system
-
 Professor Minsoo Rhu Recognized as Facebook Research Scholar
Professor Minsoo Rhu from the School of Electrical Engineering was selected as the recipient of the Systems for Machine Learning Research Awards presented by Facebook.
Facebook launched the award last year with the goal of funding impactful solutions in the areas of developer tookits, compilers and code generation, system architecture, memory technologies, and machine learning accelerator support.
A total of 167 scholars from 100 universities representing 26 countries submitted research proposals, and Facebook selected final 10 scholars. Professor Rhu made the list with his research topic ‘A Near-Memory Processing Architecture for Training Recommendation Systems.’ He will receive 5,000 USD in research funds at the award ceremony which will take place during this year’s AI Systems Faculty Summit at the Facebook headquarters in Menlo Park, California.
Professor Rhu’s submission was based on research on ‘Memory-Centric Deep Learning System Architecture’ that he carried out for three years under the auspices of Samsung Science and Technology Foundation from 2017. It was an academic-industrial cooperation research project in which leading domestic companies like Samsung Electronics and SK Hynix collaborated to make a foray into the global memory-centric smart system semiconductor market.
Professor Rhu who joined KAIST in 2018 has led various systems research projects to accelerate the AI computing technology while working at NVIDIA headquarters from 2014.
(END)
2020.02.21 View 7794
Professor Minsoo Rhu Recognized as Facebook Research Scholar
Professor Minsoo Rhu from the School of Electrical Engineering was selected as the recipient of the Systems for Machine Learning Research Awards presented by Facebook.
Facebook launched the award last year with the goal of funding impactful solutions in the areas of developer tookits, compilers and code generation, system architecture, memory technologies, and machine learning accelerator support.
A total of 167 scholars from 100 universities representing 26 countries submitted research proposals, and Facebook selected final 10 scholars. Professor Rhu made the list with his research topic ‘A Near-Memory Processing Architecture for Training Recommendation Systems.’ He will receive 5,000 USD in research funds at the award ceremony which will take place during this year’s AI Systems Faculty Summit at the Facebook headquarters in Menlo Park, California.
Professor Rhu’s submission was based on research on ‘Memory-Centric Deep Learning System Architecture’ that he carried out for three years under the auspices of Samsung Science and Technology Foundation from 2017. It was an academic-industrial cooperation research project in which leading domestic companies like Samsung Electronics and SK Hynix collaborated to make a foray into the global memory-centric smart system semiconductor market.
Professor Rhu who joined KAIST in 2018 has led various systems research projects to accelerate the AI computing technology while working at NVIDIA headquarters from 2014.
(END)
2020.02.21 View 7794 -
 What Fuels a “Domino Effect” in Cancer Drug Resistance?
KAIST researchers have identified mechanisms that relay prior acquired resistance to the first-line chemotherapy to the second-line targeted therapy, fueling a “domino effect” in cancer drug resistance. Their study featured in the February 7 edition of Science Advances suggests a new strategy for improving the second-line setting of cancer treatment for patients who showed resistance to anti-cancer drugs.
Resistance to cancer drugs is often managed in the clinic by chemotherapy and targeted therapy. Unlike chemotherapy that works by repressing fast-proliferating cells, targeted therapy blocks a single oncogenic pathway to halt tumor growth. In many cases, targeted therapy is engaged as a maintenance therapy or employed in the second-line after front-line chemotherapy.
A team of researchers led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering and the KAIST Institute for Health Science and Technology (KIHST) has discovered an unexpected resistance signature that occurs between chemotherapy and targeted therapy. The team further identified a set of integrated mechanisms that promotes this kind of sequential therapy resistance.
“There have been multiple clinical accounts reflecting that targeted therapies tend to be least successful in patients who have exhausted all standard treatments,” said the first author of the paper Mark Borris D. Aldonza. He continued, “These accounts ignited our hypothesis that failed responses to some chemotherapies might speed up the evolution of resistance to other drugs, particularly those with specific targets.”
Aldonza and his colleagues extracted large amounts of drug-resistance information from the open-source database the Genomics of Drug Sensitivity in Cancer (GDSC), which contains thousands of drug response data entries from various human cancer cell lines. Their big data analysis revealed that cancer cell lines resistant to chemotherapies classified as anti-mitotic drugs (AMDs), toxins that inhibit overacting cell division, are also resistant to a class of targeted therapies called epidermal growth factor receptor-tyrosine kinase inhibitors (EGFR-TKIs).
In all of the cancer types analyzed, more than 84 percent of those resistant to AMDs, representatively ‘paclitaxel’, were also resistant to at least nine EGFR-TKIs. In lung, pancreatic, and breast cancers where paclitaxel is often used as a first-line, standard-of-care regimen, greater than 92 percent showed resistance to EGFR-TKIs. Professor Kim said, “It is surprising to see that such collateral resistance can occur specifically between two chemically different classes of drugs.”
To figure out how failed responses to paclitaxel leads to resistance to EGFR-TKIs, the team validated co-resistance signatures that they found in the database by generating and analyzing a subset of slow-doubling, paclitaxel-resistant cancer models called ‘persisters’.
The results demonstrated that paclitaxel-resistant cancers remodel their stress response by first becoming more stem cell-like, evolving the ability to self-renew to adapt to more stressful conditions like drug exposures. More surprisingly, when the researchers characterized the metabolic state of the cells, EGFR-TKI persisters derived from paclitaxel-resistant cancer cells showed high dependencies to energy-producing processes such as glycolysis and glutaminolysis.
“We found that, without an energy stimulus like glucose, these cells transform to becoming more senescent, a characteristic of cells that have arrested cell division. However, this senescence is controlled by stem cell factors, which the paclitaxel-resistant cancers use to escape from this arrested state given a favorable condition to re-grow,” said Aldonza.
Professor Kim explained, “Before this research, there was no reason to expect that acquiring the cancer stem cell phenotype that dramatically leads to a cascade of changes in cellular states affecting metabolism and cell death is linked with drug-specific sequential resistance between two classes of therapies.”
He added, “The expansion of our work to other working models of drug resistance in a much more clinically-relevant setting, perhaps in clinical trials, will take on increasing importance, as sequential treatment strategies will continue to be adapted to various forms of anti-cancer therapy regimens.”
This study was supported by the Basic Science Research Program of the National Research Foundation of Korea (NRF-2016R1C1B2009886), and the KAIST Future Systems Healthcare Project (KAISTHEALTHCARE42) funded by the Korean Ministry of Science and ICT (MSIT). Undergraduate student Aldonza participated in this research project and presented the findings as the lead author as part of the Undergraduate Research Participation (URP) Program at KAIST.
< Figure 1. Schematic overview of the study. >
< Figure 2. Big data analysis revealing co-resistance signatures between classes of anti-cancer drugs. >
Publication:
Aldonza et al. (2020) Prior acquired resistance to paclitaxel relays diverse EGFR-targeted therapy persistence mechanisms. Science Advances, Vol. 6, No. 6, eaav7416. Available online at http://dx.doi.org/10.1126/sciadv.aav7416
Profile: Prof. Yoosik Kim, MA, PhD
ysyoosik@kaist.ac.kr
https://qcbio.kaist.ac.kr/
Assistant Professor
Bio Network Analysis Laboratory
Department of Chemical and Biomolecular Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr
Daejeon, Republic of Korea
Profile: Mark Borris D. Aldonza
borris@kaist.ac.kr
Undergraduate Student
Department of Biological Sciences
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr
Daejeon, Republic of Korea
(END)
2020.02.10 View 11500
What Fuels a “Domino Effect” in Cancer Drug Resistance?
KAIST researchers have identified mechanisms that relay prior acquired resistance to the first-line chemotherapy to the second-line targeted therapy, fueling a “domino effect” in cancer drug resistance. Their study featured in the February 7 edition of Science Advances suggests a new strategy for improving the second-line setting of cancer treatment for patients who showed resistance to anti-cancer drugs.
