영에서는 인류가 달에 착륙했던 1969년 7월 20일의 아폴로 우주선에 대한 소개를 시작으로 아시아의 달탐사 경쟁에 대한 소개로 일본의 달탐사 위성 카구야와 인도의 찬드라얀 등을 소개한다.
특히 21세기에 들어 세계 각국의 탐사선이 경쟁하듯 달로 향하고 있는 가운데 대한민국의 대표적인 달탐사 관련 연구개발 현장으로 달착륙선을 연구중인 우리대학 항공우주공학과의 권세진 교수연구팀을 자세히 방영할 예정이다. 권세진 교수 연구팀은 7년의 연구 개발을 통해 추력 250N 급의 달 착륙선 엔진을 개발한 바 있다.
KBS-1TV 과학카페 홈페이지 연결하기 http://www.kbs.co.kr/1tv/sisa/science/program/index.html
항공 권세진교수팀 달탐사선, 과학카페에서 소개
항공우주공학과 권세진 교수연구실에서 연구개발중인 달탐사선이 KBS-1TV의 인기있는 과학교양프로그램인 ‘과학카페’를 통해 소개된다.
(방영일 2009/11/28 토요일 저녁7시10분 KBS-1TV, 제목 "달로의 귀환")
2009년 세계 천문의 해를 맞이하여 과학카페 제145회분으로 방송되는 ‘달로의 귀환’이란 제목의 방영에서는 인류가 달에 착륙했던 1969년 7월 20일의 아폴로 우주선에 대한 소개를 시작으로 아시아의 달탐사 경쟁에 대한 소개로 일본의 달탐사 위성 카구야와 인도의 찬드라얀 등을 소개한다.
특히 21세기에 들어 세계 각국의 탐사선이 경쟁하듯 달로 향하고 있는 가운데 대한민국의 대표적인 달탐사 관련 연구개발 현장으로 달착륙선을 연구중인 우리대학 항공우주공학과의 권세진 교수연구팀을 자세히 방영할 예정이다. 권세진 교수 연구팀은 7년의 연구 개발을 통해 추력 250N 급의 달 착륙선 엔진을 개발한 바 있다.
KBS-1TV 과학카페 홈페이지 연결하기 http://www.kbs.co.kr/1tv/sisa/science/program/index.html
2009.11.26
조회수 13648
-
 한국최초 우주인 이소연 박사 KAIST에서 첫 강의
- 4일(목), KAIST 교내 기계항공시스템학부에서, 한국 우주인 프로그램에 대해 학부생과 일부 대학원생을 대상으로 강의
한국 최초의 우주인인 이소연(30) 박사가 모교인 KAIST에서 겸직교수로 발령받은(2008.9.1일부) 지 처음으로 자신의 우주인 선발과정과 우주실험 등에 대해 후배들에게 강의를 하게 된다.
오는 4일(목) 오후 4시부터 6시까지 KAIST 기계항공시스템학부(N7 건물) 강의실에서 항공우주공학 전공 학부생들과 일부 대학원생을 대상으로 강의를 하게 되는 데, 이 강의는 일반인들의 청강도 가능하다고 학교 측은 밝혔다.
이번 강의는 ‘항공우주공학 신기술 특강’ 과목의 일부로 이뤄진다. 이 강의에는 NASA에서 오랫동안 일하다 귀국한 KAIST 항공우주공학과 박철 교수가 지난 주에 달탐사에 대해 강의한 것을 비롯하여 항공우주분야의 국내 최고 전문가들이 강사로 나서고 있다.
한국최초 우주인 이소연 박사 KAIST에서 첫 강의
- 4일(목), KAIST 교내 기계항공시스템학부에서, 한국 우주인 프로그램에 대해 학부생과 일부 대학원생을 대상으로 강의
한국 최초의 우주인인 이소연(30) 박사가 모교인 KAIST에서 겸직교수로 발령받은(2008.9.1일부) 지 처음으로 자신의 우주인 선발과정과 우주실험 등에 대해 후배들에게 강의를 하게 된다.
오는 4일(목) 오후 4시부터 6시까지 KAIST 기계항공시스템학부(N7 건물) 강의실에서 항공우주공학 전공 학부생들과 일부 대학원생을 대상으로 강의를 하게 되는 데, 이 강의는 일반인들의 청강도 가능하다고 학교 측은 밝혔다.
이번 강의는 ‘항공우주공학 신기술 특강’ 과목의 일부로 이뤄진다. 이 강의에는 NASA에서 오랫동안 일하다 귀국한 KAIST 항공우주공학과 박철 교수가 지난 주에 달탐사에 대해 강의한 것을 비롯하여 항공우주분야의 국내 최고 전문가들이 강사로 나서고 있다.
