-
 초소형·저전력·저잡음 브릴루앙 레이저 구현 성공
우리 대학 물리학과 이한석, 이용희 교수 공동연구팀(초세대협업연구실)이 경북대학교 최무한 교수, 호주국립대학교 최덕용 교수 연구팀과 공동연구를 통해 초소형·저전력·저잡음 *브릴루앙 레이저를 구현하는 데 성공했다고 23일 밝혔다. 주파수의 흔들림이 거의 없는 초소형·저전력·저잡음 광원은 차세대 초정밀 광센서 구성에 필요한 핵심 소자다.
☞ 브릴루앙 레이저(Brillouin laser): *브릴루앙 산란에 기반해 레이저 빛을 생성 증폭하며, 따라서 레이저의 매질이 브릴루앙 산란을 쉽게 일으킬수록 더 작은 에너지로도 작동할 수 있다. 출력 레이저 빛은 입력된 펌프 빛보다 주파수의 흔들림이 작고 매우 낮은 잡음을 갖는다.
☞ 브릴루앙 산란(Brillouin scattering): 빛이 매질과 상호작용을 통해 음파(acoustic phonon)를 생성하고 산란되는 현상. 산란된 빛은 음파의 에너지에 대응되는 주파수 감소를 겪으며, 유도 방출(stimulated emission) 즉 동일한 특성의 빛을 복제하는 것이 가능해 레이저 구성에 이용될 수 있다.
공동연구팀은 기존에 주로 사용돼온 물질보다 브릴루앙 산란 현상이 수백 배 잘 일어나는 칼코겐화합물 유리를 기반으로 브릴루앙 레이저를 개발함으로써 성능을 극대화했다. 칼코겐화합물 유리는 화학적 불안정성으로 인해 칩 상에서 식각을 통한 성형이 어렵다는 근본적인 약점이 있지만 연구팀은 증착 과정에서 자발적으로 광소자가 구성되는 새로운 제작 기법을 개발해 이런 문제를 해결했다.
연구팀이 개발한 제작 기법은 겨울철 지붕 위에 쌓인 눈의 형태가 지붕의 형태에 의해 정해지므로 눈을 직접 만지지 않고서도 지붕의 형태만을 조절해 원하는 눈의 형태를 얻는 것에 비유할 수 있다. 즉, 현재 반도체 공정 기술로 가공하기 쉬운 산화규소를 이용해 바닥구조를 적절히 형성하면, 그 위에 칼코겐화합물 유리를 증착하는 것만으로도 우수한 성능의 광소자가 자발적으로 형성되는 현상을 최초로 입증한 것이다.
공동연구팀은 자체 개발한 이 제작 기법을 활용해서 칼코겐화합물 유리 기반 고성능 브릴루앙 레이저를 반도체 칩 상에 초소형 광소자의 형태로 구현하는 데 성공했다. 또 기존 기록보다 100배 이상 낮은 펌프 에너지로도 레이저 구동이 가능함을 밝혔다.
공동연구팀 관계자는 "소형화 및 저전력 구동은 상용화를 위한 필수적인 요소ˮ라면서 "공동연구팀의 브릴루앙 레이저 광원 개발은 자율주행에 필요한 거리뿐만 아니라 회전관성 센서의 감도를 획기적으로 개선하는 등 차세대 광센서 개발에 널리 활용될 것으로 기대가 크다ˮ고 말했다.
그는 또 "연구 과정에서 개발한 신공정 기법은 지금껏 활용할 수 없었던 다양한 물질을 미세 광학소자 분야에 도입, 가능케 했다는 점에서 매우 의미가 클 뿐 아니라 향후 널리 활용될 가능성이 큰 원천기술이다ˮ라고 의미를 부여했다.
이번 연구를 주도한 교신저자 이한석 교수는 "칼코겐화합물 유리는 다양한 분자의 흡수선이 존재하는 중적외선 대역에도 적용 가능해 분자 분광에 기반한 환경감시 및 헬스케어 분야까지 그 응용범위를 넓힐 수 있을 것ˮ이라고 내다봤다. 또 다른 교신저자인 최덕용 교수는 "연구 과정에서 개발된 공정기법은 다양한 물질의 이종 결합(hybrid integration)을 가능하게 해 미래 양자 인터넷의 핵심 소자인 고효율 양자 광원 및 양자 메모리 분야에도 응용될 수 있다ˮ고 강조했다.
우리 대학 물리학과 김대곤 박사과정 학생과 한상윤 박사후연구원(現 대구경북과학기술원 교수)이 공동 제1 저자로 참여한 공동연구팀의 이번 논문은 국제학술지 `네이쳐 커뮤니케이션스(Nature Communications)' 11월 23일 字에 실렸다. (논문명: Universal light-guiding geometry for on-chip resonators having extremely high Q-factor)
한편 이번 연구는 2018년 삼성미래기술육성사업에 선정돼 지속적인 지원을 받아 수행됐다.
초소형·저전력·저잡음 브릴루앙 레이저 구현 성공
우리 대학 물리학과 이한석, 이용희 교수 공동연구팀(초세대협업연구실)이 경북대학교 최무한 교수, 호주국립대학교 최덕용 교수 연구팀과 공동연구를 통해 초소형·저전력·저잡음 *브릴루앙 레이저를 구현하는 데 성공했다고 23일 밝혔다. 주파수의 흔들림이 거의 없는 초소형·저전력·저잡음 광원은 차세대 초정밀 광센서 구성에 필요한 핵심 소자다.
☞ 브릴루앙 레이저(Brillouin laser): *브릴루앙 산란에 기반해 레이저 빛을 생성 증폭하며, 따라서 레이저의 매질이 브릴루앙 산란을 쉽게 일으킬수록 더 작은 에너지로도 작동할 수 있다. 출력 레이저 빛은 입력된 펌프 빛보다 주파수의 흔들림이 작고 매우 낮은 잡음을 갖는다.
☞ 브릴루앙 산란(Brillouin scattering): 빛이 매질과 상호작용을 통해 음파(acoustic phonon)를 생성하고 산란되는 현상. 산란된 빛은 음파의 에너지에 대응되는 주파수 감소를 겪으며, 유도 방출(stimulated emission) 즉 동일한 특성의 빛을 복제하는 것이 가능해 레이저 구성에 이용될 수 있다.
공동연구팀은 기존에 주로 사용돼온 물질보다 브릴루앙 산란 현상이 수백 배 잘 일어나는 칼코겐화합물 유리를 기반으로 브릴루앙 레이저를 개발함으로써 성능을 극대화했다. 칼코겐화합물 유리는 화학적 불안정성으로 인해 칩 상에서 식각을 통한 성형이 어렵다는 근본적인 약점이 있지만 연구팀은 증착 과정에서 자발적으로 광소자가 구성되는 새로운 제작 기법을 개발해 이런 문제를 해결했다.
연구팀이 개발한 제작 기법은 겨울철 지붕 위에 쌓인 눈의 형태가 지붕의 형태에 의해 정해지므로 눈을 직접 만지지 않고서도 지붕의 형태만을 조절해 원하는 눈의 형태를 얻는 것에 비유할 수 있다. 즉, 현재 반도체 공정 기술로 가공하기 쉬운 산화규소를 이용해 바닥구조를 적절히 형성하면, 그 위에 칼코겐화합물 유리를 증착하는 것만으로도 우수한 성능의 광소자가 자발적으로 형성되는 현상을 최초로 입증한 것이다.
공동연구팀은 자체 개발한 이 제작 기법을 활용해서 칼코겐화합물 유리 기반 고성능 브릴루앙 레이저를 반도체 칩 상에 초소형 광소자의 형태로 구현하는 데 성공했다. 또 기존 기록보다 100배 이상 낮은 펌프 에너지로도 레이저 구동이 가능함을 밝혔다.
공동연구팀 관계자는 "소형화 및 저전력 구동은 상용화를 위한 필수적인 요소ˮ라면서 "공동연구팀의 브릴루앙 레이저 광원 개발은 자율주행에 필요한 거리뿐만 아니라 회전관성 센서의 감도를 획기적으로 개선하는 등 차세대 광센서 개발에 널리 활용될 것으로 기대가 크다ˮ고 말했다.
그는 또 "연구 과정에서 개발한 신공정 기법은 지금껏 활용할 수 없었던 다양한 물질을 미세 광학소자 분야에 도입, 가능케 했다는 점에서 매우 의미가 클 뿐 아니라 향후 널리 활용될 가능성이 큰 원천기술이다ˮ라고 의미를 부여했다.
이번 연구를 주도한 교신저자 이한석 교수는 "칼코겐화합물 유리는 다양한 분자의 흡수선이 존재하는 중적외선 대역에도 적용 가능해 분자 분광에 기반한 환경감시 및 헬스케어 분야까지 그 응용범위를 넓힐 수 있을 것ˮ이라고 내다봤다. 또 다른 교신저자인 최덕용 교수는 "연구 과정에서 개발된 공정기법은 다양한 물질의 이종 결합(hybrid integration)을 가능하게 해 미래 양자 인터넷의 핵심 소자인 고효율 양자 광원 및 양자 메모리 분야에도 응용될 수 있다ˮ고 강조했다.
우리 대학 물리학과 김대곤 박사과정 학생과 한상윤 박사후연구원(現 대구경북과학기술원 교수)이 공동 제1 저자로 참여한 공동연구팀의 이번 논문은 국제학술지 `네이쳐 커뮤니케이션스(Nature Communications)' 11월 23일 字에 실렸다. (논문명: Universal light-guiding geometry for on-chip resonators having extremely high Q-factor)
한편 이번 연구는 2018년 삼성미래기술육성사업에 선정돼 지속적인 지원을 받아 수행됐다.
2020.12.23
조회수 48431
-
 노용만·장동의 교수팀, 전장상황에서의 자율비행 기술경진대회 최우수상 수상
우리 대학 전기및전자공학부 노용만·장동의 교수 공동연구팀(김휘민 박사과정, 이홍주 박사과정, 김정욱 박사과정, 이창식 석사과정, 최대휘 석사과정, 김병천 석사과정, 조용준 석사과정, Tianqi Wang 석사과정, 한승희 학사과정)이 지난 2020년 10월 21일 대전 한밭체육관에서 진행된 전장상황에서의 자율비행 기술경진대회 본선에서 1등으로 최우수상(방위사업청장상)을 수상했다.