Resistance to cancer drugs is often managed in the clinic by chemotherapy and targeted therapy. Unlike chemotherapy that works by repressing fast-proliferating cells, targeted therapy blocks a single oncogenic pathway to halt tumor growth. In many cases, targeted therapy is engaged as a maintenance therapy or employed in the second-line after front-line chemotherapy.
A team of researchers led by Professor Yoosik Kim from the Department of Chemical and Biomolecular Engineering and the KAIST Institute for Health Science and Technology (KIHST) has discovered an unexpected resistance signature that occurs between chemotherapy and targeted therapy. The team further identified a set of integrated mechanisms that promotes this kind of sequential therapy resistance.
“There have been multiple clinical accounts reflecting that targeted therapies tend to be least successful in patients who have exhausted all standard treatments,” said the first author of the paper Mark Borris D. Aldonza. He continued, “These accounts ignited our hypothesis that failed responses to some chemotherapies might speed up the evolution of resistance to other drugs, particularly those with specific targets.”
Aldonza and his colleagues extracted large amounts of drug-resistance information from the open-source database the Genomics of Drug Sensitivity in Cancer (GDSC), which contains thousands of drug response data entries from various human cancer cell lines. Their big data analysis revealed that cancer cell lines resistant to chemotherapies classified as anti-mitotic drugs (AMDs), toxins that inhibit overacting cell division, are also resistant to a class of targeted therapies called epidermal growth factor receptor-tyrosine kinase inhibitors (EGFR-TKIs).
In all of the cancer types analyzed, more than 84 percent of those resistant to AMDs, representatively ‘paclitaxel’, were also resistant to at least nine EGFR-TKIs. In lung, pancreatic, and breast cancers where paclitaxel is often used as a first-line, standard-of-care regimen, greater than 92 percent showed resistance to EGFR-TKIs. Professor Kim said, “It is surprising to see that such collateral resistance can occur specifically between two chemically different classes of drugs.”
To figure out how failed responses to paclitaxel leads to resistance to EGFR-TKIs, the team validated co-resistance signatures that they found in the database by generating and analyzing a subset of slow-doubling, paclitaxel-resistant cancer models called ‘persisters’.
The results demonstrated that paclitaxel-resistant cancers remodel their stress response by first becoming more stem cell-like, evolving the ability to self-renew to adapt to more stressful conditions like drug exposures. More surprisingly, when the researchers characterized the metabolic state of the cells, EGFR-TKI persisters derived from paclitaxel-resistant cancer cells showed high dependencies to energy-producing processes such as glycolysis and glutaminolysis.
“We found that, without an energy stimulus like glucose, these cells transform to becoming more senescent, a characteristic of cells that have arrested cell division. However, this senescence is controlled by stem cell factors, which the paclitaxel-resistant cancers use to escape from this arrested state given a favorable condition to re-grow,” said Aldonza.
Professor Kim explained, “Before this research, there was no reason to expect that acquiring the cancer stem cell phenotype that dramatically leads to a cascade of changes in cellular states affecting metabolism and cell death is linked with drug-specific sequential resistance between two classes of therapies.”
He added, “The expansion of our work to other working models of drug resistance in a much more clinically-relevant setting, perhaps in clinical trials, will take on increasing importance, as sequential treatment strategies will continue to be adapted to various forms of anti-cancer therapy regimens.”
This study was supported by the Basic Science Research Program of the National Research Foundation of Korea (NRF-2016R1C1B2009886), and the KAIST Future Systems Healthcare Project (KAISTHEALTHCARE42) funded by the Korean Ministry of Science and ICT (MSIT). Undergraduate student Aldonza participated in this research project and presented the findings as the lead author as part of the Undergraduate Research Participation (URP) Program at KAIST.
< Figure 1. Schematic overview of the study. >
< Figure 2. Big data analysis revealing co-resistance signatures between classes of anti-cancer drugs. >
Publication:
Aldonza et al. (2020) Prior acquired resistance to paclitaxel relays diverse EGFR-targeted therapy persistence mechanisms. Science Advances, Vol. 6, No. 6, eaav7416. Available online at http://dx.doi.org/10.1126/sciadv.aav7416
Profile: Prof. Yoosik Kim, MA, PhD
ysyoosik@kaist.ac.kr
https://qcbio.kaist.ac.kr/
Assistant Professor
Bio Network Analysis Laboratory
Department of Chemical and Biomolecular Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr
Daejeon, Republic of Korea
Profile: Mark Borris D. Aldonza
borris@kaist.ac.kr
Undergraduate Student
Department of Biological Sciences
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr
Daejeon, Republic of Korea
(END)
2020.02.10 View 11500 -
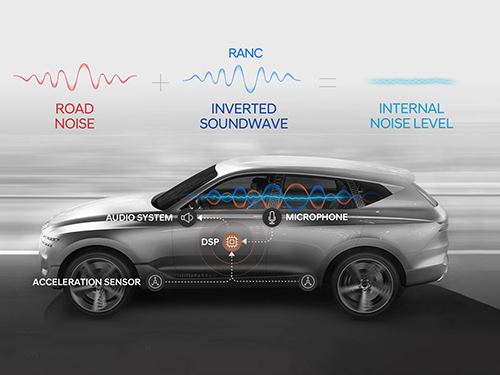 A System Controlling Road Active Noise to Hit the Road
The research team led by Professor Youngjin Park of the Department of Mechanical Engineering has developed a road noise active noise control (RANC) system to be commercialized in partnership with Hyundai Motor Group.
On December 11, Hyundai Motor Group announced the successful development of the RANC system, which significantly reduces the road noise flowing into cars. The carmaker has completed the domestic and American patent applications for the location of sensors and the signal selection method, the core technology of RANC.
RANC is a technology for reducing road noise during driving. This system consists of an acceleration sensor, digital signal processor (the control computer to analyze sound signals), microphone, amplifier, and audio system. To make the system as simple as possible, the audio system utilizes the original audio system embedded in the car instead of a separate system.
The acceleration sensor first calculates the vibration from the road into the car. The location of the sensor is important for accurately identifying the vibration path. The research team was able to find the optimal sensor location through a number of tests.
The System Dynamics and Applied Control Laboratory of Professor Park researched ways to significantly reduce road noise with Hyundai Motor Group for four years from 1993 as a G7 national project and published the results in international journals. In 2002, the researchers published an article titled “Noise Quietens Driving” in Nature, where they announced the first success in reducing road noise in actual cars. The achievement did not lead to commercialization, however, due to the lack of auxiliary technologies at the time, digital amplifiers and DSP for cars for example, and pricing issues.
Since 2013, Professor Park’s research team has participated in one technology transfer and eight university-industry projects. Based on these efforts, the team was able to successfully develop the RANC system with domestic technology in partnership with Hyundai’s NVH Research Lab (Research Fellow, Dr. Gangdeok Lee; Ph.D. in aviation engineering, 1996), Optomech (Founder, Professor Gyeongsu Kim; Ph.D. in mechanical engineering, 1999), ARE (CEO Hyeonseok Kim; Ph.D. in mechanical engineering, 1998), WeAcom, and BurnYoung.
Professor Park’s team led the project by performing theory-based research during the commercialization stage in collaboration with Hyundai Motor Group.
For the commercialization of the RANC system, Hyundai Motor Group is planning to collaborate with the global car audio company Harman to increase the degree of completion and apply the RANC system to the GV 80, the first SUV model of the Genesis brand.
“I am very delighted as an engineer to see the research I worked on from my early days at KAIST be commercialized after 20 years,” noted Professor Park. “I am thrilled to make a contribution to such commercialization with my students in my lab.”
2019.12.27 View 9651
A System Controlling Road Active Noise to Hit the Road
The research team led by Professor Youngjin Park of the Department of Mechanical Engineering has developed a road noise active noise control (RANC) system to be commercialized in partnership with Hyundai Motor Group.