2008.12.04
조회수 14393
-
 항공우주공학과 권세진 교수, 달착륙선 개발 및 시험성공
- 우주 선진국의 기술이전 기피 핵심기술 자체개발 성공
- NASA 국제 달탐사 네트워크용 달착륙선의 절반비용으로 개발가능
항공우주공학과 로켓 연구실의 권세진(權世震, 49) 교수 연구팀이 (주)스페이스솔루션(대표 이재헌)과 공동으로 달착륙선을 개발하고 시험에 성공했다.
이번에 개발된 달착륙선은 무게가 25kg이고, 엔진은 최대 350N(Newton) 까지 출력을 제어할 수 있어 중력이 지구의 1/6에 불과한 달 표면에 약 20kg 이상의 무게를 착륙시킬 수 있다. 달착륙선은 달 탐사를 위해 필수적인 장치이지만, 로켓기술과 함께 우주 선진국이 원천적으로 기술이전을 기피하고 있는 우주핵심 기술이다. 權 교수의 로켓 연구실에서는 6년여의 연구 끝에 추력조절이 가능한 우주선 엔진 개발에 성공하였으며, 이를 달착륙선에 장착한 시험에 성공하였다. 달착륙선의 성공적인 개발로 현재 논의 중인 우리나라의 달 탐사를 획기적으로 앞당길 수 있을 것으로 기대된다.
權 교수가 개발한 달착륙선에는 최대 350N의 추력을 낼 수 있는 액체추진제 로켓 엔진이 장착되어 있다. 이 엔진은 (주)스페이스솔루션에서 개발한 고성능 추진제 밸브가 장착되어 추력제어가 가능하다. 엔진의 추진제로 친환경 액체 추진제를 사용하였으며, 추진제에 독성이 없어 선진국의 달착륙선에 비해 개발 비용이 절반 수준으로 저렴하다.
權 교수에 의하면, NASA (미 항공우주국)에서 국제 달탐사 네트워크(ILN - International Lunar Network)용으로 개발 중인 달착륙선 한 기의 개발 비용이 1억 달러(1,500억원) 수준이지만, 이번에 개발된 엔진을 사용할 경우 그 절반 수준인 5,000만 달러(750억원)면 가능할 것으로 추정된다. 엔진 내부에 충진되는 촉매반응기를 포함한 모든 부품은 순수 국내기술로 제작됐다. 착륙선 경량화를 위해 추진제 탱크 및 가압용기를 복합재료로 제작하였고, 허니컴 샌드위치 판넬을 이용하는 등, 장치의 무게를 획기적으로 줄이면서도 강성을 높이는 최신 설계 기법을 사용했다.
한편, 단일추진제 로켓 엔진의 성공적인 개발과 더불어 權 교수의 로켓 연구실에서는 현재보다 효율이 2배 향상된 저장성 이원추진제 로켓엔진을 개발 중이다. 이 엔진은 1000N까지 추력을 제어할 수 있어서, 달 탐사를 위한 우주선의 엔진으로 사용할 수 있다.
항공우주공학과 권세진 교수, 달착륙선 개발 및 시험성공
- 우주 선진국의 기술이전 기피 핵심기술 자체개발 성공
- NASA 국제 달탐사 네트워크용 달착륙선의 절반비용으로 개발가능
항공우주공학과 로켓 연구실의 권세진(權世震, 49) 교수 연구팀이 (주)스페이스솔루션(대표 이재헌)과 공동으로 달착륙선을 개발하고 시험에 성공했다.
이번에 개발된 달착륙선은 무게가 25kg이고, 엔진은 최대 350N(Newton) 까지 출력을 제어할 수 있어 중력이 지구의 1/6에 불과한 달 표면에 약 20kg 이상의 무게를 착륙시킬 수 있다. 달착륙선은 달 탐사를 위해 필수적인 장치이지만, 로켓기술과 함께 우주 선진국이 원천적으로 기술이전을 기피하고 있는 우주핵심 기술이다. 權 교수의 로켓 연구실에서는 6년여의 연구 끝에 추력조절이 가능한 우주선 엔진 개발에 성공하였으며, 이를 달착륙선에 장착한 시험에 성공하였다. 달착륙선의 성공적인 개발로 현재 논의 중인 우리나라의 달 탐사를 획기적으로 앞당길 수 있을 것으로 기대된다.