2019년 12월에 예선, 2020년 10월에 본선을 진행해 제1회를 마무리한 전장상황에서의 자율비행 기술경진대회는 방위사업청과 대전광역시에서 공동주최하고, 국방과학연구소와 대전 테크노파트에서 공동주관하는 미래도전국방기술사업 기술경진대회다. 대회에 참가하는 전국의 각 팀은 GPS 및 통신불가 환경에서 자율비행으로 사전정보가 없는 영역에 대한 정찰 임무를 수행하는 드론 기술을 개발하고 선보였다.
본선 대회에서는 주최측에서 제공한 드론으로 1. 자율비행 중 영상 기반 표적 인식, 2. 자율비행으로 장애물 회피 코스 돌파, 3. 자율비행으로 사전 정보가 없는 환경을 탐색한 후 임무 시작 지점으로 복귀하는 등 총 3가지 임무를 수행해야 하며, 노용만·장동의 교수 공동연구팀은 다른 팀들보다 우수한 성적으로 모든 임무를 완수했다.
이번 최우수상은 노용만 교수 연구팀이 보유한 최첨단 영상 기반 표적인식 기술과 장동의 교수 연구팀이 보유한 상태 추정, SLAM, 경로 및 궤적 계획, 비행 제어 등 최첨단 자율비행 기술을 융합하고 발전시켜 이루어낸 쾌거이다.
노용만·장동의 교수팀, 전장상황에서의 자율비행 기술경진대회 최우수상 수상
우리 대학 전기및전자공학부 노용만·장동의 교수 공동연구팀(김휘민 박사과정, 이홍주 박사과정, 김정욱 박사과정, 이창식 석사과정, 최대휘 석사과정, 김병천 석사과정, 조용준 석사과정, Tianqi Wang 석사과정, 한승희 학사과정)이 지난 2020년 10월 21일 대전 한밭체육관에서 진행된 전장상황에서의 자율비행 기술경진대회 본선에서 1등으로 최우수상(방위사업청장상)을 수상했다.
2019년 12월에 예선, 2020년 10월에 본선을 진행해 제1회를 마무리한 전장상황에서의 자율비행 기술경진대회는 방위사업청과 대전광역시에서 공동주최하고, 국방과학연구소와 대전 테크노파트에서 공동주관하는 미래도전국방기술사업 기술경진대회다. 대회에 참가하는 전국의 각 팀은 GPS 및 통신불가 환경에서 자율비행으로 사전정보가 없는 영역에 대한 정찰 임무를 수행하는 드론 기술을 개발하고 선보였다.
본선 대회에서는 주최측에서 제공한 드론으로 1. 자율비행 중 영상 기반 표적 인식, 2. 자율비행으로 장애물 회피 코스 돌파, 3. 자율비행으로 사전 정보가 없는 환경을 탐색한 후 임무 시작 지점으로 복귀하는 등 총 3가지 임무를 수행해야 하며, 노용만·장동의 교수 공동연구팀은 다른 팀들보다 우수한 성적으로 모든 임무를 완수했다.
이번 최우수상은 노용만 교수 연구팀이 보유한 최첨단 영상 기반 표적인식 기술과 장동의 교수 연구팀이 보유한 상태 추정, SLAM, 경로 및 궤적 계획, 비행 제어 등 최첨단 자율비행 기술을 융합하고 발전시켜 이루어낸 쾌거이다.
2020.11.20
조회수 27880
-
 김진환 교수팀, 국제 자율무인선 알고리즘 경진대회 우승
우리대학 기계공학과 학부생과 대학원생으로 구성된 학생팀(지도교수 김진환)이 `2019 국제 자율무인선 알고리즘 경진대회(2019 Virtual RobotX Competition)'에서 우승을 차지했다.
미 해군 연구개발국(ONR. U.S. Office of Naval Research)의 주최로 올해 처음 열린‘국제 자율무인선 알고리즘 경진대회’는 지난 9월 첫 알고리즘 코드 제출을 시작으로 약 3개월에 걸쳐 진행됐다. 한국·미국·중국·일본·호주·싱가포르 등 9개국 17개 대학팀이 참가했는데 국내 대학으로는 KAIST가 유일하게 출전했다.
이번 대회에는 미 해군대학원(NPS, Naval Postgraduate School)이 구축한 가상 환경이 도입됐다. 실제 바다에서 발생할 수 있는 바람·파도·조류 조건 등을 임의로 조절할 수 있는 공통의 가상 환경에 각 팀이 제출한 컴퓨터 알고리즘 코드를 적용해 결과물을 평가하는 방식으로 진행됐다.
각 참가팀에는 ▲바람과 파도 등이 영향을 미치는 바다 위에서 무인선의 위치와 방향을 일정하게 유지하기 ▲주어진 항로와 방향을 정확히 제어하며 목표점까지 이동하기 ▲해상에 나타난 임의의 물체를 탐지해서 정확한 위치를 찾고 물체의 구체적인 종류를 인식하기 ▲항해 부표를 따라가되 동시에 장애물을 피해 목표점까지 이동하기 ▲해상에 놓인 여러 개의 해상 도크(dock)에 표시된 마커의 모양과 색상을 인식하여 목표 도크 위치를 찾기 ▲목표 도크에 자동으로 진입해서 일정 시간 정박 후에 빠져나오기 등 모두 6개의 임무가 주어졌다.
주최 측은 참가 팀이 제출한 컴퓨터 알고리즘 코드에 다양한 가상 환경 조건을 적용한 뒤 주어진 임무의 수행도를 평가하고 6개 미션에 대한 성적을 모두 합산해 최종 순위를 결정했다.
KAIST팀은 총 3차례의 알고리즘 코드 제출과 평가를 거친 끝에 2개 종목에서 1위, 2개 종목에서 2위를 차지하는 등 6개의 전 종목에서 우수한 성적을 거뒀으며, 17개 참가팀 중 가장 높은 합산 성적을 기록해 종합 우승을 차지했다.
종합 2위와 3위는 미국의 조지아 공과대학(Georgia Tech)과 호주의 시드니 대학(University of Sydney)이 각각 차지했다. 지난 4일~6일 싱가포르에서 개최된 2019 RobotX Interactive Forum에서 진행된 시상식에는 김종휘·장준우 학생이 KAIST 대표로 참가해 수상했다.
〈2019 국제 자율무인선 알고리즘 경진대회 우승팀 (왼쪽 뒷줄부터 시계방향으로) 성수환(학사과정, 제어/경로계획-항법), 김종휘(박사과정, 리더/인식 알고리즘 총괄), 박진욱(석사과정-제어/경로계획-운동제어), 김태원(학사과정,탐지/인식-센서), 김준형(학사과정,탐지/인식-센서), 김경서(석사과정-제어/경로계획-경로계획), 조현근(석사과정, 탐지/인식-딥러닝), 장준우(석박사통합과정-제어 알고리즘 총괄), 홍승조(석사과정, 탐지/인식-센서융합)>
팀 리더를 맡은 김종휘 기계공학과 박사과정 학생은 "지난 수개월 동안 대회를 준비하면서 밤을 꼬박 새우는 날이 많았지만 학교에서 배운 지식이 가상 환경에서 실제로 적용되는 것을 보는 것이 모두에게 즐겁고 보람있는 경험이었다ˮ고 말했다. 김종휘 학생은 이어 "세계적으로 유명한 여러 대학팀들이 참가한 대회에서 우리나라를 대표해 좋은 성적으로 거두게 되어 기쁘다ˮ라고 우승 소감을 밝혔다.
김진환 기계공학과 교수가 지도하는 KAIST팀은 지난 2014년 싱가포르 마리나 베이에서 실제 무인 선박을 이용해 진행된 제1회 국제 자율무인선 경진대회에서 MIT에 이어 준우승을 차지한 바 있는데 이번 대회에서 우승을 차지함으로써 자율무인선 분야에서 KAIST가 보유한 우수한 기술력을 전 세계에 과시했다.
김진환 교수팀, 국제 자율무인선 알고리즘 경진대회 우승
우리대학 기계공학과 학부생과 대학원생으로 구성된 학생팀(지도교수 김진환)이 `2019 국제 자율무인선 알고리즘 경진대회(2019 Virtual RobotX Competition)'에서 우승을 차지했다.
미 해군 연구개발국(ONR. U.S. Office of Naval Research)의 주최로 올해 처음 열린‘국제 자율무인선 알고리즘 경진대회’는 지난 9월 첫 알고리즘 코드 제출을 시작으로 약 3개월에 걸쳐 진행됐다. 한국·미국·중국·일본·호주·싱가포르 등 9개국 17개 대학팀이 참가했는데 국내 대학으로는 KAIST가 유일하게 출전했다.
이번 대회에는 미 해군대학원(NPS, Naval Postgraduate School)이 구축한 가상 환경이 도입됐다. 실제 바다에서 발생할 수 있는 바람·파도·조류 조건 등을 임의로 조절할 수 있는 공통의 가상 환경에 각 팀이 제출한 컴퓨터 알고리즘 코드를 적용해 결과물을 평가하는 방식으로 진행됐다.
각 참가팀에는 ▲바람과 파도 등이 영향을 미치는 바다 위에서 무인선의 위치와 방향을 일정하게 유지하기 ▲주어진 항로와 방향을 정확히 제어하며 목표점까지 이동하기 ▲해상에 나타난 임의의 물체를 탐지해서 정확한 위치를 찾고 물체의 구체적인 종류를 인식하기 ▲항해 부표를 따라가되 동시에 장애물을 피해 목표점까지 이동하기 ▲해상에 놓인 여러 개의 해상 도크(dock)에 표시된 마커의 모양과 색상을 인식하여 목표 도크 위치를 찾기 ▲목표 도크에 자동으로 진입해서 일정 시간 정박 후에 빠져나오기 등 모두 6개의 임무가 주어졌다.
주최 측은 참가 팀이 제출한 컴퓨터 알고리즘 코드에 다양한 가상 환경 조건을 적용한 뒤 주어진 임무의 수행도를 평가하고 6개 미션에 대한 성적을 모두 합산해 최종 순위를 결정했다.