On December 11, Hyundai Motor Group announced the successful development of the RANC system, which significantly reduces the road noise flowing into cars. The carmaker has completed the domestic and American patent applications for the location of sensors and the signal selection method, the core technology of RANC.
RANC is a technology for reducing road noise during driving. This system consists of an acceleration sensor, digital signal processor (the control computer to analyze sound signals), microphone, amplifier, and audio system. To make the system as simple as possible, the audio system utilizes the original audio system embedded in the car instead of a separate system.
The acceleration sensor first calculates the vibration from the road into the car. The location of the sensor is important for accurately identifying the vibration path. The research team was able to find the optimal sensor location through a number of tests.
The System Dynamics and Applied Control Laboratory of Professor Park researched ways to significantly reduce road noise with Hyundai Motor Group for four years from 1993 as a G7 national project and published the results in international journals. In 2002, the researchers published an article titled “Noise Quietens Driving” in Nature, where they announced the first success in reducing road noise in actual cars. The achievement did not lead to commercialization, however, due to the lack of auxiliary technologies at the time, digital amplifiers and DSP for cars for example, and pricing issues.
Since 2013, Professor Park’s research team has participated in one technology transfer and eight university-industry projects. Based on these efforts, the team was able to successfully develop the RANC system with domestic technology in partnership with Hyundai’s NVH Research Lab (Research Fellow, Dr. Gangdeok Lee; Ph.D. in aviation engineering, 1996), Optomech (Founder, Professor Gyeongsu Kim; Ph.D. in mechanical engineering, 1999), ARE (CEO Hyeonseok Kim; Ph.D. in mechanical engineering, 1998), WeAcom, and BurnYoung.
Professor Park’s team led the project by performing theory-based research during the commercialization stage in collaboration with Hyundai Motor Group.
For the commercialization of the RANC system, Hyundai Motor Group is planning to collaborate with the global car audio company Harman to increase the degree of completion and apply the RANC system to the GV 80, the first SUV model of the Genesis brand.
“I am very delighted as an engineer to see the research I worked on from my early days at KAIST be commercialized after 20 years,” noted Professor Park. “I am thrilled to make a contribution to such commercialization with my students in my lab.”
2019.12.27 View 9651 -
 Professor Junil Choi Receives Stephen O. Rice Prize
< Professor Junil Choi (second from the left) >
Professor Junil Choi from the School of Electrical Engineering received the Stephen O. Rice Prize at the Global Communications Conference (GLOBECOM) hosted by the Institute of Electrical and Electronics Engineers (IEEE) in Hawaii on December 10, 2019.
The Stephen O. Rice Prize is awarded to only one paper of exceptional merit every year. The IEEE Communications Society evaluates all papers published in the IEEE Transactions on Communications journal within the last three years, and marks each paper by aggregating its scores on originality, the number of citations, impact, and peer evaluation.
Professor Choi won the prize for his research on one-bit analog-to-digital converters (ADCs) for multiuser massive multiple-input and multiple-output (MIMO) antenna systems published in 2016. In his paper, Professor Choi proposed a technology that can drastically reduce the power consumption of the multiuser massive MIMO antenna systems, which are the core technology for 5G and future wireless communication. Professor Choi’s paper has been cited more than 230 times in various academic journals and conference papers since its publication, and multiple follow-up studies are actively ongoing.
In 2015, Professor Choi received the IEEE Signal Processing Society Best Paper Award, an award equals to the Stephen O. Rice Prize. He was also selected as the winner of the 15th Haedong Young Engineering Researcher Award presented by the Korean Institute of Communications and Information Sciences (KICS) on December 6, 2019 for his outstanding academic achievements, including 34 international journal publications and 26 US patent registrations.
(END)
2019.12.23 View 8933
Professor Junil Choi Receives Stephen O. Rice Prize
< Professor Junil Choi (second from the left) >
Professor Junil Choi from the School of Electrical Engineering received the Stephen O. Rice Prize at the Global Communications Conference (GLOBECOM) hosted by the Institute of Electrical and Electronics Engineers (IEEE) in Hawaii on December 10, 2019.
The Stephen O. Rice Prize is awarded to only one paper of exceptional merit every year. The IEEE Communications Society evaluates all papers published in the IEEE Transactions on Communications journal within the last three years, and marks each paper by aggregating its scores on originality, the number of citations, impact, and peer evaluation.
Professor Choi won the prize for his research on one-bit analog-to-digital converters (ADCs) for multiuser massive multiple-input and multiple-output (MIMO) antenna systems published in 2016. In his paper, Professor Choi proposed a technology that can drastically reduce the power consumption of the multiuser massive MIMO antenna systems, which are the core technology for 5G and future wireless communication. Professor Choi’s paper has been cited more than 230 times in various academic journals and conference papers since its publication, and multiple follow-up studies are actively ongoing.
In 2015, Professor Choi received the IEEE Signal Processing Society Best Paper Award, an award equals to the Stephen O. Rice Prize. He was also selected as the winner of the 15th Haedong Young Engineering Researcher Award presented by the Korean Institute of Communications and Information Sciences (KICS) on December 6, 2019 for his outstanding academic achievements, including 34 international journal publications and 26 US patent registrations.
(END)
2019.12.23 View 8933 -
 Two Professors Receive Awards from the Korea Robotics Society
< Professor Jee-Hwan Ryu and Professor Ayoung Kim >
The Korea Robotics Society (KROS) conferred awards onto two KAIST professors from the Department of Civil and Environmental Engineering in recognition of their achievements and contributions to the development of the robotics industry in 2019. Professor Jee-Hwan Ryu has been actively engaged in researching the field of teleoperation, and this led him to win the KROS Robotics Innovation (KRI) Award. The KRI Award was newly established in 2019 by the KROS, in order to encourage researchers who have made innovative achievements in robotics. Professor Ryu shared the honor of being the first winner of this award with Professor Jaeheung Park of Seoul National University. Professor Ayoung Kim, from the same department, received the Young Investigator Award presented to emerging robitics researchers under 40 years of age. (END)
2019.12.19 View 7698
Two Professors Receive Awards from the Korea Robotics Society
< Professor Jee-Hwan Ryu and Professor Ayoung Kim >
The Korea Robotics Society (KROS) conferred awards onto two KAIST professors from the Department of Civil and Environmental Engineering in recognition of their achievements and contributions to the development of the robotics industry in 2019. Professor Jee-Hwan Ryu has been actively engaged in researching the field of teleoperation, and this led him to win the KROS Robotics Innovation (KRI) Award. The KRI Award was newly established in 2019 by the KROS, in order to encourage researchers who have made innovative achievements in robotics. Professor Ryu shared the honor of being the first winner of this award with Professor Jaeheung Park of Seoul National University. Professor Ayoung Kim, from the same department, received the Young Investigator Award presented to emerging robitics researchers under 40 years of age. (END)
2019.12.19 View 7698 -
 KAIST and Google Jointly Develop AI Curricula
KAIST selected the two professors who will develop AI curriculum under the auspices of the KAIST-Google Partnership for AI Education and Research. The Graduate School of AI announced the two authors among the 20 applicants who will develop the curriculum next year. They will be provided 7,500 USD per subject.
Professor Changho Suh from the School of Electrical Engineering and Professor Yong-Jin Yoon from the Department of Mechanical Engineering will use Google technology such as TensorFlow, Google Cloud, and Android to create the curriculum.
Professor Suh’s “TensorFlow for Information Theory and Convex Optimization “will be used for curriculum in the graduate courses and Professor Yoon’s “AI Convergence Project Based Learning (PBL)” will be used for online courses. Professor Yoon’s course will explore and define problems by utilizing AI and experiencing the process of developing products that use AI through design thinking, which involves product design, production, and verification. Professor Suh’s course will discus“information theory and convergence,” which uses basic sciences and engineering as well as AI, machine learning, and deep learning.