權 교수가 개발한 달착륙선에는 최대 350N의 추력을 낼 수 있는 액체추진제 로켓 엔진이 장착되어 있다. 이 엔진은 (주)스페이스솔루션에서 개발한 고성능 추진제 밸브가 장착되어 추력제어가 가능하다. 엔진의 추진제로 친환경 액체 추진제를 사용하였으며, 추진제에 독성이 없어 선진국의 달착륙선에 비해 개발 비용이 절반 수준으로 저렴하다.
權 교수에 의하면, NASA (미 항공우주국)에서 국제 달탐사 네트워크(ILN - International Lunar Network)용으로 개발 중인 달착륙선 한 기의 개발 비용이 1억 달러(1,500억원) 수준이지만, 이번에 개발된 엔진을 사용할 경우 그 절반 수준인 5,000만 달러(750억원)면 가능할 것으로 추정된다. 엔진 내부에 충진되는 촉매반응기를 포함한 모든 부품은 순수 국내기술로 제작됐다. 착륙선 경량화를 위해 추진제 탱크 및 가압용기를 복합재료로 제작하였고, 허니컴 샌드위치 판넬을 이용하는 등, 장치의 무게를 획기적으로 줄이면서도 강성을 높이는 최신 설계 기법을 사용했다.
한편, 단일추진제 로켓 엔진의 성공적인 개발과 더불어 權 교수의 로켓 연구실에서는 현재보다 효율이 2배 향상된 저장성 이원추진제 로켓엔진을 개발 중이다. 이 엔진은 1000N까지 추력을 제어할 수 있어서, 달 탐사를 위한 우주선의 엔진으로 사용할 수 있다.
2008.11.28
조회수 13996
-
 항우(연)과 겸임교수제 및 공동연구 추진
- 16일, 양 기관 관계자들 참석 관련 MOU 체결- 미래 우주탐사분야 인력양성과 공동연구를 위한 인력교류
우리학교와 한국항공우주연구원(원장 백홍열)은 인공위성 등 항공우주기술 연구를 보다 효율적으로 수행하기 위해 공동연구 및 기술인력의 상호교류를 본격 추진키로 했다.
16일, 양 기관은 항우(연)에서 관련 MOU(양해각서)를 체결했으며, 미래 우주탐사를 선도할 인력양성을 위해 KAIST의 ‘우주탐사공학’ 학제전공 프로그램에 함께 참여하여 학연협력의 대표적인 모델로 발전시킬 것을 약속했다. 또한 이 프로그램의 활성화와 성과 창출을 위해 국제 공동 달탐사 프로그램인 ILN(International Lunar Network) 참여를 통한 공동연구 기회를 마련, 국가적으로 시급한 우주기술 개발을 위해 공동보조를 취하기로 했다.
이번 MOU 체결은 양 기관이 달 탐사 등 전문분야에서 공동연구를 추진함으로써 우리나라가 미래 국제사회의 우주선진국으로 도약하기 위한 계기를 마련케 됐다는 점과 학연협력을 통해 한국최초 우주인인 이소연 박사 등 항우(연)의 연구진을 KAIST의 겸임교수로 활용할 수 있게 됐다는데 의의가 있다.
항우(연)과 겸임교수제 및 공동연구 추진
- 16일, 양 기관 관계자들 참석 관련 MOU 체결- 미래 우주탐사분야 인력양성과 공동연구를 위한 인력교류
우리학교와 한국항공우주연구원(원장 백홍열)은 인공위성 등 항공우주기술 연구를 보다 효율적으로 수행하기 위해 공동연구 및 기술인력의 상호교류를 본격 추진키로 했다.
16일, 양 기관은 항우(연)에서 관련 MOU(양해각서)를 체결했으며, 미래 우주탐사를 선도할 인력양성을 위해 KAIST의 ‘우주탐사공학’ 학제전공 프로그램에 함께 참여하여 학연협력의 대표적인 모델로 발전시킬 것을 약속했다. 또한 이 프로그램의 활성화와 성과 창출을 위해 국제 공동 달탐사 프로그램인 ILN(International Lunar Network) 참여를 통한 공동연구 기회를 마련, 국가적으로 시급한 우주기술 개발을 위해 공동보조를 취하기로 했다.
이번 MOU 체결은 양 기관이 달 탐사 등 전문분야에서 공동연구를 추진함으로써 우리나라가 미래 국제사회의 우주선진국으로 도약하기 위한 계기를 마련케 됐다는 점과 학연협력을 통해 한국최초 우주인인 이소연 박사 등 항우(연)의 연구진을 KAIST의 겸임교수로 활용할 수 있게 됐다는데 의의가 있다.
2008.09.17
조회수 13733