KAIST팀은 총 3차례의 알고리즘 코드 제출과 평가를 거친 끝에 2개 종목에서 1위, 2개 종목에서 2위를 차지하는 등 6개의 전 종목에서 우수한 성적을 거뒀으며, 17개 참가팀 중 가장 높은 합산 성적을 기록해 종합 우승을 차지했다.
종합 2위와 3위는 미국의 조지아 공과대학(Georgia Tech)과 호주의 시드니 대학(University of Sydney)이 각각 차지했다. 지난 4일~6일 싱가포르에서 개최된 2019 RobotX Interactive Forum에서 진행된 시상식에는 김종휘·장준우 학생이 KAIST 대표로 참가해 수상했다.
〈2019 국제 자율무인선 알고리즘 경진대회 우승팀 (왼쪽 뒷줄부터 시계방향으로) 성수환(학사과정, 제어/경로계획-항법), 김종휘(박사과정, 리더/인식 알고리즘 총괄), 박진욱(석사과정-제어/경로계획-운동제어), 김태원(학사과정,탐지/인식-센서), 김준형(학사과정,탐지/인식-센서), 김경서(석사과정-제어/경로계획-경로계획), 조현근(석사과정, 탐지/인식-딥러닝), 장준우(석박사통합과정-제어 알고리즘 총괄), 홍승조(석사과정, 탐지/인식-센서융합)>
팀 리더를 맡은 김종휘 기계공학과 박사과정 학생은 "지난 수개월 동안 대회를 준비하면서 밤을 꼬박 새우는 날이 많았지만 학교에서 배운 지식이 가상 환경에서 실제로 적용되는 것을 보는 것이 모두에게 즐겁고 보람있는 경험이었다ˮ고 말했다. 김종휘 학생은 이어 "세계적으로 유명한 여러 대학팀들이 참가한 대회에서 우리나라를 대표해 좋은 성적으로 거두게 되어 기쁘다ˮ라고 우승 소감을 밝혔다.
김진환 기계공학과 교수가 지도하는 KAIST팀은 지난 2014년 싱가포르 마리나 베이에서 실제 무인 선박을 이용해 진행된 제1회 국제 자율무인선 경진대회에서 MIT에 이어 준우승을 차지한 바 있는데 이번 대회에서 우승을 차지함으로써 자율무인선 분야에서 KAIST가 보유한 우수한 기술력을 전 세계에 과시했다.
2019.12.26
조회수 7989
-
 한동수 교수, 크라우드소싱 기반의 실내 위치인식 기술 개발
〈 한동수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형서비스통합 연구실)이 크라우드소싱 기반의 실내 위치 인식 기술을 개발했다.
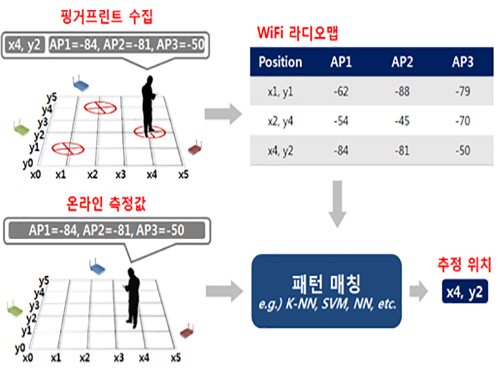
이번 기술은 스마트폰에 탑재된 다양한 센서를 통해 수집된 신호를 기반으로 무선랜 신호(일명 핑거프린트)의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다.
무선랜 신호가 존재하고 스마트폰이 사용되는 건물이면 어디든 적용할 수 있고 정확도가 높아 도심의 실내 위치 인식 시스템 구축비용을 획기적으로 줄일 수 있을 것으로 기대된다.
세계적인 주요 IT 기업들은 실내 환경에서 정확도 높은 위치정보를 제공하기 위해 다양한 노력을 해 왔지만, 정확도 높은 라디오맵(특정 지역이나 건물의 신호 특성) 구축에 많은 어려움을 겪고 있다. 주로 활용되는 와이파이 포지셔닝 시스템(WPS)는 건물의 층을 구분하지 못한다는 한계가 있다.
연구팀은 문제 해결을 위해 우선 불특정 다수의 스마트폰을 통해 수집된 무선신호를 클러스터링을 통해 건물별로 분류한 뒤 기압 정보를 통해 다시 층별로 분류했다. 연구팀은 날씨 변화로 인한 기압 정보 측정에 어려움을 겪던 기존 기술의 한계를 극복하고 수집된 무선신호를 층별로 구분하는 기법을 새롭게 개발했다.
연구팀은 새로 개발한 반자율학습 위치 라벨링 AI 기법을 통해 무선신호의 수집 위치를 라벨링했다. 관성 센서 기반의 관성항법(Pedestrian Dead Reckoning) 기법을 접목해 초기 라디오맵을 구축했고, 관성 센서로부터 얻어지는 신호 정보 없이 수집된 무선신호는 지역 탐색과 전역 탐색을 반복적으로 수행하는 최적화 기계학습 알고리즘을 통해 수집 위치를 최적화했다.
연구팀은 지하 2층, 지상 6층의 12만 평 규모의 실내 쇼핑몰을 대상으로 정확도를 측정한 결과 3~6미터 수준의 정확도를 보임을 확인했다. 층 구분 정확도도 95% 이상 가능해 수작업을 통한 정확도를 넘어서는 결과를 보였고, 도시 전체 건물에 적용했을 때도 유사한 결과를 얻을 수 있을 것으로 예상했다.
이번에 개발한 기술을 주요 IT 기업, 통신사, 온라인 쇼핑사의 앱을 통해서 수집된 신호에 적용하면 도시 및 국가 규모의 실내 위치 인프라를 손쉽게 구축할 수 있을 것으로 예상된다.
한동수 교수는 “대규모 무선신호를 수집할 수 있는 기업이 해당 기술을 도입하면 가까운 미래에 대부분의 실내 공간에서도 5~10미터 수준의 정확도 높은 위치 인식 서비스가 제공될 수 있을 것이다”라며 “실내외 통합 내비게이션, 응급 호출 서비스 등 스마트시티를 구현하는 데 유용하게 활용될 수 있을 것이다”라고 말했다.
□ 그림 설명
그림1.KAILOS 개념도
한동수 교수, 크라우드소싱 기반의 실내 위치인식 기술 개발
〈 한동수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형서비스통합 연구실)이 크라우드소싱 기반의 실내 위치 인식 기술을 개발했다.
이번 기술은 스마트폰에 탑재된 다양한 센서를 통해 수집된 신호를 기반으로 무선랜 신호(일명 핑거프린트)의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다.
무선랜 신호가 존재하고 스마트폰이 사용되는 건물이면 어디든 적용할 수 있고 정확도가 높아 도심의 실내 위치 인식 시스템 구축비용을 획기적으로 줄일 수 있을 것으로 기대된다.
세계적인 주요 IT 기업들은 실내 환경에서 정확도 높은 위치정보를 제공하기 위해 다양한 노력을 해 왔지만, 정확도 높은 라디오맵(특정 지역이나 건물의 신호 특성) 구축에 많은 어려움을 겪고 있다. 주로 활용되는 와이파이 포지셔닝 시스템(WPS)는 건물의 층을 구분하지 못한다는 한계가 있다.
연구팀은 문제 해결을 위해 우선 불특정 다수의 스마트폰을 통해 수집된 무선신호를 클러스터링을 통해 건물별로 분류한 뒤 기압 정보를 통해 다시 층별로 분류했다. 연구팀은 날씨 변화로 인한 기압 정보 측정에 어려움을 겪던 기존 기술의 한계를 극복하고 수집된 무선신호를 층별로 구분하는 기법을 새롭게 개발했다.
연구팀은 새로 개발한 반자율학습 위치 라벨링 AI 기법을 통해 무선신호의 수집 위치를 라벨링했다. 관성 센서 기반의 관성항법(Pedestrian Dead Reckoning) 기법을 접목해 초기 라디오맵을 구축했고, 관성 센서로부터 얻어지는 신호 정보 없이 수집된 무선신호는 지역 탐색과 전역 탐색을 반복적으로 수행하는 최적화 기계학습 알고리즘을 통해 수집 위치를 최적화했다.
연구팀은 지하 2층, 지상 6층의 12만 평 규모의 실내 쇼핑몰을 대상으로 정확도를 측정한 결과 3~6미터 수준의 정확도를 보임을 확인했다. 층 구분 정확도도 95% 이상 가능해 수작업을 통한 정확도를 넘어서는 결과를 보였고, 도시 전체 건물에 적용했을 때도 유사한 결과를 얻을 수 있을 것으로 예상했다.
이번에 개발한 기술을 주요 IT 기업, 통신사, 온라인 쇼핑사의 앱을 통해서 수집된 신호에 적용하면 도시 및 국가 규모의 실내 위치 인프라를 손쉽게 구축할 수 있을 것으로 예상된다.
한동수 교수는 “대규모 무선신호를 수집할 수 있는 기업이 해당 기술을 도입하면 가까운 미래에 대부분의 실내 공간에서도 5~10미터 수준의 정확도 높은 위치 인식 서비스가 제공될 수 있을 것이다”라며 “실내외 통합 내비게이션, 응급 호출 서비스 등 스마트시티를 구현하는 데 유용하게 활용될 수 있을 것이다”라고 말했다.
□ 그림 설명
그림1.KAILOS 개념도
2019.06.10
조회수 6321
-
 공승현 교수 연구실 KAT팀, 2018 국제대학생자율주행경진대회 우승
〈 우승을 차지한 KAT 팀 〉
우리 대학 조천식녹색교통대학원 공승현 교수 연구팀으로 구성된 KAT(Kaist Autonomous Technologies) 팀(이병관 팀장, 심영보, 최충재, 성기호, 김민준, 이남형, 조상재, 김보성, 운봉영, 김태선, 백승호 팀원)이 ‘2018 국제대학생자율주행경진대회’에서 우승을 차지했다.
산업통상자원부가 주최한 이번 대회는 지난 2일 대구 수성알파시티의 실제 도로에서 진행됐다. 대통령상을 수상한 KAT 팀은 5천만 원의 상금과 해외연수 혜택을 받는다.