2019.12.04 View 11127
KAIST and Google Jointly Develop AI Curricula
KAIST selected the two professors who will develop AI curriculum under the auspices of the KAIST-Google Partnership for AI Education and Research. The Graduate School of AI announced the two authors among the 20 applicants who will develop the curriculum next year. They will be provided 7,500 USD per subject.
Professor Changho Suh from the School of Electrical Engineering and Professor Yong-Jin Yoon from the Department of Mechanical Engineering will use Google technology such as TensorFlow, Google Cloud, and Android to create the curriculum.
Professor Suh’s “TensorFlow for Information Theory and Convex Optimization “will be used for curriculum in the graduate courses and Professor Yoon’s “AI Convergence Project Based Learning (PBL)” will be used for online courses. Professor Yoon’s course will explore and define problems by utilizing AI and experiencing the process of developing products that use AI through design thinking, which involves product design, production, and verification. Professor Suh’s course will discus“information theory and convergence,” which uses basic sciences and engineering as well as AI, machine learning, and deep learning.
2019.12.04 View 11127 -
 Object Identification and Interaction with a Smartphone Knock
(Professor Lee (far right) demonstrate 'Knocker' with his students.)
A KAIST team has featured a new technology, “Knocker”, which identifies objects and executes actions just by knocking on it with the smartphone. Software powered by machine learning of sounds, vibrations, and other reactions will perform the users’ directions.
What separates Knocker from existing technology is the sensor fusion of sound and motion. Previously, object identification used either computer vision technology with cameras or hardware such as RFID (Radio Frequency Identification) tags. These solutions all have their limitations. For computer vision technology, users need to take pictures of every item. Even worse, the technology will not work well in poor lighting situations. Using hardware leads to additional costs and labor burdens.
Knocker, on the other hand, can identify objects even in dark environments only with a smartphone, without requiring any specialized hardware or using a camera. Knocker utilizes the smartphone’s built-in sensors such as a microphone, an accelerometer, and a gyroscope to capture a unique set of responses generated when a smartphone is knocked against an object. Machine learning is used to analyze these responses and classify and identify objects.
The research team under Professor Sung-Ju Lee from the School of Computing confirmed the applicability of Knocker technology using 23 everyday objects such as books, laptop computers, water bottles, and bicycles. In noisy environments such as a busy café or on the side of a road, it achieved 83% identification accuracy. In a quiet indoor environment, the accuracy rose to 98%.
The team believes Knocker will open a new paradigm of object interaction. For instance, by knocking on an empty water bottle, a smartphone can automatically order new water bottles from a merchant app. When integrated with IoT devices, knocking on a bed’s headboard before going to sleep could turn off the lights and set an alarm. The team suggested and implemented 15 application cases in the paper, presented during the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp 2019) held in London last month.
Professor Sung-Ju Lee said, “This new technology does not require any specialized sensor or hardware. It simply uses the built-in sensors on smartphones and takes advantage of the power of machine learning. It’s a software solution that everyday smartphone users could immediately benefit from.” He continued, “This technology enables users to conveniently interact with their favorite objects.”
The research was supported in part by the Next-Generation Information Computing Development Program through the National Research Foundation of Korea funded by the Ministry of Science and ICT and an Institute for Information & Communications Technology Promotion (IITP) grant funded by the Ministry of Science and ICT.
Figure: An example knock on a bottle. Knocker identifies the object by analyzing a unique set of responses from the knock, and automatically launches a proper application or service.
2019.10.02 View 25199
Object Identification and Interaction with a Smartphone Knock
(Professor Lee (far right) demonstrate 'Knocker' with his students.)
A KAIST team has featured a new technology, “Knocker”, which identifies objects and executes actions just by knocking on it with the smartphone. Software powered by machine learning of sounds, vibrations, and other reactions will perform the users’ directions.
What separates Knocker from existing technology is the sensor fusion of sound and motion. Previously, object identification used either computer vision technology with cameras or hardware such as RFID (Radio Frequency Identification) tags. These solutions all have their limitations. For computer vision technology, users need to take pictures of every item. Even worse, the technology will not work well in poor lighting situations. Using hardware leads to additional costs and labor burdens.
Knocker, on the other hand, can identify objects even in dark environments only with a smartphone, without requiring any specialized hardware or using a camera. Knocker utilizes the smartphone’s built-in sensors such as a microphone, an accelerometer, and a gyroscope to capture a unique set of responses generated when a smartphone is knocked against an object. Machine learning is used to analyze these responses and classify and identify objects.
The research team under Professor Sung-Ju Lee from the School of Computing confirmed the applicability of Knocker technology using 23 everyday objects such as books, laptop computers, water bottles, and bicycles. In noisy environments such as a busy café or on the side of a road, it achieved 83% identification accuracy. In a quiet indoor environment, the accuracy rose to 98%.
The team believes Knocker will open a new paradigm of object interaction. For instance, by knocking on an empty water bottle, a smartphone can automatically order new water bottles from a merchant app. When integrated with IoT devices, knocking on a bed’s headboard before going to sleep could turn off the lights and set an alarm. The team suggested and implemented 15 application cases in the paper, presented during the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp 2019) held in London last month.
Professor Sung-Ju Lee said, “This new technology does not require any specialized sensor or hardware. It simply uses the built-in sensors on smartphones and takes advantage of the power of machine learning. It’s a software solution that everyday smartphone users could immediately benefit from.” He continued, “This technology enables users to conveniently interact with their favorite objects.”
The research was supported in part by the Next-Generation Information Computing Development Program through the National Research Foundation of Korea funded by the Ministry of Science and ICT and an Institute for Information & Communications Technology Promotion (IITP) grant funded by the Ministry of Science and ICT.
Figure: An example knock on a bottle. Knocker identifies the object by analyzing a unique set of responses from the knock, and automatically launches a proper application or service.
2019.10.02 View 25199 -
 'Flying Drones for Rescue'
(Video Credit: ⓒNASA JPL)
< Team USRG and Professor Shim (second from the right) >
Having recently won the AI R&D Grand Challenge Competition in Korea, Team USRG (Unmanned System Research Group) led by Professor Hyunchul Shim from the School of Electrical Engineering is all geared up to take on their next challenges: the ‘Defense Advanced Research Projects Agency Subterranean Challenge (DARPA SubT Challenge)’ and ‘Lockheed Martin’s AlphaPilot Challenge’ next month.
Team USRG won the obstacle course race in the ‘2019 AI R&D Grand Challenge Competition’ on July 12. They managed to successfully dominate the challenging category of ‘control intelligence.’ Having to complete the obstacle course race solely using AI systems without any connection to the internet made it difficult for most of the eight participating teams to pass the third section of the race, and only Team USRG passed the long pipeline course during their attempt in the main event. They also demonstrated, after the main event, that their drone can navigate all of the checkpoints including landing on the “H” mark using deep learning.
Their drone flew through polls and pipes, and escaped from windows and mazes against strong winds, amid cheers and groans from the crowd gathered at the Korea Exhibition Center (KINTEX) in Goyang, Korea. The team was awarded three million KRW in prize money, and received a research grant worth six hundred million KRW from the Ministry of Science and ICT (MSIT).
“Being ranked first in the race for which we were never given a chance for a test flight means a lot to our team. Considering that we had no information on the exact size of the course in advance, this is a startling result,” said Professor Shim. “We will carry out further research with this funding, and compete once again with the improved AI and drone technology in the 2020 competition,” he added.
The AI R&D Grand Challenge Competition, which was first started in 2017, has been designed to promote AI research and development and expand its application to addressing high-risk technical challenges with significant socio-economic impact.
This year’s competition presented participants with a task where they had to develop AI software technology for drones to navigate themselves autonomously during complex disaster relief operations such as aid delivery.
Each team participated in one of the four tracks of the competition, and their drones were evaluated based on the criteria for each track. The divisions were broken up into intelligent context-awareness, intelligent character recognition, auditory intelligence, and control intelligence.