올해부터 대통령배로 격상된 이번 대회는 수성알파시티 내 실제 도로 상에서 실제 도로 환경에 적응된 자율주행기술과 자동차 통신(V2X) 기술이 모두 활용된 CAV(Connected Autonomous Vehicles)를 통해 경쟁을 진행했다.
이번 대회에 참가한 자동차는 양방향 일반적인 도로 뿐 아니라 GPS가 동작하지 않는 터널 내 양방향 1차선 도로를 통과하는 정밀항법 기술을 갖춰야 했다. 또한 대회가 진행된 오후 5시 이후에는 주행 도로 맞은편에서 비치는 역광에도 강건한 카메라 기반 인식 기술도 구비돼야 했다.
이번 대회의 경쟁 방식은 대회 지역 전체에 흩어져 시시각각 변하는 가상의 승객(택배)들의 현재 위치와 행선지 그리고 주행 거리 및 난이도에 따른 서비스 수익을 모든 자율주행자동차들에게 V2X를 통해 알려주고 자동차들이 각자 승객을 선택해 먼저 태우고 행선지까지 데려다 주면 점수를 얻는 방식이다.
반대로 차선이나 교통신호를 위반할 시 감점이 발생하고 특히 기술적 미숙함으로 자율주행을 멈추고 운전석에 앉은 참여자가 주행에 조금이라도 개입하면 큰 감점을 받게 된다.
KAT팀의 심영보 연구원은 “손님을 선택하는 알고리즘과 자율주행의 기술적 우위가 실제 경선에서 우수한 점수를 얻게 된 것 같다”고 말했다.
이번 대회는 실제 도로에서 경쟁하는 최초의 국제대회로 국내 단일팀 4팀과 중국 칭화 대학교, 일본 와세다 대학교 등 외국대학 팀과 연합한 5개 팀 등 총 9개 팀이 출전했다. KAT팀은 기술교류 차원에서 중국의 칭화 대학교와 연합팀으로 출전했다.
공 교수는 “혼잡한 도로 교통 상황에서도 유연하게 주행하는 자율주행자동차까지는 아직도 기술적 어려움이 많이 남아있다”며 “그러한 높은 완성도의 기술까지 KAT팀의 자율주행기술 연구를 지속할 계획이다”고 말했다.
〈 대회에서 신호를 기다리고 있는 KAT팀의 자율주행자동차 〉
공승현 교수 연구실 KAT팀, 2018 국제대학생자율주행경진대회 우승
〈 우승을 차지한 KAT 팀 〉
우리 대학 조천식녹색교통대학원 공승현 교수 연구팀으로 구성된 KAT(Kaist Autonomous Technologies) 팀(이병관 팀장, 심영보, 최충재, 성기호, 김민준, 이남형, 조상재, 김보성, 운봉영, 김태선, 백승호 팀원)이 ‘2018 국제대학생자율주행경진대회’에서 우승을 차지했다.
산업통상자원부가 주최한 이번 대회는 지난 2일 대구 수성알파시티의 실제 도로에서 진행됐다. 대통령상을 수상한 KAT 팀은 5천만 원의 상금과 해외연수 혜택을 받는다.
올해부터 대통령배로 격상된 이번 대회는 수성알파시티 내 실제 도로 상에서 실제 도로 환경에 적응된 자율주행기술과 자동차 통신(V2X) 기술이 모두 활용된 CAV(Connected Autonomous Vehicles)를 통해 경쟁을 진행했다.
이번 대회에 참가한 자동차는 양방향 일반적인 도로 뿐 아니라 GPS가 동작하지 않는 터널 내 양방향 1차선 도로를 통과하는 정밀항법 기술을 갖춰야 했다. 또한 대회가 진행된 오후 5시 이후에는 주행 도로 맞은편에서 비치는 역광에도 강건한 카메라 기반 인식 기술도 구비돼야 했다.
이번 대회의 경쟁 방식은 대회 지역 전체에 흩어져 시시각각 변하는 가상의 승객(택배)들의 현재 위치와 행선지 그리고 주행 거리 및 난이도에 따른 서비스 수익을 모든 자율주행자동차들에게 V2X를 통해 알려주고 자동차들이 각자 승객을 선택해 먼저 태우고 행선지까지 데려다 주면 점수를 얻는 방식이다.
반대로 차선이나 교통신호를 위반할 시 감점이 발생하고 특히 기술적 미숙함으로 자율주행을 멈추고 운전석에 앉은 참여자가 주행에 조금이라도 개입하면 큰 감점을 받게 된다.
KAT팀의 심영보 연구원은 “손님을 선택하는 알고리즘과 자율주행의 기술적 우위가 실제 경선에서 우수한 점수를 얻게 된 것 같다”고 말했다.
이번 대회는 실제 도로에서 경쟁하는 최초의 국제대회로 국내 단일팀 4팀과 중국 칭화 대학교, 일본 와세다 대학교 등 외국대학 팀과 연합한 5개 팀 등 총 9개 팀이 출전했다. KAT팀은 기술교류 차원에서 중국의 칭화 대학교와 연합팀으로 출전했다.
공 교수는 “혼잡한 도로 교통 상황에서도 유연하게 주행하는 자율주행자동차까지는 아직도 기술적 어려움이 많이 남아있다”며 “그러한 높은 완성도의 기술까지 KAT팀의 자율주행기술 연구를 지속할 계획이다”고 말했다.
〈 대회에서 신호를 기다리고 있는 KAT팀의 자율주행자동차 〉
2018.11.05
조회수 6204
-
 서창호 교수, IT 젊은 공학자상 수상
우리 대학 전기및전자공학부 서창호 교수가 미국전기전자학회(IEEE)와 대한전자공학회(IEIE)가 공동 주관하고 해동과학문화재단이 후원하는 ‘IT 젊은 공학자상’ 수상자로 선정됐다.
시상식은 6월 28일 오후 6시 제주롯데호텔에서 열렸다.
2006년부터 시작해 13회째 진행되는 ‘IT 젊은 공학자상’은 만 40세 이하 의 3년 이상 국내에서 연구를 수행한 연구자에게 주어진다. 기술적 실용성, 사회 및 환경에의 공헌도 및 창의성 등을 중심으로 심사가 이뤄진다.
올해의 수상자로 선정된 서창호 교수는 통신시스템, 분산저장시스템, 인공지능 분야 등의 연구를 통해 SCI급 논문 23편, 신경정보처리시스템학회(NIPS)와 머신러닝국제학회(ICML) 등 최상위 국제학회 논문 10편, 국제특허등록 30건 이상의 연구 성과를 보이고 있다.
서 교수의 논문은 4천 100회 이상 인용되는 등 학문 및 기술 발전, 벤처창업지원을 통한 기술상용화에 크게 기여하고 있다. 최근에는 인공지능을 교육에 접목시킨 AI-튜터(AI-tutor)와 딥러닝 기술을 활용한 자율주행시스템을 개발 중이다.
서창호 교수는 “IT 젊은공학자상을 받게 돼 영광으로 생각한다. 앞으로도 학생 지도와 연구에 몰두해 IT/인공지능 분야에 기여할 수 있도록 최선을 다하겠다”고 말했다.
서창호 교수, IT 젊은 공학자상 수상
우리 대학 전기및전자공학부 서창호 교수가 미국전기전자학회(IEEE)와 대한전자공학회(IEIE)가 공동 주관하고 해동과학문화재단이 후원하는 ‘IT 젊은 공학자상’ 수상자로 선정됐다.
시상식은 6월 28일 오후 6시 제주롯데호텔에서 열렸다.
2006년부터 시작해 13회째 진행되는 ‘IT 젊은 공학자상’은 만 40세 이하 의 3년 이상 국내에서 연구를 수행한 연구자에게 주어진다. 기술적 실용성, 사회 및 환경에의 공헌도 및 창의성 등을 중심으로 심사가 이뤄진다.
올해의 수상자로 선정된 서창호 교수는 통신시스템, 분산저장시스템, 인공지능 분야 등의 연구를 통해 SCI급 논문 23편, 신경정보처리시스템학회(NIPS)와 머신러닝국제학회(ICML) 등 최상위 국제학회 논문 10편, 국제특허등록 30건 이상의 연구 성과를 보이고 있다.
서 교수의 논문은 4천 100회 이상 인용되는 등 학문 및 기술 발전, 벤처창업지원을 통한 기술상용화에 크게 기여하고 있다. 최근에는 인공지능을 교육에 접목시킨 AI-튜터(AI-tutor)와 딥러닝 기술을 활용한 자율주행시스템을 개발 중이다.
서창호 교수는 “IT 젊은공학자상을 받게 돼 영광으로 생각한다. 앞으로도 학생 지도와 연구에 몰두해 IT/인공지능 분야에 기여할 수 있도록 최선을 다하겠다”고 말했다.
2018.07.05
조회수 9760
-
 AI 월드컵 2017 대회, AI 축구종목서 전북대 AR Lab 우승
우리학교 공과대학(학장 김종환)이 1일 세계 최초로 개최한 인공지능 축구대회인 ‘AI 월드컵 2017’의 축구종목 결선대회에서 전북대 자율로봇연구실 소속 석사 및 박사과정 학생과 박사 등 4명으로 구성된 AR Lab이 우승해 상금 1000만원을 차지했다. AI 축구는 4차 산업혁명의 핵심기술인 Q-Learning을 포함한 AI기술과 딥 러닝 방식을 기반으로 각 팀당 5대의 학습된 가상의 선수로봇이 참가자의 조작 없이 상대팀 골대에 골을 넣어 득점하는 방식으로 진행하는 축구 경기로 전·후반 각 5분씩, 그리고 인공지능 구현방법 발표 5분 등 총 15분에 걸쳐 진행됐다. 준우승은 우리대학 전기및전자공학부 소속 학생 6명으로 구성된 WISRL이 차지해 500만원의 상금을 획득했고 공동 3위는 우리대학 AIM팀과 KAIST BML팀이 각각 차지했다. AI 경기해설 및 AI 기자 종목은 심사기준을 충족시키는 팀이 없어 각각 2개 종목에서는 우승팀을 선정하지 않고 AI 경기해설 종목에서 얄리팀을, AI 기자 종목에서는 KAIST Deep CMT 팀을 각각 장려상 수상자로 선정했다.