Team USRG’s technological prowess has been already well acclaimed among international peer groups. Teamed up with NASA JPL, Caltech, and MIT, they will compete in the subterranean mission during the ‘DARPA SubT Challenge’.
Team CoSTAR, as its name stands for, is working together to build ‘Collaborative SubTerranean Autonomous Resilient Robots.’ Professor Shim emphasized the role KAIST plays in Team CoSTAR as a leader in drone technology.
“I think when our drone technology will be added to our peers’ AI and robotics, Team CoSTAR will bring out unsurpassable synergy in completing the subterrestrial and planetary applications. I would like to follow the footprint of Hubo, the winning champion of the 2015 DARPA Robotics Challenge and even extend it to subterranean exploration,” he said.
These next generation autonomous subsurface explorers are now all optimizing the physical AI robot systems developed by Team CoSTAR. They will test their systems in more realistic field environments August 15 through 22 in Pittsburgh, USA. They have already received funding from DARPA for participating.
Team CoSTAR will compete in three consecutive yearly events starting this year, and the last event, planned for 2021, will put the team to the final test with courses that incorporate diverse challenges from all three events. Two million USD will be awarded to the winner after the final event, with additional prizes of up to 200,000 USD for self-funded teams.
Team USRG also ranked third in the recent Hyundai Motor Company’s ‘Autonomous Vehicle Competition’ and another challenge is on the horizon: Lockheed Martin’s ‘AlphaPilot Challenge’. In this event, the teams will be flying their drones through a series of racing gates, trying to beat the best human pilot. The challenge is hosted by Lockheed Martin, the world’s largest military contractor and the maker of the famed F-22 and F-35 stealth fighters, with the goal of stimulating the development of autonomous drones. Team USRG was selected from out of more than 400 teams from around the world and is preparing for a series of races this fall, beginning from the end of August.
Professor Shim said, “It is not easy to perform in a series of competitions in just a few months, but my students are smart, hardworking, and highly motivated. These events indeed demand a lot, but they really challenge the researchers to come up with technologies that work in the real world. This is the way robotics really should be.”
(END)
2019.07.26 View 9967
'Flying Drones for Rescue'
(Video Credit: ⓒNASA JPL)
< Team USRG and Professor Shim (second from the right) >
Having recently won the AI R&D Grand Challenge Competition in Korea, Team USRG (Unmanned System Research Group) led by Professor Hyunchul Shim from the School of Electrical Engineering is all geared up to take on their next challenges: the ‘Defense Advanced Research Projects Agency Subterranean Challenge (DARPA SubT Challenge)’ and ‘Lockheed Martin’s AlphaPilot Challenge’ next month.
Team USRG won the obstacle course race in the ‘2019 AI R&D Grand Challenge Competition’ on July 12. They managed to successfully dominate the challenging category of ‘control intelligence.’ Having to complete the obstacle course race solely using AI systems without any connection to the internet made it difficult for most of the eight participating teams to pass the third section of the race, and only Team USRG passed the long pipeline course during their attempt in the main event. They also demonstrated, after the main event, that their drone can navigate all of the checkpoints including landing on the “H” mark using deep learning.
Their drone flew through polls and pipes, and escaped from windows and mazes against strong winds, amid cheers and groans from the crowd gathered at the Korea Exhibition Center (KINTEX) in Goyang, Korea. The team was awarded three million KRW in prize money, and received a research grant worth six hundred million KRW from the Ministry of Science and ICT (MSIT).
“Being ranked first in the race for which we were never given a chance for a test flight means a lot to our team. Considering that we had no information on the exact size of the course in advance, this is a startling result,” said Professor Shim. “We will carry out further research with this funding, and compete once again with the improved AI and drone technology in the 2020 competition,” he added.
The AI R&D Grand Challenge Competition, which was first started in 2017, has been designed to promote AI research and development and expand its application to addressing high-risk technical challenges with significant socio-economic impact.
This year’s competition presented participants with a task where they had to develop AI software technology for drones to navigate themselves autonomously during complex disaster relief operations such as aid delivery.
Each team participated in one of the four tracks of the competition, and their drones were evaluated based on the criteria for each track. The divisions were broken up into intelligent context-awareness, intelligent character recognition, auditory intelligence, and control intelligence.
Team USRG’s technological prowess has been already well acclaimed among international peer groups. Teamed up with NASA JPL, Caltech, and MIT, they will compete in the subterranean mission during the ‘DARPA SubT Challenge’.
Team CoSTAR, as its name stands for, is working together to build ‘Collaborative SubTerranean Autonomous Resilient Robots.’ Professor Shim emphasized the role KAIST plays in Team CoSTAR as a leader in drone technology.
“I think when our drone technology will be added to our peers’ AI and robotics, Team CoSTAR will bring out unsurpassable synergy in completing the subterrestrial and planetary applications. I would like to follow the footprint of Hubo, the winning champion of the 2015 DARPA Robotics Challenge and even extend it to subterranean exploration,” he said.
These next generation autonomous subsurface explorers are now all optimizing the physical AI robot systems developed by Team CoSTAR. They will test their systems in more realistic field environments August 15 through 22 in Pittsburgh, USA. They have already received funding from DARPA for participating.
Team CoSTAR will compete in three consecutive yearly events starting this year, and the last event, planned for 2021, will put the team to the final test with courses that incorporate diverse challenges from all three events. Two million USD will be awarded to the winner after the final event, with additional prizes of up to 200,000 USD for self-funded teams.
Team USRG also ranked third in the recent Hyundai Motor Company’s ‘Autonomous Vehicle Competition’ and another challenge is on the horizon: Lockheed Martin’s ‘AlphaPilot Challenge’. In this event, the teams will be flying their drones through a series of racing gates, trying to beat the best human pilot. The challenge is hosted by Lockheed Martin, the world’s largest military contractor and the maker of the famed F-22 and F-35 stealth fighters, with the goal of stimulating the development of autonomous drones. Team USRG was selected from out of more than 400 teams from around the world and is preparing for a series of races this fall, beginning from the end of August.
Professor Shim said, “It is not easy to perform in a series of competitions in just a few months, but my students are smart, hardworking, and highly motivated. These events indeed demand a lot, but they really challenge the researchers to come up with technologies that work in the real world. This is the way robotics really should be.”
(END)
2019.07.26 View 9967 -
 Deep Learning-Powered 'DeepEC' Helps Accurately Understand Enzyme Functions
(Figure: Overall scheme of DeepEC)
A deep learning-powered computational framework, ‘DeepEC,’ will allow the high-quality and high-throughput prediction of enzyme commission numbers, which is essential for the accurate understanding of enzyme functions.
A team of Dr. Jae Yong Ryu, Professor Hyun Uk Kim, and Distinguished Professor Sang Yup Lee at KAIST reported the computational framework powered by deep learning that predicts enzyme commission (EC) numbers with high precision in a high-throughput manner.
DeepEC takes a protein sequence as an input and accurately predicts EC numbers as an output. Enzymes are proteins that catalyze biochemical reactions and EC numbers consisting of four level numbers (i.e., a.b.c.d) indicate biochemical reactions. Thus, the identification of EC numbers is critical for accurately understanding enzyme functions and metabolism.
EC numbers are usually given to a protein sequence encoding an enzyme during a genome annotation procedure. Because of the importance of EC numbers, several EC number prediction tools have been developed, but they have room for further improvement with respect to computation time, precision, coverage, and the total size of the files needed for the EC number prediction.
DeepEC uses three convolutional neural networks (CNNs) as a major engine for the prediction of EC numbers, and also implements homology analysis for EC numbers if the three CNNs do not produce reliable EC numbers for a given protein sequence. DeepEC was developed by using a gold standard dataset covering 1,388,606 protein sequences and 4,669 EC numbers.
In particular, benchmarking studies of DeepEC and five other representative EC number prediction tools showed that DeepEC made the most precise and fastest predictions for EC numbers. DeepEC also required the smallest disk space for implementation, which makes it an ideal third-party software component.
Furthermore, DeepEC was the most sensitive in detecting enzymatic function loss as a result of mutations in domains/binding site residue of protein sequences; in this comparative analysis, all the domains or binding site residue were substituted with L-alanine residue in order to remove the protein function, which is known as the L-alanine scanning method.
This study was published online in the Proceedings of the National Academy of Sciences of the United States of America (PNAS) on June 20, 2019, entitled “Deep learning enables high-quality and high-throughput prediction of enzyme commission numbers.”
“DeepEC can be used as an independent tool and also as a third-party software component in combination with other computational platforms that examine metabolic reactions. DeepEC is freely available online,” said Professor Kim.
Distinguished Professor Lee said, “With DeepEC, it has become possible to process ever-increasing volumes of protein sequence data more efficiently and more accurately.”
This work was supported by the Technology Development Program to Solve Climate Changes on Systems Metabolic Engineering for Biorefineries from the Ministry of Science and ICT through the National Research Foundation of Korea. This work was also funded by the Bio & Medical Technology Development Program of the National Research Foundation of Korea funded by the Korean government, the Ministry of Science and ICT.
Profile:
-Professor Hyun Uk Kim (ehukim@kaist.ac.kr)
https://sites.google.com/view/ehukim
Department of Chemical and Biomolecular Engineering
-Distinguished Professor Sang Yup Lee (leesy@kaist.ac.kr)
Department of Chemical and Biomolecular Engineering
http://mbel.kaist.ac.kr
2019.07.09 View 34380
Deep Learning-Powered 'DeepEC' Helps Accurately Understand Enzyme Functions
(Figure: Overall scheme of DeepEC)
A deep learning-powered computational framework, ‘DeepEC,’ will allow the high-quality and high-throughput prediction of enzyme commission numbers, which is essential for the accurate understanding of enzyme functions.
A team of Dr. Jae Yong Ryu, Professor Hyun Uk Kim, and Distinguished Professor Sang Yup Lee at KAIST reported the computational framework powered by deep learning that predicts enzyme commission (EC) numbers with high precision in a high-throughput manner.
DeepEC takes a protein sequence as an input and accurately predicts EC numbers as an output. Enzymes are proteins that catalyze biochemical reactions and EC numbers consisting of four level numbers (i.e., a.b.c.d) indicate biochemical reactions. Thus, the identification of EC numbers is critical for accurately understanding enzyme functions and metabolism.
EC numbers are usually given to a protein sequence encoding an enzyme during a genome annotation procedure. Because of the importance of EC numbers, several EC number prediction tools have been developed, but they have room for further improvement with respect to computation time, precision, coverage, and the total size of the files needed for the EC number prediction.
DeepEC uses three convolutional neural networks (CNNs) as a major engine for the prediction of EC numbers, and also implements homology analysis for EC numbers if the three CNNs do not produce reliable EC numbers for a given protein sequence. DeepEC was developed by using a gold standard dataset covering 1,388,606 protein sequences and 4,669 EC numbers.
In particular, benchmarking studies of DeepEC and five other representative EC number prediction tools showed that DeepEC made the most precise and fastest predictions for EC numbers. DeepEC also required the smallest disk space for implementation, which makes it an ideal third-party software component.
Furthermore, DeepEC was the most sensitive in detecting enzymatic function loss as a result of mutations in domains/binding site residue of protein sequences; in this comparative analysis, all the domains or binding site residue were substituted with L-alanine residue in order to remove the protein function, which is known as the L-alanine scanning method.
This study was published online in the Proceedings of the National Academy of Sciences of the United States of America (PNAS) on June 20, 2019, entitled “Deep learning enables high-quality and high-throughput prediction of enzyme commission numbers.”
“DeepEC can be used as an independent tool and also as a third-party software component in combination with other computational platforms that examine metabolic reactions. DeepEC is freely available online,” said Professor Kim.
Distinguished Professor Lee said, “With DeepEC, it has become possible to process ever-increasing volumes of protein sequence data more efficiently and more accurately.”
This work was supported by the Technology Development Program to Solve Climate Changes on Systems Metabolic Engineering for Biorefineries from the Ministry of Science and ICT through the National Research Foundation of Korea. This work was also funded by the Bio & Medical Technology Development Program of the National Research Foundation of Korea funded by the Korean government, the Ministry of Science and ICT.
Profile:
-Professor Hyun Uk Kim (ehukim@kaist.ac.kr)
https://sites.google.com/view/ehukim
Department of Chemical and Biomolecular Engineering
-Distinguished Professor Sang Yup Lee (leesy@kaist.ac.kr)
Department of Chemical and Biomolecular Engineering
http://mbel.kaist.ac.kr
2019.07.09 View 34380 -
 Professor Lee Elected as a Council Member of ION
< Professor Jiyun Lee >
Professor Jiyun Lee from the Department of Aerospace Engineering became the first professor of Korean university to be selected as a council member of the Institute of Navigation (ION), serving specifically as a technical representative.
ION is a world-leading organization established in 1945 and dedicated to advancing Positioning, Navigation and Timing (PNT) technologies. ION’s international membership is drawn not only from professionals in the fields of navigation, engineering, astronomy, education, and general aviation and the airline industry, but also from various supporting institutions, corporations, and government agencies.
Professor Lee has been actively engaged in the Institute’s academic and community activities as a technical advisor for the Satellite Division in the Asia-Pacific region, a chair of the International Technical Meeting, as well as a section chair of the Global Navigation Satellite System (GNSS+) Conference. She has also published 34 papers in numerous ION journals and conference proceedings over the past 10 years while serving as an associate editor of the ION Navigation Journal.
From these activities, Professor Lee was recognized for her academic achievements and committed leadership, which led her to be appointed as the first professor from a Korean university to participate on the Council. She will serve her term over the next two years, and conduct day-to-day operations for the Institute mainly related to developing new programs and strategies for the advancement of PNT technologies and discovering new distinguished members.
2019.06.27 View 5485
Professor Lee Elected as a Council Member of ION
< Professor Jiyun Lee >
Professor Jiyun Lee from the Department of Aerospace Engineering became the first professor of Korean university to be selected as a council member of the Institute of Navigation (ION), serving specifically as a technical representative.
ION is a world-leading organization established in 1945 and dedicated to advancing Positioning, Navigation and Timing (PNT) technologies. ION’s international membership is drawn not only from professionals in the fields of navigation, engineering, astronomy, education, and general aviation and the airline industry, but also from various supporting institutions, corporations, and government agencies.
Professor Lee has been actively engaged in the Institute’s academic and community activities as a technical advisor for the Satellite Division in the Asia-Pacific region, a chair of the International Technical Meeting, as well as a section chair of the Global Navigation Satellite System (GNSS+) Conference. She has also published 34 papers in numerous ION journals and conference proceedings over the past 10 years while serving as an associate editor of the ION Navigation Journal.
From these activities, Professor Lee was recognized for her academic achievements and committed leadership, which led her to be appointed as the first professor from a Korean university to participate on the Council. She will serve her term over the next two years, and conduct day-to-day operations for the Institute mainly related to developing new programs and strategies for the advancement of PNT technologies and discovering new distinguished members.
2019.06.27 View 5485 -
 Wearable Robot 'WalkON Suit' Off to Cybathlon 2020
Standing upright and walking alone are very simple but noble motions that separate humans from many other creatures. Wearable and prosthetic technologies have emerged to augment human function in locomotion and manipulation. However, advances in wearable robot technology have been especially momentous to Byoung-Wook Kim, a triplegic for 22 years following a devastating car accident.
Kim rejoiced after standing upright and walking again by putting on the ‘WalkON Suit,’ the wearable robot developed by Professor Kyoungchul Kong’s team. Even more, Kim won third prize in the powered exoskeleton race at Cybathlon 2016, an international cyborg Olympics hosted by ETH Zurich.