AI 월드컵 2017 대회, AI 축구종목서 전북대 AR Lab 우승
우리학교 공과대학(학장 김종환)이 1일 세계 최초로 개최한 인공지능 축구대회인 ‘AI 월드컵 2017’의 축구종목 결선대회에서 전북대 자율로봇연구실 소속 석사 및 박사과정 학생과 박사 등 4명으로 구성된 AR Lab이 우승해 상금 1000만원을 차지했다. AI 축구는 4차 산업혁명의 핵심기술인 Q-Learning을 포함한 AI기술과 딥 러닝 방식을 기반으로 각 팀당 5대의 학습된 가상의 선수로봇이 참가자의 조작 없이 상대팀 골대에 골을 넣어 득점하는 방식으로 진행하는 축구 경기로 전·후반 각 5분씩, 그리고 인공지능 구현방법 발표 5분 등 총 15분에 걸쳐 진행됐다. 준우승은 우리대학 전기및전자공학부 소속 학생 6명으로 구성된 WISRL이 차지해 500만원의 상금을 획득했고 공동 3위는 우리대학 AIM팀과 KAIST BML팀이 각각 차지했다. AI 경기해설 및 AI 기자 종목은 심사기준을 충족시키는 팀이 없어 각각 2개 종목에서는 우승팀을 선정하지 않고 AI 경기해설 종목에서 얄리팀을, AI 기자 종목에서는 KAIST Deep CMT 팀을 각각 장려상 수상자로 선정했다.
2017.12.04
조회수 11393
-
 제2회 전국 고등학교 동아리 SW 경진대회 개최
우리대학과 충남대학교(총장 오덕성)가 ‘전국 고등학교 동아리 소프트웨어(SW) 경진대회’ 참가자를 모집한다. 지난해에 이어 두 번째 개최되는 이 경진대회는 우리대학 SW교육센터와 충남대 SW중심대학사업단이 공동으로 주관하고 미래창조과학부와 정보통신기술진흥센터(IITP)가 주최한다. 두 대학은 SW를 통한 창의적 문제해결 능력 및 협업 능력제고 등 전국 고교생을 대상으로 우수 SW 인재발굴과 SW 동아리 활성화를 위해 작년 11월 이 대회를 처음 개최했다.
이 대회에는 일반고·특성화고·자율고(자사고, 자공고)·특목고(외고, 마이스터고, 과학고, 영재고, 체육고 등 포함) 등 모든 유형의 전국 고등학교 교내 SW관련 동아리에 소속된 학생이면 누구나 3~5명 단위로 프로젝트팀을 구성해 참여할 수 있다. 이번 대회의 프로젝트 주제는 ‘SW를 통한 일상생활 속의 아이디어 실현’이지만 관심 있는 분야에 대한 어떠한 아이디어든 사실상 제한이 없다. 지난 대회에서는 전국에서 120여 개 팀이 예선에 참여하는 등 높은 참여율을 보였는데 본선에 진출한 24개 팀 가운데 ‘SWAG팀(인천청라고)’이 금상을 받았다.
경진대회에 참가를 희망하는 고등학생은 우리대학 SW교육센터 홈페이지( http://swe.kaist.ac.kr )에서 신청서와 프로젝트 개발 계획서를 다운받아 작성한 후 접수하면 된다. 예선 신청 접수기간은 17일부터 21일까지 5일간 이다. 신청자들은 1차 예선을 거치게 되는데 우리대학과 충남대는 참가 신청자들이 제출한 프로젝트 개발 계획서에 대한 심사를 한 다음 본선에 진출할 25개 팀을 선정, 8월 1일 홈페이지를 통해 예선결과를 발표할 계획이다.
10월 28일 우리대학 문지캠퍼스 슈펙스홀에서 치러질 예정인 본선대회에서는 팀별 전시부스에서 구현된 프로젝트 결과물(포스터 발표·데모) 발표를 통해 수상 팀을 최종 선정해 우리대학 신성철 총장과 오덕성 충남대 총장이 공동으로 시상한다. 수상자들에게는 상장과 함께 금상 1개 팀에는 200만원, 은상 2개 팀에게는 각 100만원, 그리고 동상 3개 팀에는 각 50만원의 상금이 수여되는 등 장려상까지 모든 수상 팀에게 상장과 함께 부상이 순위별로 차등 지급된다.
두 대학은 이밖에 본선 당일 참가자 및 참관학생 전원을 대상으로 전시부스 관람은 물론 고교생들의 SW에 대한 관심 제고를 위해 다양한 프로그램도 마련해 함께 진행할 방침이다. 문의 042-350-6022(KAIST SW교육센터), 042-821-8672(충남대 SW중심대학사업단).
제2회 전국 고등학교 동아리 SW 경진대회 개최
우리대학과 충남대학교(총장 오덕성)가 ‘전국 고등학교 동아리 소프트웨어(SW) 경진대회’ 참가자를 모집한다. 지난해에 이어 두 번째 개최되는 이 경진대회는 우리대학 SW교육센터와 충남대 SW중심대학사업단이 공동으로 주관하고 미래창조과학부와 정보통신기술진흥센터(IITP)가 주최한다. 두 대학은 SW를 통한 창의적 문제해결 능력 및 협업 능력제고 등 전국 고교생을 대상으로 우수 SW 인재발굴과 SW 동아리 활성화를 위해 작년 11월 이 대회를 처음 개최했다.
이 대회에는 일반고·특성화고·자율고(자사고, 자공고)·특목고(외고, 마이스터고, 과학고, 영재고, 체육고 등 포함) 등 모든 유형의 전국 고등학교 교내 SW관련 동아리에 소속된 학생이면 누구나 3~5명 단위로 프로젝트팀을 구성해 참여할 수 있다. 이번 대회의 프로젝트 주제는 ‘SW를 통한 일상생활 속의 아이디어 실현’이지만 관심 있는 분야에 대한 어떠한 아이디어든 사실상 제한이 없다. 지난 대회에서는 전국에서 120여 개 팀이 예선에 참여하는 등 높은 참여율을 보였는데 본선에 진출한 24개 팀 가운데 ‘SWAG팀(인천청라고)’이 금상을 받았다.
경진대회에 참가를 희망하는 고등학생은 우리대학 SW교육센터 홈페이지( http://swe.kaist.ac.kr )에서 신청서와 프로젝트 개발 계획서를 다운받아 작성한 후 접수하면 된다. 예선 신청 접수기간은 17일부터 21일까지 5일간 이다. 신청자들은 1차 예선을 거치게 되는데 우리대학과 충남대는 참가 신청자들이 제출한 프로젝트 개발 계획서에 대한 심사를 한 다음 본선에 진출할 25개 팀을 선정, 8월 1일 홈페이지를 통해 예선결과를 발표할 계획이다.
10월 28일 우리대학 문지캠퍼스 슈펙스홀에서 치러질 예정인 본선대회에서는 팀별 전시부스에서 구현된 프로젝트 결과물(포스터 발표·데모) 발표를 통해 수상 팀을 최종 선정해 우리대학 신성철 총장과 오덕성 충남대 총장이 공동으로 시상한다. 수상자들에게는 상장과 함께 금상 1개 팀에는 200만원, 은상 2개 팀에게는 각 100만원, 그리고 동상 3개 팀에는 각 50만원의 상금이 수여되는 등 장려상까지 모든 수상 팀에게 상장과 함께 부상이 순위별로 차등 지급된다.
두 대학은 이밖에 본선 당일 참가자 및 참관학생 전원을 대상으로 전시부스 관람은 물론 고교생들의 SW에 대한 관심 제고를 위해 다양한 프로그램도 마련해 함께 진행할 방침이다. 문의 042-350-6022(KAIST SW교육센터), 042-821-8672(충남대 SW중심대학사업단).
2017.07.10
조회수 15693
-
 한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
한동수 교수, 크라우드소싱 기반 실내 위치인식 시스템 개발
〈 한 동 수 교수 〉
우리 대학 전산학부 한동수 교수 연구팀(지능형 서비스통합 연구실)이 실내 공간에서 획득한 와이파이 신호의 수집 위치정보를 자동으로 파악할 수 있는 기술을 개발했다.
이 기술은 글로벌 실내 위치인식 시스템 구축에 필요한 핵심 기술로 다수의 스마트폰에서 수집된 무선랜 핑거프린트의 수집 위치를 자동으로 라벨링하는 인공지능 기법이다. 비용을 절감하면서 높은 정확도를 가질 수 있고 무선랜 핑거프린트 수집이 가능한 건물이라면 어느 곳에도 적용 가능하다.
여러 글로벌 기업들이 실내 GPS를 실현하기 위해 전 세계 주요도시에서 수만 건의 실내 지도를 수집했다. 실내 지도와 함께 신호 지도 수집도 시도했지만 높은 정확도를 갖지 못했고 그 결과 실내에서의 위치 인식 서비스 질이 떨어진다.
연구팀은 문제 해결을 위해 실내를 이동 공간과 체류 공간으로 구분하고 각각의 공간에 최적화된 수집 위치 라벨링을 자동화하는 기술을 개발했다.
연구팀이 개발한 기술은 복도, 로비, 계단과 같은 이동 공간에서도 수집된 신호의 위치정보를 별도의 외부 정도 없이도 자동으로 라벨링하는 새로운 자율학습(Unsupervised Learning) 인공지능 기술이다.
이 기술을 토대로 기초실험연구동(N5)과 김병호-김삼열IT융합빌딩(N1)에서 실험을 실시했고, 충분한 양의 학습 데이터가 주어진다는 가정 하에 오차범위 3~4미터 수준의 정확도를 보였다.
이는 수작업을 통해 수집 위치를 라벨링한 결과와 비슷한 정확도로 연구팀이 함께 개발한 지자기 신호, 3축 가속기, 자이로스코프 기반의 딥러닝을 활용한 새로운 센서 퓨전 기법을 통하면 정확도가 더욱 상승하는 결과를 보였다.
그 동안 스마트폰을 통해 수집된 핑거프린트는 활용되지 못하고 버려졌지만 개발된 기술을 통해 무선랜 핑거프린트 빅데이터 영역이 새롭게 열릴 것으로 기대된다.