Now Kim and Professor Kong’s team are all geared up for the Cybathlon Championship 2020. Professor Kong and his startup, Angel Robotics, held a kickoff ceremony for Cybathlon 2020 at KAIST on June 24. The 2020 championship will take place in Switzerland.
Only pilots with complete paralysis of the legs resulting from spinal cord injuries are eligible to participate in the Cybathlon, which takes place every four years. Pilots compete against each other while completing everyday tasks using technical assistance systems in six different disciplines: a brain-computer interface race, a functional electrical stimulation bike race, a powered arm prosthesis race, a powered leg prosthesis race, a powered exoskeleton race, and a powered wheelchair race. The 2016 championship drew 66 pilots from 56 teams representing 25 countries.
In the powered exoskeleton race, pilots complete everyday activities such as getting up from a sofa and overcoming obstacles such as stairs, ramps, or slopes and up to four pilots compete simultaneously on tracks to solve six tasks; and the pilot that solves the most tasks in the least amount of time wins the race.
(Kim, a triplegic for 22 years demonstrates walking and climbing the stairs (below photo) wearing the WalkOn Suit during the media day on June 21 at KAIST.)
Kim, who demonstrated walking and climbing the stairs wearing the WalkON Suit during the media day for the Cybathlon 2020 kickoff ceremony on June 21 at KAIST, said, “I have been confined to a wheelchair for more than 20 years. I am used to it so I feel like the wheelchair is one of my body parts. Actually, I don’t feel any big difficulties in doing everyday tasks in wheelchair. But whenever I face the fact that I will never be able to stand up with my own two legs again, I am so devastated.” He continued, “I still remember the day when I stood up with my own two legs by myself after 22 years. It was beyond description.”
The market for wearable robots, especially for exoskeleton robots, is continuing to grow as the aging population has been a major challenge in almost every advanced country. The global market for these robots expects to see annual growth of 41.2% to 8.3 billion US dollars by 2025. Healthcare wearable robots for the elderly and rehabilitation take up the half of the market share followed by wearable robots for industrial and defense purposes.
Professor Kong from the Department of Mechanical Engineering and his colleagues have developed two wearable robot systems in 2014: The "WalkON Suit" for complete paraplegics and “Angel Suit” for those with partial impairment in walking ability such as the elderly and rehabilitation patients.
Professor Kong said after 15 years of basic research, the team is now able to develop its own distinct technologies. He said their robots are powered by non-resistant precision drives with algorithms recognizing the user’s moving intention. Incorporated with prosthetic devices technology from the Severance Rehabilitation Hospital, their control technology has led to the production of a customizable robot suit optimized for each user’s physical condition.
The WalkON Suit, which boasts a maximum force of 250 Nm and maximum rotation speed of 45 RPM, gives the user high-energy efficiency modeled after the physiology of the human leg. It allows users to walk on flat ground and down stairs, climb up and down inclines, and sit and lie down. Currently the battery lasts five to six hours for locomotion and the approximate 25 kg of robot weight still remains a technical challenge to upgrade.
Professor Kong’s team has grafted AR glass technology into the WalkOn Suit that one of his pilots put on for the torch relay of the PyongChang Paralympics in 2018. His team is now upgrading the WalkON Suit 4.0 for next year’s competition. Severance Rehabilitation Hospital will help the seven pilots with their training.
Professor Kong said his goal is to make robots that can make people with disabilities much more independent. He stressed, “Wearable robots should be designed for each single user. We provide a very good graphical user interface so that we can design, check, and also verify our optimized design for users’ best performance.”
(Seven pilots and Professor Kong (fifth from left in second row) pose with guests who joined the Cybathlon 2020 kickoff ceremony. President Shin (fifth from right) made a congratulatory remarks during the ceremony.)
2019.06.25 View 38040
Wearable Robot 'WalkON Suit' Off to Cybathlon 2020
Standing upright and walking alone are very simple but noble motions that separate humans from many other creatures. Wearable and prosthetic technologies have emerged to augment human function in locomotion and manipulation. However, advances in wearable robot technology have been especially momentous to Byoung-Wook Kim, a triplegic for 22 years following a devastating car accident.
Kim rejoiced after standing upright and walking again by putting on the ‘WalkON Suit,’ the wearable robot developed by Professor Kyoungchul Kong’s team. Even more, Kim won third prize in the powered exoskeleton race at Cybathlon 2016, an international cyborg Olympics hosted by ETH Zurich.
Now Kim and Professor Kong’s team are all geared up for the Cybathlon Championship 2020. Professor Kong and his startup, Angel Robotics, held a kickoff ceremony for Cybathlon 2020 at KAIST on June 24. The 2020 championship will take place in Switzerland.
Only pilots with complete paralysis of the legs resulting from spinal cord injuries are eligible to participate in the Cybathlon, which takes place every four years. Pilots compete against each other while completing everyday tasks using technical assistance systems in six different disciplines: a brain-computer interface race, a functional electrical stimulation bike race, a powered arm prosthesis race, a powered leg prosthesis race, a powered exoskeleton race, and a powered wheelchair race. The 2016 championship drew 66 pilots from 56 teams representing 25 countries.
In the powered exoskeleton race, pilots complete everyday activities such as getting up from a sofa and overcoming obstacles such as stairs, ramps, or slopes and up to four pilots compete simultaneously on tracks to solve six tasks; and the pilot that solves the most tasks in the least amount of time wins the race.
(Kim, a triplegic for 22 years demonstrates walking and climbing the stairs (below photo) wearing the WalkOn Suit during the media day on June 21 at KAIST.)
Kim, who demonstrated walking and climbing the stairs wearing the WalkON Suit during the media day for the Cybathlon 2020 kickoff ceremony on June 21 at KAIST, said, “I have been confined to a wheelchair for more than 20 years. I am used to it so I feel like the wheelchair is one of my body parts. Actually, I don’t feel any big difficulties in doing everyday tasks in wheelchair. But whenever I face the fact that I will never be able to stand up with my own two legs again, I am so devastated.” He continued, “I still remember the day when I stood up with my own two legs by myself after 22 years. It was beyond description.”
The market for wearable robots, especially for exoskeleton robots, is continuing to grow as the aging population has been a major challenge in almost every advanced country. The global market for these robots expects to see annual growth of 41.2% to 8.3 billion US dollars by 2025. Healthcare wearable robots for the elderly and rehabilitation take up the half of the market share followed by wearable robots for industrial and defense purposes.
Professor Kong from the Department of Mechanical Engineering and his colleagues have developed two wearable robot systems in 2014: The "WalkON Suit" for complete paraplegics and “Angel Suit” for those with partial impairment in walking ability such as the elderly and rehabilitation patients.
Professor Kong said after 15 years of basic research, the team is now able to develop its own distinct technologies. He said their robots are powered by non-resistant precision drives with algorithms recognizing the user’s moving intention. Incorporated with prosthetic devices technology from the Severance Rehabilitation Hospital, their control technology has led to the production of a customizable robot suit optimized for each user’s physical condition.
The WalkON Suit, which boasts a maximum force of 250 Nm and maximum rotation speed of 45 RPM, gives the user high-energy efficiency modeled after the physiology of the human leg. It allows users to walk on flat ground and down stairs, climb up and down inclines, and sit and lie down. Currently the battery lasts five to six hours for locomotion and the approximate 25 kg of robot weight still remains a technical challenge to upgrade.
Professor Kong’s team has grafted AR glass technology into the WalkOn Suit that one of his pilots put on for the torch relay of the PyongChang Paralympics in 2018. His team is now upgrading the WalkON Suit 4.0 for next year’s competition. Severance Rehabilitation Hospital will help the seven pilots with their training.
Professor Kong said his goal is to make robots that can make people with disabilities much more independent. He stressed, “Wearable robots should be designed for each single user. We provide a very good graphical user interface so that we can design, check, and also verify our optimized design for users’ best performance.”