개발된 GPS 구축 기술은 글로벌 기업이나 국내 위치정보 서비스 기업 등이 전국 범위에서 위치정보 서비스를 제공할 때 도입해 효과적으로 사용할 수 있을 것으로 예상된다.
GPS 신호가 도달하지 않는 실내 환경에서 위치인식 정확도가 높아짐에 따라 포켓몬고 등의 O2O(online to offline) 위치기반 게임도 실내에서 실행 가능할 것으로 기대된다.
또한 다양한 위치기반 SNS, 사물인터넷 등 서비스가 활성화되고 위급한 상황에서 112나 119에 구조요청을 할 시 정확한 위치 파악이 가능할 것으로 보인다.
한 교수는 “개발된 글로벌 실내 위치인식 시스템 구축 기술을 KAIST 실내 위치인식 시스템인 카이로스(KAILOS)에 탑재해 서비스 할 예정이다”며 “전 세계 어느 건물에서든 정확도 높은 실내 위치인식 시스템을 손쉽게 구축할 수 있고 장래에 대부분 실내 공간에서도 위치인식 서비스가 제공 가능할 것이다”고 말했다.
카이로스는 2014년 KAIST에서 출시한 개방형 실내 위치인식 서비스 플랫폼이다. 자신이 원하는 건물의 실내지도를 카이로스에 등록하고 해당 건물의 핑거프린트를 수집해 실내 위치인식 시스템을 구축하도록 지원 중이다.
□ 그림 설명
그림1. 핑거프린트를 수집하여 신호지도를 구축한 뒤, 구축된 신호지도를 기반으로 위치를 추정하는 과정
그림2. KAILOS가 여러 가지 신호와 센서를 복합적으로 사용하였을 때 예상되는 정확도
2017.04.12
조회수 12537
-
 지능형 로봇 및 시스템 분야 학술대회 IROS 2016 폐막
〈 IROS 2016이 열린 행사장 〉
우리 대학 주도로 진행된 지능형 로봇 및 시스템 분야 최대 국제학술대회 'IROS 2016(IEEE/RSJ International Conference on Intelligent Robots and Systems)'가 성황리에 막을 내렸다.
대전컨벤션센터에서 10월 9일부터 6일간 열린 이번 학회는 기계공학과 권동수 교수가 프로그램 위원장을 맡고 기계공학과 김경수 교수, 전기 및 전자공학과 권인소 교수, 항공우주공학과 심현철 교수가 조직위원으로 활동해 학회 구성 및 운영에 기여했다.
〈 위원장을 역임한 권동수 교수 〉
IROS2016은 인공지능, 자율주행, 메디컬 로봇 등 다양한 분야의 연구에 대한 포럼, 간담회, 키노트, 구두 및 포스터 발표를 포함한 학술적 프로그램이 진행됐다.
행사 첫날인 9일(일)은 사전 행사로 IROS 자문 및 상임위원회 임원들 간 미팅이 이뤄졌으며, 경진대회 참가자들이 현장 분위기를 익혔다.
공식 일정의 첫날인 10일(월)에는 각 분야별로 다양한 워크숍과 체험 세션이 열렸으며 저녁에는 이번 행사참석자들을 대상으로 주최 측의 공식 환영만찬이 제공됐다.
11일(화)에는 공식 개막식에 이어 각 주제별로 강연과 토크 세션이 본격적으로 진행됐다. 최근 로봇 학계의 뜨거운 이슈로 떠오르고 있는 인공지능, 자율주행 시스템, 매핑, 메디컬 로봇 등 핵심 테마에 관한 로봇과학자들의 발표가 각 분야별로 체계적으로 분리돼 진행됐다.
11일(화)~13일(목) 3일 동안 각 오전에 진행된 정식 토크에서는 인공지능 분야의 석학인 카네기멜론대학 마뉴엘라 벨로소(Manuela M. Veloso) 교수가 자율 지능 서비스 로봇에 관해 발표했고작년 다르파 로봇 대회의 프로젝트 매니저였던 TRI(Toyota Research Institute)의 길 프렛(Gill Pratt) 대표의 자율주행자동차의 도전 과제에 대한 발표, 현대자동차그룹의 임태원 중앙연구소장의 로봇과 자동차를 주제로 한 발표, 영국 임페리얼 컬리지런던의 양광종 교수의 인간 로봇간 상호작용의 하모니를 주제로 한 발표가 진행됐다.
이어 키노트 토크에서는 고려대 송재복 교수, 한양대 이병주 교수, 삼성전자 종합기술원 최정연 상무(VP), 독일 프라이부르크대학 볼프람 부어가르트(Wolfram Burgard) 교수, 미국 일리노이대 세스 허친슨(Seth Hutchinson) 교수, 우리 대학 권인소, 심현철 교수 등 18명의 전문가들이 참여해 관련 주제에 대해 발표했다.
12일(수) 저녁에는 대전엑스포시민광장에서 수준 높은 공연과 함께 만찬이 제공돼 학술대회의 주제인 로봇에 대한 토론을 이어나갔고, 14일(금)에는 신청자들(90명)에 한해 우리 대학 연구실(권동수 교수 연구실, 김진환 교수 연구실, 오준호 교수 연구실) 및 한국전자통신 연구원(ETRI), 한국기계연구원(KIMM)을 방문하는 테크니컬 투어도 진행됐다.
지능형 로봇 및 시스템 분야 학술대회 IROS 2016 폐막
〈 IROS 2016이 열린 행사장 〉
우리 대학 주도로 진행된 지능형 로봇 및 시스템 분야 최대 국제학술대회 'IROS 2016(IEEE/RSJ International Conference on Intelligent Robots and Systems)'가 성황리에 막을 내렸다.
대전컨벤션센터에서 10월 9일부터 6일간 열린 이번 학회는 기계공학과 권동수 교수가 프로그램 위원장을 맡고 기계공학과 김경수 교수, 전기 및 전자공학과 권인소 교수, 항공우주공학과 심현철 교수가 조직위원으로 활동해 학회 구성 및 운영에 기여했다.
〈 위원장을 역임한 권동수 교수 〉
IROS2016은 인공지능, 자율주행, 메디컬 로봇 등 다양한 분야의 연구에 대한 포럼, 간담회, 키노트, 구두 및 포스터 발표를 포함한 학술적 프로그램이 진행됐다.
행사 첫날인 9일(일)은 사전 행사로 IROS 자문 및 상임위원회 임원들 간 미팅이 이뤄졌으며, 경진대회 참가자들이 현장 분위기를 익혔다.
공식 일정의 첫날인 10일(월)에는 각 분야별로 다양한 워크숍과 체험 세션이 열렸으며 저녁에는 이번 행사참석자들을 대상으로 주최 측의 공식 환영만찬이 제공됐다.
11일(화)에는 공식 개막식에 이어 각 주제별로 강연과 토크 세션이 본격적으로 진행됐다. 최근 로봇 학계의 뜨거운 이슈로 떠오르고 있는 인공지능, 자율주행 시스템, 매핑, 메디컬 로봇 등 핵심 테마에 관한 로봇과학자들의 발표가 각 분야별로 체계적으로 분리돼 진행됐다.
11일(화)~13일(목) 3일 동안 각 오전에 진행된 정식 토크에서는 인공지능 분야의 석학인 카네기멜론대학 마뉴엘라 벨로소(Manuela M. Veloso) 교수가 자율 지능 서비스 로봇에 관해 발표했고작년 다르파 로봇 대회의 프로젝트 매니저였던 TRI(Toyota Research Institute)의 길 프렛(Gill Pratt) 대표의 자율주행자동차의 도전 과제에 대한 발표, 현대자동차그룹의 임태원 중앙연구소장의 로봇과 자동차를 주제로 한 발표, 영국 임페리얼 컬리지런던의 양광종 교수의 인간 로봇간 상호작용의 하모니를 주제로 한 발표가 진행됐다.
이어 키노트 토크에서는 고려대 송재복 교수, 한양대 이병주 교수, 삼성전자 종합기술원 최정연 상무(VP), 독일 프라이부르크대학 볼프람 부어가르트(Wolfram Burgard) 교수, 미국 일리노이대 세스 허친슨(Seth Hutchinson) 교수, 우리 대학 권인소, 심현철 교수 등 18명의 전문가들이 참여해 관련 주제에 대해 발표했다.
12일(수) 저녁에는 대전엑스포시민광장에서 수준 높은 공연과 함께 만찬이 제공돼 학술대회의 주제인 로봇에 대한 토론을 이어나갔고, 14일(금)에는 신청자들(90명)에 한해 우리 대학 연구실(권동수 교수 연구실, 김진환 교수 연구실, 오준호 교수 연구실) 및 한국전자통신 연구원(ETRI), 한국기계연구원(KIMM)을 방문하는 테크니컬 투어도 진행됐다.
2016.10.31
조회수 13935
-
 KAIST 교수들, 하계 다보스포럼서 ‘맹활약’
KAIST가 오는 26-28일 중국 텐진에서 열리는 ‘2016 세계경제포럼(WEF) 하계대회(이하 하계 다보스포럼)’에 초청받아 다양한 세션을 운영한다.
‘제4차 산업혁명과 그 변혁적 영향’을 주제로 열리는 이번 포럼에서는 지난 1월 다보스포럼에서 주제로 삼았던‘제4차 산업혁명’을 보다 심도 있게 다룰 예정이다.
‘제4차 산업혁명’은 디지털 ․ 물리학 ․ 생물학 등 학문 간 경계가 무너지고 다양한 기술이 융합되는 기술혁명을 말한다. 인류가 지금까지 누려왔던 생활방식 ․ 일하는 방식 ․ 놀이문화에 근본적 변화가 예상된다.
KAIST는 이번 포럼에 이상엽 특훈교수, 심현철 교수, 김종환 교수 등이 참여해 다양한 세션을 운영한다.
매년 하계 다보스포럼에 전문가로 초청받아 온 이상엽 특훈교수는 올해도 맹 활약을 펼친다.
이 교수는 27일 ‘인터넷으로 약을 프린트 하는 시대가 오면’세션에서 클레어 매터슨(Clare Matterson) 영국 웰컴트러스트 전략소장, 니타 파라하니(Nita Farahany) 미국 듀크대 교수와 토론을 펼친다.이 교수는 대사공학으로 의약품을 만드는 기술이 3D 프린팅 기술과 연결되어 집에서 약을 프린트하는 시대가 오면 어떤 일이 벌어질 것인가에 대한 흥미로운 이야기를 들려줄 예정이다.