(Seven pilots and Professor Kong (fifth from left in second row) pose with guests who joined the Cybathlon 2020 kickoff ceremony. President Shin (fifth from right) made a congratulatory remarks during the ceremony.)
2019.06.25 View 38040 -
 Anti-drone Technology for Anti-Terrorism Applications
(from top right clockwise: Professor Yongdae Kim,
PhD Candidates Yujin Kwon, Juhwan Noh, Hocheol Shin, and Dohyun Kim)
KAIST researchers have developed anti-drone technology that can hijack other drones by spoofing its location using fake GPS signals. This technology can safely guide a drone to a desired location without any sudden change in direction in emergency situations, and thus respond effectively to dangerous drones such as those intending to carry out acts of terrorism.
Advancements in the drone industry have led to the wider use of drones in our daily lives in areas of reconnaissance, searching and rescuing, disaster prevention and response, and delivery services. At the same time, there has also been a growing concern about privacy, safety, and security issues regarding drones, especially those arising from intrusion into private property and secure facilities. Therefore, the anti-drone industry is rapidly expanding to detect and respond to this possible drone invasion.
The current anti-drone systems used in airports and other key locations utilize electronic jamming signals, high-power lasers, or nets to neutralize drones. For example, drones trespassing on airports are often countered with simple jamming signals that can prevent the drones from moving and changing position, but this may result in a prolonged delay in flight departures and arrivals at the airports. Drones used for terrorist attacks – armed with explosives or weapons – must also be neutralized a safe distance from the public and vital infrastructure to minimize any damage.
Due to this need for a new anti-drone technology to counter these threats, a KAIST research team led by Professor Yongdae Kim from the School of Electrical Engineering has developed technology that securely thwarts drones by tricking them with fake GPS signals.
Fake GPS signals have been used in previous studies to cause confusion inside the drone regarding its location, making the drone drift from its position or path. However, such attack tactics cannot be applied in GPS safety mode. GPS safety mode is an emergency mode that ensures drone safety when the signal is cut or location accuracy is low due to a fake GPS signals. This mode differs between models and manufacturers.
Professor Kim’s team analyzed the GPS safety mode of different drone models made from major drone manufacturers such as DJI and Parrot, made classification systems, and designed a drone abduction technique that covers almost all the types of drone GPS safety modes, and is universally applicable to any drone that uses GPS regardless of model or manufacturer. The research team applied their new technique to four different drones and have proven that the drones can be safely hijacked and guided to the direction of intentional abduction within a small margin of error.
Professor Kim said, “Conventional consumer drones equipped with GPS safety mode seem to be safe from fake GPS signals, however, most of these drones are able to be detoured since they detect GPS errors in a rudimentary manner.” He continued, “This technology can contribute particularly to reducing damage to airports and the airline industry caused by illegal drone flights.”
The research team is planning to commercialize the developed technology by applying it to existing anti-drone solutions through technology transfer.” This research, featured in the ACM Transactions on Privacy and Security (TOPS) on April 9, was supported by the Defense Acquisition Program Administration (DAPA) and the Agency for Defense Development (ADD).
Image 1.
Experimental environment in which a fake GPS signal was produced from a PC and injected into the drone signal using directional antennae
Publication:
Juhwan Noh, Yujin Kwon, Yunmok Son, Hocheol Shin, Dohyun Kim, Jaeyeong Choi, and Yongdae Kim. 2019. Tractor Beam: Safe-hijacking of Consumer Drones with Adaptive GPS Spoofing. ACM Transactions on Privacy and Security. New York, NY, USA, Vol. 22, No. 2, Article 12, 26 pages. https://doi.org/10.1145/3309735
Profile: Prof. Yongdae Kim, MS, PhD
yongdaek@kaist.ac.kr
https://www.syssec.kr/
Professor
School of Electrical Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr Daejeon 34141, Korea
Profile: Juhwan Noh, PhD Candidate
juhwan@kaist.ac.kr
PhD Candidate
System Security (SysSec) Lab
School of Electrical Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr Daejeon 34141, Korea
(END)
2019.06.25 View 42210
Anti-drone Technology for Anti-Terrorism Applications
(from top right clockwise: Professor Yongdae Kim,
PhD Candidates Yujin Kwon, Juhwan Noh, Hocheol Shin, and Dohyun Kim)
KAIST researchers have developed anti-drone technology that can hijack other drones by spoofing its location using fake GPS signals. This technology can safely guide a drone to a desired location without any sudden change in direction in emergency situations, and thus respond effectively to dangerous drones such as those intending to carry out acts of terrorism.
Advancements in the drone industry have led to the wider use of drones in our daily lives in areas of reconnaissance, searching and rescuing, disaster prevention and response, and delivery services. At the same time, there has also been a growing concern about privacy, safety, and security issues regarding drones, especially those arising from intrusion into private property and secure facilities. Therefore, the anti-drone industry is rapidly expanding to detect and respond to this possible drone invasion.
The current anti-drone systems used in airports and other key locations utilize electronic jamming signals, high-power lasers, or nets to neutralize drones. For example, drones trespassing on airports are often countered with simple jamming signals that can prevent the drones from moving and changing position, but this may result in a prolonged delay in flight departures and arrivals at the airports. Drones used for terrorist attacks – armed with explosives or weapons – must also be neutralized a safe distance from the public and vital infrastructure to minimize any damage.
Due to this need for a new anti-drone technology to counter these threats, a KAIST research team led by Professor Yongdae Kim from the School of Electrical Engineering has developed technology that securely thwarts drones by tricking them with fake GPS signals.
Fake GPS signals have been used in previous studies to cause confusion inside the drone regarding its location, making the drone drift from its position or path. However, such attack tactics cannot be applied in GPS safety mode. GPS safety mode is an emergency mode that ensures drone safety when the signal is cut or location accuracy is low due to a fake GPS signals. This mode differs between models and manufacturers.
Professor Kim’s team analyzed the GPS safety mode of different drone models made from major drone manufacturers such as DJI and Parrot, made classification systems, and designed a drone abduction technique that covers almost all the types of drone GPS safety modes, and is universally applicable to any drone that uses GPS regardless of model or manufacturer. The research team applied their new technique to four different drones and have proven that the drones can be safely hijacked and guided to the direction of intentional abduction within a small margin of error.
Professor Kim said, “Conventional consumer drones equipped with GPS safety mode seem to be safe from fake GPS signals, however, most of these drones are able to be detoured since they detect GPS errors in a rudimentary manner.” He continued, “This technology can contribute particularly to reducing damage to airports and the airline industry caused by illegal drone flights.”
The research team is planning to commercialize the developed technology by applying it to existing anti-drone solutions through technology transfer.” This research, featured in the ACM Transactions on Privacy and Security (TOPS) on April 9, was supported by the Defense Acquisition Program Administration (DAPA) and the Agency for Defense Development (ADD).
Image 1.
Experimental environment in which a fake GPS signal was produced from a PC and injected into the drone signal using directional antennae
Publication:
Juhwan Noh, Yujin Kwon, Yunmok Son, Hocheol Shin, Dohyun Kim, Jaeyeong Choi, and Yongdae Kim. 2019. Tractor Beam: Safe-hijacking of Consumer Drones with Adaptive GPS Spoofing. ACM Transactions on Privacy and Security. New York, NY, USA, Vol. 22, No. 2, Article 12, 26 pages. https://doi.org/10.1145/3309735
Profile: Prof. Yongdae Kim, MS, PhD
yongdaek@kaist.ac.kr
https://www.syssec.kr/
Professor
School of Electrical Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr Daejeon 34141, Korea
Profile: Juhwan Noh, PhD Candidate
juhwan@kaist.ac.kr
PhD Candidate
System Security (SysSec) Lab
School of Electrical Engineering
Korea Advanced Institute of Science and Technology (KAIST)
http://kaist.ac.kr Daejeon 34141, Korea
(END)
2019.06.25 View 42210