이 교수는 또 ‘전문가 리셉션(Expert reception)'에 참여해 ‘하계 다보스포럼과 아시아의 과학기술’을 주제로, 이노베이션 허브 세션에 참여해 ‘4차 산업혁명 시대를 살아가는데 필수적인 능력 향상을 위한 평생교육’을 주제로 발표와 토론을 진행한다.
이와 함께 KAIST는 ‘딥러닝에서 자율기계까지’를 주제로 휴머노이드 로봇 세션도 운영한다. 이상엽 교수가 세션 주관자로 나와 국내 드론 분야 석학인 심현철 항공우주공학과 교수, 로봇축구의 아버지 김종환 전기및전자공학부 교수와 함께 관련 분야 최신 트렌드에 대한 발표와 시연행사를 연다.
특히 심 교수는 이번 세션에서 사람을 대신해 비행기를 조종하는 로봇인 ‘파이봇(PIBOT․ 파일럿과 로봇의 합성어)’의 개발현황을 소개하고 시연행사도 진행 할 예정이다. 파이봇은 조종사의 역할을 대신해서 비행기의 엔진을 직접 켜고 비행을 한 후 착륙까지 할 수 있는 로봇이다.
[사진설명] 하계 다보스포럼에 참가한 심현철 교수가 비행기를 조종하는 로봇 '파이봇'에 대해 설명하고 있다.
이밖에 올해 세계경제포럼의 ‘젊은 과학자’로 선정된 김아영 건설및환경공학과 교수와 지난해 선정된 이승희 생명과학과 교수도 다양한 세션에 참여한다.
KAIST는 이번 포럼에서 전 세계 지도자들을 대상으로 KAIST의 첨단 연구성과를 알리고, 인재양성과 세계적 빅 이슈에 대한 다양한 해법에 관하여 발표할 계획이다.
강성모 총장은 “KAIST는 2011년부터 다보스포럼에 참석해 다양한 의제를 발표하고 연구성과를 소개함으로써 전 세계 과학기술 이슈를 주도해 왔다”며 “이번 포럼에서는 사람대신 비행기를 조종하는 파이봇 시연 등 KAIST의 첨단기술을 전 세계 지도자들에게 소개 할 것”이라고 말했다. 끝.
[사진설명] 심현철 항공우주공학과 교수가 개발중인 '파이봇(PIBOT)'
[사진설명] 파이봇 설명을 듣기위해 찾아온 관람객들
KAIST 교수들, 하계 다보스포럼서 ‘맹활약’
KAIST가 오는 26-28일 중국 텐진에서 열리는 ‘2016 세계경제포럼(WEF) 하계대회(이하 하계 다보스포럼)’에 초청받아 다양한 세션을 운영한다.
‘제4차 산업혁명과 그 변혁적 영향’을 주제로 열리는 이번 포럼에서는 지난 1월 다보스포럼에서 주제로 삼았던‘제4차 산업혁명’을 보다 심도 있게 다룰 예정이다.
‘제4차 산업혁명’은 디지털 ․ 물리학 ․ 생물학 등 학문 간 경계가 무너지고 다양한 기술이 융합되는 기술혁명을 말한다. 인류가 지금까지 누려왔던 생활방식 ․ 일하는 방식 ․ 놀이문화에 근본적 변화가 예상된다.
KAIST는 이번 포럼에 이상엽 특훈교수, 심현철 교수, 김종환 교수 등이 참여해 다양한 세션을 운영한다.
매년 하계 다보스포럼에 전문가로 초청받아 온 이상엽 특훈교수는 올해도 맹 활약을 펼친다.
이 교수는 27일 ‘인터넷으로 약을 프린트 하는 시대가 오면’세션에서 클레어 매터슨(Clare Matterson) 영국 웰컴트러스트 전략소장, 니타 파라하니(Nita Farahany) 미국 듀크대 교수와 토론을 펼친다.이 교수는 대사공학으로 의약품을 만드는 기술이 3D 프린팅 기술과 연결되어 집에서 약을 프린트하는 시대가 오면 어떤 일이 벌어질 것인가에 대한 흥미로운 이야기를 들려줄 예정이다.
이 교수는 또 ‘전문가 리셉션(Expert reception)'에 참여해 ‘하계 다보스포럼과 아시아의 과학기술’을 주제로, 이노베이션 허브 세션에 참여해 ‘4차 산업혁명 시대를 살아가는데 필수적인 능력 향상을 위한 평생교육’을 주제로 발표와 토론을 진행한다.
이와 함께 KAIST는 ‘딥러닝에서 자율기계까지’를 주제로 휴머노이드 로봇 세션도 운영한다. 이상엽 교수가 세션 주관자로 나와 국내 드론 분야 석학인 심현철 항공우주공학과 교수, 로봇축구의 아버지 김종환 전기및전자공학부 교수와 함께 관련 분야 최신 트렌드에 대한 발표와 시연행사를 연다.
특히 심 교수는 이번 세션에서 사람을 대신해 비행기를 조종하는 로봇인 ‘파이봇(PIBOT․ 파일럿과 로봇의 합성어)’의 개발현황을 소개하고 시연행사도 진행 할 예정이다. 파이봇은 조종사의 역할을 대신해서 비행기의 엔진을 직접 켜고 비행을 한 후 착륙까지 할 수 있는 로봇이다.
[사진설명] 하계 다보스포럼에 참가한 심현철 교수가 비행기를 조종하는 로봇 '파이봇'에 대해 설명하고 있다.
이밖에 올해 세계경제포럼의 ‘젊은 과학자’로 선정된 김아영 건설및환경공학과 교수와 지난해 선정된 이승희 생명과학과 교수도 다양한 세션에 참여한다.
KAIST는 이번 포럼에서 전 세계 지도자들을 대상으로 KAIST의 첨단 연구성과를 알리고, 인재양성과 세계적 빅 이슈에 대한 다양한 해법에 관하여 발표할 계획이다.
강성모 총장은 “KAIST는 2011년부터 다보스포럼에 참석해 다양한 의제를 발표하고 연구성과를 소개함으로써 전 세계 과학기술 이슈를 주도해 왔다”며 “이번 포럼에서는 사람대신 비행기를 조종하는 파이봇 시연 등 KAIST의 첨단기술을 전 세계 지도자들에게 소개 할 것”이라고 말했다. 끝.
[사진설명] 심현철 항공우주공학과 교수가 개발중인 '파이봇(PIBOT)'
[사진설명] 파이봇 설명을 듣기위해 찾아온 관람객들
2016.06.27
조회수 11437
-
 KAIST, 제1회 국제 자율무인선 대회서 준우승 차지
KAIST가 개발한 무인선박이 처음열린 국제대회에서 2위에 올랐다.
우리 학교 해양시스템공학전공 김진환 교수팀은 지난 10월 20~26일 싱가포르 마리나 베이(Marina Bay)에서 개최된 ‘제1회 국제 무인선박 경진대회’에서 미국 MIT에 이어 준우승을 차지했다.
무인자동차, 무인항공기와 더불어 해양 분야에서도 무인선박의 필요성이 점점 높아짐에 따라 이 분야 기술을 점검하고 육성하기 위해 미국 해군 연구개발국(ONR, Official of Naval Research)은 자율무인선 경진대회를 2년마다 개최하기로 했으며 올해 처음으로 열렸다.
한국, 미국, 호주, 일본, 싱가포르 등 환태평양 5개국에서 자국 내 선발을 거쳐 나라 별로 3개 팀씩 총 15개 팀이 참가한 본선에서는 MIT, 동경대, 동경공대, 싱가포르국립대, 난양공대, 호주 퀸즈랜드 공대 등 각국을 대표하는 학교들이 대거 출전했다. 우리나라에서는 KAIST외에도 서울대와 울산대가 참가했다.
이번 대회는 주최 측에서 제공한 길이 4.5m, 폭 2.5m의 무인선 플랫폼을 가지고 추진 시스템, 하드웨어, 자율 알고리즘 소프트웨어의 통합 시스템을 팀별로 구현해 △항로인식운항 △수중음원탐색 △부두자동접안 △부표원격관측 △수상장애물 인식 및 회피 등 총 5개 과제를 사용자의 조작 없이 자율적으로 수행하는 방식으로 진행됐다.
KAIST는 전체 15개 팀 가운데 6개 팀만을 뽑는 최종 결선진출자 결정전에서 홈팀인 싱가포르국립대에 이어 2위를 차지하며 3위의 MIT에 앞서 결승에 진출했으나 마지막 날 열린 결승에서 MIT에 우승을 내주며 준우승을 차지했다.
KAIST팀은 2등상 외에도 베스트 웹사이트 상과 후원사인 미국 방산 업체인 노스럽그루먼(Northrop Grumman)사의 특별상까지 총 1만 6천 5백불의 상금을 수상했다.
박승빈 대외부총장은 “세계적 수준에 올라와있는 우리나라의 무인로봇기술을 전 세계에 알리는 계기가 됐다”며 “세계적인 대회에서 좋은 성적을 거둬 글로벌 명문 연구중심대학으로 발돋움하고 있는 KAIST의 국제적 인지도와 위상을 드높였다”고 수상 의의를 밝혔다.
김진환 교수는 “최근 들어 무인기나 무인자동차와 함께 해양 분야에서도 무인선박, 무인잠수정과 같은 무인 시스템기술의 필요성이 높아지고 있다”며 “무인선 기술을 이용하면 앞으로 수로조사, 해양탐사, 영해 감시 및 정찰, 불법어업단속 등을 보다 효과적이고 안전하게 수행하는데 커다란 도움이 될 것”이라고 말했다.
한편, 김 교수는 이번 대회 후원기관인 미해군연구개발국의 지원 외에도 삼성중공업, 소나테크, 대양전기공업, 레드원테크놀러지 등 국내 기업 후원을 받아 참가했다.
대회 공식 사이트 : www.robotx.org KAIST팀 홈페이지 robotxangrynerds.blogspot.com
▣ KAIST팀 무인선
▣ 대회장면
▣ 미션
미션의 주요 목표: 부표를 경계로 한 항로를 인식하여 자율 운항을 통해 출구를 통과
미션 특징: 반드시 통과해야만 다음 임무 수행 가능.
미션 전략:
1. 라이다를 이용하여 입구 부표 및 출구 부표를 탐지하고 그 위치를 결정 2. 결정된 부표들의 위치를 기반으로 일련의 경유점들을 생성하고 이들을 추종함으로써 자율 운항 임무 수행.
미션의 주요 목표: 수중음원의 3차원 위치(x,y,z)를 탐색하여 심판에게 보고함.
미션 특징:
1. 가장 큰 배점이 할당됨.
2. 4개의 음원 중, 임의의 한 음원만 음파를 송신
3. 심판에게 보고된 음원의 추정위치가 실제 위치와 가까울수록 높은 점수를 획득
미션 전략:
1. 예상되는 수중 음원의 위치 근방으로 이동 후, 정지 2. 일정시간동안 청음 후, 추정된 음원의 위치로 다시 이동하여 청음 및 측위 과정을 반복함으로써 추정오류를 최소화 함.
미션의 주요 목표: 각 부두에 할당된 표식을 탐지하고, 목표 부두에 접안
미션 특징: 세 가지 다른 표식(십자가, 삼각형, 원)들을 서로 구분하고, 매일 다르게 공지되는 표식의 위치에 해당하는 부두에 정확히 접안해야 함.
미션 전략:
1. 세 가지 표식이 모두 보이는 위치로 이동 후, 영상처리 알고리즘을 통해 목표 표식을 탐지.
2. 추적 알고리즘의 적용을 통해 연속적인 표식의 위치 추정 3. 주 추진기 및 선수부 추진기를 이용한 횡방향 이동을 통해 목표 부두로 정확히 접안
미션의 주요 목표: 임의의 위치에 있는 발광 부유체를 인식하고 부유체가 발하는 색상의 순서를 인식하여 보고함.
미션 특징: 부유체에서는 세 가지 색상(빨강, 초록, 파랑)이 임의의 순서로 발광됨. 무인선이 발광 부유체에 충돌하였을 때, 해당 시도는 실격처리 됨.
미션 전략:
1. 라이다를 기반으로 임의의 위치에 있는 발광 부유체를 찾기 위해 사전 정의된 일련의 경유점을 따라 이동하며 그 위치를 탐색한다.
2. 발광 부유체의 위치 결정 후, 반경 10m의 위치에서 선수각/거리/위치 제어를 수행 3. 영상처리를 통한 색상 인식 및 발광 순서인식 알고리즘 적용
미션의 주요 목표: 지정된 입구로 진입 후 임의의 위치에 있는 장애물을 회피하여 지정된 출구를 통과
미션 특징: 입구, 출구 각각 3개의 구역 중, 매일 다르게 지정된 입구와 출구를 통과하여야 함. 무인선이 장애물과 충돌한 횟수에 따라 감점이 적용됨.
미션 전략:
1. 적절한 탐지 위치에서, 라이다를 이용하여 입구를 구성하는 부표를 탐지하고 그 위치를 결정
2. 결정된 부표들의 위치들을 기반으로 진입을 위한 경유점 생성
3. 라이다를 기반으로 장애물을 인식하고 인식 정보를 이용하여 경로계획 및 회피 알고리즘 적용 4. 입구 진입과 동일한 방법으로 출구 인식 및 통과
KAIST, 제1회 국제 자율무인선 대회서 준우승 차지
KAIST가 개발한 무인선박이 처음열린 국제대회에서 2위에 올랐다.
우리 학교 해양시스템공학전공 김진환 교수팀은 지난 10월 20~26일 싱가포르 마리나 베이(Marina Bay)에서 개최된 ‘제1회 국제 무인선박 경진대회’에서 미국 MIT에 이어 준우승을 차지했다.
무인자동차, 무인항공기와 더불어 해양 분야에서도 무인선박의 필요성이 점점 높아짐에 따라 이 분야 기술을 점검하고 육성하기 위해 미국 해군 연구개발국(ONR, Official of Naval Research)은 자율무인선 경진대회를 2년마다 개최하기로 했으며 올해 처음으로 열렸다.
한국, 미국, 호주, 일본, 싱가포르 등 환태평양 5개국에서 자국 내 선발을 거쳐 나라 별로 3개 팀씩 총 15개 팀이 참가한 본선에서는 MIT, 동경대, 동경공대, 싱가포르국립대, 난양공대, 호주 퀸즈랜드 공대 등 각국을 대표하는 학교들이 대거 출전했다. 우리나라에서는 KAIST외에도 서울대와 울산대가 참가했다.
이번 대회는 주최 측에서 제공한 길이 4.5m, 폭 2.5m의 무인선 플랫폼을 가지고 추진 시스템, 하드웨어, 자율 알고리즘 소프트웨어의 통합 시스템을 팀별로 구현해 △항로인식운항 △수중음원탐색 △부두자동접안 △부표원격관측 △수상장애물 인식 및 회피 등 총 5개 과제를 사용자의 조작 없이 자율적으로 수행하는 방식으로 진행됐다.
KAIST는 전체 15개 팀 가운데 6개 팀만을 뽑는 최종 결선진출자 결정전에서 홈팀인 싱가포르국립대에 이어 2위를 차지하며 3위의 MIT에 앞서 결승에 진출했으나 마지막 날 열린 결승에서 MIT에 우승을 내주며 준우승을 차지했다.
KAIST팀은 2등상 외에도 베스트 웹사이트 상과 후원사인 미국 방산 업체인 노스럽그루먼(Northrop Grumman)사의 특별상까지 총 1만 6천 5백불의 상금을 수상했다.
박승빈 대외부총장은 “세계적 수준에 올라와있는 우리나라의 무인로봇기술을 전 세계에 알리는 계기가 됐다”며 “세계적인 대회에서 좋은 성적을 거둬 글로벌 명문 연구중심대학으로 발돋움하고 있는 KAIST의 국제적 인지도와 위상을 드높였다”고 수상 의의를 밝혔다.
김진환 교수는 “최근 들어 무인기나 무인자동차와 함께 해양 분야에서도 무인선박, 무인잠수정과 같은 무인 시스템기술의 필요성이 높아지고 있다”며 “무인선 기술을 이용하면 앞으로 수로조사, 해양탐사, 영해 감시 및 정찰, 불법어업단속 등을 보다 효과적이고 안전하게 수행하는데 커다란 도움이 될 것”이라고 말했다.
한편, 김 교수는 이번 대회 후원기관인 미해군연구개발국의 지원 외에도 삼성중공업, 소나테크, 대양전기공업, 레드원테크놀러지 등 국내 기업 후원을 받아 참가했다.
대회 공식 사이트 : www.robotx.org KAIST팀 홈페이지 robotxangrynerds.blogspot.com
▣ KAIST팀 무인선
▣ 대회장면
▣ 미션
미션의 주요 목표: 부표를 경계로 한 항로를 인식하여 자율 운항을 통해 출구를 통과
미션 특징: 반드시 통과해야만 다음 임무 수행 가능.
미션 전략:
1. 라이다를 이용하여 입구 부표 및 출구 부표를 탐지하고 그 위치를 결정 2. 결정된 부표들의 위치를 기반으로 일련의 경유점들을 생성하고 이들을 추종함으로써 자율 운항 임무 수행.
미션의 주요 목표: 수중음원의 3차원 위치(x,y,z)를 탐색하여 심판에게 보고함.
미션 특징:
1. 가장 큰 배점이 할당됨.
2. 4개의 음원 중, 임의의 한 음원만 음파를 송신
3. 심판에게 보고된 음원의 추정위치가 실제 위치와 가까울수록 높은 점수를 획득
미션 전략:
1. 예상되는 수중 음원의 위치 근방으로 이동 후, 정지 2. 일정시간동안 청음 후, 추정된 음원의 위치로 다시 이동하여 청음 및 측위 과정을 반복함으로써 추정오류를 최소화 함.
미션의 주요 목표: 각 부두에 할당된 표식을 탐지하고, 목표 부두에 접안
미션 특징: 세 가지 다른 표식(십자가, 삼각형, 원)들을 서로 구분하고, 매일 다르게 공지되는 표식의 위치에 해당하는 부두에 정확히 접안해야 함.
미션 전략:
1. 세 가지 표식이 모두 보이는 위치로 이동 후, 영상처리 알고리즘을 통해 목표 표식을 탐지.
2. 추적 알고리즘의 적용을 통해 연속적인 표식의 위치 추정 3. 주 추진기 및 선수부 추진기를 이용한 횡방향 이동을 통해 목표 부두로 정확히 접안
미션의 주요 목표: 임의의 위치에 있는 발광 부유체를 인식하고 부유체가 발하는 색상의 순서를 인식하여 보고함.
미션 특징: 부유체에서는 세 가지 색상(빨강, 초록, 파랑)이 임의의 순서로 발광됨. 무인선이 발광 부유체에 충돌하였을 때, 해당 시도는 실격처리 됨.
미션 전략:
1. 라이다를 기반으로 임의의 위치에 있는 발광 부유체를 찾기 위해 사전 정의된 일련의 경유점을 따라 이동하며 그 위치를 탐색한다.
2. 발광 부유체의 위치 결정 후, 반경 10m의 위치에서 선수각/거리/위치 제어를 수행 3. 영상처리를 통한 색상 인식 및 발광 순서인식 알고리즘 적용
미션의 주요 목표: 지정된 입구로 진입 후 임의의 위치에 있는 장애물을 회피하여 지정된 출구를 통과
미션 특징: 입구, 출구 각각 3개의 구역 중, 매일 다르게 지정된 입구와 출구를 통과하여야 함. 무인선이 장애물과 충돌한 횟수에 따라 감점이 적용됨.
미션 전략:
1. 적절한 탐지 위치에서, 라이다를 이용하여 입구를 구성하는 부표를 탐지하고 그 위치를 결정
2. 결정된 부표들의 위치들을 기반으로 진입을 위한 경유점 생성
3. 라이다를 기반으로 장애물을 인식하고 인식 정보를 이용하여 경로계획 및 회피 알고리즘 적용 4. 입구 진입과 동일한 방법으로 출구 인식 및 통과
2014.12.05
조회수 14745